MAKALAH
KONTROL OTOMATIS
KONTROL PID
KELOMPOK I
NURAENI H21111002
DWI NURFATIMAH H21111006
RISKI H21111008
ANDI SITI SUCIANA M. H21111
JURUSAN FISIKA
FAKULTAS MATEMATIKA DAN ILMUPENGETAHUAN ALAM UNIVERSITAS HASANUDDIN
KATA PENGANTAR
Assalamualaikum Warahmatullahi Wabarakatuh
Segala puji hanya bagi Allah Yang Maha Esa atas rahmat dan kehendak-Nya sehingga penulis dapat menyelesaikan Makalah ini. Syukur penulis atas karunia yang senantiasa dilimpahkan dari-Nya. Shalawat dan salam teriring kepada baginda rasulullah SAW atas kerja keras dan usahanya sehingga cahaya kebenaran sampai pada zaman kita.
Makalah yang berjudul “KONTROL PID” ini membahas tentang karaakteristik dari setiap pengontrol P, pengontrol I, dan pengontrol D, fungsi transfer dari PID controller, menyelesaikan masalah menggunakan PID controller dengan memanfaatkan software MATLAB, serta membahas terkait pedoman umum mendesain PID Controller.
Penulis menyadari bahwa makalah yang dibuat ini belum sempurna maka dari itu kami mohon pengertian beserta saran dan kritik dari para pembaca untuk meningkatkan kemampuan kami dalam menulis makalah serta untuk kesempurnaan makalah ini. Semoga makalah ini dapat memberikan manfaat dan ilmu bagi para pembaca dan demi untuk kemajuan pendidikan Indonesia.
Makassar, 18 november 2014
DAFTAR ISI
II.2. Karakteristik P,I,D Controller...5
II.3. Contoh Penyelesaian Masalah...5
a. Proportional Control...8
b. Proportional-Derivative Control...9
c. Proportional Integral Control...9
d. P-I-D Controller...10
II.4. Pedoman Umum Mendesain PID Controller...11
PENDAHULUAN
I.1. Latar Belakang
Seiring perkembangan teknologi elektronika dan informatika, teknologi komputer pun berkembang dengan baik dan semakin maju. Demikian juga teknologi kontrol yang mengalami banyak kemajuan dari kontrol konvensional ke kontrol otomatik sampai ke kontrol cerdas. Mulai dari peralatan industri kompleks hingga keperalatan rumah tangga. Beberapa sistem kontrol yang mudah dijumpai di antaranya adalah pengaturan pada mesin cuci, dispenser, pompa air otomatis dan sebagainya. Hal inilah yang menjadikan pemikiran sistem kontrol menjadi kompetensi yang harus dimiliki oleh mahasiswa untuk memenuhi kebutuhan masyarakat. Dalam mata kuliah sistem kontrol, salah satu materi yang diberikan adalah perancangan sistem kontrol. Untuk dapat merancang sistem kontrol yang baik diperlukan analisis untuk mendapatkan gambaran tanggapan sistem terhadap aksi pengontrolan.
langkah, fungsi undak, fungsi impuls atau fungsi lainnya, (2) Kestabilan sistem yang dirancang, (3)Tanggapan sistem terhadap berbagai jenis aksi pengontrolan Permasalahan yang dihadapi dalam perancangan sistem kontrol adalah mendapatkan fungsi alih dari sistem tersebut. Setelah fungsi alih didapatkan permasalahan selanjutnya adalah menganalisisnya apakah sistem yang dibuat sudah baik atau belum. Dalam mempelajari sistem kontrol tentu saja menjadi kewajiban bagi mahasiswa untuk dapat mencari fungsi alih sistem dengan pendekatan model matematik.
Tetapi setelah mendapatkan model fungsi alihnya, seringkali mahasiswa mengalami kesulitan dalam menganalis sistem karena kerumitannya. Dengan adanya Software Matlab proses analisis fungsi alih akan menjadi jauh lebih mudah dan cepat sehingga akan memudahkan dalam proses pembelajaran terutama dalam perancangan sistem kontrolnya. Untuk mengetahui lebih lanjut terkait hal-hal tersebut maka kami membuat makalah ini.
I.2. Ruang Lingkup
I.3. Tujuan
Adapun tujuan pembuatan makalah ini yaitu: 1. Menganalisis jenis-jenis Controller.
