LANDASAN TEORI
2.1 Graf Dinamis (Dynamic Graph)
Sebuah grafGfully weighted didefinisikan sebagaiquadrupleG= (V, E, f, g)
dimana V adalah himpunan terhingga titik (verteks), E adalah himpunan
ter-hingga garis (edge) yang menghubungkan titik satu dengan lainnya,f merupakan
fungsi yang diberikan pada himpunan titik sebagai f :V →N, dan g merupakan
fungsi yang diberikan pada himpunan edge sebagai g :E →N. Sebuah graf G
dinamis diperoleh dengan mengubah sembarang V, E, f atau g. Harary (Harary,
1997) mengklasifikasikan graf dinamis dengan mengubah satu atau lebih kondisi
berikut ini:
1. Node dynamic (di)/graph dimana himpunan verteksV berubah dari waktu
ke waktu
2. Edge/Arc dynamic (di)/graphdimana himpunan garisE berubah dari
wak-tu ke wakwak-tu
3. Node weighted dynamic (di)/graph dimana fungsi f berbeda dari waktu ke
waktu
4. Edge/Arc weighted dynamic (di)/graph dimana fungsig berbeda dari waktu
ke waktu
Sebuah graf disebut dinamis penuh (fully dynamic), jika perubahan yang
dimungkinkan adalah penambahan dan penghapusan verteks dan/atau garis.
Se-baliknya sebuah graf disebut dinamis sebagian (partially dynamic), jika
peru-bahan yang dimungkinkan hanya penamperu-bahan atau penghapusan garis dan/atau
verteks. Selanjutnya, sebuah graf dinamis disebut incremental jika operasi yang
dimungkinkan hanya penambahan dan disebut decremental jika operasi yang
di-mungkinkan hanya penghapusan.
Dalam penggunaannya, graf dinamis dimungkinkan untuk berubah dari
wak-tu ke wakwak-tu seperti penambahan dan penghapusan garis dan verteks serta
per-ubahan informasi/atribut dari garis dan verteks. Dalam masalah graf dinamis,
terdapat sejumlah pertanyaan seperti: apakah graf tersebut terhubung atau tidak
(connectivity), bagaimana mendapatkan lintasan terpendek antar verteks
(short-est path), bagaimana melakukan clustering, bagaimana menghasilkan spanning
forest, bagaimana memastikan keterjangkauan (reachability) dan lain-lain.
Tu-juan dari algoritma graf dinamis adalah memperbaharui solusi atas masalah
se-cara efisien setelah terjadinya perubahan tanpa harus menghitungnya kembali
dari awal. Operasi penambahan verteks mengharuskan penambahan garis dengan
menghubungkan verteks baru ke salah satu verteks yang ada pada graf
sebelum-nya. Sementara operasi penghapusan garis mengharuskan penghapusan titik, jika
ada titik yang terisolasi. Sedangkan operasi pembaharuan atribut dapat dilakukan
dan perubahan bobot pada garis tertentu. Dengan kemampuan yang fleksibilitas
tersebut, maka pengembangan dan analisis algoritma serta struktur data dinamis
untuk graf dinamis biasanya lebih sulit dibandingkan dengan graf statis.
2.1.1 Operasi Dinamis untuk Graf Tak Berarah
Pada sub bab ini dijelaskan teknik yang utama yang digunakan untuk
menye-lesaikan masalah pada graf dinamis tak berarah seperti partisi garis / titik dan
dekomposisi graf serta perubahan pohon secara dinamis.
2.1.1.1 Clustering.
Teknik clustering didasarkan pada partisi graf menjadi kumpulan subgraf
terhubung yang sesuai, yang disebut cluster, sedemikian hingga setiap operasi
perubahan hanya melibatkan sebagian kecil clusters. Biasanya operasi
dekom-posisi didefinisikan secara rekursif dan informasi tentang subgraf dikombinasikan
dengan topologi pohon. Perbaikan teknik clustering dalam konsep struktur
da-ta bersifat ambivalen (Frederikson, 1997), dimana garis dapat merupakan bagian
dari grup berbeda, dan hanya satu grup yang terpilih tergantung pada topologi
pohon telusur (spanning tree).
Aplikasi clustering terhadap masalah mempertahankan sebuah minimum
spanning forest seperti dijelaskan oleh Frederikson (Frederickson, 1985).
Misal-kanG= (V, E) sebuah graf dengan sebuahspanning tree S. Clustering digunakan
S, sedemikian hingga setiap subpohon hanya terhubung dengan beberapa
subpo-hon yang lain. Sebuah posubpo-hon topologi digunakan untuk merepresentasikan partisi
pohon S secara rekursif. Algoritma dinamis penuh yang hanya didasarkan pada
levelclustering tunggal dapat dilakukan dengan kompleksitas waktuO(m2/3) -
(li-hat pada Galil dan Italiano, 1992, dan Rauch, 1995). Jika partisi dapat dilakukan
secara rekursif, maka diperoleh kompleksitas waktu yang lebih baik yakniO(m1/2)
dengan menggunakan pohon topologi 2-dimensi (Frederickson, 1985, Frederickson,
1997).
Teorema 2.1 Minimum spanning forest dari sebuah graf tak berarah dapat di-hitung dalam waktu O(√m) untuk setiap update, dimana m adalah jumlah garis
pada graf tersebut.
Dengan teknik yang sama, kompleksitas waktuO(√m) dapat juga diperoleh
un-tuk masalah konektivitas dinamis penuh dan konektivitas 2-dimensi
(Frederick-son, 1985, Frederick(Frederick-son, 1997). Akan tetapi, jenis clustering yang digunakan
sangat tergantung masalah yang ingin diselesaikan.
2.1.1.2 Sparcification.
Menurut Epstein et al. (Epstein et al., 1997), sparsification merupakan
teknik umum yang dapat digunakan sebagai black box (tanpa mengetahui
in-ternal secara rinci) untuk menghasilkan algoritma graf dinamis. Sparsification
mengu-rangi ketergantungan terhadap jumlah garis dalam sebuah graf, sedemikian hingga
kompleksitas waktu untuk mempertahankan sifat tertentu dalam graf sebanding
dengan waktu untuk menghitungnya dalam graf jarang (sparse graph). Lebih
rinci, bila teknik tersebut dapat digunakan, kompleksitas waktu T(n, m) untuk
sebuah graf dengann verteks dan mgaris dapat ditingkatkan menjadiT(n, O(n))
yakni waktu yang dibutuhkan jika graf merupakansparse graph.
2.1.1.3 Randomisasi.
Clustering dansparsification memungkinkan untuk menghasilkan algoritma
deterministik yang efisien untuk masalah dinamis penuh. Berikut ini dijelaskan
cara kerja teknik randomisasi dengan input masalah konektivitas dinamis penuh.
Misalkan G = (V, E) sebuah graf yang ingin dipertahankan secara dinamis dan
misalkanF merupakan sebuahspanning treedariG.Dinyatakan sebuah garis pada
F sebagai garis pohon dan garis pada E\F adalah garis non-tree. Algoritma oleh
Henzinger dan King (Henzinger dan King, 1999) didasarkan pada pertimbangan
berikut:
1. Maintaining spanning forest: pohon dipertahankan menggunakan struktur
data Euler Tour yang memungkinkan untu mendapatkan waktu logaritma
untuk algoritma update dan query
2. Random sampling: jika garis e dihapus dari graf pohon T, maka digunakan
pengganti e secara cepat
3. Graph decomposition: pertimbangan terakhir adalah menggabungkan
ran-domisasi dengan dekomposisi graf. Dekomposisi garis pada graf G yang ada
dipertahankan dengan menggunakan waktu O(logn)
Teorema 2.2 (Henzinger dan King,1999). Misalkan G merupakan graf dengan m0 garis dan n verteks dengan operasi yang dimungkinkan hanya penghapusan
garis. Sebuah spanning forestF dariGdapat dipertahankan dalam waktuO(log3n)
untuk setiap penghapusan, jika terdapat setidaknya Ω(m0) penghapusan. Waktu
untuk query adalah O(logn)
2.1.2 Operasi Dinamis untuk Graf Berarah
Pada sub bab ini dijelaskan teknik yang utama yang digunakan untuk
menye-lesaikan masalah lintasan dinamis pada graf berarah yakni algoritma transitive
closure dan lintasan terpendek. Kedua masalah tersebut memainkan peran
pent-ing dalam sejumlah aplikasi seperti optimisasi jarpent-ingan dan transportasi, sistem
informasi lalu lintas,database, compiler, garbage collection, interactive verification
systems, robotik, analisis aliran data dan lain-lain.
2.1.2.1 Kleene Closure.
Masalah lintasan seperti transitive closure dan lintasan terpendek sangat
(Cormen et al., 2001). Transitive closure dari sebuah digraf dapat diperoleh dari
matriks tetangga dari graf tersebut melalui operasi pada semiring dari matriks
Boolean, yang dinotasikan dengan {+,•,0,1}. Operasi + dan • menyatakan
perjumlahan dan perkalian dalam matriks Boolean.
