TUGAS AKHIR
Oleh :
EKO PUGUH ARISTRA S P
0634010263
PROGRAM STUDI TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN”
J AWA TIMUR
TUGAS AKHIR
Diajukan Untuk Memenuhi Sebagai Persyaratan Dalam Memperoleh Gelar Sarjana Komputer
Program Studi Teknik Informatika
Oleh :
EKO PUGUH ARISTRA S P
0634010263
PROGRAM STUDI TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN”
J AWA TIMUR
MENGIDENTIFIKASI WARNA BENDA DENGAN
MENGGUNAKAN MIKROKONTROLER ATMEGA8515
Disusun oleh :
EKO PUGUH ARISTRA S P
0634010263
Telah disetujui mengikuti Ujian Negara Lisan Periode II Tahun Akademik 2012/2013
Pembimbing I
Basuki Rahmat, S.Si, MT. NPT. 3 6907 06 0209 1
Pembimbing II
Ir. Kartini, S.Kom, MT. NIP. 1961 1110 1991 03 2001
Mengetahui,
Ketua Program Studi Teknik Informatika Fakultas Teknologi Industri
Universitas Pembangunan Nasional ”Veteran” J awa Timur
MENGIDENTIFIKASI WARNA BENDA DENGAN
MENGGUNAKAN MIKROKONTROLER ATMEGA8515
Disusun Oleh :
EKO PUGUH ARISTRA S P
0634010263
Telah dipertahankan dan diter ima oleh Tim Penguji Skripsi Program Studi Teknik Informatika Fakultas Teknologi Industri
Universitas Pembangunan Nasional ”Veteran” J awa Timur Pada Tanggal 14 Desember 2012
Pembimbing :
NIP. 19600713 198703 1 001
2.
Ir. Kartini, S.Kom, MT. NIP. 1961 1110 1991 03 2001
2.
Bar r y Nuqoba, S.Kom, M.Kom. NIDN. 07 021 184 02
3.
Wahyu Saifullah J S, S.Kom, M.Kom. NPT. 3 8608 10 0295 1
Mengetahui,
Dekan Fakultas Teknologi Industri
Univer sitas Pembangunan Nasional ”Veteran” J awa Timur
Ucapan terima kasih ini peneliti persembahkan sebagai perwujudan rasa syukur atas terselesaikannya Laporan Skripsi. Ucapan terima kasih ini peneliti tujukan kepada:
1. Allah SWT., karena berkat Rahmat dan berkahNya kami dapat menyusun dan menyelesaikan Laporan Skripsi ini hingga selesai.
2. Bapak Prof. Dr. Ir. Teguh Soedarto, MP selaku Rektor Universitas Pembangunan Nasional “Veteran” Jawa Timur.
3. Bapak Sutiyono, MT selaku Dekan Fakultas Teknologi Industri UPN “Veteran” Jawa Timur.
4. Ibu Dr. Ir. Ni Ketut Sari, MT. selaku Ketua Jurusan Teknik Informatika UPN “Veteran” Jawa Timur yang telah dengan sabar membimbing dengan segala kerendahan hati dan selalu memberikan kemudahan dan kesempatan bagi saya untuk berkreasi.
5. Bapak Firza Prima Aditiawan, S.Kom., Selaku PIA Tugas Akhir Teknik Informatika UPN “Veteran” Jawa Timur.
6. Bapak Basuki Rahmat Ssi, MT, selaku dosen pembimbing utama pada Proyek Skripsi ini di UPN “Veteran” Jawa Timur yang telah banyak memberikan petunjuk, masukan, bimbingan, dorongan serta kritik yang bermanfaat sejak awal hingga terselesainya skripsi ini.
8. Keluarga tercinta, terutama Bapak Ibuku tersayang, terima kasih atas semua doa, dukungan serta harapan-harapannya pada saat penulis menyelesaikan Skripsi dan laporan ini. Yang penulis minta hanya doa restunya, sehingga penulis bisa membuat sesuatu yang lebih baik dari laporan ini.
Syukur Alhamdulillaahi rabbil ‘alamin terucap ke hadirat Allah SWT atas segala limpahan Kekuatan-Nya sehingga dengan segala keterbatasan waktu, tenaga, pikiran dan keberuntungan yang dimiliki peneliti, akhirnya peneliti dapat menyelesaikan Skripsi yang berjudul ”Robot Berbasis Kamera CMUCAM Untuk Mengidentifikasi Warna Benda Dengan Menggunakan Mikrokontroler Atmega8515” tepat waktu.
Skripsi dengan beban 4 SKS ini disusun guna diajukan sebagai salah satu syarat untuk menyelesaikan program Strata Satu (S1) pada jurusan Teknik Informatika, Fakultas Teknologi Industri, UPN ”VETERAN” Jawa Timur.
Melalui Skripsi ini peneliti merasa mendapatkan kesempatan emas untuk memperdalam ilmu pengetahuan yang diperoleh selama di bangku perkuliahan, terutama berkenaan tentang penerapan teknologi perangkat bergerak. Namun, peneliti menyadari bahwa Skripsi ini masih jauh dari sempurna. Oleh karena itu peneliti sangat mengharapkan saran dan kritik dari para pembaca untuk pengembangan aplikasi lebih lanjut.
Surabaya, November 2012
2.5 Servo ... 30
2.5.1 Jenis-jenis Motor Servo ... 33
2.5.2 Kegunaan Motor Servo ... 33
BAB III ANALISIS DAN PERANCANGAN SISTEM ... 35
3.1 Analisis Sistem ... 35
3.2 Perancangan Perangkat Lunak ... 36
Oleh : EKO PUGUH 0634010263/FTI/TF
ABSTRAK
Kemajuan teknologi yang semakin pesat terutama dalam bidang teknologi robotika telah memasuki berbagai segi kehidupan manusia mulai dari bidang otomatisasi industri, militer, intertainment maupun dalam bidang medis. Robot kamera untuk mengidentifikasi warna benda adalah salah satu bentuk implementasi teknologi dalam bidang robotika yang memiliki kemampuan menirukan salah satu atau beberapa kegiatan manusia seperti mencari warna benda dan sebagainya.
Sensor yang dibutuhkan untuk mewakili suatu indera manusia adalah kamera CMUCAM sehingga dibutuhkan suatu sistem kendali secara visual. Pada prinsipnya tujuan dari kendali visual pada robot kamera untuk mengidentifikasi warna benda ini diterapkan agar robot memiliki kecerdasan dalam mengenali objek berupa bola warna, pemrosesan gambar yang dilakukan yaitu mendeteksi objek menggunakan metode tracking colour yang mana merupakan metode mencocokkan warna yang sesuai dengan bentuk benda apapun serta menentukan titik tengah dari objek yang terdeteksi. Memakai cara tracking colour bisa menentukan jarak tangkap kamera CMUCAM untuk memperoleh objek tersebut.
BAB I
PENDAHULUAN
1.1 Latar Belakang
Teori operasi ini adalah bahwa kamera dapat mengunci objek benda dengan warna-warna yang cerah. Cara kerja mobile robot ini dengan mengambil nilai RGB dari benda yang sudah dilacak. Kemudian kamera memberi serial informasi gambar, seperti massa X, Y massa, dan pixel informasi. Ini dapat digunakan untuk mengendalikan gerak robot untuk menjaga objek berpusat di lensa kamera.