2. Membandingkan karakteristik P, I, D controller.
3. Menyelesaikan masalah pada MTLAB dengan menggunakan berbagai controller.
4. Mengetahui pedoman umum mendesain PID.
BAB I
II.1. PID
PID (Proportional Integral Derifative) ControllerI merupakan kontroller untuk menentukan kepresisian suatu sistem instrumentasi dengan karakteristik adanya umpan balik/feed back pada setiap sistem tersebut. Komponen PID terdiri dari 3 jenis yaitu, proporsional, integral, dan derifatif. Ketiganya dapat dipakai bersamaan maupun sendiri-sendiri, tergantung dari respon yang kita inginkan terhadap suatu plant.
II.2. Jenis-jenis Controller
Fungsi transfer dari PID Controller akan tampak sebagai berikut : KP + KI
S + KDs=
KD S2+K
pS+KI
S (2.1) KP = Proportional gain
KI = Integral gain
Skema seperti diatas, digunakan oleh cara kerja PID controller pada sistem tertutup. Variabel (e) menggambarkan tracking error, nilai masukan yang berbeda (R), keluaran aktual (Y), signal error ini akan dikirim ke PID controllr, dan controller akan menghitung keseluruhan turunan dan integral dari signal error ini. Sinyal (u) yang telah melewati controller, sekarang sama dengan proportional penguatan (Kp) dikalikan dengan ukuran kesalahannya ditambah penguatan integral (Ki) dikalikan ukuran kesalahan integralnya ditambah penguatan turunan (Kd) dikalikan ukuran kesalahan derivasinya.
u=KPe+KI
∫
e dt+KDdedt (2.2)
Sinyal (u) akan dikirim ke plant, dan akan mendapatkan keluaran baru (y). Keluaran baru (y) ini akan dikirim kembali ke sensor untuk mencari kesalahan sinyal baru (e). Controller membawa kesalahan signal baru tersebut dan menghitung turunan-turunannya dan integral-integralnya sekali lagi. Proses tersebut akan berjalan terus-menerus seperti semula.
II.2.1 Kontrol Proportional
Pengaruh pada sistem :
Menambah atau mengurangi kestabilan
Dapat memperbaiki respon transien khususnya : rise time, settling time Mengurangi (bukan menghilangkan) Error steady state
Catatan : untuk menghilangkan Ess, dibutuhkan KP besar, yang akan membuat
sistem lebih tidak stabil
Proportional kontroller (Kp) mengurangi waktu naik, meningkatkan overshoot dan mengurangi kesalahan keadaan tunak.
Fungsi transfer loop tertutup dari sistem diatas dengan proportional controller adalah :
• Kontrol proporsional
U(t) = Kp . e(t)
dimana Kp merupakanpenguatan proporsional (menguatkan sinyal) Sehingga diperoleh fungsi Alih sebagai berikut:
II.2.2 Kontrol Derivatif
Pengaruh pada sistem :
Memberikan efek redaman pada sistem yang berosilasi sehingga bisa memperbesar pemberian nilai Kp
Memperbaiki respon transien, karena memberikan aksi saat ada perubahan error
D hanya berubah saat ada perubahan error, sehingga saat ada error statis D tidak beraksi, Sehingga D tidak boleh digunakan sendiri
Besarnya sinyal kontrol sebanding dengan perubahan error (e)
II.2.3 Kontrol Integral
Pengaruh pada sistem :
Menghilangkan Error Steady State Respon lebih lambat (dibanding P)
Dapat menimbulkan ketidakstabilan (karena menambah orde sistem)
Perubahan sinyal kontrol sebanding dengan perubahan error, Semakin besar error, semakin cepat sinyal kontrol bertambah/berubah
Dengan mengubah Output (kontrol Integral) :
sehingga fungsi alihnya yaitu:
II.3. Karakteristik dari P, I, D Controller
M
meningkatnya stabilitas sistem, mengurangi overshoot, dan menaikkan respon transfer. Efek dari setiap controller (Kp, Kd,Ki) dalam sistem loop tertutup diperlihatkan pada tabel dibawah ini:
Respon
Loop Waktu Naik OVERSHOOT Waktu Turun KesalahanKeadaan
Kp Menurun
Kd perubahankecil Menurun Menurun perubahankecil
Tabel 2.1 Efek Controller
Korelasi tersebut kemungkinan tidak sepenuhnya akurat, karena Kp, Ki, dan kd saling bebas. Pada kenyataannya, mengubah salah satu variabel dapat mengubah dua yang lainnya. Karena alasan tersebut, tabel hanya digunakan sebagai referensi saat kita menentukan nilai untuk Ki, Kp, dan Kd.
