2.1 Sensor Ultrasonik (HC-SR04)
Secara umum sensor didefenisikan sebagai alat yang mampu menangkap fenomena fisika atau kimia kemudian mengubahnya menjadi sinyal electrik baik arus listrik ataupun tegangan. Fenomena fisik yang mampu menstimulus sensor untuk menghasilkan sinyal electrik meliputi temperatur, tekanan, gaya, medan magnet cahaya, pergerakan dan sebagainya. Secara garis besar sensor dibagi menjadi dua bagian, yaitu sensor kimia dan sensor fisika.
Sensor kimia adalah sensor yang mendeteksi jumlah suatu zat kimia dengan cara mengubah besaran kimia menjadi besaran listrikdan biasanya inimelibatkan beberapa reaksi kimia. Yang termasuk ke dalam sensor kimia yaitu sensor PH, sensor gas, sensor ledakan, dan lain sebagainya.
Sensor fisika adalah alat yang mampu mendeteksi suatu besaran
berdasarkan hukum-hukum fisika. Ada bebeapa sensor fisika yang kita kenal seperti sensor suhu, sensor jarak, sensor cahaya, sensor magnet, dan lain sebagainya.
HC-SR04 merupakan sensor ultrasonik yang dapat digunakan untuk mengukur jarak antara penghalang dan sensor. Sensor ini mampu mendeteksi jarak tanpa sentuhan langsung dengan akurasi yang tinggi dan pembacaan yang stabil. Sensor ini sudah tersedia modul trasmitter dan receiver gelombang ultrasonik. Berikut ini spesifikasi dari sensor HC-SR04.
Tabel 2.1 Spesifikasi Sensor HC-SR04
Power Supply +5V DC
Arus daya 15mA
Sudut efektif <15 ͦ
Pembacaan jarak 2cm – 400cm
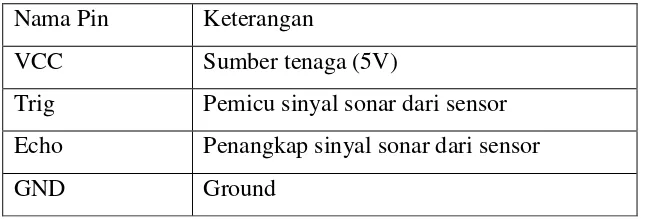
Tabel 2.2 Spesifikasi pin pada Sensor HC-SR04 Nama Pin Keterangan
VCC Sumber tenaga (5V)
Trig Pemicu sinyal sonar dari sensor
Echo Penangkap sinyal sonar dari sensor
GND Ground
Konfigurasi pin dan tampilan sensor HC-SR04 diperlihatkan pada gambar di
bawah ini
Gambar 2.1 Konfigurasi pin dan tampilan sensor ultrasonik HC-SR04
HC-SR04 memiliki 2 komponen utama sebagai penyusunnya yaitu
ultrasonic transmitter dan ultrasonic receiver. Fungsi dari ultrasonic transmitter
adalah memancarkan gelombang ultrasonik dengan frekuensi 40 KHz kemudian ultrasonic receiver menangkap hasil pantulan gelombang ultrasonik yang mengenai suatu objek. Waktu tempuh gelombang ultrasonik dari pemancar hingga sampai ke penerima sebanding dengan 2 kali jarak antara sensor dan bidang pantul seperti yang diperlihatkan pada gambar berikut:
Prinsip pengukuran jarak menggunakan sensor ultrasonik HC-SR04 adalah ketika pulsa trigger diberikan pada sensor, transmitter akan mulai memancarkan gelombang ultrasonik, pada saat yang sama sensor akan menghasilkan output TLL transisi naik menandakan sensor mulai menghitung waktu pengukuran, setelah
receiver menerima pantulan yang dihasilkan oleh suatu objek maka pengukuran
waktu akan dihentikan dengan menghasilkan output TTL transisi turun. Jika waktu pengukuran adalah t dan kecepatan suara adalah 340 m/s, maka jarak antara sensor dengan objek dihitung dengan menggunakan persamaan 2.1 berikut
2
s = Jarak antara sensor dengan objek (m)
t = Waktu tempuh gelombang ultrasonik dari trasmitter ke receiver (s)
Pemilihan HC-SR04 sebagai sensor jarak yang akan digunakan pada penelitian ini karena memiliki fitur sebagai berikut; kinerja yang stabil, pengukuran jarak yang akurat dengan ketelitian 0,3 cm, pengukuran maksimum dapat mencapai 4 meter dengan jarak minimum 2 cm, ukuran yang ringkas dan dapat beroperasi pada level tegangan TTL.