1.2 Rumusan Masalah
Berdasarkan latar belakang yang diuraikan diatas, maka perlu dirumuskan masalah, antara lain :
a. Bagaimana merancang dan membuat robot yang dapat mendeteksi benda dengan warna tertentu menggunakan CMUcam.
b. Bagaimana merancang dan membuat program untuk menjadi robot
yang dapat mendeteksi benda dengan warna tertentu menggunakan
CMUcam.
c. Bagaimana melakukan uji coba pengenalan benda yang sudah ditentukan.
1.3 Tujuan Penelitian
1.4 Manfaat Penelitian
Adanya Tugas Akhir ini diharapkan dapat bermanfaat, antara lain :
a. Mengetahui dan mempelajari cara kerja mobile robot kamera
CMUcam.
b. Mempermudah pihak pengguna mobile robot tersebut dalam pencarian objek.
c. Menambah pengetahuan tentang sistem maupun manfaat dari mikrokontroler ATMEL ATmega8515 agar dapat menggunakannya untuk aplikasi yang bermanfaat lainnya.
1.5 Batasan Masalah
Pada penelitian ini, memiliki suatu batasan masalah diantaranya :
a. Robot ini bergerak sesuai dengan objek/benda yang ditentukan.
b. Robot ini hanya dapat melakukan gerakan maju dan memutar kekiri.
c. Mikrokontroller yang digunakan adalah ATMEL ATmega8515.
d. Bahasa pemrograman yang digunakan pada mikrokontroller adalah bahasa C.
1.6 Metodologi Penelitian
a. Studi Literatur yang dipergunakan untuk mempelajari dasar teori yang berhubungan dengan topic pembahasan.
b. Perancangan dan Pembuatan Alat.
c. Analisa Peralatan.
d. Pengujian Alat.
e. Penulisan Hasil Ujian.
1.7 Sistematika Penulisan
Sistematika pembahasan penulisan tugas akhir ini tersusun atas :
BAB I : PENDAHULUAN
Bab ini menjelaskan tentang latar belakang, rumusan masalah, batasan masalah, tujuan, manfaat, metodologi penelitian dan sistematika penulisan.
BAB II : TINJ AUAN PUSTAKA
BAB III : ANALISIS DAN PERANCANGAN SISTEM
Bab ini berisi tentang analisa dan perancangan sistem dalam pembuatan Tugas Akhir robot berbasis kamera CMUcam untuk mengidentifikasi warna benda.
BAB IV : IMPLEMENTASI SISTEM
Bab ini berisi penjelasan hasil Tugas Akhir serta pembahasan tentang robot berbasis kamera CMUcam untuk mengidentifikasi warna benda.
BAB V : UJ ICOBA DAN EVALUASI SISTEM
Bab ini berisi pengujian program Tugas Akhir.
BAB VI : PENUTUP
Bab ini berisi kesimpulan dan saran-saran penulis mengenai Tugas Akhir yang disusun.
DAFTAR PUSTAKA
BAB II
TINJ AUAN PUSTAKA
Pada bab ini dibahas mengenai teori penunjang dari peralatan yang digunakan dalam sistem mikrokontroler ATMEL ATmega8515, kamera
CMUcam2, AVERLOGIC AL4408-12-PBF Memory, dan servo.
2.1 Gambaran Umum Mikr okontroler
Mikrokontroler merupakan suatu IC yang di dalamnya berisi CPU, ROM, RAM, dan I/O. Dengan adanya CPU tersebut maka mikrokontroler dapat melakukan proses berfikir berdasarkan program yang telah diberikan kepadanya. Mikrokontroler banyak terdapat pada peralatan elektronik yang serba otomatis, mesin fax, dan peralatan elektronik lainnya. Mikrokontroler dapat disebut pula sebagai komputer yang berukuran kecil yang berdaya rendah sehingga sebuah baterai dapat memberikan daya. Mikrokontroler terdiri dari beberapa bagian seperti yang terlihat pada gambar di bawah ini :
Pada gambar tersebut tampak suatu mikrokontroler standart yang tersusun atas komponen-komponen sebagai berikut :
A. Central Processing Unit (CPU)
CPU merupakan bagian utama dalam suatu mikrokontroler. CPU pada mikrokontroler ada yang berukuran 8 bit ada pula yang berukuran 16 bit. CPU ini akan membaca program yang tersimpan di dalam ROM dan melaksanakannya.
B. Read Only Memory (ROM)
ROM merupakan suatu memori (alat untuk mengingat) yang sifatnya hanya dibaca saja. Dengan demikian ROM tidak dapat ditulisi. Dalam dunia mikrokontroler ROM digunakan untuk menyimpan program bagi mikrokontroler tersebut. Program tersimpan dalm format biner (‘0’ atau ‘1’). Susunan bilangan biner tersebut bila telah terbaca oleh mikrokontroler akan memiliki arti tersendiri.
C. Random Acces Memory (RAM)
D. Input / Output (I/O)
Untuk berkomunikasi dengan dunia luar, maka mikrokontroler menggunakan terminal I/O (port I/O), yang digunakan untuk masukan atau keluaran.
E. Komponen lainnya
Beberapa mikrokontroler memiliki timer/counter, ADC (Analog to Digital Converter), dan komponen lainnya. Pemilihan komponen tambahan yang sesuai dengan tugas mikrokontroler akan sangat membantu perancangan sehingga dapat mempertahankan ukuran yang kecil. Apabila komponen-komponen tersebut belum ada pada suatu mikrokontroler, umumnya komponen tersebut masih dapat ditambahkan pada sistem mikrokontroler melalui port-portnya.
2.2 Mikrokontroler ATMEL ATmega8515
Mikrokontroler ATMEL ATmega8515 adalah suatu kombinasi mikroprosesor, piranti I/O (Input/Output), dan memori, yang terdiri atas ROM (Read Only Memory) dan RAM (Random Access Memory), dalam bentuk keping tunggal (single chip).
Mikrokontroler ATMEL ATmega8515 memiliki karakteristik sebagai berikut :
a. Kompatibel dengan produk keluarga MCS51.
b. Dapat digunakan bahasa C sebagai bahasa pemogramannya. c. Programmable Flash Memory sebesar 8 KByte.
d. Memiliki 512 Byte EEPROM yang dapat diprogram. e. Ketahanan (endurance) : 10.000 siklus tulis/hapus. f. Jangkauan operasi : 4,5 – 5,5 Volt.
g. Fully Static Operation : 0 Hz – 16 MHz untuk ATmega8515. h. Dua level Program Memory Lock yaitu flash program dan
EEPROM data security. i. RAM Internal 128 X 8 bit.
j. Memiliki 32 jalur I/O yang dapat diprogram. k. Satu pencacah 8 bit dengan sparate prescaler. l. Satu pencacah 16 bit dengan sparate prescaler.
m. Sumber interupsi (interrupt source) eksternal dan internal.
n. Kanal pengirim-penerima tak serempak universal
(UART-Universal Asynchronous Receiver Transmitter) yang dapat diprogram.
o. Low-power Idle dan Power-down Mode.
2.2.1 Blok Diagram dan Ar sitektur Mikrokontroler ATmega8515
Mikrokontroler ATmega8515 ini mempunyai 32 general purpose register
sehingga register dapat diakses dan dieksekusi hanya dalam waktu satu siklus
clock. ALU merupakan tempat dilakukannya operasi fungsi aritmetik, logika dan operasi bit. R30 disebut juga sebagai Z-Register, yang digunakan sebagai register penunjuk pada pengalamatan tak langsung. Didalam ALU terjadi operasi aritmetik dan logika antar register, antara register dan suatu konstanta, maupun operasi untuk register tunggal (single register). Berikut arsitekturnya yang ditunjukkan blok diagram pada Gambar 2.2.