Lemma 2.3 MisalkanG= (V, E)sebuah digraf danT C(G)merupakan transitive closure dari G. Jika X adalah matriks tetangga Boolean dari graf G, maka
mat-riks tetangga Boolean dari T C(G) adalah Kleene closure dariX pada {+,•,0,1}
Dengan cara yang sama, jarak lintasan terpendek dalam sebuah digraf
de-ngan bobot bilade-ngan riel dapat diperoleh dari matriks bobot dari graf melalui
operasi-operasi pada semiring dari matriks bilangan riel, yang dinotasikan
de-ngan{L ,J
,R} atau lebih sederhana dengan{min,+}. Dalam hal iniR adalah
himpunan nilai riel dimanaL
danJ
didefinisikan sebagai berikut. Misalkan dua
buah matriks bernilai riel A dan B, maka C = AL
B adalah matriks
perjum-lahan sedemikian hingga C[u, v] =min{A[u, w], B[w, v]}dan D = AJ
B dalah
matriks perkalian sedemikian hinggaD[u, v] =min1≤w≤n{A[u, w] +B[w, v]}yang
juga dapat dinotasikan dengan AB dimana AB[u, v] merupakan entry dari
mat-riks AB.
sik-lus. Jika X adalah matriks bobot sedemikian hingga X[u, v]merupakan bobot dari
garis (u, v) dalam G, maka matriks jarak dari G adalah Kleene closure dari X
pada semiring {L
Berikut dijelaskan dua metode yang biasa digunakan untuk menghitung
Kleene closure X∗ dari X dengan asumsi X adalah matriks n×n.
1. Logarithmic decomposition: merupakan metode untuk menghitungX∗
ber-dasarkan operasi kuadrat berulang yang membutuhkan waktu terburuk
sebe-sar O(nµlogn), dimana O(nµ) merupakan waktu yang dibutuhkan untuk
menghitung perkalian dua buah matriks pada sebuah semiring tertutup dan
µ ≤ 2,38 (pangkat terbaik untuk perkalian matriks saat ini). Metode ini
melakukan log2nperjumlahan dan perkalian dalam bentukXi+1 =Xi+Xi2,
dimanaX =X0 dan X∗ =Xlog
2n
2. Recursive decomposition: metode lain seperti dikemukakan Munro (Munro,
1971) yang didasarkan pada strategi divide-and-conquer dan menghitung
X∗ dalam O(nmu) untuk waktu terburuk. Munro menjelaskan bahwa
ji-ka X dipartisi ke dalam 4 submatriks A, B, D, C dengan ukurann/2×n/2
(susunan submatriks sesuai dengan arah jarum jam), dan matriksX∗
rekursif sesuai dengan persamaan berikut:
E = (A+BD∗C)∗ |F =EB |G=D∗CE |H =D∗ +D∗CEBD∗ (2.3)
Terkait denganclosuredidefinisikanfully dynamic transitive closure problem,
dimana ingin dipertahankan sebuah digraf G = (V, E) dengan operasi gabungan
berikut:
1. Insert(u, v): sisipkan (tambah) sebuah garis (u, v) dalam G;
2. Delete(u, v): hapus garis (u, v) dari G;
3. Query (u, v): output yes jika ada lintasan dari u kev dalamG, dan no jika
tidak.
Solusi sederhana atas masalah di atas terdiri dari mempertahankan graf
dengan operasi sisip dan hapus, kemudian mengecek apakah v terjangkau dari u
setelah masing-masing operasi. Operasi insert dan delete membutuhkan waktu
O(1) serta O(m) untuk operasi query, dimana m adalah jumlah garis saat ini
pada graf setelah operasi.
2.1.2.2 Locality.
Demetreseu dan Italiano (Demetreseu dan Italiano, 2003) mengajukan
kelas lintasan yang ditentukan oleh sifat-sifat lokal, yakni, sifat-sifat yang tetap
berlaku untuk semua sublintasan sempurna, meskipun sifat-sifat tersebut mungkin
tidak berlaku untuk keseluruhan lintasan. Mereka menunjukkan bahwa
pen-dekatan tersebut memainkan peranan penting dalam memepertahan-kan lintasan
terpendek.
Definisi 2.1 Sebuah lintasan π dalam sebuah graf disebut locally shortest jika dan hanya jika setiap sublintasan sempurna dari π adalah lintasan terpendek.
Definisi 2.1 diinspirasi oleh sifat substruktur optimal dari lintasan terpendek
yakni: semua sublintasan dari sebuah lintasan terpendek adalah terpendek. Akan
tetapi, lintasan terpendek secara lokal mungkin tidak terpendek. Fakta bahwa
lin-tasan terpendek lokal merupakan sebuah kasus khusus memungkin-kan linlin-tasan
terpendek lokal tersebut menjadi alat yang berguna dalam menghitung dan
mem-pertahankan jarak dalam sebuah digraf. Pada dasarnya lintasan terpendek yang
diperoleh secara lokal mempunyai sifat-sifat kombinatorial menarik dalam graf
yang berubah secara dinamis. Sebagai contoh, tidak sulit membuktikan bahwa
jumlah lintasan terpendek lokal yang mungkin berubah akibat dari perubahan
bobot sebuah garis adalah O(n2) jika perubahan yang terjadi adalah perubahan
parsial (hanya penambahan atau penghapusan)
start dan stop yang terpendek secara lokal pada setiap operasi adalah O(n2)
Definisi 2.2 Sebuah lintasan terpendek historis (historical shortest path) adalah lintasan yang telah menjadi terpendek paling tidak sekali setelah perubahan
ter-akhir
Dalam hal ini diasumsikan bahwa sebuah lintasan diperbaharui bila bobot
dari salah satu garis pada lintasan tersebut berubah. Dengan menggunakan teknik
locality terhadap lintasan historis, akan diperoleh lintasan historis secara lokal.
Dengan demikian sebuah lintasan p disebut historis secara lokal jika dan hanya
jika setiap sublintasan sempurna dari p juga adalah historis. Lintasan lokal yang
historis juga termasuk di dalam lintasan terpendek, dan fakta ini memberikan
kemudahan dalam menghitung dan mempertahankan jarak dalam graf.
Lemma 2.6 Jika himpunan lintasan terpendek, lintasan terpendek lokal dan lin-tasan terpendek historis dalam sebuah digraf dinotasikan SP, LSP dan LHP
se-cara berturut-turut, maka berlaku hubungan SP ⊆LSP ⊆LHP
Berbeda dengan lintasan terpendek lokal, lintasan terpendek historis
mem-punyai sifat kombinatorial yang menarik dalam digraf yang dapat digunakan
un-tuk operasi dinamis penuh. Secara khusus, dimungkinkan unun-tuk membuktikan
bahwa jumlah lintasan yang menjadi historis secara lokal dalam digraf pada
seti-ap operasi perubahan bobot garis tergantung pada jumlah lintasan historis dalam
Teorema 2.7 Misalkan G merupakan sebuah graf dengan urutan operasi peru-bahan (update). Jika pada saat tertentu selama peruperu-bahan terdapat paling banyak
O(h)lintasan historis dalam graf tersebut, maka jumlah lintasan renumerasi yang
menjadi historis secara lokal pada setiap update adalah O(h)
Untuk membuat perubahan dalam lintasan historis lokal kecil, diharapkan
untuk memiliki lintasan historis sesedikit mungkin. Pada dasarnya,
dimungkin-kan untuk mentransformasidimungkin-kan setiap urutan update ke dalam sebuah barisan
yang lebih panjang yang ekivalen dengan yang menghasilkan sedikit lintasan
his-toris. Secara khusus, terdapat sebuah strategi yang halus dengan urutan update
S dengan panjang k menghasilkan sekuensF(Σ) yang secara operasional ekivalen
dengan panjang O(klogk) yang hanya menghasilkanO(logk) lintasan terpendek
historis antara masing-masing verteks dalam graf (Demetreseu dan Italiano, 2003).
Menurut teorema 2.7 di atas, teknik ini mengakibatkan bahwa hanya O(n2logk)
lintasan historis lokal yang berubah pada setiapupdate dalamsmoothed sequence
F(Σ). Dengan lemma 2.3, lintasan historis lokal terdapat dalam lintasan
terpen-dek, sehingga ini adalah algoritma yang efisien untukall pairs shortest path yang
dinamis penuh.
2.1.2.3 Fully Dynamic Single-Source Shortest Paths Problem.
Tujuan dari Fully Dynamic Single-Source Shortest Paths Problem adalah
1. Increase (u, v, ǫ): meningkatkan bobot garis (u, v) sebesar ǫ
2. Decrease (u, v, ǫ): mengurangi bobot garis (u, v) sebesar ǫ)
3. Query (v): output lintasan terpendek antara verteks asal tertentu dengan
verteksv dalam graf G jika ada
Algoritma insert (incremental): semua algoritma incremental mempu-nyai waktu eksekusi O(1) untuk operasi query, sepanjang transitive closure dari
graf dapat dipertahankan. Solusiincremental pertama diberikan oleh Ibaraki dan
Katoh (Ibaraki dan Katoh, 1983) yang didasarkan ide sangat sederhana: ketika
menambahkan garis (x, y), apakah ada lintasan dari u ke x dan lintasan dari x
ke v, maka v terjangkau (reachable) dari u, jika sebelumnya tidak.