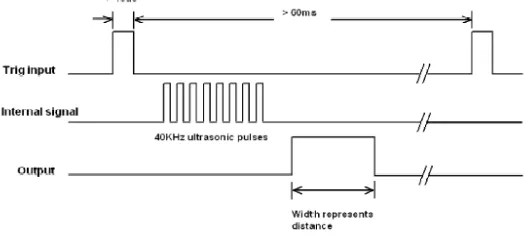
Prinsip pengoperasian sensor ultrasonik HC-SR04 adalah sebagai berikut: awali dengan memberikan pulsa Low (0) ketika modul mulai dioperasikan, kemudian berikan pulsa High (1) pada trigger selama 10 µs sehingga modul mulai memancarkan 8 gelombang kotak dengan frekuensi 40 KHz, tunggu hingga transisi naik terjadi pada output dan mulai perhitungan waktu hingga transisi turun
terjadi, setelah itu gunakan persamaan 2.1 untuk mengukur jarak antara sensor dengan objek. Timing diagram diperlihatkan pada gambar berikut.
2.2 Mikrokontroler ATMega8535
Mikrokontroler adalah IC yang dapat diprogram berulang kali, baik ditulis atau dihapus (Agus Bejo, 2007). Biasanya digunakan untuk pengontrolan otomatis dan manual pada perangkat elektronika. Beberapa tahun terakhir, mikrokontroler sangat banyak digunakan terutama dalam pengontrolan robot. Seiring perkembangan elektronika, mikrokontroler dibuat semakin kompak dengan bahasa pemrograman yang juga ikut berubah. Salah satunya adalah mikrokontroler AVR (Alf and Vegard’s Risc processor) ATmega8535 yang menggunakan teknologi RISC (Reduce Instruction Set Computing) dimana program berjalan lebih cepat karena hanya membutuhkan satu siklus clock untuk mengeksekusi satu instruksi program.
Secara umum, AVR dapat dikelompokkan menjadi 4 kelas, yaitu kelas ATtiny, keluarga AT90Sxx, keluarga ATmega, dan AT86RFxx. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral, dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan hampir sama. Mikrokontroler AVR ATmega8535 memiliki fitur yang
cukup lengkap.
Mikrokontroler AVR ATmega8535 telah dilengkapi dengan ADC internal EEPROM internal, Timer/Counter, PWM, analog comparator, dll (M.Ary
Heryanto, 2008). Sehingga dengan fasilitas yang lengkap ini memungkinkan kita belajar mikrokontroler keluarga AVR dengan lebih mudah dan efisien, serta dapat mengembangkan kreativitas penggunaan mikrokontroler ATmega8535.
Fitur-fitur yang dimiliki oleh mikrokontroler ATmega8535 adalah sebagai berikut:
1. Saluran I/O sebanyak 32 buah, yaitu port A, port B, port C, dan port D. 2. ADC internal sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan. 4. CPU yang terdiri atas 32 buah register.
5. SRAM sebesar 512 byte.
6. Memori Flash sebesar 8 kb dengan kemampuan Read While Write. 7. Port antarmuka SPI
9. Antarmuka komparator analog. 10. Port USART untuk komunikasi serial.
11. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz.