Bentuk kemasan dan susunan kaki-kaki mikrokontroler ATmega8515 diperlihatkan seperti pada Gambar 2.3. pada penggunakan clock eksternal, pin yang digunakan ialah pin T1. Pin T1 berada pada port B1.
Gambar 2.3 Susunan kaki pada Mikrokontroler ATmega8515
Berikut penjelasan dari PORT A/B/C/D/E, DDR A/B/C/D/E, dan PIN A/B/C/D/E:
Tabel 2.1 Kombinasi Bit DDRn dan PORTn
DDRBn/Dn PORTBn/Dn I/O Keterangan
0 0 Input Tri-state (High-Z)
0 1 Input
PORTA/B/C/D/En akan menghasilkan arus jika
eksternal pull-low
1 0 Output Push-pull zero output
1 1 Output Push-pull one output
2.2.2 Pencacah/Pewaktu/Clock
Pencacah pada ATmega8515 diatur oleh register TCCR1B (Timer/Counter1 Control Register B). register TCCR1B dijelaskan pada Gambar 2.4.
Gambar 2.4 Register TCCR1B
Bit yang digunakan untuk penghitung frekuensi dari sumber eksternal adalah bit 2:0 CS12, CS11, CS10: Clock Select 1, Bits 2, 1 dan 0. Kombinasi dari
Tabel 2.2 Clock 1 Prescale Select CS12 CS11 CS10 Deskripsi
0 0 0 Stop, Timer/Counter1 dihentikan 0 0 1 CK
0 1 0 CK/8 0 1 1 CK/64 1 0 0 CK/256 1 0 1 CK/1024
1 1 0 Kaki Eksternal T1, tepian jatuh 1 1 1 Kaki Eksternal T1, tepian naik
Register TCNT1 merupakan register yang berisi data 16-bit hasil perhitungan pencacah. Register ini memiliki fungsi akses langsung, baik untuk operasi menulis atau membaca data. Register TCNT1 terbagi atas 2 register 8-bit, yaitu TCNT1H dan TCNT1L seperti pada gambar 2.5.
Gambar 2.5 Register TCNT1
2.3 Sensor
pengukuran dan pengaturan secara elektronik berfungsi menubah besaran fisik (misalnya : temperature, gaya, kecepatan putaran) menjadi besaran listrik yang proporsional. Salah satu sensor yang digunakan daam pembuatan tugas akhir ini adalah sensor kamera. Penjelasan dari sensor kamera terdapat di bawah ini.
2.3.1 Kamera CMUcam2
CMUcam2 adalah sebuah sensor visual yang mampu melakukan pengolahan suatu citra digital. Dengan menggunakan vision sensor ini maka dapat dengan mudah melakukan beberapa hal seperti penjejak objek dan lain sebagainya. Bentuk fisik dari CMUcam2 itu sendiri akan diperlihatkan seperti Gambar 2.6.
Gambar 2.7 Papan rangkaian CMUcam2
Pada papan rangkaian CMUcam yang telah diperlihatkan pada Gambar 2.7, terdapat berbagai koneksi perangkat keras tersebut. Koneksi perangkat keras tersebut terdiri dari :
A. Power
Internal" jumper dan cabut servo eksternal. Papan rangkaian power connector akan diperlihatkan pada Gambar 2.8.
Peringatan: powering servo dari daya internal berarti, bahwa jika servo membutuhkan daya yang lebih saat ini daripada yang tersedia untuk daya servo dan prosesor, maka prosesor akan reset atau gagal untuk beroperasi sama sekali. Menjalankan tiga atau lebih servo akan mati dari daya internal dan kemungkinan besar tidak berhasil.
Gambar 2.8 Papan Rangkaian Power Connector
B. Serial Port
dengan mikrokontroler. Tingkat bergesernya port serial hanya menggunakan 3 dari 10 pin. Hal ini dalam konfigurasi 2x5 pin yang sesuai klip pada kabel 9 pin standar pita soket seri dan 10 pin klip perempuan pada header serial yang dapat baik melampirkan ke kabel pita 10 kawat. jika ini awalnya tidak berhasil, cobalah membalik arah bahwa kabel pita terhubung ke CMUcam2 yang ada pada papan rangkaian.
Pastikan jumper serial di tempat saat anda menggunakan mode ini. TTL konektor dapat digunakan untuk berbicara dengan mikrokontroller tanpa penggunaan chip tingkat pergeseran. TTL pin output antara 0 dan 3.3volts, tetapi 5 volt toleran untuk input. Lepaskan Jumper Serial saat anda menggunakan mode ini. Papan rangkaian serial port akan diperlihatkan pada Gambar 2.9.
C. Camera Bus
Ini antarmuka bus dengan chip kamera CMOS. CMOS kamera yang terdapat pada papan rangkaian dipasang paralel ke bagian pengolahan papan rangkaian dan menghubungkan mulai dari pin 1. Header perempuan kamera harus disolder di bagian belakang papan rangaian CMUcam2 utama. CMUcam2 saat ini bekerja dengan OV6620 dan OV7630 modul kamera. Papan rangkaian camera bus akan diperlihatkan pada Gambar 2.10.
Gambar 2.10 Papan Rangkaian Camera Bus Connector
D. Servo Port
sebagai output tujuan umum digital. Papan rangkaian servo port diperlihatkan pada Gambar 2.11.
Gambar 2.11 Papan Rangkaian Servo Port Connector
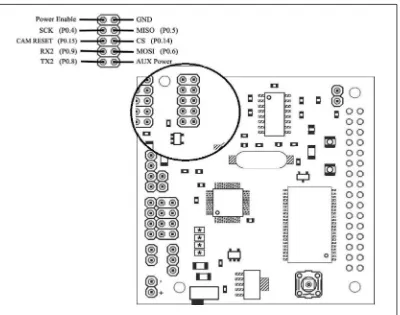
E. Expansion Port GPIO
Tujuan umum I / O header yang memungkinkan akses ke UART kedua, kekuasaan pin berbagai kontrol dan pin SPI. Daya Aktif - Ketika ditarik rendah, regulator CMUcam2 utama non-aktif menyebabkan papan rangkaian untuk menarik kurang dari 0.01uA. Semua perangkat penutup dan kehilangan semua informasi keadaan aktif. Ketika garis dilepaskan atau ditarik tinggi, papan rangkaian akan reboot. Secara default, pin secara internal menarik tinggi.
menghapus resistor R11 dan menambahkan resistor jumper di tempat R6, pin terhubung ke utama daya sebelum regulator 5 volt.
CAM RESET - pin ini dapat digunakan sebagai eksternal I / O jika kamera state tidak diperlukan. Biasanya pin ini akan mereset modul kamera dan tidak harus digunakan.
TX2 – Pin pancar pada UART2 tidak tingkat bergeser dan karenanya tidak dapat langsung dihubungkan ke PC atau tidak ada perangkat TTL eksternal. Pin ini juga dapat digunakan sebagai GPIO.
RX2 – Yang menerima pin pada UART2 tidak tingkat bergeser dan karenanya tidak dapat langsung dihubungkan ke PC atau tidak ada perangkat TTL eksternal. Pin ini juga dapat digunakan sebagai GPIO.
