Diajukan untuk memenuhi salah satu syarat Memperoleh gelar Sarjana Teknik
Jurusan Teknik Mesin
Disusun Oleh:
Nama : Yohanes Boedianto
NIM : 025214002
PROGRAM STUDI TEKNIK MESIN
JURUSAN TEKNIK MESIN
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
Presented as Partial Fulfilment of the Requirements To Obtain the Sarjana Teknik Degree
In Mechanical Engineering
By :
Name : Yohanes Boedianto
NIM : 025214002
MECHANICAL ENGINEERING STUDY PROGRAM
DEPARTMENT OF MECHANICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
yang pernah diajukan untuk memperoleh gelar kesarjanaan di suatu Perguruan Tinggi, dan sepanjang pengetahuan saya juga tidak terdapat karya atau pendapat yang pernah ditulis atau diterbitkan oleh orang lain, kecuali yang telah disebutkan dalam kutipan dan dalam daftar pustaka sebagaimana layaknya karya ilmiah.
Yogyakarta, Agustus 2007 Penulis
Karya ini kupersembahkan untuk :
Jesus Christ, my Sheeperd and my Saviour
Papa dan Mama tercinta
Adik-adikku yang terkasih
Merlyana Soik yang kucintai
dalam upaya menjamin kelancaran kegiatan produksi. Penyokong tersebut adalah perangkat peralatan yang mampu untuk memindahkan ataupun mengangkat bahan, material, hasil, atau unit produksi dari suatu tahapan produksi ke tahapan yang lainnya ataupun dari suatu departemen menuju departemen lainnya. Forklift merupakan salah satu jawaban dari problema tersebut.
Material yang akan diangkat oleh forklift ini dibatasi sampai pada berat maksimum dua ton. Maka peralatan pengangkat didesain sedemikian rupa sehingga mampu menahan beban maksimum pada saat dioperasikan.
A support system is needed to ensure a good production process. One of the supporting systems is a vehicle that can be used to move or lift materials, products or production units from one production stage to another or from one department to another. This vehicle is known as forklift.
Forklift has an ability to lift materials up to 2 tons. So the work equipment must be designed in such a way that it can hold a maximum load capacity.
Esa yang telah melimpahkan berkat dan rahmat-Nya yang besar, sehingga penulis dapat menyelesaikan Tugas Akhir yang berjudul “Perancangan Sistem Pengangkat pada Forklift” sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik di Fakultas Sains dan Teknologi Universitas Sanata Dharma.
Bersamaan dengan ini, penulis juga mengucapkan banyak terima kasih kepada dosen serta rekan-rekan yang telah banyak membantu dalam penyelesaian Tugas Akhir ini, antara lain:
1. Romo Ir. Greg. Heliarko, S.J., S.S., B.S.T., M.A., M.Sc., selaku Dekan Fakultas Sains dan Teknologi Universitas Sanata Dharma.
2. Bapak Budi Sugiharto, S.T., M.T., selaku Ketua Jurusan Teknik Mesin Fakultas Sains dan Teknologi Universitas Sanata Dharma.
3. Bapak R.B. Dwiseno Wihadi, S.T., M.Si., selaku Dosen Pembimbing Akademik sekaligus Dosen Pembimbing Tugas Akhir. Terima kasih banyak untuk masukan-masukan yang sangat membantu penyelesaian Tugas Akhir ini. Dan juga nasihat-nasihat agar menjadi lulusan yang memiliki nilai sumber daya yang lebih.
4. Bapak Ir. Rines Alapan, M.T. dan Bapak Doddy Purwadianto, S.T., M.T., selaku Dosen Penguji. Terima kasih untuk saran dan nasihatnya.
7. Papa Anto Sulistyo dan Mama Sharlota Soik tercinta, terima kasih buat dorongan semangat dan doa-doanya. I love you all.
8. Keluarga Besar Liem Bing Lie, terima kasih buat support dana selama masa kuliah saya. Kiranya Tuhan memberkati kehidupan Anda dan damai sejahtera selalu ada dalam keluarga kita semua.
9. My heart, Merlyana Soik, S.T, terima kasih sudah banyak mendukung dan berdoa buat saya saat saya mengalami saat-saat yang susah. Terima kasih sudah banyak membagi hidup bersama saya. Terima kasih buat cinta dan kasihmu yang nyata dalam hidup saya. I love you so much…!!!
10.Adik-adikku semua (Chandra, Meme, Icha, Putri dan Fredy, Siong, Siana). Terima kasih banyak buat dukungan semangatnya. I love you all.
11.GBI Generasi Baru, tempat di mana saya bertumbuh dan mendapatkan nutrisi rohani yang luar biasa.
12.History Maker (Bang Sam, Eros, Epen, Edy dan Maraden), rumah dan keluarga saya selama di Jogja. Terima kasih sudah berbagi hidup.
Yuki, dkk yang lain), makasih buat doa-doanya.
16.Semua teman-teman TM, terima kasih buat semua bantuannya. Sampai jumpa di dunia kerja ya…
17.Semua pihak yang tidak bisa penulis sebutkan satu per satu.
Penulis menyadari bahwa masih banyak kekurangan dalam penyusunan Tugas Akhir ini, penulis memohon kritik dan saran yang membangun. Penulis memiliki harapan yang sangat besar, semoga Tugas Akhir ini dapat bermanfaat bagi pembaca dan juga bagi perkembangan ilmu pengetahuan.