12. Dan lain-lainnya.
Gambar 2.4 Mikrokontroler ATMega8535
2.2.1 Konstruksi ATMega8535
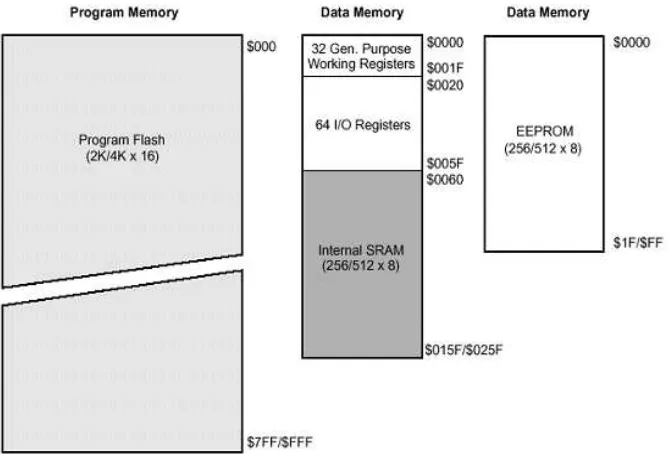
Mikrokontroler ATMega8535 memiliki 3 jenis memori, yaitu memori program, memori data dan memori EEPROM. Ketiganya memiliki ruang sendiri dan terpisah.
a. Memori Program
ATMega8535 memiliki kapasitas memori program sebesar 8 Kbyte yang terpetakan dari alamat 0000h-0FFFh dimana masing-masing alamat memiliki lebar data 16 bit. Memori program ini terbagi menjadi 2 bagian yaitu program
boot dan bagian program aplikasi.
b. Memori Data
sebagai bagian dari memori RAM (menggunakan instruksi LD atau ST) atau dapat juga diakses sebagai I/O (menggunakan instruksi IN atau OUT), dan 512 byte digunakan untuk memori data SRAM.
c. Memori EPROM
ATMega8535 memiliki memori EEPROM sebesar 512 byte yang terpisah dari memori program maupun memori data. Memori EEPROM ini hanya dapat diakses dengan menggunakan register-register I/O yaitu register EEPROM Address, register EEPROM Data, dan register EEPROM Control. Untuk mengakses memori EEPROM ini diperlakukan seperti mengakses data eksternal, sehingga waktu eksekusinya relatif lebih lama bila dibandingkan dengan mengakses data dari SRAM. ATMega8535 merupakan tipe AVR yang telah dilengkapi dengan 8 saluran ADC internal dengan fidelitas 10 bit. Dalam mode operasinya, ADC ATMega8535 dapat dikonfigurasi, baik secara single ended input maupun differential input. Selain itu, ADC ATMega8535 memiliki konfigurasi pewaktuan, tegangan referensi, mode operasi, dan kemampuan filter
derau yang amat fleksibel, sehingga dengan mudah disesuaikan dengan kebutuhan ADC itu sendiri.
ATMega8535 memiliki 3 modul timer yang terdiri dari 2 buah
timer/counter 8 bit dan 1 buah timer/counter 16 bit. Ketiga modul timer/counter ini dapat diatur dalam mode yang berbeda secara individu dan tidak saling mempengaruhi satu sama lain. Selain itu, semua timer/counter juga dapat difungsikan sebagai sumber interupsi. Masing-masing timer/counter ini memiliki register tertentu yang digunakan untuk mengatur mode dan cara kerjanya.
Serial Peripheral Interface (SPI) merupakan salah satu mode komunikasi
serial syncrhronous kecepatan tinggi yang dimiliki oleh ATMega8535. Universal
Syncrhronous and Asyncrhronous Serial Receiver and Transmitter (USART) juga
memungkinkan transmisi data baik secara syncrhronus maupun asyncrhronus, sehingga dengan memiliki USART pasti kompatibel dengan UART.