CS – Pada reboot, jika pin ini dianggap rendah, LPC2106 akan memasuki mode bootstrap. Reboot dapat eksternal yang disebabkan oleh berdenyut daya mengaktifkan pin. Biasanya pin ini akan dikendalikan oleh MMC driver. Pin ini juga dapat digunakan sebagai GPIO atau sebagai chip SPI bila pilihan kartu MMC tidak dimasukkan.
SCK – Biasanya pin ini dikontrol oleh driver MMC. Pin ini juga dapat digunakan sebagai GPIO atau sebagai pin jam SPI bila kartu MMC tidak dimasukkan. Papan rangkaian expansion port GPIO diperlihatkan pada Gambar 2.12.
Gambar 2.12 Papan Rangkaian Expansion Port GPIO Connector
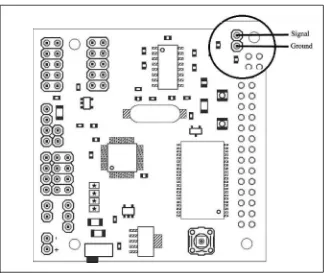
F. Analog Output Port
kamera pada frame rate maksimum (default) dan beralih ke mode YCrCb untuk melihat gambar pada monitor. Papan rangkaian analog output port akan diperlihatkan pada Gambar 2.13.
Gambar 2.13 Papan Rangkaian Analog Output Port Connection
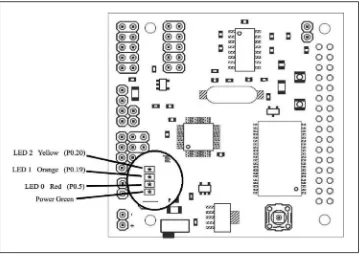
G. LEDs
LED 0 - Pin ini digunakan bersama-sama dengan pin Mosi dan harus digunakan hanya ketika CS dinonaktifkan saat kartu MMC dimasukkan.
Gambar 2.14 Papan Rangkaian LEDs Connector
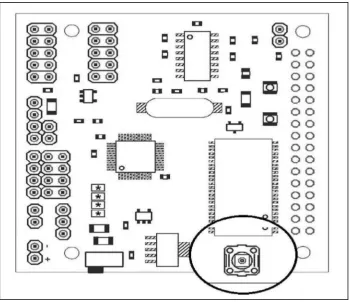
H. ISP Button
Ketika ditekan pada saat power up, tombol ISP akan memungkinkan dibangun di LPC2106 bootloader. Setelah prosesor telah dimulai, tombol dapat dibaca sebagai GPIO normal. Hal ini secara internal ditarik tinggi, dan ditetapkan rendah ketika tertekan.
Gambar 2.15 Papan Rangkaian ISP Button
Sensor diatas adalah sensor yang akan digunakan dalam melakukan
tracking colour untuk mengetahui keberadaan objek dan mendefinisikannya menjadi suatu posisi-posisi dalam bidang tangkapan kamera.
2.4 AVERLOGIC AL4408-12-PBF Memory
diperpanjang (menulis mask, membaca skip.. dll), yang memungkingkan pengoperasian mudah non-linearitas dan regional membaca / menulis FIFO untuk PIP, TV digital, system keamanan dan aplikasi kamera video.
Pengembangan AL4408-12-PBF lebar bus data adalah dengan menggunakan beberapa AL4408-12-PBF sinyal kontrol yang dipilih. Membaca dan menulis sinyal kontrol, seperti Read/Write aktif, Input/Output aktif.., dan dapat dilakukan secara aktif rendah atau tinggi dengan cara menarik sinyal PLRTY ke tinggi atau yang rendah masing-masing.
Tersedia dalam bentuk 44-pin TSOP (II), jejak yang kecil memungkinkan desainer produk untuk menjaga bentuk tetap minimum.
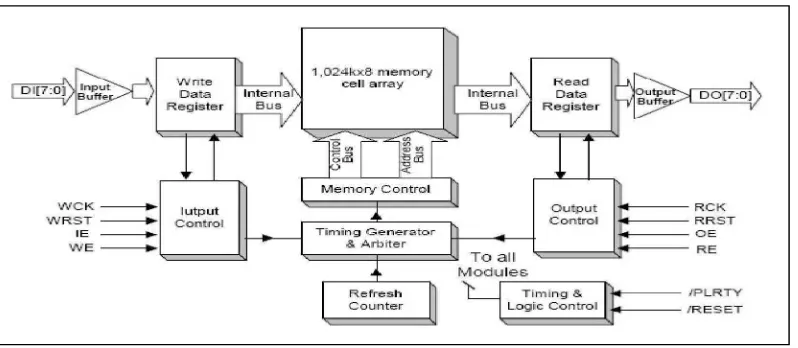
2.4.1 Block Diagram dan Arsitektur AVERLOGIC AL4408-12-PBF
Struktur internal dari AL4408-12-PBF terdiri dari Input/Output buffer, tulis Register Data, baca Register Data dan utama 1.024k x 8 array sel memori n state of-the-art desain logika yang menangani dan mengendalikan, membaca/menulis data. Berikut arsitekturnya yang ditunjukan pada block diagram pada Gambar 2.16.
Bentuk kemasan dan susunan kaki-kaki AVERLOGIC AL4408-12-PBF diperlihatkan seperti pada Gambar 2.17.
Gambar 2.17 Arsitektur AVERLOGIC AL4408-12-PBF
Berikut penjelasan dari masing-masing pin dan port :
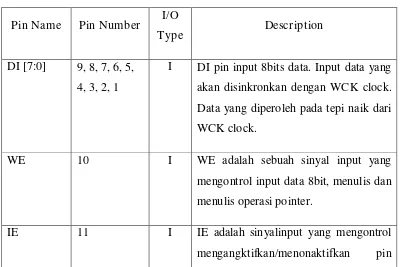
A. Write Bus Signals
Pada saat write bus signals terdapat susunan pin dan port yang mempunyai fungsi yang akan dijelaskan lebih lanjut pada Tabel 2.3.
Tabel 2.3 Write Bus Signals
Pin Name Pin Number I/O
Type Description DI [7:0] 9, 8, 7, 6, 5,
4, 3, 2, 1
I DI pin input 8bits data. Input data yang akan disinkronkan dengan WCK clock. Data yang diperoleh pada tepi naik dari WCK clock.
WE 10 I WE adalah sebuah sinyal input yang mengontrol input data 8bit, menulis dan menulis operasi pointer.
Pin Name Pin Number I/O
Type Description DI [7:0] 9, 8, 7, 6, 5,
4, 3, 2, 1
I DI pin input 8bits data. Input data yang akan disinkronkan dengan WCK clock. Data yang diperoleh pada tepi naik dari WCK clock.
WE 10 I WE adalah sebuah sinyal input yang mengontrol input data 8bit, menulis dan menulis operasi pointer.
input data 8bit. Pointer menulis alamat internal yang selalu bertambah di saat kenaikan WCK dengan memungkinkan WE terlepas dari tingkat IE.
WCK 13 I WCK adalah jam menulis pin input. Input menulis data yang akan disinkronkan dengan clock ini.
WRST 14 I WRST adalah sinyal input yang mengulang alamat pointer kembali ke 0.
*Catatan: Untuk definisi polaritas, semua sinyal kontrol menulis (WE, IE dan WRST), lihat definisi pin /PLRTY dan “Memori Operasi” untuk rincian.
B. Read Bus Signals
Tabe 2.4 Read Bus Signals kenaikan RCK dengan memungkinkan RE terlepas dari tingkat OE.