Yogyakarta, Agustus 2007 Penulis
xiii
DAFTAR ISI
HALAMAN JUDUL ...i
HALAMAN PERSETUJUAN ...ii
HALAMAN PENGESAHAN ...iii
HALAMAN KEASLIAN KARYA ...iv
HALAMAN SOAL ... v
HALAMAN REVISI ...vi
HALAMAN PERSEMBAHAN ...vii
INTISARI ...viii
ABSTRACT ...ix
KATA PENGANTAR ... x
DAFTAR ISI ...xiii
DAFTAR GAMBAR ...xvii
DAFTAR LAMPIRAN ... xx
BAB I. PENDAHULUAN ... 1
1.1. Latar
Belakang ... 1
1.2. Definisi
Forklift... 2
1.3. Jenis-jenis
Forklift... 5
xiv
1.5. Pembatasan
Masalah ... 16
1.6. Prosedur
Perancangan ... 16
BAB II. PERANCANGAN SISTEM PENGANGKAT ... 18
2.1 Peralatan
Kerja
(
Work Equipment
) ... 18
2.1.1 Garpu (
Fork
) ... 18
2.1.1.1 Perhitungan Fork... 18
2.1.1.2 Pemeriksaan Kekuatan Fork ... 24
2.1.1.3 Perhitungan Kait Fork ... 25
2.1.2 Fingerboard ... 31
2.1.3 Tiang (
Mast
)... 34
2.1.3.1 Perencanaan Tiang ... 37
2.1.3.2 Perencanaan Roda Jalan (
Roller
) ... 43
2.1.3.3 Perencanaan Rantai ... 49
2.2
Sistem Hidrolik (
Hydraulic System
) ... 57
2.2.1 Pengertian Dasar ... 57
2.2.2 Komponen-Komponen Sistem Hidrolik ... 59
2.2.2.1 Pembangkit Tenaga... 59
2.2.2.2 Penghasil Tenaga (Aktuator) ... 60
2.2.2.3 Pengontrol Sistem Hidrolik (Katub) ... 61
2.2.2.4 Sistem Distribusi ... 64
xv
2.2.3 Sistem Hidrolik Angkat (
Lift
) dan Miring (
Tilt
) ... 67
2.2.3.1 Diagram Sirkuit Sistem Hidrolik ... 67
2.2.3.2 Silinder Hidrolik ... 69
2.2.3.2.1 Analisis Gaya Pembebanan... 69
2.2.3.2.2 Batang Silinder... 74
2.2.3.2.3 Piston Silinder ... 79
2.2.3.2.4 Tebal Dinding Silinder... 81
2.2.3.2.5 Debit Aliran Sistem Hidrolik ... 84
2.2.3.3 Selang Hidrolik ... 86
2.2.3.4 Pompa Hidrolik ... 89
2.2.3.4.1 Rugi-Rugi pada Instalasi ... 89
2.2.3.4.2 Konstruksi Pompa Hidrolik ... 95
2.2.3.4.3 Pemeriksaan Kekuatan Pompa Roda Gigi ... 97
2.2.3.5 Katub ... 100
2.2.3.6 Fluida Hidrolik ... 103
2.3 Analisis
Cosmos
Work... 103
BAB III. OPERASIONAL DAN PERAWATAN ... 116
3.1. Operasional ... 116
xvi
BAB IV. KESIMPULAN DAN PENUTUP... 123
4.1. Kesimpulan ... 123
4.2. Penutup... 128
DAFTAR PUSTAKA
xvii
Gambar 1.1. Kelas-kelas Powered Industrial Trucks... 3
Gambar 1.2. Komponen Forklift-Truck ... 4
Gambar 1.3. Perbandingan Motor-Truck dan Forklift-Truck ... 4
Gambar 1.4. Jenis-Jenis Forklift ... 7
Gambar 1.5. Macam-Macam Bentuk Peralatan Kerja Garpu ... 9
Gambar 1.6. Bentuk dan Konstruksi Forklift Tipe Linde R20 ... 10
Gambar 1.7. Spesifikasi Dimensi Forklift ... 15
Gambar 1.8. Pengontrolan Sudut dan Kecepatan Kemiringan Tiang ... 15
Gambar 2.1. Dimensi Fork... 19
Gambar 2.2. Proyeksi Horizontal pada Lengkungan Fork... 21
Gambar 2.3. Proyeksi Melintang Lengkungan Fork pada Bidang A-B... 21
Gambar 2.4. Kait Fork ... 26
Gambar 2.5. Penampang Kait A ... 27
Gambar 2.6. Spesifikasi Fingerboard... 31
Gambar 2.7. Model Mast 2 Tingkat ... 35
Gambar 2.8. Model Mast 3 Tingkat ... 36
Gambar 2.9. Penampang Rel Luar ... 37
Gambar 2.10. Posisi Pembebanan pada Rel... 41
xviii
Gambar 2.15. Pompa Hidrodinamik ... 60
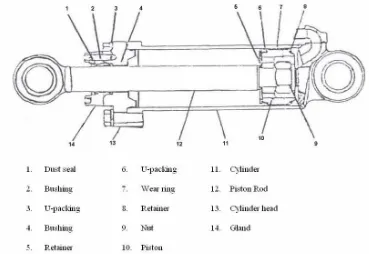
Gambar 2.16. Silinder Hidrolik... 61
Gambar 2.17. Katub Pengarah ... 62
Gambar 2.18. Katub Pengontrol Tekanan... 63
Gambar 2.19. Mekanisme Kerja Sistem Hidrolik Angkat dan Miring ... 68
Gambar 2.20. Tegangan Tali... 69
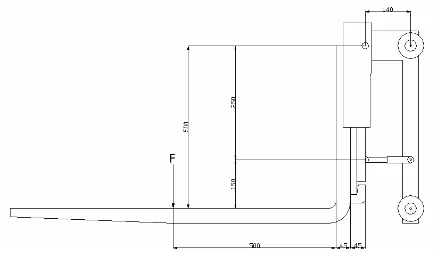
Gambar 2.21. Kedudukan Fork Tegak Lurus Mast ... 71
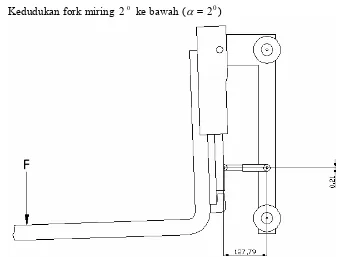
Gambar 2.22. Kedudukan Fork Miring 2° ke Bawah ... 72
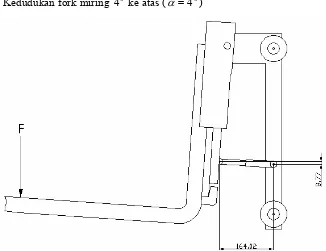
Gambar 2.23. Kedudukan Fork Miring 4° ke Atas ... 73
Gambar 2.24. Silinder Angkat ... 76
Gambar 2.25. Silinder Miring ... 79
Gambar 2.26. Tekanan pada Silinder Angkat ... 80
Gambar 2.27. Tekanan pada Silinder Miring... 81
Gambar 2.28. Pemasangan Selang Hidrolik ... 86
Gambar 2.29. FOS pada fork dan kait dengan pembebanan terpusat ... 104
Gambar 2.30. STRESS pada fork dan kait dengan pembebanan terpusat ... 105
Gambar 2.31. FOS pada fork dan kait dengan pembebanan merata ... 105
Gambar 2.32. STRESS pada fork dan kait dengan pembebanan merata ... 106
xix
Gambar 2.37. FOS pada penutup fingerboard ... 110
Gambar 2.38. STRESS pada penutup fingerboard... 110
Gambar 2.39. FOS pada penghubung/penggantung fingerboard... 111
Gambar 2.40. STRESS pada penghubung/penggantung fingerboard... 112
Gambar 2.41. FOS pada rangkaian penyangga sproket ... 113
Gambar 2.42. STRESS pada rangkaian penyangga sproket ... 113
Gambar 2.43. FOS pada rangkaian total ... 114
Gambar 2.44. STRESS pada rangkaian total ... 115
Gambar 3.1. Manuver Operasi Forklift... 120
Gambar 3.2. Loads Position 1 ... 120
Gambar 3.3. Loads Position 2 ... 120
Gambar 3.4. Raised Fork dan No Lifting... 121
Gambar 3.5. Maintenance Rantai... 121
Gambar 3.6. Maintenance pada Sistem Hidrolik ... 121
xx
Tabel L.1. Baja karbon konstruksi mesin dan baja batang yang difinis dingin
Tabel L.2. Bantalan rol silindris
Tabel L.3. Ukuran rantai rol
Tabel L.4. Besi cor kelabu
Tabel L.5. Ukuran standar ulir kasar metris (JIS B 0205)
Tabel L.6. Tekanan permukaan yang diizinkan pada ulir
Tabel L.7. Ukuran diameter pipa
Tabel L.8. Tekanan zat cair dalam pipa (DIN 2391)
Tabel L.9. Kecepatan kritis pada pipa
Tabel L.10. Diagram Moody
Tabel L.11. Faktor dinamis
Tabel L.12. Tegangan lentur yang diizinkan pada bahan roda gigi
Tabel L.13. Faktor bentuk gigi
1 1. 1. Latar Belakang
Perkembangan dunia industri sedemikian pesatnya. Teknologi yang semakin maju ini secara otomatis mendorong laju produksi menjadi semakin besar pula. Hal tersebut juga sejalan dengan permintaan pasar terhadap hasil produksi yang semakin tinggi pula.