Komplek-sitas waktu dari algoritma adalah O(n3) untuk sembarang operasi sisip. Batas
waktu tersebut kemudian diperbaiki menjadi O(n) oleh Italiano (Italiano, 1986)
dimana algoritma tersebut juga dapat menghasilkan sebuah lintasan antara
sem-barang pasangan verteks, jika ada, dalam waktu linier dalam panjang lintasan itu
sendiri. Waktu O(n) per operasi dan O(1) per query juga didapatkan oleh La
Poutre dan Leeuwen (La Poutre dan Leeuwen, 1988). Akhirnya, Yellin (Yellin,
1993) memberikan algoritma dengan waktu eksekusi yang baik pada graf dengan
degree terbatas dengan kompleksitas waktu O(m∗D) untuk m sisi, dimana m
adalah jumlah garis dalam transitive closure akhir dan D adalah out-degree dari
Algoritma delete (decremental): solusi hapus diberikan oleh Ibaraki dan Katoh (Ibaraki dan Katoh, 1983) dimana mereka mengajukan algoritma
depth-first dengan waktu eksekusi O(n2) per operasi hapus. Batas tersebut diperbaiki
oleh La Poutre dan Leeuwen (La Poutre dan Leeuwen, 1988) dengan waktuO(m)
per operasi hapus. Italiano (Italiano, 1988) mengajukan algoritma
decremen-tal pada acyciclic digraph dengan waktu penghapusan O(n). Berikutnya, Yellin
(Yellin, 1993) memberikan algoritma dengan waktu O(m∗D) untuk m sisip,
di-mana m adalah jumlah garis dalam transitive closure akhir dan D adalah
out-degree dari graf awal. Terakhir, Henzinger dan King (Henzinger dan King, 1995)
mengajukan algoritmadecremental transitive closure dengan kompleksitas waktu
O( n
logn) untukquery dan O(nlogn) untuk operasi update.
2.2 Algoritma Kunang-kunang (Firefly Algorithm)
2.2.1 Pengenalan Algoritma
Fireflies (kunang-kunang), merupakan jenis kumbang ukuran kecil
(ter-masuk dalam keluarga Lampyridae) yang mempunyai kemampuan untuk
meng-hasilkan cahaya (cold light) untuk menarik perhatian pasangannya.
Kunang-kunang diyakini mempunyai satu mekanisme seperti kapasitor yang dialiri arus
dengan ukuran tertentu sampai batas tertentu, dimana mereka dapat
meman-carkan energi dalam bentuk cahaya, kemudian siklus berulang. Hasil eksperimen
menunjukkan bahwa tanpa stimulus eksternal, individu kunang-kunang
individu mempunyai kesamaan frekuensi pancaran cahaya. Meskipun mekanisme
pasti tidak diketahui, diyakini bahwa individu kunang-kunang tersebut
meres-pon pancaran cahaya dari individu lain dengan cara menyesuaikan muatan listrik
dalam kapasitornya. Dengan cara seperti ini, masing-masing individu secara
per-lahan menyesuaikan pancaran cahaya dengan kunang-kunang yang ada di
seki-tarnya untuk menciptakan pancaran cahaya yang sinkron danrobust. Mekanisme
tersebut sederhana dalam basis individu, namun perilaku yang terjadi akan
san-gat kompleks dalam kelompok dimana perubahan sedikit saja dari satu individu
memberikan akibat yang sangat signifikan terhadap sinkronisasi grup. Studi telah
menunjukkan bahwa kunang-kunang dari spesies berbeda menggunakan satu dari
dua mekanisme utama untuk mencapai sinkronisasi, yakni: fase tunda dan fase
lanjut (Smith, 2008, Durkota, 2011).
Algoritma Kunang-kunang (Firefly Algorithm) yang selanjutnya disingkat
dengan FA merupakan salah satu perkembangan terbaru sebagai metode dalam
kecerdasan kelompok (swarm intelligence) yang dikembangkan oleh Xin-She Yang
pada tahun 2008 dari Cambridge University (Yang, 2008). Algoritma ini
terma-suk algoritma meta-heuristik, yang terinspirasi dari alam dan bersifat stokastik
berdasarkan pada pola pancaran cahaya (seperti: bentuk, warna, ukuran,
intensi-tas,irama dan frekuensi) kunang-kunang dalam bersosialisasi (Sayadi et al., 2010).
Stokastik dalam arti menggunakan randomisasi dalam mencari himpunan solusi,
tinggi dimana proses pencarian yang digunakan dalam algoritma dipengaruhi oleh
pilihan antara randomisasi dan pencarian lokal. Setiap proses pencarian
meta-heuristik tergantung pada keseimbangan antara dua komponen utama yakni
ek-splorasi dan ekploitasi (Fister et al., 2013). Kedua komponen didefinisikan secara
implisit dan tergantung penentuan parameter kendali dari algoritma.
Algoritma FA telah menjadi alat yang semakin penting dalam kecerdasan
kelompok (swarm intelligence) yang telah diaplikasikan dalam hampir semua
ma-salah optimisasi. Banyak mama-salah dari berbagai bidang telah sukses diselesaikan
dengan menggunakan algoritma FA dan variannya. Algoritma FA didasarkan
pada pola pancaran cahaya yang dilakukan oleh kunang-kunang untuk menarik
pasangan atau memberikan peringatan pada calon pemangsa. Algoritma FA telah
banyak digunakan untuk menyelesaikan masalah optimisasi kontinu,
kombinato-rial, multi-objektif dan kendala, dan optmisasi dalam lingkungan yangnoisy dan
dinamis. Di samping itu, algoritma FA juga dapat diaplikasikan dalam bidang
machine learning, data mining, dan jaringan syaraf tiruan (Fister et al., 2013).
Pada dasarnya algoritma FA menggunakan aturan ideal berikut:
1. Kunang-kunang merupakan hewan unisex sehingga seekor kunang-kunang
hanya tertarik pada kunang-kunang lain terlepas dari jenis kelamin
2. Daya tarik (attractiveness) proporsional pada intensitas cahaya antar
dua kunang-kunang yang saling memancarkan cahaya, maka kunang-kunang
dengan cahaya redup akan mendekat pada yang memancarkan cahaya yang
lebih terang.
3. Kecerahan cahaya yang dipancarkan tergantung pada lingkungan terkait
de-ngan bentuk analitik dari fungsi objektif. Untuk permasalahan maksimum,
kecerahan dapat dianggap proporsional terhadap nilai fungsi biaya (Yang,
2008)
Daya tarik (attractiveness) dari seekor kunang-kunang ditentukan oleh
in-tensitas cahaya yang pada gilirannya diasosiasikan dengan fungsi objektif. Dalam
kasus sederhana untuk masalah optimisasi, intensitasI dari kunang-kunang pada
posisi xtertentu dapat dinyatakan sebagai I(x)≈f(x). Akan tetapi daya tarikβ
adalah relatif dan tergantung pada jarak antara kunang-kunangidengan
kunang-kunangj. Intensitas cahaya akan meredup seiring dengan pertambahan jarak dan
diserap oleh lingkungan. Intensitas cahaya I(r) bervariasi sesuai dengan jarak r
secara monotonik dan eksponensial, sebagai berikut:
I(r) =I0e−γr2
(2.4)
dimanaI0 adalah intensitas cahaya mula-mula danγ adalah koefisien penyerapan
cahaya.
dilihat oleh kunang-kunang lain di sekitarnya, maka variasi daya tarik β dapat
didefinisikan untuk jarak r dengan rumus:
β =β0e−γr2
(2.5)
dimana β0 adalah nilai daya tarik pada saat r = 0. Secara umum digunakan
β0 ∈ [0,1], Nilai γ memengaruhi variasi ketertarikan dengan pertambahan jarak
dari kunang-kunang yang berkomunikasi. Secara umum nilai γ yang digunakan
adalah [0,10] meskipun dimungkinkan untuk menggunakan nilai [0,∞). Karena
menghitung (1+1r2) lebih cepat dibandingkan dengan fungsi eksponensial, maka
nilai β dapat didekati dengan :
β = β0
1 +γr2 (2.6)
Pergerakan kunang-kunang iyang tertarik pada kunang-kunang dengan
in-tensitas cahaya yang lebih tinggij ditentukan oleh persamaan :
xt+1
i =xti +β0e−γr
2
i(xt
j −xti) +αtεti (2.7)
Suku kedua dari persamaan (2.7) tergantung pada daya tarik, suku ketiga
adalah randomisasi dengan α0 ∈[0,1] merupakan parameter acak, dan εt
i adalah
uniform lainnya pada saat t. Jika β0 = 0, maka akan terjadi pencarian acak
sederhana (simple random walk). Jika γ → 0, maka daya tarik β = β0 artinya
daya tarik menjadi konstan di setiap titik dalam ruang pencarian. Perilaku ini
menjadi kasus khusus dari particle swarm optimization (PSO). Sebaliknya, jika
γ → ∞, maka suku kedua dari persamaan (2.7) menjadi hilang dan
kunang-kunang akan bergerak secara acak yang pada prinsipnya menjadi sebuah versi
paralel dari simulated annealing. Faktanya, setiap implementasi algoritma FA
akan berada pada dua sifat asimtotis tersebut (Fister et al., 2013).