Gambar 2.5 Memori AVR ATMega8535
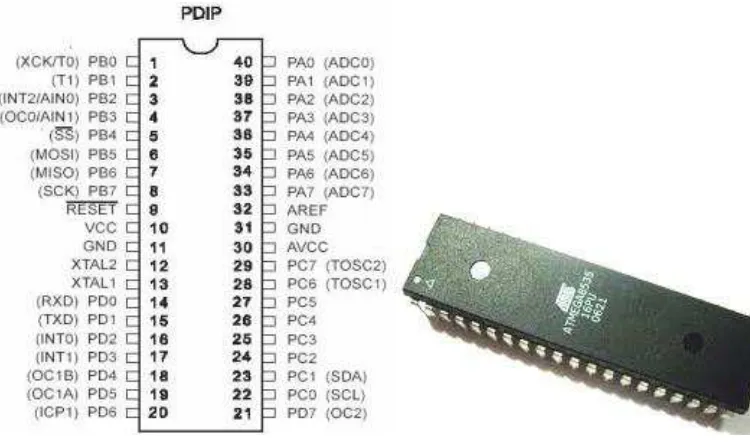
2.2.2 Pin-pin pada Mikrokontroler ATMega8535
Konfigurasi pin ATMega8535 dengan kemasan 40 pin DIP (Dual Inline Package) dapat dilihat pada gambar 2.4. Dari gambar di atas dapat dijelaskan fungsi dari masing-masing pin ATMega8535 sebagai berikut:
1. VCC merupakan pin yang berfungsi sebagai masukan catu daya. 2. GND merupakan pin Ground.
3. Port A (PortA0...PortA7) merupakan pin input/output dua arah dan pin
masukan ADC.
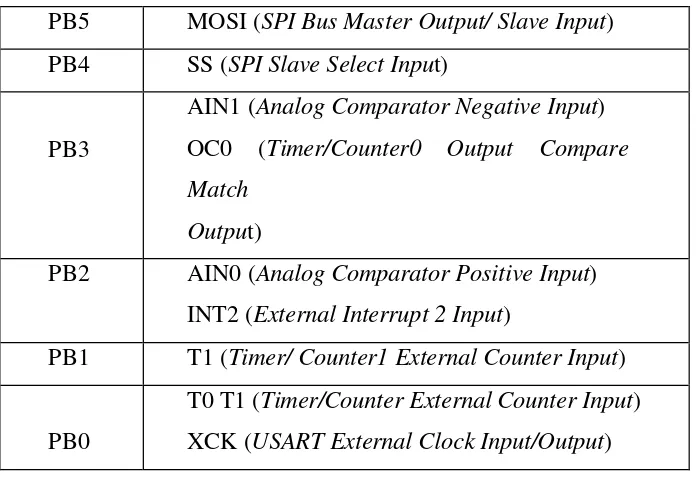
4. Port B (PortB0...PortB7) merupakan pin input/output dua arah dan pin fungsi
khusus, seperti dapat dilihat pada tabel di bawah ini.
Tabel 2.3 Fungsi Khusus Port B
Pin Fungsi Khusus
PB7 SCK (SPI Bus Serial Clock)
PB5 MOSI (SPI Bus Master Output/ Slave Input)
PB4 SS (SPI Slave Select Input)
PB3
AIN1 (Analog Comparator Negative Input)
OC0 (Timer/Counter0 Output Compare Match
Output)
PB2 AIN0 (Analog Comparator Positive Input) INT2 (External Interrupt 2 Input)
PB1 T1 (Timer/ Counter1 External Counter Input)
PB0
T0 T1 (Timer/Counter External Counter Input) XCK (USART External Clock Input/Output)
5. Port C (PortC0...PortC7) merupakan pin input/output dua arah dan pin fungsi
khusus, seperti dapat dilihat pada tabel di bawah ini.