Dalam unit kegiatan produksi beserta prosesnya memerlukan penyokong dalam upaya menjamin kelancaran kegiatan produksi. Penyokong tersebut adalah perangkat peralatan yang mampu untuk memindahkan ataupun mengangkat bahan, material, hasil, atau unit produksi dari suatu tahapan produksi ke tahapan yang lainnya ataupun dari suatu departemen menuju departemen lainnya.
Apabila kita amati secara cermat menurut klasifikasi kerjanya, peran forklift dalam dunia industri menjadi demikian penting dan signifikan untuk dipergunakan sebagai peralatan penyokong proses produksi.
1. 2. Definisi Forklift
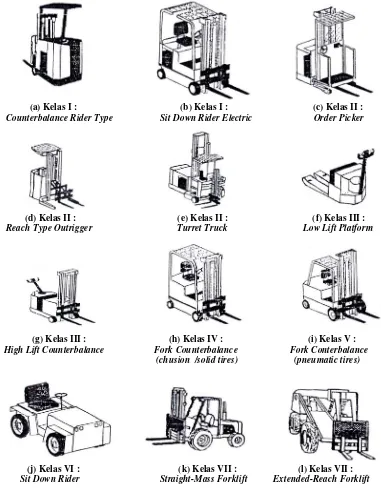
Forklift merupakan salah satu kelas dari klasifikasi powered industrial truck. Menurut The Industrial Powered Truck Association, klasifikasi dari
powered industrial truck seperti yang diperlihatkan pada Gambar 1.1 adalah: a. Kelas I : electric motor rider trucks
b. Kelas II : electric motor narrow aisle trucks
c. Kelas III : electric motor hand trucks or hand / rider trucks
d. Kelas IV : internal combustion engine trucks (solid / cushion tires)
e. Kelas V : internal combustion engine trucks (pneumatic tires)
f. Kelas VI : electric / internal combustion engine tractors
g. Kelas VII : rough terrain forklift trucks
Forklift seringkali juga disebut counterbalance-truck sebagai peralatan angkat dan angkut dengan menggunakan tenaga mesin (internal combustion) ataupun motor listrik (electric motor), dikendalikan oleh seorang operator yang telah terlatih. Forklift mampu dipergunakan di dalam ruangan (indoors) maupun di luar ruangan (outdoors) serta mempunyai kegunaan untuk :
b. Menimbun material (stack materials)
c. Menarik atau mendorong pesawat terbang ataupun kereta gandeng yang berisi bahan baku (tow or push aircraft or material transport trailers)
(a) Kelas I : (b) Kelas I : (c) Kelas II :
Counterbalance Rider Type Sit Down Rider Electric Order Picker
(d) Kelas II : (e) Kelas II : (f) Kelas III :
Reach Type Outrigger Turret Truck Low Lift Platform
(g) Kelas III : (h) Kelas IV : (i) Kelas V :
High Lift Counterbalance Fork Counterbalance Fork Conterbalance
(chusion /solid tires) (pneumatic tires)
(j) Kelas VI : (k) Kelas VII : (l) Kelas VII :
Sit Down Rider Straight-Mass Forklift Extended-Reach Forklift
Gambar 1.1 Kelas-kelas Powered Industrial Trucks
Forklift juga merupakan suatu peralatan pengangkat dan pengangkut yang terbagi atas badan (truck-body) serta peralatan kerja (work equipment) seperti yang diperlihatkan pada Gambar 1.2. Forklift pada hakekatnya serupa dengan motor-truck, tetapi hal yang membedakan adalah Forklift membawa muatannya di bagian peralatan kerja (work equipment)-nya, sedangkan motor-truck membawa muatan pada bagian badan (body)-nya seperti yang diperlihatkan pada Gambar 1. 3.
a.) b.)
Gambar 1.2 Komponen forklift-truck a.) Work equipment b.) Truck body
(Sumber : ____,Diktat-diktat Forklift, PT. United Tractors Pandu Engineering)
a.) b.)
Gambar 1.3 Perbandingan motor-truck dan forklift-truck a.) Motor-truck b.) Forklift-truck
1. 3. Jenis-jenis Forklift
Forklift menurut mesin penggerak (power drive) yang dipergunakan dapat dibagi menjadi dua macam yaitu :
a. Internal Combustion (I/C) Forklift
Forklift ini menggunakan jenis bahan bakar gas / LPG (Liquid Petrolium Gas), bensin (gasoline), atau solar (diesel).
b. Electric (Motor) Forklift
Forklift ini menggunakan jenis motor arus searah (DC) atau arus bolak-balik (AC).
Forklift dalam konstruksinya dilengkapi dengan peralatan kerja (mast and attachment). Forklift memiliki beberapa bentuk attachment sesuai dengan fungsinya dalam memindahkan jenis muatan yang ingin dipindahkan. Hal ini seperti yang diperlihatkan pada Gambar 1.4 , yaitu sebagai berikut :
a. Forklift dengan pencekam ganda b. Forklift dengan klem
1) Klem penjepit muatan bal hidrolik 2) Klem penjepil rol vertikal
3) Klem pengangkat tong 4) Klem keranjang
c. Forklift dengan perlengkapan crane
1) Crane kait tunggal sederhana 2) Crane kait tunggal
3) Crane dengan lengan pengangkat d. Forklift dengan garpu
1) Garpu tunggal / tanduk
2) Garpu ganda untuk pipa keramik dan beton kecil 3) Garpu khusus pencekam pipa beton besar 4) Garpu pengangkat tinggi
5) Garpu pembalik
6) Garpu ganda untuk membawa drum dalam posisi horizontal e. Forklift dengan cengkeraman
1) Cengkeraman pengatur rol dalam arah vertikal 2) Cengkeraman untuk muatan curah
f. Forklift dengan sebuah permukaan yang rata (pelantak) sebagai pendorong beban universal.