II.4. Contoh Penyelesaian Masalah
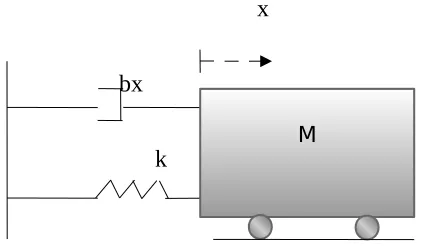
Anggaplah kita mempunyai masalah sederhana, tda massa, pegas, dan peredam.
x
bx
Gambar 2.1 Sistem yang terdiri atas massa, pegas dan peredam
Persamaan model dari sistem adalah:
M´x+b´x+kx=F (2.3)
Ambil transformasi Laplace dari persamaan model :
M s2X(s)+bsX(s)+kX(s)=F(s) (2.4)
Fungsi transfer antara pergeseran X(s) dan masukan F(s) sehingga menjadi :
X(s)
Isikan nilai-nilai tersebut dalam bentuk tranfer:
X(s) F(s)=
1 s2+10s+20
Tujuan masalah ini adalah menunjukkan bagaimana Kp, Ki, dan Kd untuk mendapatkan:
Waktu naik yang cepat Minimum overshoot
Respon langkah loop terbuka:
Mari pertama-tama kita lihat respon langkah loop terbuka. Buat m-file baru dan masukkan kode berikut :
num=1;
den = [1 10 20]; step (num,den)
Jalankan m-file tersebut di Command Window MATLAB yang akan menghasilkan plot seperti berikut ini:
Gambar 2.2 Respon langkah loop terbuka
Penguatan DC dari transfer fungsi ‘plant’ adalah 1/20, maka 0.05 adalah nilai akhir dari keluaran pada masukan sebuah langkah. Hal ini membuat kesalahan keadaan tunak 0.95 sebenarnya cukup besar. Terlebih lagi waktu naik sekitar satu detik dan waktu tunda sekitar 1.5 detik.
Berikut ini desain controller yang akan mengurangi waktu naik, waktu tunda dan menghilangkan kesalahan keadaan tunaknya.
Dari tabel 2.1 dapat diketahui bahwa proportional kontroller (Kp) mengurangi waktu naik, meningkatkan overshoot dan mengurangi kesalahan keadaan tunak. Fungsi transfer loop tertutup dari sistem diatas dengan proportional controller adalah :
X(s) F(s)=
Kp
s2+10s+(20+Kp) (2.6)
Tentukan proportional gain (Kp) = 300 dan ubah m-file berikut:
Kp=300; num=[Kp];
den=[1 10 20+Kp]; t=0:0.01:2;
step(num,den,t)
jalankan m-file di Command Window MATLAB agar menghasilkan plot.
Catatan: Fungsi MATLAB cloop dapat digunakan untuk mendapatkan fungsi transfer loop tertutup secara langsung dari fungsi transfer loop terbuka. M-file berikut ini menggunakan perintah cloop yang akan menghasilkan plot yang sama seperti di atas:
Sekarang mari perlihatkan PD control. Dari tabel terlihat jelas bahwa Derivatif controller (Kd) mereduksi baik itu overshoot maupun waktu turun. Fungsi transfer loop tertutup dari sistem di atas dengan PD controller adalah :
X(s) F(s)=
Kps+Kp
s2+
(
10s+Kp)
s+(20+Kp) (2.7)Tentukan Kp=300 seperti sebelumnya dan Kd=10. Masukkan perintah berikut ke dalam m-file dan jalankan di Command Window MATLAB.