Tabel 2.4 Fungsi Khusus Port C
Pin Fungsi Khusus
PC1 SDA ( Two-wire Serial Buas Data Input/Output Line)
PC0 SCL ( Two-wire Serial Buas Clock Line)
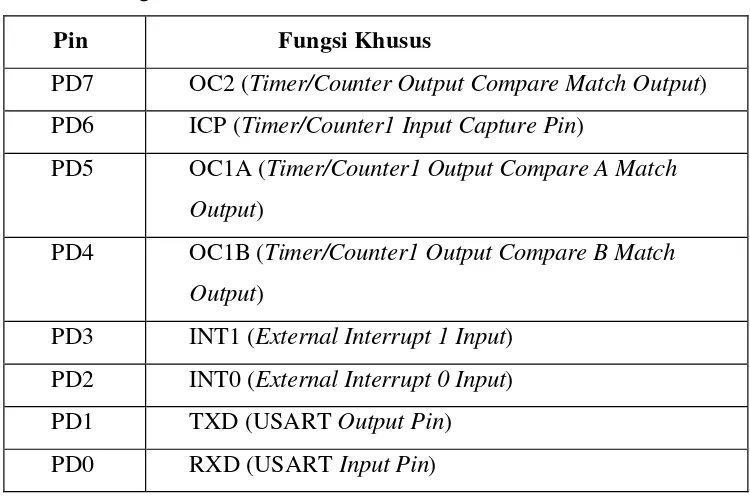
6. Port D (PortD0...PortD7) merupakan pin input/input dua arah dan pin fungsi
Tabel 2.5 Fungsi Khusus Port D
Pin Fungsi Khusus
PD7 OC2 (Timer/Counter Output Compare Match Output)
PD6 ICP (Timer/Counter1 Input Capture Pin)
PD5 OC1A (Timer/Counter1 Output Compare A Match
Output)
PD4 OC1B (Timer/Counter1 Output Compare B Match
Output)
PD3 INT1 (External Interrupt 1 Input)
PD2 INT0 (External Interrupt 0 Input)
PD1 TXD (USART Output Pin)
PD0 RXD (USART Input Pin)
7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler.
8. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal. 9. AVCC merupakan pin masukan tegangan untuk ADC.
10. AREFF merupakan pin masukan tegangan referensi ADC.
2.2.3 Status Register
Status register adalah register berisis yang dihasilkan pada setiap operasi yang dilakukan ketika suatu instruksi dieksekusi. SREG merupakan bagian dari inti CPU mikrokontroler.
Gambar 2.6 Status Register
1. Bit7 I (Global Interrupt Enable), Bit harus di Set untuk meng-enable semua jenis interupsi.
register GPR dapat disalin ke bit T menggunakan instruksi BST, dan sebaliknya bit T dapat disalin kembali kesuatu bit dalam register GPR dengan menggunakan instruksi BLD.
3. Bi5 H (Half Cary Flag)
4. Bit4 S (Sign Bit) merupakan hasil operasi EOR antara flag –N
(negative) dan flag V (complement overflow).
5. Bit3 V (Two’s Component Overflow Flag) Bit ini berfungsi untuk
Transistor adalah suatu komponen aktif terbuat dari bahan semikonduktor. Transistor digunakan di dalam suatu rangkaian untuk memerkuat isyarat, dengan kata lain mengubah isyarat masukan yang lemah menjadi isyarat yang kuat pada
keluaran. Dalam membuat suatu rangkaian penguat perlu diketahui letak titik daripada arus beban agar dapat dirancang sesuai dengan spesifikasi yang diharapkan. (Sutrisno : 1986)
Rangkaian transistor ini digunakan untuk mengendalikan beban yakni relay yang membutuhkan arus yang cukup besar untuk menggerakkan coilnya, sementara dari mikrokontroller tidak cukup besar arus yang dihasilkan untuk menggerakkan relay.
2.4 Relay
lilitan kawat (koil) yang dililitkan pada inti besi lunak. Jika lilitan kawat mendapat aliran arus, inti besi lunak kontak menghasilkan medan magnet dan menarik switch kontak. Switch kontak mengalami gaya listrik magnet sehingga berpindah posisi ke kutublain atau terlepas dari kutub asalnya.