g. Forklift dengan pemegang magnetis h. Forklift dengan hooper
Gambar 1.4 Jenis-jenis forklift
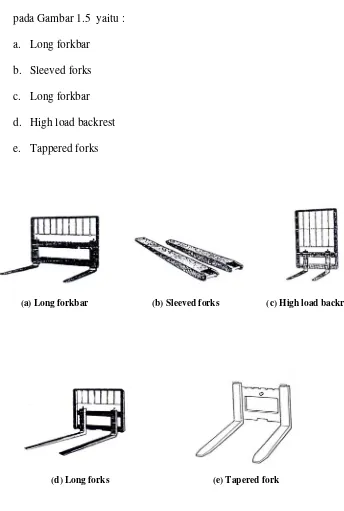
Apabila forklift menggunakan perlatan kerja berbentuk garpu (fork), ada beberapa macam bentuk fork yang digunakan seperti yang diperlihatkan pada Gambar 1.5 yaitu :
a. Long forkbar b. Sleeved forks c. Long forkbar d. High load backrest e. Tappered forks
(a) Long forkbar (b) Sleeved forks (c) High load backrest
(d) Long forks (e) Tapered fork
Gambar 1.5 Macam-macam bentuk peralatan kerja garpu
1. 4. Dimensi Forklift
Forklift memiliki konstruksi dasar yang hampir sama, hanya dimensinya saja yang berbeda. Berikut dapat dilihat konstruksi forklift yang termasuk dalam powered industrial trucks kelas II yaitu forklift dengan tipe ‘Reach Type Outrigger’ dan sistem penggerak berupa electric motor rider trucks. Peralatan kerja (attachment) dipilih berupa garpu (tapered forks) yang dipergunakan untuk mengangkat dan memindahkan material berbentuk kotak ataupun material lain dengan pallet dan dipasang pada tiang (mast) dua tingkat. Forklift ini digunakan di dalam ruangan (indoors).Konstruksi forklift tersebut dapat dilihat pada Gambar 1.6
Gambar 1.6 Bentuk dan konstruksi forklift tipe Linde R20
Bagian-bagian dari forklift tersebut adalah : 1. Mast unit
2. Lift cylinder
3. Protection screen
4. Control panel cover
5. Battery connector
6. Battery
7. Lift motor and pump unit
8. Hydraulic tank
9. Load wheels
10.Hydraulic control valve
11.Reach roller
12.Drive wheel
13.Gearbox
14.Reach jack
15.Traction motor
16.Horn
17.Brake fluid reservoir
18.Seat mounting
19.Traction motor brake
20.Power steering motor / gearbox / controller
21.Seat
22.Steering wheel
23.Lift chain
24.Fork latches
25.Forks
26.Fork carriage
27.Sideshift jack
1. Gradeability
Kemiringan maksimum jalan yang masih bisa dilalui forklift yang mengangkut beban dengan bobot standar.
2. Forklift lifting speed
Kecepatan angkat garpu tanpa dan dengan adanya beban standar, dinyatakan dalam satuan mm/sec (millimeter/detik).
3. Forklift lowering speed
Kecepatan turun garpu tanpa dan dengan adanya beban standar, dinyatakan dalam satuan mm/sec (millimeter/detik).
4. Free lift
Jarak dari permukaan tanah (ground) ke garpu dengan rel /tiang (mast) berada pada posisi tegak lurus.
5. Load center
Jarak dari titik pusat beban ke garpu bagian depan ketika diberi beban maksimum.
6. Maximum lifting height
Jarak ketinggian maksimum dari permukaan tanah ke permukaan garpu pada saat garpu dinaikkan maksimum. Tiang / rel harus dalam keadaan tegak lurus dengan standar beban pada load centernya.
7. Maximum load
Gaya tarik maksimum dengan standar beban arah maju, dinyatakan dalam satuan kilogram (kg).
9. Maximum turning radius
Setengah dari diameter lingkaran pada saat forklift berbelok tajam.
Turning radius akan semakin kecil jika kemampuan membelok (turning ability) forklift semakin besar.
10.Mast tilting angle
Sudut kemiringan dari rel / tiang yang dapat digerakkan ke depan maupun ke belakang.
11.Mast tilting speed
Kecepatan dari tiang pada saat digerakkan hingga mencapai kemiringan maksimum.
12.Minimum intersecting aisle / stacking aisle width
Lebar minimum dari jalan (gang) ketika forklift masih dapat berbelok. Semakin kecil minimum intersecting aislenya akan menyebabkan forklift mampu beroperasi pada lokasi (misalnya gudang) yang kecil.
13.Minimum under clearance
Ketinggian dari permukaan tanah atau lantai ke bagian terendah dari forklift. Pada umumnya merupakan jarak bagian bawah tiang, tidak termasuk garpu dan ban.
14.Overall height
15.Overall length
Ukuran panjang diukur dari ujung garpu paling depan ke bagian paling belakang dari forklift.
16.Overall width
Ukuran lebar yang diukur dari bagian forklift yang paling menonjol dari kedua sisinya.
17.Service weight
Ukuran berat total dari forklift tetapi tidak termasuk operator. Untuk forklift dengan internal combustion, service weight sudah termasuk dengan bahan bakar, air pendingin, dan pelumas.
18.Tread
Jarak tengah antara ban kiri dan kanan. Jika tread semakin pendek lebar forklift akan semakin pendek pula dan mengakibatkan keseimbangan forklift berkurang. Tread dibuat sependek mungkin tanpa mengganggu keseimbangannya.
19.Wheel base
Jarak mendatar / horizontal dari titik pusat poros depan (front axle) ke titik pusat poros belakang (rear axle). Apabila wheel base semakin panjang maka keseimbangan forklift akan semakin baik, tetapi radius untuk membelok (turning radius)nya akan semakin besar. Wheel base
(a) Gradeability (b) Free lift (c) Load center (d) Maximum (e) Maximum lifting height load
(f) Minimum under (g) Maximum turning (h) Minimum intersecting (i) Overall height clearance radius aisle
(j) Overall length (k) Overall width (l) Tread (m) Service weight (n) Wheel base
Gambar 1.7 Spesifikasi dimensi forklift
(Sumber : ____, Diktat-diktat Forlift,PT. United Tractors Pandu Engineering)
(a) Sudut miring ke depan (b) Sudut miring ke belakang
Gambar 1.8 Pengontrolan sudut dan kecepatan kemiringan tiang
1. 5. Pembatasan Masalah
Tugas akhir ini dalam pembahasan, perancangan, dan perhitungan akan bertitik berat pada beberapa hal. Selain dari hal tersebut, tidak akan dibahas secara lengkap. Hal- hal yang menjadi titik berat dalam Tugas Akhir ini adalah :
1. Perancangan difokuskan hanya pada perancangan sistem pengangkat pada forklift. Yang termasuk di dalamnya adalah perancangan garpu (fork), perancangan fingerboard, perancangan tiang (mast), perancangan sistem hidrolik.