RCK 32 I RCK adalah clock pin untuk membaca masukan. Output data baca disinkronisasikan dengan clock ini. RRST 31 I RRST adalah sinyal input yang
mengulang-ngulang pointer untuk membaca alamat ke 0.
C. Power/Ground Signals
Pada power/ground signals juga terdapat susunan pin dan port yang mempunyai fungsi yang akan dijelaskan lebih lanjut pada Tabel 2.5.
Tabel 2.5 Power/Ground Signals
Pin Name Pin Number I/O mempunyai fungsi yang akan dijelaskan lebih lanjut pada Tabel 2.6.
Tabel 2.6 Miscellaneous Signals
Pin Name Pin Number I/O
Type Description
Pin Name Pin Number I/O
/PLRTY = GND, aktif tinggi.
Catatan: Selama operasi memori, pin harus permanen atau terhubung ke GND. Pin memiliki internal pull-tinggi serendah standar aktif, jika /PLRTY memiliki koneksi tidak ada. Jika tingkat /PLRTY diubah selama operasi memori, data memori tidak dijamin.
batas sudut dari putaran servo. Bentuk motor servo diperlihatkan pada gambar 2.18.
Gambar 2.18 Motor Servo
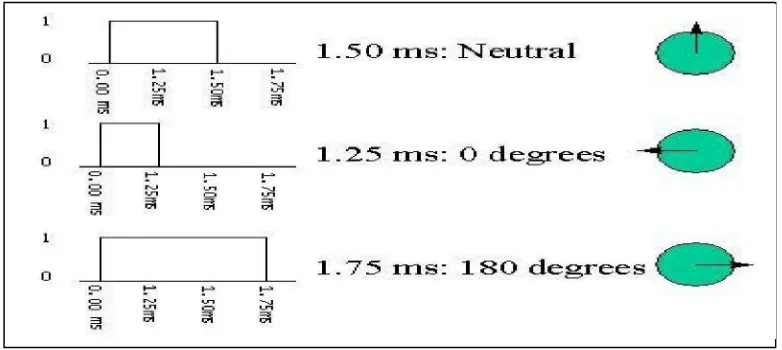
Gambar 2.19 Pulse Servo
Motor servo biasanya hanya bergerak mencapai sudut tertentu saja dan tidak kontinyu seperti motor DC maupun motor stepper. Walau demikian, untuk beberapa keperluan tertentu, motor servo dapat dimodifikasi agar bergerak kontinyu. Pada robot, motor ini sering digunakan untuk bagian kaki, lengan atau bagian-bagian lain yang mempunyai gerakan terbatas dan membutuhkan torsi cukup besar.
Motor servo adalah motor yang berputar lambat, dimana biasanya ditunjukkan oleh rate putarannya yang lambat, namun demikian memiliki torsi yang kuat karena internal gearnya.
Lebih dalam dapat digambarkan bahwa sebuah motor servo memiliki :
a. 3 jalur kabel : power, ground dan control.
c. Operasional dari servo motor dikendalikan oleh sebuah pulse selebar ± 20 mS, dimana lebar pulse antara 0.5 mS dan 2 mS menyatakan akhir dari range sudut maksimum.
d. Konstruksi di dalamnya meliputi internal gear, potensiometer, dan feedback control.
2.5.1 J enis-jenis Motor Servo
a. Motor servo standart 180°
Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut dari kanan – tengah – kiri adalah 180°.
b. Motor servo continuous
Motor servo jenis ini mampu bergerak dua arah (CW dan CCW) tanpa batasan defleksi sudut putar (dapat berputar secara kontinyu).
2.5.2 Kegunaan Motor Servo
a. Manipulators.
b. Moving camera’s.
c. Robot arm.
ANALISIS DAN PERANCANGAN SISTEM
Pada BAB III ini akan dibahas analisis dan perancangan sistem baik pada perancangan robot, perangkat keras (hardware) dan perangkat lunak (software). Perancangan perangkat keras (hardware) meliputi :
a. Rangkaian mikrokontroler ATMEGA8515.
b. Driver motor servo.
c. Servo.
d. Rangkaian CMUcam.
e. USB Downloader.
Untuk perancangan perangkat lunak meliputi jalannya Program AVR berbasis bahasa C yang dimasukkan ke mikrokontroler ATMEGA 8515 untuk mengaktifkan kamera CMUcam dan roda yang terpasang di servo.
3.1 Analisis Sistem
Pada pembuatan robot ini peneliti memperhatikan beberapa aspek yang dibutuhkan, yaitu :
a. Robot ini dirancang dengan menggunakan kamera CMUCAM sebagai pendeteksi benda yang disesuaikan.
c. Robot ini menggunakan bahasa C sebagai bahasa pemrograman.
d. Robot ini dirancang untuk dapat berjalan secara otomatis jika benda yang sudah disediakan dengan kemampuan program yang telah diinputkan di dalam robot tersebut.
e. Robot ini dirancang untuk mendeteksi warna benda yang sudah disediakan dengan menggunakan kamera CMUCAM. Jika sudah mendeteksi benda yang dimaksud, maka secara otomatis robot akan mendekati benda yang sudah dideteksi warnanya tersebut.
3.2 Perancangan Perangkat Lunak
Setelah pembuatan perangkat keras selesai, bagian yang paling penting dalam pembuatan tugas akhir ini yaitu dalam merancang suatu perangkat lunak. Pada tugas akhir ini, perancangan perangkat lunak dibagi menjadi 2 bagian yaitu :
a. Perancangan perangkat lunak untuk PC.
b. Perancangan perangkat lunak untuk mikrokontroler.
3.2.1 Perancangan Perangkat Lunak Untuk PC
a) Orcad Family Release 9.2 dan Express PCB
Orcad sebagai program yang digunakan untuk merancang rangkaian elektronika dan Express PCB digunakan sebagai program untuk membuat gambar dan rangkaian pada PCB.
b) Program AVR Studio 4 dan program downloader LPC210x ISP
Program AVR Studio 4 dan program downloader LPC210x ISP adalah program compiler berbasis windows untuk mikrokontroler keluarga ATMEL khususnya tipe ATMEGA. Pemrograman pada mikrokontroler ATMEGA8515 menggunakan bahasa pemrograman C. Fungsi dari program AVR Studio 4 adalah untuk men-load file berekstensi “.c” yang sudah dibuat dengan menggunakan Notepad untuk dirubah menjadi file berekstensi “.hex”. setelah file dirubah menjadi “.hex” kemudian di-load dengan menggunakan program downloader LPC210x ISP. Tujuannya adalah untuk memasukkan program mikro ke dalam downloader mikrokontroleer ATMEGA8515.