Jarak antara kunang-kunang i dan j didefinisikan dengan :
rij =kxi−xj k=
dimanaxi,k adalah komponen dari koordinat spasialxi dari kunang-kunang ke-k.
Dalam kasus 2−D, ri,j diperoleh :
ri,j =
q
(xi−xj)2−(yi−yj)2 (2.9)
2.2.2 Penentuan Parameter dan Deskripsi Algoritma FA
Seperti disebutkan di atas, algoritma FA dikendalikan oleh tiga buah
para-meter yakni: parapara-meter randomisasiα,attaractiveness βdan koefisien penyerapan
dua karakteristik asimtotis yakniγ →0 danγ → ∞. Jikaγ →0, maka parameter
β =β0 yakniattractiveness menjadi konstan di dalam ruang pencarian.
Parameterαt pada prinsipnya mengendalikan keacakan (dalam hal tertentu,
keragaman solusi), yang dapat disesuaikan parameter ini pada saat iterasi
sede-mikian hingga dapat bervariasi sesuai dengan iterasi t. Dengan demikian cara
yang baik menyatakanαt adalah menggunakan:
αt=α0δt; 0< δ <1 (2.10)
dimanaα0 merupakan faktor skala keacakan awal, danδmerupakan faktor
penye-juk (cooling factor). Untuk kebanyakan aplikasi, biasanya digunakan nilai δ =
0,95 sampai 0,97. Terkait dengan nilai awal α0, simulasi menunjukkan bahwa
FA akan lebih efisien jika α0 dikaitkan dengan skala peubah rancangan.
Mi-salkan L merupakan skala rata-rata problema, maka dapat diberikan nilai awal
α0 = 0,01L. Faktor 0,01 bermula dari fakta bahwarandom walk membutuhkan
sejumlah langkah untuk mencapai target sambil menyeimbangkan eksploitasi lokal
tanpa melompat terlalu jauh dalam beberapa langkah (Yang, 2009, Das, 2011).
Parameter β mengendalikan ketertarikan, dan studi menunjukkan bahwa nilai
β = 1 dapat digunakan untuk kebanyakan aplikasi. Akan tetapi,γharus dikaitkan
dengan skalaL dengan nilai γ = √1
L. Jika variasi skala tidak signifikan, maka
Untuk jumlah kunang-kunang (n) yang besar, jikan≫m, dimanamadalah
jumlah optima lokal dari problema optimisasi, konvergensi algoritma dicapai.
Dalam hal ini lokasi awal dari n kunang-kunang terdistribusi secara merata pada
semua ruang pencarian, dan selama iterasi algoritma berlangsung sampai semua
optimum lokal mencapai konvergensi. Dengan membandingkan solusi terbaik
di-antara optima lokal yang ada, optima global akan diperoleh. Dengan penyesuaian
parameterγ dan α, algoritma FA dapat melebihi algoritmaHarmony Search dan
PSO. Algoritma FA juga mungkin memperoleh optimal global serta optimal lokal
secara bersamaan dan efektif.
Algoritma FA didasarkan pada formula fisik dari intensitas cahaya I yang
melemah sebanding dengan kuadrat jarak (r2). Akan tetapi, jika jarak bertambah
maka daya serap cahaya mengecil yang mengakibatkan cahaya tersebut semakin
lemah. Fenomena tersebut dapat diasosiasikan dengan fungsi objektif yang ingin
dioptimalkan. Dengan demikian, algoritma FA dasar dapat diformulasikan dalam
pseudocode seperti pada Gambar 2.1 berikut ini (Fister et al., 2013).
Populasi kunang-kunang diinisialisasi oleh fungsi InitialisasiFA (biasanya
fungsi ini dilakukan secara acak). Proses pencarian oleh kunang-kunang dilakukan
di dalam loop while (baris 3−10) yang terdiri dari langkah-langkah berikut:
Mula-mula, fungsi AlphaNew digunakan untuk memodifikasi nilai awal
pa-rameterα (perlu dicatat bahwa langkah ini bersifat opsional). Berikutnya, fungsi
di-Gambar 2.1 Algoritma Dasar FA
lakukan di dalam fungsi ini). Selanjutnya, fungsi OrderFAmengurutkan populasi
kunang-kunang berdasarkan nilai fitness-nya. Setelah itu, fungsi FindTheBest
memilih individu terbaik di dalam populasi. Terakhir, fungsi MoveFAmelakukan
pergerakan posisi kunang-kunang dalam ruang pencarian ke arah individu yang
lebih atraktif. Proses pencarian kunang-kunang dikendalikan oleh maksimum
jumlah fungsi evaluasifitness (MAXF ES).
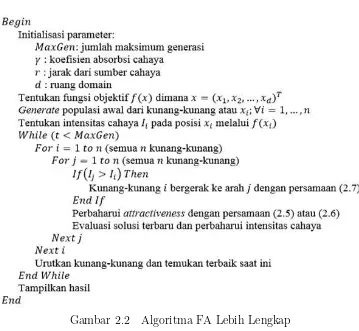
Dekripsi lain dari algoritma FA diberikan pada Gambar 2.2 berikut (Saibal
et al., 2012).
2.2.3 Kompleksitas dan Klasifikasi Algoritma FA
Hampir semua algoritma meta-heuristik sederhana dalam hal kompleksitas,
sehingga algoritma tersebut mudah untuk diimplementasikan. FA mempunyai 2
Gambar 2.2 Algoritma FA Lebih Lengkap
untuk iterasi t. Sehingga kompleksitas algoritma dalam keadaan ekstrim adalah
O(n2t). Dengannkecil (biasanyan = 40), dantbesar (misalnyat = 5000), waktu
komputasi relatif murah karena kompleksitas algoritma linier dalam t. Biaya
komputasi utama terjadi pada evaluasi fungsi objektif, khususnya untuk fungsi
objektif kotak hitam eksternal. Untuk masalah optimisasi, waktu paling besar
digunakan untuk mengevaluasi fungsi objektif (Yang dan He, 2013).
Jikanrelatif besar, dimungkinkan untuk menggunakan satu buahinner loop
dengan memberikan peringkat terhadap ketertarikan atau intensitas cahaya dari
semua kunang-kunang dengan menggunakan algoritma pengurutan. Dalam hal
waktu eksekusi lebih efisien dibandingkan dengan algoritmaswarmlainnya dengan
alasan:
1. Algoritma FA dapat secara otomatis membagi populasi ke dalam subgrup, karena fakta bahwa ketertarikan lokal lebih kuat dibandingkan dengan keter-tarikan jarak jauh. Sebagai akibatnya, algoritma FA dapat menangani masalah optimisasi dengan non-linier yang tinggi dan multi-modal secara alamiah dan efisien
2. Algoritma FA tidak menggunakan historis individu terbaik s∗, dan juga
tidak mempunyai global terbaikg∗. Hal ini dapat mencegah terjadinya
kon-vergensi yang prematur seperti pada algoritma PSO. Selanjutnya, algoritma FA tidak menggunakan kecepatan sehingga tidak mengalami masalah yang berhubungan dengan kecepatan seperti pada PSO
3. Algoritma FA mempunyai kemampuan untuk mengendalikan modalitas dan menyesuaikan dengan cakupan masalah dengan mengendalikan penskalaan parameter sepertiγ. Dalam kenyataannya, algoritma FA merupakan gener-alisasi dari SA, PSO dan DE (Fister et al., 2013).
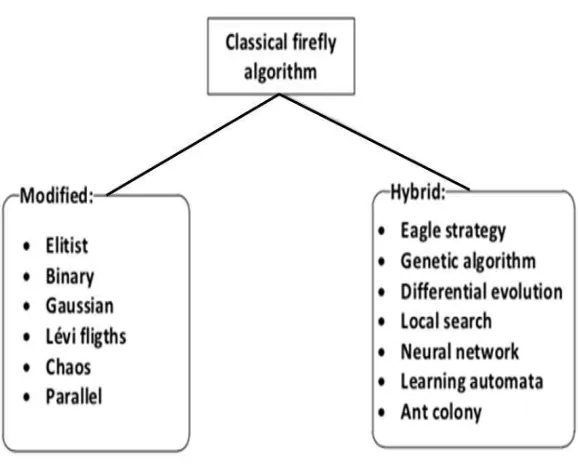
Algoritma FA mempunyai sejumlah varian dalam literatur, sehingga
dibu-tuhkan skema klasifikasi tertentu untuk membedakannya. Cara termudah adalah
berdasarkan penentuan parameter algoritma (strategi penentuan parameter).