2. Sistem pengangkat ini mampu mengangkat beban dengan berat maksimum 2 ton.
1. 6. Prosedur Perancangan
Langkah-langkah dalam proses pembahasan dan perancangan komponen-komponen dari sistem pengangkat pada forklift adalah sebagai berikut :
1. Penyajian latar belakang Tugas Akhir yang bertema forklift, kemudian dilanjutkan dengan membahas definisi forklift, jenis-jenis forklift dan spesifikasi dimensi forklift yang umum dipergunakan. Setelah itu baru ditentukan mengenai pembatasan masalah dan prosedur perancangannya. 2. Analisis perhitungan pada sistem pengangkat yang akan dirancang
a. Peralatan kerja (work equipment) yang meliputi garpu (fork),
fingerboard, dan tiang (mast). Akan disajikan mengenai definisi dan perhitungan perancangan masing-masing komponen tersebut.
b. Sistem hidrolik beserta komponen-komponen dalam sistem hidrolik, dan pembahasan mengenai sistem hidrolik untuk angkat (lift) dan sistem hidrolik untuk miring (tilt). Dalam hal ini juga meliputi penggerak hidrolik, yaitu mengenai definisi dan komponen-komponen pompa hidrolik sebagai penyuplai tenaga dalam sistem pengangkat pada forklift ini.
c. Penyajian hasil analisis perhitungan dengan menggunakan program “Cosmos Work” sebagai acuan pembanding terhadap hasil analisis perhitungan manual.
3. Pembahasan mengenai operasional dan perawatan dari sistem pengangkat pada forklift. Operasional yang dimaksud adalah meliputi prosedur-prosedur dalam mengoperasikan sistem pengangkat pada forklift, serta prosedur-prosedur keamanan dan keselamatan bagi operator ataupun bagi orang lain yang berada dalam lingkup kerja forklift tersebut. Perawatan sistem pengangkat pada forklift akan meliputi pemeliharaan dan perawatan yang perlu dilakukan.
18
2. 1. Peralatan Kerja (Work Equipment) 2.1.1. Garpu (Fork)
Fork merupakan bagian dari sistem pengangkat forklift yang akan
menerima beban secara langsung. Fork juga merupakan peralatan kerja
forklift yang dapat diganti menurut kebutuhan kerja serta jenis dari beban
yang akan diangkat. Fungsi fork adalah sebagai dudukan dari beban atau
materi yang akan diangkat, yang dapat berupa kotak atau pallet. Dalam
pengoperasiannya, diusahakan agar penempatan beban berada pada pangkal
fork untuk meminimalkan terjadinya kerusakan pada konstruksi fork.
2.1.1.1. Perhitungan Fork
Bahan fork dipilih menggunakan Tabel L.1 dan L.12 pada lampiran,
dengan data yang diketahui adalah:
Bahan fork = S 35 C
Kekuatan tarik bahan σB = 52 kg/mm2
Tegangan lentur izin bahan bahan σa = 26 kg/mm2
Kapasitas angkat maksimum Q = 2000 kg
Jumlah fork = 2
Setiap batang fork menerima beban kerja masing-masing (seperti yang
Q 2 1
F= × ... (2.1)
1000 2000 2 1
F= × = kg
Gambar 2.1 Dimensi Fork
Angka keamanan merupakan angka yang digunakan untuk mengevaluasi keamanan dari suatu bagian mesin. Angka keamanan yang diambil Sf = 1,5. Beban patah pada batang fork dapat ditentukan dengan menggunakan persamaan 2.2.
F Sf
Ff = × ... (2.2)
1500 1000 1,5
Ff = × = kg
Penampang A-B seperti yang terlihat pada Gambar 2.1 akan mengalami
pembebanan kombinasi dan akan menghasilkan tegangan dalam berupa
tegangan tarik dan lentur akibat beban patah.
1. Tegangan tarik akibat beban patah dapat ditentukan dengan
menggunakan persamaan 2.3.
A F
σ f
b = ... (2.3)
b a
Persamaan 2.4 dimasukkan dalam persamaan 2.3, menjadi:
b a
F
σ f
b = ×
Dengan: A = luas penampang fork (mm²)
a = tebal fork (mm)
b = lebar batang fork (mm)
Sehingga:
b 33,33 b
45 1500
σb = × = kg/mm²
2. Tegangan lentur beban lengkung
Untuk menganalisis tegangan lentur pada fork, perlu dilakukan proyeksi
melintang pada batang fork dengan penentuan titik-titik kelengkungan
pada fork seperti yang diperlihatkan pada Gambar 2.2 dan Gambar 2.3
(Shigley dan Mitchell, 1986, halaman 82).
Dengan: a = tebal fork = 45 mm
b = lebar batang fork (mm)
Co = jarak dari sumbu netral ke serat luar (mm)
Ci = jarak dari sumbu netral ke serat dalam (mm)
e = jarak dari sumbu titik berat ke sumbu netral (mm)
r = jari-jari sumbu netral (mm)
ro = jari-jari serat luar (mm)
ri = jari-jari serat dalam = 20 mm
Gambar 2.2 Proyeksi horizontal pada lengkungan fork
(Sumber :Shigley dan Mitchell, 1986, halaman 82)
Gambar 2.3 Proyeksi melintang lengkungan fork pada bidang A-B
a. Jari-jari kelengkungan serat luar (ro) ditentukan oleh persamaan 2.5
(Shigley dan Mitchell, 1986, halaman 85).
a ri
ro= + ... (2.5)
65 45 20
ro= + = mm
b. Jari-jari kelengkungan sumbu netral (r) ditentukan oleh persamaan
2.6 (Shigley dan Mitchell, 1986, halaman 86).
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ =
ri ro ln
a
38,18 20 65 ln 45 r = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = mm
c. Jari-jari kelengkungan titik berat (r) ditentukan oleh persamaan 2.7
(Shigley dan Mitchell, 1986, halaman 86).
2 a ri
r= + ... (2.7)
42,5 2
45 20
r= + = mm
d. Jarak dari sumbu titik berat ke sumbu netral (e) ditentukan oleh
persamaan 2.8 (Shigley dan Mitchell, 1986, halaman 85).
r r
e= − ... (2.8)
4,32 38,18 42,5
e= − = mm
e. Jarak dari sumbu netral ke serat luar (Co) ditentukan oleh persamaan
2.9 (Shigley dan Mitchell, 1986, halaman 85).
a 2 1 e
Co= + × ... (2.9)
26,82 45
2 1 4,32
Co= + × = mm
f. Jarak dari sumbu netral ke serat dalam (Ci) ditentukan oleh
persamaan 2.10 (Shigley dan Mitchell, 1986, halaman 85).
e a
Ci= × −
2 1 ... (2.10) 18 , 18 32 , 4 45 2
1× − =
=
Momen lengkung yang terjadi pada fork dapat ditentukan dengan oleh
persamaan 2.11
(
Ci)
F
M = f × 500+ ... (2.11)
(
500 18,18)
7772701500× + =
=
M kg.mm
Tegangan lentur akibat momen lentur ditentukan oleh persamaan 2.12
dan persamaan 2.13 (Shigley dan Mitchell, 1986, halaman 85).