3.2.2 Diagram Alir Pemrogr aman
Gambar 3.1 Diagram Alir Perancangan Sistem
Penjelasan diagram alir perancangan sistem :
a) Awal alur program.
e) Setelah memasukkan inputan ketiga warna, kemudian tunggu jawaban dari Cmucam. Jika sudah selesai, maka ketiga inputan warna yang sudah dijelaskan diatas akan mendapatkan nilai confidence hasil
tracking warna tersebut.
f) Setelah hasil nilai confidence didapat dan jika nilai confidence > 200, maka tracking warna tersebut sudah benar, dan robot akan menjalankan motor bahwa robot dalam keadaan standby dan kamera cmucam dalam posisi siap untuk tracking.
g) Setelah semua itu selesai maka akan dilakukan initialisasi port I/O, initialisasi port mikrokontroler, dan peresetan pada Cmucam.
h) Setelah port-port sudah di initialisasikan, kemudian penyesuaian kondisi cahaya disekitar kamera cmucam.
i) Jika penyesuaian kondisi cahaya kamera cmucam sudah, maka port I/O akan diaktifkan penanda robot siap untuk tracking warna.
j) Selanjutnya adalah pemilihan tombol switch warna merah, hijau, biru, dan stop untuk inputan robot tersebut melakukan pencarian bola / benda.
k) Jika memilih warna benda merah maka akan menjalankan perintah program untuk mencari warna benda merah. Jika tidak memilih inputan warna benda sama sekali bisa kembali ke pengaturan/pilihan warna benda atau selesai.
warna benda sama sekali bisa kembali ke pengaturan/pilihan warna benda atau selesai.
m) Jika memilih warna benda biru maka akan menjalankan perintah program untuk mencari warna benda biru. Jika tidak memilih inputan warna benda sama sekali bisa kembali ke pengaturan/pilihan warna benda atau selesai.
n) Jika pilihan warna benda merah maka robot mulai mencari terlebih dahulu letak keberadaan benda yang disediakan dengan memutar secara berlawanan arah jarum jam, jika robot telah menemukan benda yang telah disediakan robot akan maju mendekati benda yang telah disediakan yaitu benda yang berwarna merah.
o) Jika pilihan warna benda hijau maka robot mulai mencari terlebih dahulu letak keberadaan benda yang disediakan dengan memutar secara berlawanan arah jarum jam, jika robot telah menemukan benda yang telah disediakan robot akan maju mendekati benda yang telah disediakan yaitu benda yang berwarna hijau.
p) Jika pilihan warna benda biru maka robot mulai mencari terlebih dahulu letak keberadaan benda yang disediakan dengan memutar secara berlawanan arah jarum jam, jika robot telah menemukan benda yang telah disediakan robot akan maju mendekati benda yang telah disediakan yaitu benda yang berwarna biru.
beda dari inputan warna benda merah, hijau atau biru dalam artian jika inputan warna benda merah dan benda yang disediakan bukan warna merah maka robot tersebut akan terus mencari sampai cocok dengan inputan warna benda merah. Begitu juga dengan inputan warna benda yang lainnya.
r) Selesai dan kembali ke pemanggilan program utama.
3.3 Perancangan Perangkat Elektronik
Diagram blok di bawah ini merupakan gambaran secara garis besar dari jalannya sistem yang dibuat dalam tugas akhir ini. Diagram blok dapat dilihat pada gambar 3.2.
Gambar 3.2 Blok Diagram jalan garis besar sistem mikrokontroler
mikrokontroler akan bekerja sebagaimana fungsinya jika mendapatkan benda yang telah ditentukan. Yaitu, apabila sistem minimum mendapatkan masukan dari kamera CMUcam yang menandakan bahwa benda yang ditentukan sudah tertangkap maka sistem akan menghidupkan motor servo yang kemudian bergerak menghampiri benda yang telah ditentukan tersebut.
3.4 Rangkaian Mikrokontroler ATMEGA8515
Rangkaian mikrokontroler berfungsi untuk mengolah sinyal yang dikirimkan oleh beberapa sensor kamera kemudian diolah. Pemeriksaan sensor kamera serta pengaturan pergerakan motor yang diinginkan sehingga robot dapat bergerak sesuai dengan pembacaan sensor kamera agar robot dapat berjalan menghampiri benda yang telah ditentukan. Gambar rangkaian mikrokontroler ATMEGA8515 ditunjukkan pada gambar 3.3.
Mikrokontroler ini menggunakan arsitektur Harvard yang memisahkan memori program dari memori data, baik bus alamat maupun bus data, sehingga pengaksesan program dan data dapat dilakukan secara bersamaan (concurrent).
Secara garis besar mikrokontroler ATMEGA8515 terdiri dari :
a. Programmable Flash Memory sebesar 8 Kbyte.
b. Memiliki 512 Byte EEPROM yang dapat diprogram.
c. Ketahanan (endurance) : 10.000 siklus tulis/hapus.
d. Jangkauan operasi : 4,5 – 5,5 Volt.
e. Fully Static Operation : 0 Hz – 16 MHz.
f. Dua level Program Memory Lock yaitu flash program dan EEPROM data security.
g. RAM Internal 128 X 8 bit.
h. Memiliki 32 jalur I/O yang dapat diprogram.
i. Satu pencacah 8 bit dengan sparate prescaler.
j. Satu pencacah 16 bit dengan sparate prescaler.
k. Sumber interupsi (interrupt source) eksternal dan internal.
l. Low-power Idle dan Power-down Mode.
3.5 Driver Motor Servo
Untuk mengendalikan perputaran servo dibutuhkan sebuah driver. Driver
ini berfungsi untuk memutar servo searah/berlawanan arah dengan arah jarum jam. Mikrokontroler tidak dapat langsung mengendalikan putaran dari servo, karena itu dibutuhkan driver sebagai perantara antara mikrokontroler dan servo. Sehingga perputaran dari servo dapat dikendalikan oleh mikrokontroler. Rangkaian jembatan H ditunjukan pada gambar 3.4.
Gambar 3.4 Skema Rangkaian Driver Motor Servo
Gambar 3.4 merupakan rangkaian tegangan sebelum masuk kedalam
langsung terisi penuh, akan tetapi membutuhkan waktu untuk mencapai muatan listrik pada transistor tersebut penuh.
Setelah muatan listrik penuh tegangan dilepas maka muatan listrik pada transistor tidak akan langsung kosong akan tetapi membutuhkan waktu untuk mencapai muatan listrik pada transistor kosong. Tujuan dari pengggunaan rangkaian resistor dan transistor ini adalah menjaga tegangan yang masuk ke
driver servo cenderung stabil, karena tegangan akan ditampung terlebih dahulu di dalam transistor sebelum masuk ke driver servo sehingga robot dapat dikendalikan dengan baik.
3.6 Servo
Servo sebagai penggerak robot yang dapat bergerak maju mundur ata bergerak kanan kiri, pada robot iini menggunakan dua penggerak servo yang terpasang pada ke dua sisi bagian robot, yaitu pada bagian kiri, dan pada bagian kanan. Dimana servo pada roda kiri dan kanan bertujuan bergerak maju dan mundur. Rangkaian motor servo ditunjukan pada gambar 3.5.
3.7 Rangkaian CMUcam
Sebagai penentu robot berjalan secara otomatis penulis menggunakan kamera CMUcam yang merupakan bagian dari sensor visual untuk merubah citra digital menjadi besaran listrik. Rangkaian ini terdiri dari kamera yang terhubung secara optik dengan Averlogic AL4408-12-PBF Memory.
Gambar rangkaian CMUcam ditunjukkan pada gambar 3.6.
Gambar 3.6 Skema Rangkaian CMUcam
Pada saat CMUcam mendapat warna benda yang ditentukan maka
CMUcam akan mengirimkan data ke mikrokontroler, sedangkan apabila CMUcam
tidak mendapatkan warna benda yang ditentukan maka CMUcam tidak akan mengimkan data ke mikrokontroler.