Jenis relay berdasarkan cara kerjanya terbagi atas beberapa bagian seperti berikut:
1. Normal terbuka. Kontak saklar tertutup hanya jika relay dihidupkan 2. Normal tertutup. Kontak saklar terbuka hanya jika relay dihidupkan
3. Tukar-Sambung.Kontak saklar berpindah dari satu kutub ke kutub lain saat relay dihidupkan.
4.Bila arus masuk pada gulungan, maka seketika gulungan akan berubah menjadi medan magnet. Gaya magnet inilah yang akan menarik luas sehingga saklar akan berkerja.
Keadaan ini akan bertahan selama arus mengalir pada kumparan relay. Dan relay akan kembali ke posisi semula (normal), bila tidak ada lagi arus yang mengalir padanya. Posisi normal relay tergantung pada jenis relay yang
digunakan. Biasanya kontak yang akan terhubung saat relay bekerja disebut
Normally Open (NO), sedangkan kontak yang membuka saat relay bekerja disebut
Normally Close (NC). (Djiteng, 2006)
Gambar 2.7 Modul Relay
2.5 LCD 16x2 Karakter
Kegunaan LCD banyak sekali dalam perancangan sistem dengan menggunakan mikrokontoler. LCD dapat berfungsi untuk menampilkan suatu nilai sensor, menampilkan teks, atau menampilkan menu pada aplikasi mikrokontoler. Interface LCD merupakan sebuah parallel bus, dimana hal ini sangat memudahkan dan sangat cepat dalam pembacaan dan penulisan data dari atau ke LCD. Kode ASCII yang ditampilkan sepanjang 8 bit dikirimkan ke LCD secara 4 atau 8 bit pada satu waktu. Jika mode 4 bit yang digunakan, maka 2 nibble data dikirim untuk membuat sepenuhnya 8 bit (pertama dikirim 4 bit MSB lalu 4 bit LSB dengan pulsa clock EN setiap nibblenya). Berikut gambar LCD (16x2 karakter) yang bisa digunakan :
Gambar 2.8 LCD 16x2 karakter
Jalur kontrol EN digunakan untuk memberitahu LCD bahwa mikrokontroler mengirimkan data ke LCD. Untuk mengirim data ke LCD program harus menset EN ke kondisi high (1) dan kemudian menset dua jalur kontol lainnya (RS dan R/W) atau juga mengirimkan data ke jalur data bus. Saat jalur lainnya sudah siap, EN harus diset ke 0 (nol) dan tunggu beberapa saat (tergantung ke pada datasheet LCD), dan set EN kembali ke high (1). Ketika jalur RS berada dalam kondisi low (0), data yang dikirimkan ke LCD dianggap sebagai sebuah perintah atau intruksi khusus (seperti bersihkan layar, posisi kursor dll). Ketika RS berada dalam kondisi high atau 1, data yang dikirimkan adalah data ASCII yang akan ditampilkan dilayar.
hanya satu, yaitu Get LCD status (membaca status LCD), lainnya merupakan intruksi penulisan. Jadi hampir setiap aplikasi yang menggunakan LCD, R/W selalu diset ke 0 (nol). Jalur data dapat terdiri dari 4 atau 8 bit (tergantung mode yang dipilih oleh pengguna), mereka dinamakan DB0, DB1, DB2, DB3, DB4, DB5, DB6, dan DB7. Mengirim data secara parallel baik 4 atau 8 bit merupakan 2 mode operasi primer.
Untuk membuat sebuah aplikasi interface LCD, menentukan mode operasi merupakan hal yang paling penting. Mode 8 bit sangat baik digunakan ketika kecepatan menjadi keutamaan dalam sebuah aplikasi dan setidaknya minimal tersedia 11 pin I/O (3 pin untuk kontrol, 8 pin untuk data). Sedangkan mode 4 bit minimal hanya membutuhkan 7 bit (3 pin untuk kontrol, 4 pin untuk data). Aplikasi dengan LCD dapat dibuat dengan mudah dan waktu yang singkat, mengingat koneksi parallel yang cukup mudah antara kontroler dan LCD. (Setiawan, 2011)
2.6 Pompa Air
Pompa adalah suatu alat pengangkut untuk memindahkan zat cair dari suatu tempat ke tempat lain dengan memberikan gaya tekan terhadap zat yang akan dipindahkan, seperti misalnya pemindahan crude oil dati tangki penampungan
bahan baku yang akan dialirkan ke kolam Destilasi. Pada dasarnya gaya tekan yang diberikan untuk mengatasi friksi yang timbul karena mengalirnya cairan di dalam pipa saluran karena beda evevasi (ketinggian) dan adanya tekanan yang harus dilawan.