Pada titik A
ri e A
Ci M
aA × ×
× =
σ ... (2.12)
b b aA 46 , 3634 20 32 , 4 . 45 18 , 18 777270 = × × × = σ kg/mm²
Pada titik B
ro e A
Co M
aB × ×
× =
σ ... (2.13)
b b aA 76 , 1649 65 32 , 4 . 45 82 , 26 777270 = × × × = σ kg/mm²
3. Total tegangan yang terjadi pada batang fork
a. Tegangan tarik dan lentur tarik ditentukan oleh persamaan 2.14
(Suroto, A.,halaman 30).
b aA
maks σ σ
σ = + ... (2.14)
b b b maks 79 , 3667 33 , 33 46 , 3634 = + =
σ kg/mm²
b. Tegangan tarik dan lentur tekan ditentukan oleh persamaan 2.15
(Suroto, A.,halaman 30).
b
aB σ
σ
σmin =− + ... (2.15)
b b b 09 , 1683 33 , 33 76 , 1649
min =− + =
Persyaratan yang harus dipenuhi adalah bahwa tegangan yang terjadi
pada batang fork harus lebih kecil daripada kekuatan tarik bahan
sehingga fork aman dipergunakan. Maka batang fork memiliki lebar
sebagai berikut :
σB≥σmaks
52 ≥
b
79 , 3667
b ≥ 70,53 mm
Lebar fork dipilih = 100 mm
(disesuaikan dengan data manual book Linde R20)
2.1.1.2. Pemeriksaan Kekuatan Fork
Kekuatan fork dapat dibuktikan dengan mencari harga tegangan
yang terjadi pada fork dengan langkah berikut ini :
1. Tegangan akibat momen lentur ditentukan oleh persamaan 2.16 dan
persamaan 2.17 (Shigley dan Mitchell, 1986, halaman 52).
z M
a =
σ ... (2.16)
6
2 a b
z= × ... (2.17)
dengan : M = momen lentur (kg.mm)
z = modulus penampang (mm³)
sehingga :
33750 6
45
100× 2 =
=
03 , 23 33750 777270
= =
a
σ kg/mm²
2. Tegangan tarik akibat beban patah ditentukan oleh persamaan 2.3
33 , 0 100 45
1500 =
× =
b
σ kg/mm²
3. Tegangan total yang dialami fork ditentukan oleh persamaan 2.18
(Suroto, A.,halaman 30).
a b
result σ σ
σ = + ... (2.18)
36σresult =0,33+23,03=23, kg/mm²
Karena didapatkan hasil bahwa tegangan terbesar yang dialami fork
adalah tegangan lenturnya, maka keamanan konstruksi ditinjau dari
tegangan lentur izin bahan.
σa≥σresult
26 ≥ 23,36
Didapatkan bahwa tegangan lentur izin bahan lebih besar daripada
tegangan yang terjadi pada batang fork, sehingga fork aman untuk
digunakan.
2.1.1.3. Perhitungan Kait Fork
Bahan kait fork dipilih sama dengan bahan fork yang dipilih
menggunakan Tabel L.1 pada lampiran, dengan data sebagai berikut :
Bahan kait fork = S 25 C
Kekuatan tarik bahan σB = 45 kg/mm2
Angka keamanan Sf = 1,5
Analisis gaya-gaya yang terjadi pada kait fork seperti diperlihatkan pada
Gambar 2.4 menggunakan analogi bahwa kait A merupakan tumpuan sendi
dan kait B merupakan tumpuan rol.
Gambar 2.4 Kait fork
Analisis gaya di titik A dan B ditentukan dengan persamaan berikut :
Gaya horizontal :
0
= ∑MB
(
500+45)
− ×440=0× FAH
F
(
500 45)
440 01000× + −FAH × =
64 , 1238 440
545
1000× =
=
AH
F kg
0
=
∑F
0
=
− BH
AH F
F
64 , 1238
=
BH
F kg
Gaya vertikal :
1000
= =F
FAV kg
0
=
BV
Berdasarkan perhitungan tersebut maka dapat diketahui bahwa kait A
mengalami pembebanan yang lebih besar disbanding kait B. maka yang
akan dianalisis adalah kait A saja. Berikut adalah perhitungan kait A dengan
konstruksi seperti diperlihatkan pada Gambar 2.5.
Gambar 2.5 Penampang kait A
Karena ∑FX =0, maka FAH’ pada Gambar 2.5 besarnya sama dengan FAH
pada Gambar 2.4, yaitu 1238,64 kg.
Penampang X-X’
Kait secara langsung menerima gaya beban dari fingerboard dengan harga
seperti yang telah dihitung di atas, dengan ketentuan beban berada di tengah
dari kait fork.
1. Tegangan lentur akibat momen lentur (Shigley dan Mitchell, 1986,
halaman 52).
⎟ ⎠ ⎞ ⎜
⎝ ⎛ + × =
2 25 15 AH
H F
M
60 , 34062 2
25 15 64 ,
1238 ⎟=
⎠ ⎞ ⎜
⎝ ⎛ + × =
H
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ × = 2 25 AV V F M 12500 2 25
1000 ⎟=
⎠ ⎞ ⎜ ⎝ ⎛ × = V
M kg.mm
Sehingga momen resultannya adalah :
H V
result M M
M = +
60Mresult =34062,60+12500=46562, kg.mm
Momen inersia penampang kait ditentukan oleh persamaan 2.19.
3
12 1
h b
I = × × ... (2.19)
Dengan : b = lebar kait = 100 mm
h = tebal kait = 25 mm
Sehingga :
33 , 130208 25 100 12
1 × × 3 =
=
I mm4
Tegangan lentur ditentukan oleh persamaan 2.20.
I C Mresult a × =
σ ... (2.20)
Dengan : 25 12,5
2
1× =
=
C mm
Sehingga : 4,47
33 , 130208 5 , 12 60 ,
46562 × =
=
a
σ kg/mm2
2. Tegangan tarik akibat gaya horizontal ditentukan oleh persamaan 2.3.
A FAH
b =
σ
Sehingga : 0,5 25 100 64 , 1238 = × = b
σ kg/mm2
Tegangan normal maksimum ditentukan oleh persamaan 2.21 (Suroto,
A.,halaman 30).
a b
total σ σ
σ = + ... (2.21)
97 , 4 47 , 4 5 ,
0 + =
=
total
σ kg/mm2
3. Tegangan geser maksimum akibat gaya vertikal ditentukan oleh
persamaan 2.22 (Shigley dan Mitchell, 1986, halaman 64).
A FAV × × = 2 3
τ ... (2.22)
(
25 100)
0,6 2 1000 3 = × × × =τ kg/mm2
Tegangan maksimum total yang terjadi akibat tegangan tarik dan tegangan
geser ditentukan oleh persamaan 2.23 (Suroto, A.,halaman 25).