Pe-nentuan parameter tersebut menjadi krusial untuk mendapatkan kinerja algoritma
yang lebih baik, sehingga harus ditentukan dengan cermat. Pada sisi
penyesua-ian parameter, kemungkinan nilai yang baik dapat diperoleh sebelum algoritma
dijalankan. Di sisi lain, pengendalian parameter dilakukan dengan memodifikasi
nilai parameter selama eksekusi algoritma. Lebih lanjut, sifat dari algoritma FA
tidak hanya tergantung pada nilai parameter, tetapi juga pada komponen atau
fitur yang diberikan. Berikut ini merupakan aspek-aspek penting dalam
1. Apa yang dimodifikasi
2. Bagaimana melakukan modifikasi
3. Berapa luas cakupan modifikasi
Berdasarkan aspek yang pertama, algoritma FA dapat diklasifikasikan
menu-rut komponen atau fitur mana yang dimiliki, yakni:
a. Representasi kunang-kunang (biner atau riil)
b. Skema populasi (swarm atau multi-swarm)
c. Evaluasi fungsi fitness
d. Penentuan solusi terbaik (non-elitism atau elitism)
e. Pergerakan kunang-kunang (uniform, Gauss, Levy flight, atau distribusi chaos)
Sementara menurut aspek yang kedua, kategori parameter algoritma FA
dapat dibedakan menjadi: deterministik, adaptif, atau self-adaptive. Kemudian
untuk aspek ketiga, modifikasi algoritma FA dapat memengaruhi: satu
kunang-kunang, seluruh kunang-kunang atau keseluruhan populasi.
Pada tahap awal, algoritma FA digunakan untuk menyelesaikan masalah
global, seperti masalah optimisasi kontinu. Untuk itu diperkenalkan ide hibrida
/ penggabungan dengan algoritma optimisasi lainnya, teknik machine learning,
heuristik dan lain-lain. Penggabungan dapat terjadi pada hampir semua
kompo-nen algoritma FA, seperti prosedur inisialisasi, fungsi evaluasi, fungsi pergerakan
dan sebagainya. Dalam perkembangannya, algoritma FA telah mengalami
Gambar 2.3 Taksonomi Algoritma FA
2.2.4 Intelligent Firefly Algorithm
Pada algoritma FA di atas, pergerakan (persamaan 2.7) ditentukan oleh
daya tarik dari kunang-kunang lainnya dimana ketertarikan adalah sebuah fungsi
jarak antar kunang-kunang. Akibatnya, seekor kunang-kunang dapat tertarik
pada yang lain hanya karena kedekatan yang mungkin menjauhkan minimum
glo-bal. Kunang-kunang diurutkan berdasarkan intensitas cahaya yang dihasilkan
yakni berdasarkan nilai dari fungsi objektif pada lokasi di mana dia berada. Akan
tetapi pengurutan (yang merupakan informasi penting) tersebut tidak digunakan
untuk menentukan dalam persamaan pergerakan. Seekor kunang-kunang tertarik
satu sama lain sehingga keduanya memberikan kontribusi pada pergerakan
de-ngan tingkat daya tarik masing-masing. Kondisi ini dapat mengakibatkan
FA cerdas (IFA) adalah menggunakan hasil pengurutan sedemikian hingga setiap
kunang-kunang digerakkan oleh daya tarik sebagian kunang-kunang bukan
keselu-ruhannya. Partisi ini merepresentasikan bagian paling atas dari kunang-kunang
berdasarkan urutannya. Dengan demikian, seekor kunang-kunang bertindak
cer-das bergerak bercer-dasarkan urutan teratas bukan hanya sekedar bercer-dasarkan daya
tarik.
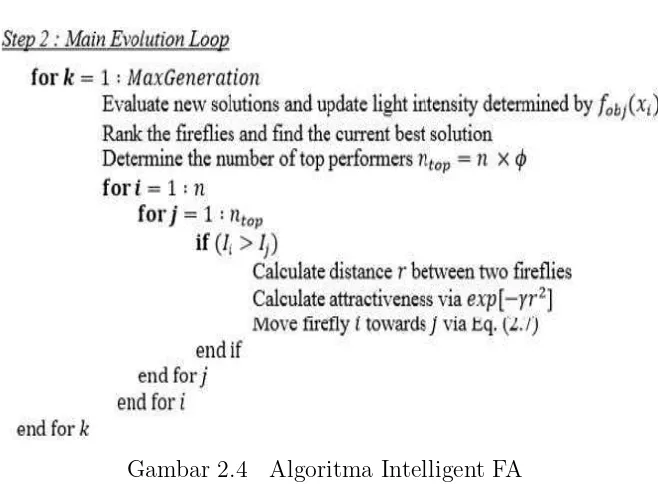
Pseudocode algoritma IFA dikembangkan oleh Fateen et. al (Fateen et al.,
2014) dapat dilihat pada Gambar 2.4 di bawah ini. Parameter baruφmerupakan
bagian dari kunang-kunang yang digunakan untuk menentukan pergerakan.
Para-meter ini digunakan sebagai batas atas untuk indeksj dalam inner loop. Dengan
demikian setiap kunang-kunang digerakkan hanya oleh bagian teratas φ.
Algo-ritma FA biasa menggunakan φ = 1 Kekuatan dari algoritma IFA adalah bahwa
lokasi terbaik kunang-kunang tidak memengaruhi arah dari pencarian, sehingga
tidak terjebak pada minimum lokal. Akan tetapi, pencarian atas minimum global
membutuhkan komputasi tambahan karena ada kemungkinan banyak
kunang-kunang yang bergerak tak tentu arah pada daerah yang kurang menarik. Dengan
modifikasi yang cerdas, nilai parameter φ yang sesuai dapat mempertahankan
kelebihan yang tidak terjebak dalam minimum lokal, serta dapat meningkatkan
kecepatan mendapatkan minimum global. Nilai φ yang sesuai memberikan
ke-seimbangan antara kemampuan algoritma terhindar dari jebakan minimum lokal
Gambar 2.4 Algoritma Intelligent FA
iteratif dapat digunakan untuk mencapai nilai φ yang baik untuk masalah yang
dioptimalkan. Modifikasi algoritma FA ini dapat meningkatkan kinerja algoritma
secara signifikan. Dengan pilihan parameterα, β, γdan jumlah iterasikyang lebih
besar dapat mengurangi keacakan sampai solusi minimum global ditemukan.
Al-goritma IFA dapat meningkatkan reliabilitas dan efektifitas dari alAl-goritma. Dalam
beberapa kasus minimum global tidak dapat ditemukan dengan algoritma FA
bi-asa, tetapi dengan modifikasi ini menjadi mungkin (Fateen et al., 2014).
2.3 Manajemen Rantai Pasokan
Menurut Global Supply Chain Forum (GSCF), manajemen rantai pasokan
pengguna akhir hingga pemasok awal yang menyediakan produk, layanan, dan
in-formasi yang menambahkan nilai bagi pelanggan danstakeholder lainnya” (Chan
et al., 2003). Christoper (Christoper, 1998) menyatakan bahwa rantai pasokan
adalah jaringan organisasi yang melibatkan keterkaitanupstreamdandownstream
dalam proses dan aktivitas berbeda yang menghasilkan ”nilai” dalam bentuk
pro-duk dan servis. Rantai pasokan memainkan peran penting dalam sumber daya
korporasi, yang pada gilirannya memengaruhi aspek sosial, ekonomi dan
lingkung-an dari bisnis (Tate et al., 2010). Denglingkung-an asumsi demikilingkung-an, korporasi semakin
melihat isu rantai pasokan sebagai bagian dari program berkelanjutan. Koplin
et al. (Koplin et al., 2007) mengidentifikasikan dua alasan besar untuk hal ini.
Alasan pertama adalah bahwa korporasi saat ini diwajibkan bertanggung jawab
untuk masalah sosial dan lingkungan yang disebabkan oleh operasional rantai
pasokan. Alasan kedua adalah bahwa peningkatan saham dalam nilai korporasi
diciptakan pada level pemasok. Dalam lingkungan bisnis saat ini yang sangat
kompetitif, manajemen rantai pasokan yang efektif akan menjadi faktor penting
untuk mencapai keunggulan kompetitif. Akan tetapi, bagaimana integrasi
di-lakukan, artinya masih terdapat jurang terkait dengan pengukuran kinerja rantai
pasokan berkelanjutan (Vermeule dan Seuring, 2009; Krause et al., 2009;
Seur-ing dan Muller, 2008a). Storey et al. (Storey et al., 2006) lebih lanjut
men-jelaskan bahwa manajemen rantai pasokan dapat dilihat sebagai tren yang lebih
jauh melibatkan kerangkaoutsourcing, cross-boundarydan bentuk organisasi baru
sebagai komando dan kendali yang kaku.
Sejumlah tantangan dan kendala dalam penerapan sustainable supply chain
manajemen(sSCM) terkait dengan: (1) kurangnya pemahaman keterkaitan yang
kompleks antara aktivitas ekonomi, lingkungan dan sosial dan bagaimana hal
tersebut memengaruhi ekonomi, (2) komitmen investasi modal, (3) memonitor dan
mengelola risiko, (4) pengukuran kinerja, (5) transparansi informasi dan
penge-tahuan, (6) penyesuaian strategi korporasi dengan inisiatif sSCM dan (7) budaya
korporasi (Christoper, 1998; Linton et al., 2007; Seuring dan Muller, 2008b; Storey
et al., 2006). Kebanyakan riset tentang rantai pasokan berkelanjutan hanya
mem-bahas tentang ekonomi dan lingkungan, sangat sedikit yang memasukkan aspek
sosial dalam kajiannya.