3.8 Perancangan Miniatur Robot
Robot ini terdiri dari plat alumunium yang berguna untuk menjadi badan robot ini dan berguna untuk menahan baterai pack dan rangkaian elektonikanya. Tempat rangkaian elektronika seperti mikrokontroler, driver motor servo, kamera
CMUcam, dan baterai pack terletak pada atas plat alumunium ini atau dibagian badan robot ini. Bagian kameranya terdapat pada atas badan robot ini atau lebih tepatnya di atas plat alumunium dengan plat acrilyic bening berdiri untuk memudahkan kamera tersebut menangkap benda yang telah ditentukan.
Bentuk badan (model) atau body robot ini akan ditunjukan pada 3.7.
Pada robot ini juga terdapat dua roda dan dua motor servo yang berada dibagian samping depan kanan dan kiri, dan dibagian belakang bawah robot terdapat satu roda bebas untuk mengontrol robot berjalan kesemua arah.
IMPLEMENTASI
Pada bab ini akan membahas tentang implementasi program dari hasil analisis dan perancangan sistem yang ada pada bab III, serta bagaimana cara
sistem tersebut dijalankan.
4.1 Alat yang Digunakan
Pada implementasi program, alat-alat yang digunakan yaitu perangkat keras (hardware) dan perangkat lunak (software) yang dijabarkan sebagai berikut:
A. Perangkat Keras
Perangkat keras (hardware) yang digunakan adalah : a) Rangkaian minimum ATMEGA8515.
b) Miniatur Robot. c) Kamera CMUcam. d) Servo.
e) Lampu LED. f) Baterai pack 12 V. B. Perangkat Lunak
Perangkat lunak (software) yang digunakan adalah : a) Windows XP Service Pack 3.
4.2 Pr osedur Pembuatan Program
Ada beberapa cara yang harus di lakukan sebelum program di buat dan di masukkan ke dalam chip robot, yaitu :
a. Install terlebih dahulu aplikasi AVR Studio Version 4 pada komputer. b. Setelah selesai menginstall pilih project untuk membuat project baru,
kemudian pilih new project. Untuk implementasi akan ditunjukan pada gambar 4.1.
Gambar 4.1 Membuat Project Baru
Gambar 4.2 Mengisi Nama Project
d. Setelah memilih type, mengisi nama project, dan menentukan lokasi penyimpanan project ini. Akan keluar tabel baru select debug platform and device. Kemudian pilih debug platform dan device, disini penulis memilih debug platformnya AVR Simulator dengan device ATmega 8515. Untuk implementasinya akan ditunjukkan pada gambar 4.3.
e. Setelah itu klik finish adalah pembuatan program yang akan dimasukkan kedalam chip. Untuk implementasinya ditunjukkan pada gambar 4.4.
Gambar 4.4 Program Utama
f. Setelah program dibuat, terlebih dahulu kita compile agar kita dapat mengetahui adakah program yang error, untuk penjelasan bias dilihat pada gambar 4.5.
g. Setelah melakukan pengecekan, maka kita dapat mengetahui apakah program yang kita buat terdapat error atau tidak. Apabila dalam program terdapat kesalahan maka akan muncul tampilan error.
h. Jika dalam program tidak terdapat kesalahan atau error maka kita dapat mendapatkan “.hex” di folder default dimana kita menyimpan project tersebut dan kemudian di download ke mikrokontroler.
4.3 Implementasi Coding
Pada tahap ini akan dibahas mengenai program yang telah dibuat untuk mikrokontroler tersebut. Berikut penjelasan beserta program yang telah dibuat. Langkah pertama yang harus dilakukan adalah mendeklarasi semua fungsi, library, dan delay perintah ke perintah yang lain dari program yang akan kita susun. Berikut adalah potongan program yang merupakan penentuan fungsi pada mikrokontroler dalam pembacaan perintah sebelum masuk ke perintah utama.
#include<avr/io.h>
#include<util/delay.h> deklarasi fungsi, delay dan library
#include"softuart.h"
Setelah proses deklarasi library dan fungsi yang di tentukan dalam mikrokontroler selesai, langkah selanjutnya adalah membuat program untuk
void track_merah(void) {
//beri perintah untuk tracking dengan parameter TC [Rmin Rmax Gmin Gmax Bmin Bmax]
softuart_puts_progmem2(PSTR("TC 70 200 0 60 0 60\r")); //tunggu jawaban dari cmucam
while(SerialIn()!='T'); while(PINC&(1<<3)) {
//buang data yang tidak perlu for(i=0;i<8;i++)
}
else PORTB=0x01;
//beri perintah untuk mengakhiri tracking warna softuart_puts_progmem2(PSTR("TC\r")); while(SerialIn()!='T');
} }
Potongan program dibawah ini adalah inisialisasi port yang berfungsi untuk memastikan kestabilan power supply cmucam kepada mikrokontroler dan kemudian menyesuaikan kondisi cahaya sekitar cmucam, yang berguna disaat pencarian warna bola tidak dipengaruhi lagi oleh fungsi penyesuaian cahaya.
int main(void)
//Tunggu selama 3 detik untuk memastikan kestabilan power supply cmucam
_delay_ms(3000);
//inisialisasi port serial pada mikrokontroler softuart_init();
//beri perintah reset pada cmucam
softuart_puts_progmem2(PSTR("RS\r")); //tunggu sampai cmucam selesai reset
while(SerialIn()!=':');
//perintah ini digunakan untuk penyesuaian kondisi cahaya sekitar cmucam
softuart_puts_progmem2(PSTR("CR 18 44 19 33\r")); while(SerialIn()!=':');
//tunggu selama 8 detik untuk melakukan penyesuaian cahaya _delay_ms(8000);
//beri perintah untuk mematikan white balance dan auto exposure //hal ini berguna pada saat pencarian warna bola tidak dipengaruhi lagi oleh fungsi penyesuain kondisi cahaya
softuart_puts_progmem2(PSTR("CR 18 40 19 32\r")); while(SerialIn()!=':');
Dibawah ini adalah potongan program fungsi pencari warna bola dengan switch yang digunakan sebagai pilihan pencari.
{
if(!(PINC&(1<<0))) //jika tombol cari merah ditekan {
track_merah(); //cari bola warna merah PORTB=0x0F;
}
if(!(PINC&(1<<1))) //jika tombol cari hijau ditekan {
track_hijau(); // cari bola warna hijau PORTB=0x0F;
}
if(!(PINC&(1<<2))) //jika tombol cari biru ditekan {
track_biru(); //cari bola warna biru PORTB=0x0F;
UJ I COBA DAN EVALUASI
5.1 Analisis Pengujian Hardware
Pada bagian ini akan dibahas mengenai pengujian pada hardware yang telah dirancang. Tujuan dari pengujian ini adalah untuk mengetahui apakah
hardware tersebut telah berfungsi dengan benar dan sesuai rencana atau tidak. Pengujian ini ditujukan pada pengujian komponen yang terdapat pada robot serta pengujian robot berbasis kamera cmucam untuk mengidentifikasi warna benda.
5.2 Pengujian Alat
Berikut ini adalah pengujian alat atau komponen yang terdapat pada robot mengidentifikasi warna benda.
5.2.1 Pengujian Motor Servo
Pada uji coba terhadap blok motor driver penulis menggunakan dua sumber catu daya, yaitu dengan menggunakan sebuah 8 buah baterai 1,5 volt.