2 2
max σ 3τ
σ = total + ... (2.23)
08 , 5 6 , 0 3 97 ,
4 2 2
max = + × =
σ kg/mm2
Penampang Y-Y’
1. Tegangan lentur akibat momen lentur.
Momen inersia penampang kait ditentukan oleh persamaan 2.19.
67 , 66666 20 100 12
1 × × 3 =
=
I mm4
Dengan : 20 10
2
1× =
=
C mm
Sehingga : 6,98 67 , 66666 10 60 , 46562 = × = a
σ kg/mm2
2. Tegangan tarik akibat gaya vertikal
0
=
b
σ
Tegangan normal total ditentukan oleh persamaan 2.21.
a b
total σ σ
σ = +
98σtotal =0+6,98=6, kg/mm2
3. Tegangan geser akibat gaya vertikal ditentukan oleh persamaan 2.22.
(
)
0,93100 20 2 64 , 1238 3 = × × × =
τ kg/mm2
Tegangan maksimum total yang terjadi akibat tegangan tarik dan tegangan
geser ditentukan oleh persamaan 2.23.
16 , 7 93 , 0 3 98 ,
6 2 2
max = + × =
σ kg/mm2
Tegangan tarik bahan yang diizinkan ditentukan oleh persamaan 2.24.
Sf
B b
σ
σ = ... (2.24)
30 5 , 1 45 = = b
σ kg/mm2
Persyaratan yang harus dipenuhi adalah bahwa tegangan maksimal yang
terjadi pada kait fork, tepatnya pada kedua penampang yang dianalisa (X-X’
dan Y-Y’) harus lebih kecil daripada tegangan tarik bahan. Sehingga dapat
diperoleh hasil sebagai berikut :
Tegangan maksimal penampang Y-Y’ : σmax =7,16 kg/mm2
Tegangan yang terjadi pada penampang kait fork masih lebih kecil
dibanding dengan tegangan tarik izin bahan, sehingga kait fork aman untuk
dipergunakan.
2.1.2. Fingerboard
Gambar 2.6 Spesifikasi fingerboard
Bahan fingerboard dipilih berdasarkan Tabel L.1 dan L.12 pada lampiran,
dengan data-data diketahui sebagai berikut :
Bahan fingerboard = S 25 C
Kekuatan tarik bahan σB = 45 kg/mm2
Tegangan lentur izin bahan bahan σa = 21 kg/mm2
Angka keamanan Sf = 1,5
Penampang A-A’ pada Gambar 2.6 merupakan bagian yang mengalami
tegangan paling besar. Momen yang terjadi pada penampang A-A’ adalah :
1. Momen puntir
(
500 45)
5450001000× + =
=
p
2. Momen lentur / lengkung
197000 197
1000× =
=
a
M kg.mm
Tegangan-tegangan yang terjadi pada fingerboard adalah :
1. Tegangan lentur akibat momen lentur ditentukan oleh persamaan 2.20,
dengan beberapa data diketahui sebagai berikut :
Momen lentur M = 197000 kg.mm
Tebal fingerboard b = 20 mm
Lebar fingerboard h = 100 mm
Sehingga :
50 100 2
1× =
= C mm 67 , 1666666 100 20 12
1 × × 3 =
=
I mm4
91 , 5 67 , 1666666 50 197000 = × = a
σ kg/mm2
2. Tegangan geser akibat puntiran ditentukan oleh persamaan 2.25 (Shigley
dan Mitchell, 1986, halaman 435).
J r
M×
=
τ ... (2.25)
Dengan : M = momen puntir (kg.mm)
r = jarak tinjau terhadap sumbu titik berat (mm)
J = momen inersia sudut (mm4)
y
x I
I
J = + ... (2.26)
3
12 1
h b
67 , 1666666 100 20 12
1 × × 3 =
=
x
I mm4
3
12 1
b h
Iy = × × ... (2.26b)
67 , 66666 20 100 12
1 × × 3 =
=
y
I mm4
Maka hasil dari persamaan 2.26a dan 2.26b jika dimasukkan ke dalam
persamaan 2.26 menjadi :
34 , 1733333 67 , 66666 67 ,
1666666 + =
=
J mm4
a. Tegangan geser arah X (arah ke bawah) ditentukan oleh persamaan
2.25 dengan jarak tinjau terhadap titik berat (r) adalah X.
72 , 15 34 , 1733333 2 100 545000 = × = × = J X Mp x
τ kg/mm2
b. Tegangan geser arah Y (arah ke depan) ditentukan oleh persamaan
2.25 dengan jarak tinjau terhadap titik berat (r) adalah Y.
14 , 3 34 , 1733333 2 20 545000 = × = × = J Y Mp y
τ kg/mm2
c. Tegangan geser akibat beban geser.
A F
=
τ dengan A=b×h
5 , 0 100 20 1000 = × =
τ kg/mm2
Tegangan geser total atau resultan ditentukan oleh persamaan 2.27
(
)
2 2x y
result τ τ τ
τ = + + ... (2.27)
(
3,14+0,5)
2 +15,722 =16,14=
result
τ kg/mm2
Tegangan normal yang terjadi ditentukan oleh persamaan 2.28 (Suroto, A.,
halaman 30).
2 2
3 result a
normal σ τ
σ = + ... (2.28)
57 , 28 14 , 16 3 91 ,
5 2 + × 2 =
=
normal
σ
Tegangan tarik bahan yang diizinkan ditentukan oleh persamaan 2.24.
30 5 , 1 45 = = = Sf B b σ σ
Persyaratan yang harus dipenuhi adalah bahwa tegangan normal yang terjadi
pada fingerboard harus lebih kecil dari tegangan tarik izin bahan.
Didapatkan bahwa tegangan normal fingerboard lebih kecil dari tegangan
tarik izin bahan, maka fingerboard tersebut aman untuk digunakan.
Didapatkan pula bahwa tegangan lentur yang terjadi pada fingerboard lebih
kecil dari tegangan lentur izin bahan, maka konstruksi aman dipergunakan.
2.1.3. Tiang (Mast)
Mast merupakan bagian dari forklift yang berfungsi untuk
mengambil, mengangkat, membawa, dan juga sebagai sarana meletakkan
material dari satu tempat pada ketinggian tertentu ke tempat lain dengan
unjuk kerja forklift dan juga sangat berpengaruh terhadap besarnya
produktivitas kerja forklift.