Kp=300;
Sebelum membahas PID controller, mari kita pahami PI control. Dari tabel kita dapatkan bahwa I controller (Ki) menurun pada waktu naik, meningkat pada overshoot dan waktu turun dan menghilangkan kesalahan keadaan tunak. Dari sistem yang dicontohkan, fungsi transfer loop-tertutup dengan PI controller
Mari kita kurangi Kp sampai 30, Ki=70. Buat m-file baru, masukkan perintah berikut:
Ki=70; num=[Kp,Ki];
den=[1 10 20+Kp]; t=0:0.01:2;
step (num, den, t)
Jalankan m-file tersebut di Command Window MATLAB sehingga menghasilkan plot.
II.4.4 P-I-D Controller
Sekarang perhatikan PID controller, fungsi transfer loop tertutup pada sistem yang dicontohkan dengan PID controller adalah:
X(s) masukkan perintah berikut dalam m-file dan jalankan di Command Window. Anda seharusnya mendapatkan plot respon langkah seperti berikut:
Kp=350;
II.5. Pedoman Umum Mendesain PID controller
1. Dapatkan respon loop terbuka dan tentukan apa saja yang ingn ditingkatkan.
2. Tambahkan P-Control untuk menambah waktu naik. 3. Tambahkan D-Control untuk menambah overshoot.
4. Tambahkan I-Control untuk menghilangkan kesalahan keadaan tunak. 5. Seimbangkan setiap Kp, Ki, Kd sampai didapatkan keseluruhan respon
yang diinginkan. Anda dapat merujuk pada tabel 2.1 sebagai pegangan karakteristik controller.
Akhirnya, anda tidak perlu menerapkan ketiga kontroller (P,I,D) dalam sistem tunggal jika tidak perlu. Sebagai contoh, jika PI-controller sudah memberikan respon yang cukup baik (seperti contoh di atas), maka anda tidak perlu menerapkan D-controller pada sistem tersebut. Usahakan sedapatmungkin mudah dijalankan.
BAB III
HASIL DAN PEMBAHASAN
III.1 Hasil
Berikut ini hasil dari beberapa desan controller dengan menggunakan controller yang berbeda:
Gambar 3.1 Respon langkah loop tertutup
III.1.2 Proprtional-Derivative Control
Gambar 3.2 Respon langkah dengan PD controller
Gambar 3.3 Respon langkah dengan PI
III.1.4 P-I-D Controller
Gambar 3.4 Respon langkah dengan PID
III.2 Pembahasan
Gambar 3.1 yakni respon langkah loop tertutup dangan menggunakan proportional control menunjukkan bahwa proporsional controller mereduksi waktu naik dan kesalahan keadaan tunak, meningkatkan overshoot, mengurangi waktu turun dalam skala kecil.
Gambar 3.3 yaitu plot respon langkah dengn PI controller. Kita telah mereduksi Kp karena I controller juga mereduksi waktu naik dan meningkatkan overshoot seperti yang dilakukan P controller (efeknya ganda). Respon diatas menunjukkan bahwa I controller menghilangkan kesalahan keadaan tunak.
Gambar 3.4 merupakan plot respon langkah dengan PID. Plot ini menunjukkan bahwa sistem dengan waktu naik yang cepat, tanpa overshoot, dan tanpa kesalahan keadaan tunak.
BAB IV
PENUTUP
IV.1 Kesimpulan
Adapun kesimpulan dari makalah ini adalah sebagai berikut ;
1. Ada tiga jenis controller yaitu proportional, integral, dan derivative.
transient yang buruk. Sedangkan derivatif controller akan memberikan efek meningkatkan stabilitas sistem, mengurangi overshoot, dan menaikkan respon transient.
3. Masalah dalam sistem kontrol dapat diselesaikan menggunakan Proportional kontrol, P-D control, PI control, dan PID controller.
IV.2 Saran
Makalah ini masih jauh dari kesempurnaan, masih perlu tambahan teori dan conto-contoh yang lebih kompleks. Namun terlepas dari hal tersebut semoga makalah ini bisa memberikan sedikit gambaran umum terkait PID controller.
DAFTAR PUSTAKA
Anonim. 2011. “Teori Kontrol PID Proportional, Integral, Derivetive”.
https://www.academia.edu/4607460/Teori_Kontrol_PID_Proportional_I
ntegral_Derivative. diakses pada tanggal 15/12/2014 pukul 21.33. Wahyu, Thomas dkk. 2003.” Analisis dan Desain Sistem Kontrol Dengan