Tabel 5.1 Hasil Pengujian Rangkaian Driver Servo
Enable Servo Kiri Servo Kanan Keadaan motor Hasil uji 0 - - Tidak berputar Sesuai
1
0 0 Tidak berputar Sesuai 0 1 Berputar kiri Sesuai 1 1 Bergerak maju Sesuai
5.2.2 Pengujian Tombol Switch
Pengujian dilakukan dengan cara menyalakan robot guna mendapatkan tegangan pada rangkaian tombol switch dengan sumber catu daya ±12volt. Tujuan dari pengujian ini adalah untuk memastikan apakah tombol switch ini dalam kondisi benar sesuai fungsinya. Pada pengujian tombol switch bisa terlihat begitu tombol switch ditekan salah satu sesuai fungsinya maka robot akan melakukan tugasnya dan apabila tidak ditekan sama sekali maka robot tidak bergerak. Hasil pengujian dapat dilihat pada tabel 5.2.
Tombol
Switch Red Green Blue Posisi Hasil uji benda
Stop 1 1 1 Berhenti Sesuai
5.2.3 Pengujian Kamera Cmucam
Pada pengujian ini dilakukan dengan cara menentukan nilai ukuran
tracking colour pada kamera cmucam dengan menghubungkan port kamera cmucam ke komputer. Tujuan dari pengujian ini adalah untuk memastikan nilai
tracking colour yang ditentukan. Pada pengujian tracking colour kamera cmucam ini bisa terlihat berapa nilai ukuran kamera cmucam ini untuk menangkap warna benda yang sudah ditentukan. Disini tracking colour menggunakan pacuan RGB (Red, Green, Blue) dan ukuran pixel kamera. Hasil pengujian dapat dilihat pada tabel 5.3.
Tabel 5.3 Hasil Pengujian Tracking Colour
5.3 Pengujian Robot Kamera Cmucam
Berikut ini akan ditunjukkan cara kerja robot secara keseluruhan, dari robot mencari benda yang warnanya sudah disesuaikan dan akan dituju sesuai dengan warna inputan sampai menghampiri warna benda tersebut.
a) Pengujian Robot Standby
Untuk mencari benda yang warnanya telah disesuaikan dari posisi awal robot diam. Pertama nyalakan switch power ON/OFF untuk mendapatkan sumber catu daya ±8volt dan kemudian tunggu hingga robot dalam posisi standby. Disini penulis menggunakan gerakan robot maju sekali untuk mengetahui jika robot tersebut sudah standby. Hasil pengujian dapat dilihat pada gambar 5.1.
Gambar 5.1 Posisi Robot Standby
(empat) pilihan yaitu tombol merah yang posisinya paling kiri, tombol hijau yang posisinya setelah tombol merah, tombol biru yang posisinya setelah tombol hijau, dan yang terakhir tombol paling kanan yaitu tombol stop. Maksud dari tombol stop ini berguna untuk menghentikan kegiatan robot di saat ready menjadi standby tapi tidak mematikan daya pada robot tersebut.
b) Pengujian Robot Mencari Benda
Untuk pencarian benda yang sudah ditentukan tinggal menekan tombol switch merah, hijau atau biru. Maka robot tersebut mulai pencariannya dengan cara memutar berlawanan arah jarum jam. Hasil pengujian dapat dilihat pada gambar 5.2.
Gambar 5.2 Posisi Robot Mencari Benda
untuk menghampiri bola yang berwarna merah tersebut. Berarti robot tersebut sudah melakukan tugasnya dengan benar. Hasil pengujian dapat dilihat pada gambar 5.3.
Gambar 5.3 Posisi Robot Mendapatkan Bola Warna Merah
Jika disaat robot dalam posisi melakukan pencarian bola warna merah tetapi yang dikeluarkan bukan bola warna merah maka robot tersebut tidak ada reaksi untuk menghampiri bola warna selain merah tersebut. Robot akan melakukan pencarian terus menerus hingga mendapatkan bola berwarna merah.
berwarna hijau tersebut. Berarti robot tersebut sudah melakukan tugasnya dengan benar. Hasil pengujian dapat dilihat pada gambar 5.4.
Gambar 5.4 Posisi Robot Mendapatkan Bola Warna Hijau
Jika disaat robot dalam posisi melakukan pencarian bola warna hijau tetapi yang dikeluarkan bukan bola warna hijau maka robot tersebut tidak ada reaksi untuk menghampiri bola warna selain hijau tersebut. Robot akan melakukan pencarian terus menerus hingga mendapatkan bola berwarna hijau.
Gambar 5.5 Posisi Robot Mendapatkan Bola Warna Biru
Jika disaat robot dalam posisi melakukan pencarian bola warna biru tetapi yang dikeluarkan bukan bola warna biru maka robot tersebut tidak ada reaksi untuk menghampiri bola warna selain biru tersebut. Robot akan melakukan pencarian terus menerus hingga mendapatkan bola berwarna biru.
PENUTUP
6.1 Kesimpulan
Kesimpulan yang dapat peneliti ambil adalah sebagai berikut :
a. Pada penilitian ini peneliti akhirnya mengetahui cara merancang dan membuat robot yang dapat mendeteksi warna benda dengan kamera
CMUcam.
b. Pada penelitian ini juga peneliti bisa mengetahui merancang dan membuat program untuk menjadi robot yang dapat mendeteksi warna benda menggunakan kamera CMUcam.
c. Setelah melakukan perancangan dan pembuatan robot hingga programnya, peniliti akhirnya melakukan uji coba pengenalan benda yang kemudian
robot dapat mengenali benda tersebut dengan warna-warna yang berbeda (benda sudah ditentukan).
6.2 Sar an
Saran yang dapat peneliti ambil adalah sebagai berikut :
b. Untuk menambah fungsi dari robot ini bisa menambahkan lengan sehingga robot ini juga tidak hanya menghampiri benda tetapi juga bisa mengangkat atau memegang benda tersebut.
c. Robot ini juga bisa ditambah fungsinya dengan menambahkan sensor suara sehingga robot ini juga tidak hanya menghampiri benda tetapi juga bisa memberitahukan jenis benda dan warna benda untuk kaum tuna netra. d. Untuk mengatasi sumber catu daya, disarankan dapat menggunakan aki
kering atau juga dapat menggunakan adaptor.
e. Peneliti menggunakan bahasa C untuk pemrograman robot ini. Namun tidak menutup kemungkinan bila pemrogramannya diganti dengan bahasa yang lain.
f. Robot ini juga masih mempunyai banyak kekurangan, seperti terjadinya selip pada roda bebas dan kekurangan catu daya yang sangat banyak sehingga tidak memungkinkan untuk menggunakan batu baterai dalam pengoperasian jangka waktu yang panjang.
Budiharto,W. (2006). Belajar Sendiri Membuat Robot Cerdas, Elex Media Komputindo
Joni I Made dan Budi Raharjo (2008). Pemrograman C dan Implementasinya Edisi Kedua, Informatika Bandung
Pitowarno, E.(2006). Robotika Desain Kontrol, dan Kecerdasan Buatan. Andi Yogyakarta
Winoto Ardi. (2010). Mikrokontroler AVR ATmega8 / 16 / 32 / 8535 dan Pemogramannya dengan Bahasa C pada WinAVR Edisi Revisi, Informatika Bandung
Data Sheet Cmucam2.
http://www.cs.cmu.edu/~cmucam (15/6/2012)
Makalah Mikrokontroler ATMEL ATmega8515.
www.atmel.com/Images/doc2512.pdf (16/6/2012)
Makalah Motor Servo.
http://www.scribd.com/doc/78633227/Aplikasi-Motor-Servo-Dengan-Mikrokontroler (16/6/2012)
Program Download ke Mikrokontroler