Manajemen rantai pasokan berkelanjutan Sustainable Supply Chain
Mana-gement (sSCM) berawal dari akarnya yakni manajemen rantai pasokan (SCM).
Harland (Harland, 1996) mendefinisikan supply chain management sebagai
”ma-najemen jaringan saling terkait dalam bisnis untuk penyediaan produk akhir dan
paket layanan yang dibutuhkan oleh pelanggan akhir.” Pada tahap berikutnya
SCM diperluas dengan menambahkan aspeksustainability. Aspek tersebut
meru-pakan integrasi isu sosial, lingkungan dan ekonomi (Carter dan Roger, 2008).
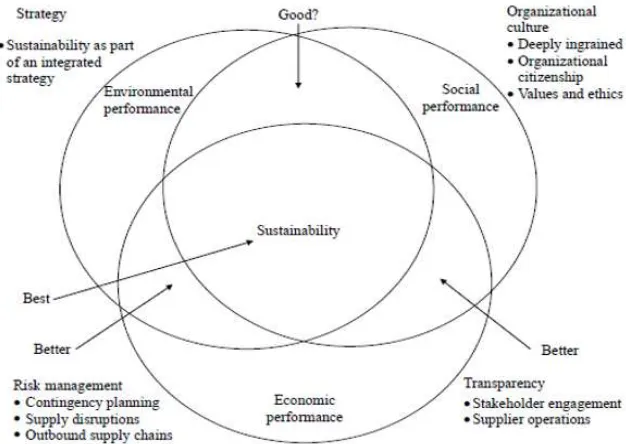
Carter dan Roger (Carter dan Roger, 2011) mengidentifikasi empat faktor
pen-dukung atau fasilitator dari sSCM, yakni: (1) strategi secara holistik dan
mendukung strategi keseluruhan rantai pasokan, (2) manajemen risiko,
terma-suk contingecy planning untuk upstream dan downstream dalam rantai pasokan,
(3) budaya organisasi yang secara mendalam yang berakar dan mencakup
orga-nizational citizenship, dan mengandung standar etis yang tinggi dan ekspektasi
dengan memberi respek terhadap masyarakat (di dalam maupun di luar
organi-sasi) dan lingkungan alam, serta (4) transparansi dalam hal partisipasi proaktif
dan mengkomunikasikannya dengan pemangku kepentingan kunci dan
mempu-nyai traceability dan visibility baik upstream maupun downstream dalam rantai
pasokan, seperti terlihat pada Gambar 2.5 di bawah ini.
Gambar 2.5 Sustainable Supply Chain Management (Carter dan Roger, 2011)
Shrivasta (Shrivasta, 2007) mendefinisikan sustainability sebagai ”potensi
untuk mengurangi risiko jangka panjang terkait dengan penurunan sumber daya,
Selanjutnya, Sikdar (Sikdar, 2003) mengungkapkan sudut pandang makro yang
mengandung aspek sosial, lingkungan dan ekonomi yang mendefinisikan
sustaina-bility sebagai keseimbangan yang bijaksana antara kinerja ekonomi, perlindungan
lingkungan dan tanggung jawab sosial.
Dari sudut pandang makro rantai pasokan sefta untuk mencapai
keseim-bangan antara dimensi ekonomi, lingkungan dan sosial (dikenal dengan triple
bottom line) yang dikembangkan oleh Elkington (Elkington, 2004), Teuteber dan
Wittstruck (Teuteber dan Wittstruck, 2010) sSCM didefinisikan sebagai
penca-paian strategis dan terintegrasi oleh satu perusahaan dalam tujuan sosial,
ling-kungan dan ekonomi. Hal tersebut dicapai melalui koordinasi sistemik dari proses
bisnis yang saling terkait antar organisasi untuk meningkatkan kinerja ekonomi
jangka panjang dari perusahaan secara individu dan jaringan nilainya, seperti
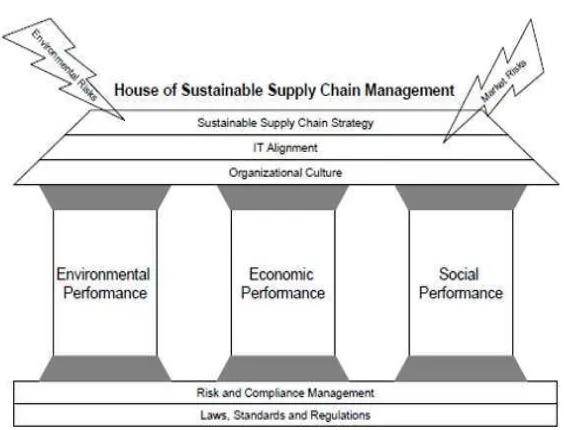
dikemukakan oleh Carter dan Roger (Carter dan Roger, 2008). Gambar 2.6
be-rikut ini merupakan area dan cakupan dari sSCM yang disebut dengan ”House of
Sustainable Supply Chain Management”.
”Rumah” tersebut dibangun di atastriple bottom line yakni kinerja
ekono-mi, perlindungan lingkungan dan tanggung jawab sosial (Carter dan Roger, 2008;
Elkington, 2004). Ketiga dimensisustainability divisualisasikan sebagai pilar yang
dibutuhkan untuk menjaga keseimbangan bangunan. Manajemen risk and
com-pliance membentuk fondasi dari bangunan. Untuk mencapai keuntungan jangka
Gambar 2.6 House of sSCM (Carter dan Roger, 2008)
digunakan sebagai titik awal untuk implementasi prinsip dan praktik
sustainabi-lity sepanjang rantai pasokan.
Sebagai tambahan, sSCM juga membutuhkan pengembangan nilai dan etika
di seluruh organisasi, lingkungan teknologi informasi yang efisien, fleksibilitas dan
konsep green serta penyesuaian strategi korporasi untuk mencapai pembangunan
yang berkelanjutan. Jika ukuran-ukuran tersebut dapat dijalankan, maka
orga-nisasi dapat melindungi jaringan terhadap ancaman dan risiko terkait
lingkung-an dlingkung-an sosial. Rumah sSCM tidak terbatas hlingkung-anya pada pengendalilingkung-an jaringlingkung-an
rantai pasokan, tetapi juga menerapkan manajemen teknologi informasi,
mana-jemen kepatuhan dan lingkungan serta sosial (Teuteber dan Wittstruck, 2010).
Kajian manajemen rantai pasokan terkait erat dengan green supply chain,
manufacturing dan product recovery, dan lain-lain (Bloemhof, 2005).
Area manajemen rantai pasokan dapat dibagi menjadi dua bidang yakni:
(i) konsep triple-P yang terdiri dari optimisasi profit (aspek ekonomi), people
(aspek sosial) dan kinerja terkait dengan planet (aspek lingkungan), yang
meru-pakan metrik untuk mengukur kinerja dariforward supply chain tradisional, dan
(ii) konsepclosed-loop supply chain management (CLSC) yang mengkombinasikan
forward danreverse supply chain dengan menutup aliran materi untuk membatasi
emisi gas dan limbah (Bloemhof, 2005). Perubahan cuaca, kelangkaan energi, dan
pertumbuhan penduduk yang pesat serta perkembangan teknologi memberikan
tekanan luar biasa terhadap kemampuan rantai pasokan global untuk
menyedi-akan barang dan layanan secara efektif dan efisien (Beamon, 2008).
Dalam literatur disebutkan bahwa terdapat dua kebutuhan riset lanjutan
dalam sSCM. Pertama, adanya kebutuhan berkelanjutan guna mengeksplorasi
pendekatan untuk mengintegrasikan ketiga pilar sustainability dari manajemen
rantai pasokan yakni dimensi lingkungan, ekonomi dan sosial. Kedua, adanya
ke-butuhan untuk mengembangkan sistem pengukuran kinerja untuk sSCM.
Selan-jutnya, studi literatur mengharapkan bahwa riset lanjutan harus bergerak di luar
dari kedua area pembahasan secara terpisah, melainkan harus mengarah kepada
pendekatan yang lebih terintegrasi. Pendekatan ini menekankan integrasi strategis
terhadap dimensi lingkungan, sosial dan ekonomi dari proses bisnis kunci secara
2.4 Fleksibilitas dalam Rantai Pasokan
Sejak tahun 1990-an, banyak perusahaan mencoba meningkatkan kinerja
ekonominya dengan menerapkan berbagai inisiatif dalam rantai pasokan.
Inisi-atif tersebut dimaksudkan untuk meningkatkan pendapatan (misalnya dengan
menawarkan produk lebih bervariasi, perkenalan produk baru yang lebih cepat,
memperbanyak saluran pemasaran), mengurangi biaya (dengan mengurangi
pa-sokan, e-commerce, lelang online, produksi off-shore manufacturing, sistem
pa-sokan just-in-time, dan vendor-managed inventory, mengurangi aset (dengan
out-sourcing manufacturing), pemanfaatan RFID dan GPS, serta logistik.