Perpindahan zat cair dapat terjadi menurut arah horizontal maupun vertikal seperti zat cair yang dipindahkan secara mendatar akan mendapatkan hambatan berupa gesekan dan turbulensi, sedangka pada zat cair dengan perpindahan ke arah vertikal, hambatan yang timbul terdiri dari hambatan-hambatan yang diakibatkan dengan adanya perbedaan tinggi antara permukaan isap (suction) dan permukaan tekan (discharge).
http://id.weirminerals.com/industries/mine_dewatering.aspx 2.7 Aerator
Aerator adalah alat untuk membantu melarutkan oksigen yang ada di udara ke dalam air kolam atau akuarium. Prinsip kerja alat ini adalah membuat permukaan air sebanyak mungkin bersentuhan degan udara. Tujuannya adalah agar kandungan oksigen dalam air itu cukup dan gas serta zat yang biasanya menimbulkan bau busuk dapat terusir dari air. Aerator ini membuat gelembung-gelembung di udara dalam air. Besar kecilnya gelembung-gelembung udara dapat diatur. Gelembung udara itu menyebabkan permukaan air yang bersentuhan dengan udara menjadi lebih luas. Waktu gelembung udara itu mengapung ke atas dana
pecah di permukaan, permukaan air bergoyang sehingga kapasitasnya untuk meyerap oksigen dari udara juga menjadi bertambah.
Gambar 2.10 Aerator
2.8 Solenoid Valve
distribusi, dose, dan release. Perlu anda ketahui bahwa solenoid valve memiliki berbagai macam jenis tergantung dari metode kerjanya dan penggunaanya. Namun, bila diamati dari modelnya, soleid valve terdiri dari dua jenis yaitu
solenoid valve double coil dan single coil walaupun kedua jenis ini memiliki cara
kerja yang sama.
Saat ini solenoid valve banyak diaplikasikan pada suatu proses tertentu, karena memiliki kelebihan seperti masa servis yang tergolong lama, sangat efisien, aman dan daya kontrol rendah. Dalam pengaplikasianya, solenoid valve terdiri dari beberapa variasi sesuai kegunaan mesin tersebut. Berikut ini adalah beberapa penggunaan solenoid valve:
1. Untuk menggerakkan piston valve 2. Untuk menggerakkan tabung silinder 3. Untuk menggerakkan blow set valve
Umumnya tegangan kerja pada solenoid valve berkisar 220 VAC, tapi ada juga jenis solenoid valve yang menggunakan tegangan kerja 12 VDC.
Solenoid adalah aktuator elektromagnetik yang paling sederhana yang
dapat digunakan pada aktuator linear atau rotati pada katup, saklar dana relay. Solenoid tersusun dari rangka besi stasioner (stator), gulungan kawat/koil (solenoid) dan pluger elektromagnetik (armature/angker dinamo) pada pusat
gulungan. (Bishop, 2008) Solenoid Valve adalah merupakan sebuah katup yang digerakkan oleh energi listrik, mempunyai kumparan sebagai penggeraknya yang berfungsi untuk menggerakkan plunger yang dapat digerakkan oleh arus AC maupun DC. (Mitsuhata, et al, 2011)
2.9 Kolam Budidaya Udang
Pada penelitian ini kolam yang digunakan adalah kolam miniatur yang berbentuk balok. Yang volumenya secara matematis dapat dihitung menggunakan rumus matematika pada persamaan 2.2 sebagai berikut
t l p
V (2.2)
Dimana :