Inisi-atif tersebut akan bekerja efektif dalam kondisi stabil. Akan tetapi, dengan
meningkatnya jumlah jaringan rantai pasokan dan banyaknya pihak yang
terli-bat dalam rantai pasokan, mengakiterli-batkan rantai pasokan global tersebut menjadi
lebih ”panjang” dan lebih ”kompleks” yang pada akhirnya membuat manajemen
rantai pasokan semakin rumit dan membutuhkan tingkat fleksibilitas yang lebih
tinggi (Tang dan Tomlin, 2008). Rantai pasokan beroperasi dalam lingkungan
dinamis yang terdiri dari sekumpulan tujuan rantai pasokan, strategi keseluruhan
rantai pasokan, dan sistem ukuran kinerja.
Sejumlah penulis telah meneliti masalah bagaimana menggunakan proses
fleksibilitas dalam rantai pasokan. Iravani et al. (Iravani et al., 2005)
mem-perkenalkan konsep fleksibilitas untuk menyatakan kemampuan struktur
Tomlin, 2003) memberikan kerangka kerja untuk menganalisis keuntungan dari
fleksibilitas dalam sebuah rantai pasokanmultistage dan mengembangkan ukuran
fleksibilitas dan panduan untuk fleksibilitas investasi. Paper mereka menjawab
pertanyaan tentang struktur fleksibilitas seperti apa yang paling efisien dengan
syarat semua tahapan dalam rantai pasokan menggunakan struktur fleksibilitas
yang sama. Studi lain, diantaranya Fine dan Freund (Fine dan Freund, 1990),
Gupta et al. (Gupta et al., 1992), Suarez et al. (Suarez et al., 1995) dan Van
Mieghem (Van Mieghem, 1998). Tantangan yang dihadapi rantai pasokan saat ini
antara lain: pelanggan menuntut harga yang lebih murah, pergantian yang lebih
cepat, tingkat layanan yang tinggi, keterbukaan dan visibility terhadap semua
proses yang terjadi (Microsoft, 2009).
Fleksibilitas telah dianggap sebagai faktor utama untuk memenangkan
per-saingan dalam perper-saingan pasar yang semakin tinggi. Pujawan (Pujawan, 2004)
mengidentifikasikan lima dimensi penting dalam fleksibilitas yakni: sourcing
flex-ibility, product development flexflex-ibility, production flexflex-ibility, supply flexibility dan
delivery flexibility. Fleksibilitas dalam pengiriman produk terdiri dari: (1)
terda-pat mode transportasi berbeda dalam pengiriman barang ke pelanggan akhir, (2)
secara teknis dan ekonomis mudah menggabungkan beberapa produk dalam satu
kali pengiriman, (3) jumlah pengiriman minimum diperkecil, (4) tidak ada batasan
jumlah pengiriman dalam sebuah truk, kontainer atau angkutan lain, (5) dalam
transportasi berbeda, (6) dimungkinkan untuk memenuhi permintaan pelanggan
yang berasal dari gudang berbeda atau dimungkinkan untuk pengiriman barang
antar gudang atau antar retailer yang dikenal dengan istilah transhipment, (7)
pelanggan dimungkinkan untuk mengubah jumlah, jenis dan/atau tanggal
peng-iriman dalam waktu yang singkat dengan biaya pengpeng-iriman yang minimum.
Menurut Angel dan Perez (Angel dan Perez, 2005) dimensi fleksibilitas
ter-diri dari: (1) product flexibility, yakni kemampuan untuk menangani pesanan
yang tidak standar guna memenuhi spesifikasi pelanggan khusus dan menghasilkan
karakteristik produk dengan sejumlah fitur, opsi, ukuran dan warna, (2) volume
flexibility, yakni kemampuan dalam menaikkan dan menurunkan volume
produk-si secara efektif untuk memenuhi permintaan pelanggan yang secara langsung
memengaruhi kinerja rantai pasokan dengan mencegah kondisiout-of-stock untuk
produk dengan permintaan tinggi atau menghindarkan persediaan yang terlalu
tinggi, (3) routing flexibility, yakni kemampuan untuk memroses bagian tertentu
menggunakan mesin berbeda, penanganan material yang fleksibel, dan jaringan
transportasi yang berbeda; fleksibilitas ini mengurangi dampak negatif dari
keti-dakpastian lingkungan dan inefisiensi yang tak terlihat dalam proses produksi,
(4) delivery flexibility, yakni kemampuan untuk beradaptasi terhadap waktu
tun-da atas permintaan pelanggan jika pemasok mengirimkan produk ke pelanggan
dalam jumlah, tempat dan waktu yang tepat, (5) transhipment flexibility
fisik antara lokasi permintaan dan sumber tidak terlalu jauh, (6) sourcing
flexi-bility terkait dengan kemampuan perusahaan untuk mencari sumber lain untuk
komponen atau material khusus, (7)postponement flexibilitymengimplikasikan
ke-mampuan untuk menyimpan produk selama mungkin untuk memenuhi kebutuhan
pelanggan pada level berikutnya, (8) launch flexibility, yakni kemampuan untuk
memperkenalkan produk baru dari ragam produk dengan cepat yang
menginte-grasikan sejumlah aktivitas nilai sepanjang rantai pasokan, (9) access flexibility,
yakni kemampuan perusahaan menyediakan cakupan distribusi yang intensif dan
meluas, serta (10) dimensional flexibility yang cocok terhadap sejumlah industri
yakni tingkat respons terhadap pasar target.
Lee (Lee, 2004) dalam Triple-A Supply Chain, menekankan bahwa rantai
pasokan terbaik bukan hanya cepat dan cost effective, tetapi harus agile,
adapt-able dan semua kepentingan perusahaan harus tetap aligned. Agility mempunyai
tujuan untuk merespon perubahan jangka pendek dalam pasokan dan permintaan
dengan cara: (1) tetap memberikan informasi secara kontinu terkait pasokan dan
permintaan terhadap semua partner dalam rantai pasokan, (2) berkolaborasi
de-ngan pemasok dan pelanggan untuk mendesain ulang proses, komponen dan
pro-duk sedemikian hingga memberikan keunggulan dari saingan, (3) menyelesaikan
produksi hanya apabila diperoleh informasi yang akurat tentang keinginan
pelang-gan, dan (4) menyimpan persediaan yang sedikit untuk komponen yang tidak
adaptability mempunyai tujuan menyesuaikan rantai pasokan terhadap
perubah-an pasar yperubah-ang ditempuh melalui: (a) menelusuri perubahperubah-an ekonomi, khususnya
di negara berkembang, (b) menggunakan perantara untuk mendapatkan penjual
terpercaya di daerah yang kurang dikenal, (c) menciptakan fleksibilitas untuk
menjamin produk berbeda menggunakan komponen berbeda dan proses berbeda,
dan (d) menciptakan rantai berbeda untuk produk berbeda guna
mengoptimal-kan kemampuan masing-masing. Kemudian alignment mempunyai tujuan untuk
mengembangkan insentif kepada mitra dalam rantai pasokan, sehingga
mening-katkan kinerja keseluruhan rantai dengan cara: (i) menyediakan akses yang sama
kepada semua mitra terkait dengan data penjualan, perencanaan dan
perkira-an, (ii) memperjelas peran masing-masing mitra untuk menghindarkan konflik,
(iii) mendefinisikan ulang kemitraan untuk menanggung bersama risiko, biaya
dan penghargaan untuk meningkatkan kinerja rantai pasokan, dan (iv) menyusun
ulang insentif sehingga semua pemain dalam rantai pasokan memaksimalkan
ki-nerja rantai dan juga memaksimalkan keuntungan masing-masing dari kemitraan
tersebut.
2.5 Tantangan dalam Manajemen Rantai Pasokan
Ciri khas pasar global saat ini adalah tak terduga dan penuh risiko (IBM,
2010). Globalisasi mengakibatkan rantai pasokan semakin kompleks dan
selan-jutkan akan mengakibatkan terbukanya rantai pasokan terhadap gangguan dan
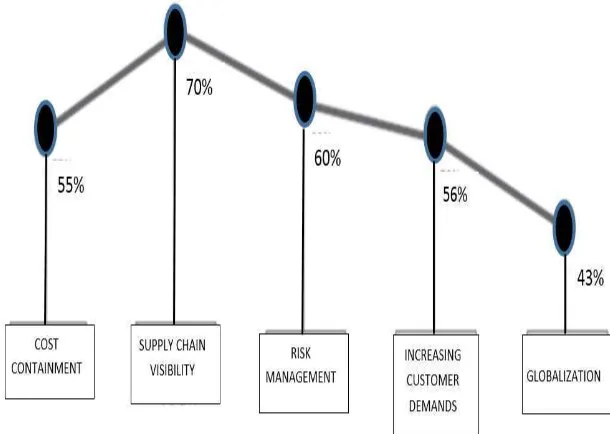
mengaki-batkan guncangan besar terhadap rantai pasokan. Lima tantangan menurut
la-poran ini adalah: (1) cost containment: perubahan harga cepat dan terus terjadi
mengguncang dan melemahkan kekuatan rantai pasokan dalam beradaptasi, (2)
visibility: membanjirnya informasi membuat pengambil keputusan berjuang
un-tuk memahami dan bertindak atas informasi yang akurat dan tepat, (3) risk:
manajemen risiko merupakan agenda penting setiap pengambil keputusan dalam
rantai pasokan, (4) customer intimacy: meskipun prinsip demand-driven sudah
meluas penggunaannya, perusahaan biasanya mempunyai hubungan yang lebih
baik terhadap pemasok dibandingkan dengan pelanggannya, dan (5)
globaliza-tion: berbeda dengan alasan semula, ternyata globalisasi terbukti lebih pada
pertumbuhan pendapatan dibandingkan penghematan biaya. Menurut laporan
ini, para pengambil keputusan mempersepsikan kelima tantangan di atas
memen-garuhi rantai pasokan dengan tingkat yang berbeda, seperti terlihat pada Gambar
2.7 berikut ini.
Untuk menghadapi tantangan tersebut, salah satu upaya adalah dengan
membangun dan menerapkan Smarter Supply Chain. Hal ini dicapai dengan
menggunakan tiga konsep yakni: (1) instrumented - informasi yang
sebelum-nya diciptakan oleh manusia berubah menjadi machine-generated, penggunaan
teknologi akan semakin meluas yang dilengkapi dengan sensor cerdas, (2)
inter-connection - rantai pasokan secara keseluruhan saling terkait yang
Gambar 2.7 Lima Tantangan Teratas Rantai Pasokan Global (IBM, 2010)
besama-sama, dan (3) smart - sistem yang lebih cerdas akan mampu mengambil
keputusan secara otomatis tanpa campur tangan manusia.
Dengan menerapkan sistem lebih cerdas ini, perusahaan dapat
meningkat-kan level visibility sepanjang rantai nilai untuk beradaptasi dengan perubahan
lingkungan dan mengantisipasi kebutuhan mendesak, yang dikenal dengan sistem
Business Intelligence. Sistem ini dapat meningkatkan berbagai kinerja rantai
pa-sokan terkait dengan pengiriman barang dan material, pengurangan stok, waktu
siklus pemenuhan permintaan, akurasi prediksi, produktivitas secara keseluruhan,
penurunan biaya rantai pasokan, tingkat pemenuhan, dan realisasi kapasitas.
De-ngan demikian, maka proses integrasi antar pemain dalam rantai pasokan dapat
dibangun.
untuk mengurangi risiko yang disebabkan berbagai faktor. Chopra dan Sodhi
(Chopra dan Sodhi, 2004), Kleindorfer dan Saad (Kleindorfer dan Saad, 2005),
Rice dan Caniato (Rice dan Caniato, 2003), serta Sheffi (Sheffi, 2005)
menge-mukakan enam jenis risiko dalam rantai pasokan yang harus diatasi dengan
me-nerapkan fleksibilitas. Keenam risiko yang dimaksud adalah: supply risks, process
risks, demand risks, intelectual property risks, behavioral risks, dan political/social
risks. Terdapat dua ukuran umum dari risiko yakni: kemungkinan terjadinya
pe-ristiwa buruk dan implikasi negatif dari pepe-ristiwa tersebut. Bogataj dan Bogataj
(Bogataj dan Bogataj, 2007) mengembangkan pendekatan program linier
parame-ter untuk mengukur risiko rantai pasokan dalam hal gangguan penundaan
peng-iriman barang. Sejumlah peristiwa yang tidak diinginkan terkait dengan risiko
pasokan, proses, dan permintaan (termasuk peningkatan harga dalam rantai
pa-sokan, penurunan kemampuan rantai papa-sokan, ketimpangan antara permintaan
dalam perkiraan dengan permintaan aktual, dan lain-lain). Untuk mengatasi
risiko yang pertama terdapat dua mekanisme yang efektif yakni: berdasarkan
pada konsep menghindarkan risiko dan berdasarkan sejumlah prinsip Total
Qua-lity Management (TQM). Tang dan Tomlin (Tang dan Tomlin, 2008) lebih jauh
menawarkan strategi fleksibilitas dalam risiko biaya pasokan melaluimuliple
sup-pliers, risiko komitmen pasokan melalui kontrak pasokan yang fleksibel, risiko
proses melalui proses manufaktur yang fleksibel, serta risiko permintaan melalui
2.6 Transshipment dalam Rantai Pasokan
Inventory transshipment merupakan salah satu strategi yang menjanjikan
dalam memberikan fleksibilitas operasional untuk menghadapi akibat dari
per-mintaan tak pasti yang pada akhirnya dapat mengurangi biaya persediaan (Lien
et al., 2011). Transshipment antar pemain dalam eselon yang setingkat dalam
rantai pasokan dimaksudkan untuk (1) meningkatkan kemampuan memberikan
respon atas permintaan pelanggan, (2) memberikan fleksibilitas untuk
penyesua-ian siklus produksi dan pengiriman. Penelitpenyesua-ian tentangtransshipment fokus pada
keputusan operasional pada desain jaringan tetap : jumlah yang diperoleh melalui
transshipment antar lokasi dalam satu eselon dan jumlah yang diterima dari
pe-masok pada setiap lokasi. Herer et al. (Herer et al., 2006), meneliti masalah
transshipment dengan mempertimbangkan lokasi dengan variasi pada
perminta-an dperminta-an parameter biaya.
Selanjutnya, Taragas dan Vlachos (Taragas dan Vlachos, 2002) meneliti
kemungkinan waktu tunda replenishment adalah satu, sementara waktu tunda
transshipment dapat diabaikan dalam satu periode. Herer et al. (Herer et al.,
2006) membandingkan lima konfigurasi berbeda dalam kemampuantransshipment
dan menunjukkan nilaitransshipment pada masing-masing lokasi. Sementara Yu
et al. (Yu et al., 2005) meneliti jaringan transshipment dengan satu pemasok dan
tigaretailers dan membahas enam rancangan jaringan yang mungkin, yang
jaringan dari Van Mieghen dan Rudi (Mieghen dan Rudi, 2002) untuk menentukan
jumlah optimalretailer untuk tingkat fleksibilitas tertentu serta menganalisis
in-teraksi antara optimisasi jumlah pesanan dan peningkatan fleksibilitas
operasio-nal.
Chou et al. (Chou et al., 2006) memperkenalkan pendekatan/kerangka
yang robust untuk menganalisis sistem distribusi dengan strategi transshipment.
Mereka menunjukkan efisiensi komputasi untuk jaringan distribusi skala besar
dengan menganalisis dampak transshipment pada pengurangan biaya dari
sis-tem distribusi dengan berbagai konfigurasi dan karakteristik dari retailer.
Se-cara khusus, mereka menganalisis dua jenis konfigurasi yakni garis dan lingkaran
dengan membandingkan biaya penyimpanan, biaya transshipment dikaitkan
de-ngan jumlah permintaan baik untuk retailer yang homogen dan non-homogen.
Berdasarkan pengujian yang mereka lakukan diperoleh bahwa penghematan
bi-aya melaluitransshipment cukup substansial jika biaya penyimpanan lebih besar
dibandingkan dengan biayatransshipment dalam sistem distribusi yang besar.
Se-lanjutnya keuntungan yang diperoleh pada konfigurasi lingkaran lebih signifikan
dibandingkan dengan konfigurasi garis.
Tujuan dari masalah operasionaltransshipment adalah meminimumkan
eks-pektasi biaya per periode untuk sebuah desain jaringan dengan menggunakan
Par. Keterangan
N Himpunan lokasi retailer (nodes) i∈ {1, . . . ,N} K Himpunan link transshipment berarah (i, j)∈K yang
didefinisikan oleh konfigurasi K⊆(N×N)
ci Biayatransshipment untuk satu unit pada sebuahlink
cs Biaya kekurangan stok untuk satu unit dalam satu periode
ch Biaya penyimpanan satu unit dalam persediaan dalam
satu periode
Peubah keputusan dideskripsikan sebagai berikut (Lien et al., 2011):
Peubah Keterangan
Si Order-up-to level pada lokasi i∈N
Xij Jumlah item untuk dikirimkan melaluitransshipment
pada link (i, j)∈N
Di Peubah acak yang menyatakan permintaan pada lokasi i∈N
dalam satu periode
Ii + Net surplus pada akhir periode (setelah transshipment)
pada lokasii∈N
Ii − Net shortage pada akhir periode (setelahtransshipment)
pada lokasii∈N
Awalnya kita mengoptimalkan X, matriks Xij untuk bentuk umum
order-up-to level, kemudian menunjukkan metode iterasi untuk menemukanorder-up-to
level yang optimal. Dalam setiap periode, untuk vektorS yang merupakan
order-up-to level dan permintaanD, diselesaikan dengan program linier berikut:
subject to:
X
i:(ij)∈N
Xij +Ii+−Ii− =Si−Di,∀i ∈N
X
i:(ij)∈N
Xij ≤Si,∀i ∈N
Xij ≥0,∀(i,j) ∈N
Ii+,−Ii−≥0,∀i ∈N (2.12)
Fungsi objektif – persamaan (2.11)– adalah meminimumkan total biaya
transshipment, kekurangan dan biaya penyimpanan dengan mengetahuiK, S, dan
D. Dengan kendala: (1) semua permintaan dipenuhi melaluireplenishment dan
transshipment atau backlogged; (2) membatasi jumlah transshipment; (3)
per-syaratan non-negatif untuk transshipment, persediaan dan kekurangan.
Penyele-saian model di atas diperoleh dengan menyelesaikan masalah operasional