Berdasarkan kebutuhan kerjanya, mast memiliki beberapa model
seperti yang ada pada Gambar 2.7 dan 2.8, yaitu :
1. Tipe 2 tingkat (two-stage type).
Pada tipe 2 tingkat ini juga ada beberapa macam. Perbedaan tersebut
biasanya terletak pada jumlah dan posisi silinder angkat atau silinder
miring, konstruksi rel luar dan rel dalam, jumlah rantai, disesuaikan
dengan fungsi dan tujuan masing-masing jenisnya. Berikut beberapa
contoh mast tipe 2 tingkat :
Gambar 2.7 Model mast 2 tingkat
2. Tipe 3 tingkat (three-stage type).
Sama halnya dengan tipe 2 tingkat, tipe 3 tingkat ini juga ada beberapa
macam. Perbedaan tersebut biasanya terletak pada jumlah dan posisi
silinder angkat atau silinder miring, konstruksi rel luar dan rel dalam,
jumlah rantai, disesuaikan dengan fungsi dan tujuan masing-masing
jenisnya. Berikut beberapa contoh mast tipe 3 tingkat :
Gambar 2.8 Model mast 3 tingkat
(Sumber : ____,Brosur-brosur Forklift, PT. United Tractors Pandu Engineering)
Komponen-komponen mast unit meliputi :
1. Tiang / rel luar (outer mast)
Merupakan tiang yang konstruksinya terpasang pada kerangka depan
forklift. Komponen ini dapat bergerak bebas sehingga mampu bergerak
rotasi membentuk sudut ayun ke depan dan belakang. Fungsi dari kolom
2. Rel dalam (inner mast)
Komponen ini dapat bergerak bebas seiring dengan gerakan dari piston
silinder angkat sepanjang kolom luar.
3. Rantai (chain)
Berfungsi untuk meneruskan gerakan dari silinder angkat dalam
membawa beban.
4. Roda jalan (roller)
Berfungsi untuk memperkecil gesekan antara kolom luar dan kolom
dalam, serta antara kolom dengan fingerboard.
2.1.3.1. Perencanaan Tiang
Tiang / rel luar merupakan bagian yang mengalami tegangan dan
momen yang lebih besar dibanding kolom dalam karena bagian ini
menerima beban dan kerja secara langsung. Konstruksi rel luar diperlihatkan
pada Gambar 2.9
Luasan masing-masing bidang :
3300 20
165
1 = × =
A mm2
(
75 20)
20 11002 = − × =
A mm2
(
75 20)
20 11003 = − × =
A mm2
5500 1100 1100 3300 3 2
1+ + = + + =
= A A A
A mm2
1. Titik berat rel dapat ditentukan oleh persamaan 2.29 dan 2.30
(Sudibyo,B., 1986, halaman 67).
Titik berat Luasan (A)
(mm2)
x (mm) y (mm)
A
x× y×A
3300 10 82,5 33000 272250
1100 47,5 10 52250 11000
1100 47,5 155 52250 170500
5500 ∑ 137500 453750
Sumbu X :
A A x xs ∑ ∑
= . ... (2.29)
25 5500 137500 = = s x mm
Sumbu Y :
A A y ys ∑ ∑
= . ... (2.30)
Momen inersia ditentukan oleh persamaan 2.31 dan 2.32.
Sumbu X :
2 3 3 3 2 2 2 2 2 1 1
1 A y I A y I A y
I
Ix = + × + + × + + × ... (2.31)
7486875 165
20 12
1 3
1 = × × =
I mm4
(
75 20)
20 36666,67 121 3
2 = × − × =
I mm4
(
75 20)
20 36666,67 121 3
3 = × − × =
I mm4
0 2 165 5 , 82
1 = − =
y 5 , 72 2 20 5 , 82
2 = − =
y mm 5 , 72 2 20 5 , 82
3 = − =
y mm
Dengan : y1 = jarak titik berat ke titik berat bidang 1 terhadap sumbu Y
2
y = jarak titik berat ke titik berat bidang 2 terhadap sumbu Y
3
y = jarak titik berat ke titik berat bidang 3 terhadap sumbu Y
Sehingga :
2 2
2 36666,67 1100 72,5 36666,67 1100 72,5
0 3300
7486875+ × + + × + + ×
= x I 34 , 19123958 = x
I mm4
Sumbu Y :
2 3 3 3 2 2 2 2 2 1 1
1 A x I A x I A x
I
Iy = + × + + × + + × ... (2.32)
110000 20
165 12
1 3
1 = × × =
(
75 20)
277291,67 2012
1 3
2 = × × − =
I mm4
(
75 20)
277291,67 2012
1 3
3 = × × − =
I mm4
15 2 20 25
1 = − =
x mm 5 , 22 25 2 55 20
2 = + − =
x mm 5 , 22 25 2 55 20
3 = + − =
x mm
Dengan : x1 = jarak titik berat ke titik berat bidang 1 terhadap sumbu X
2
x = jarak titik berat ke titik berat bidang 2 terhadap sumbu X
3
x = jarak titik berat ke titik berat bidang 3 terhadap sumbu X
Sehingga :
2 2
2 277291,67 1100 22,5 277291,67 1100 22,5
15 3300
110000+ × + + × + + ×
= y I 34 , 2520833 = y
I mm4
2. Kekuatan rel luar
Bahan rel dipilih menggunakan Tabel L.12 pada lampiran, dengan data
diketahui sebagai berikut :
Bahan rel = S 35 C
Tegangan lentur bahan σA = 26 kg/mm2
Kekuatan rel ini akan paling teruji ketika mengalami pembebanan
dengan harga momen maksimum yaitu pada saat tinggi angkat
maksimum.
Momen yang terjadi pada rel luar dengan posisi rel seperti yang
diperlihatkan pada Gambar 2.10.
Gambar 2.10 Posisi pembebanan pada rel
Beban yang bekerja adalah berdasarkan persamaan 2.2
1500
=
f
F kg
1095000 730
1500× =
=
A
M kg.mm
Karena pada forklift tipe Linde R20 mast tidak mengalami posisi miring,
maka dapat diketahui momen maksimum yang terjadi pada rel yaitu :
1095000
max =
M kg.mm
Tegangan pada rel akibat momen lentur ditentukan oleh persamaan :
x s a
I y
M ×
= max
σ
Dengan : ys = titik berat (mm)
x
I = momen inersia sumbu X
Sehingga : 4,72
34 , 19123958
5 , 82
1095000× =
=
a
Persyaratan yang harus dipenuhi adalah bahwa tegangan lentur yang
terjadi pada rel harus lebih kecil daripada tegangan lentur izin bahan,
sehingga :
σa≤σA
4,72 ≤ 26
Diketahui bahwa tegangan lentur yang terjadi pada rel masih lebih kecil
daripada tegangan lentur izin bahan, maka rel hasil perancangan aman
untuk digunakan.
Rel juga akan mengalami beban tekuk. Pemeriksaan tehadap beban
tekuk ditentukan oleh persamaan 2.33 dan 2.34. Dengan persyaratan
bahwa koefisien kerampingan rel harus lebih besar daripada koefisien
kerampingan minimum Euler yaitu pada harga 100 untuk baja.
i Lk
=
λ ... (2.33)
Dengan : Lk =n×L
A I
i= ... (2.34)
Dengan : I = momen inersia (mm4) = 19123958,34 mm4
A = luasan bidang (mm2) = 5500 mm2
λ = koefisien kerampingan
n = faktor pemasangan
Sehingga :
97 , 58 5500
34 ,
19123958 =
=
Dianalogikan bahwa pemasangan rel dengan metode jepit-bebas, oleh
karena itu n = 2 (Sudibyo, B., 1986, halaman 37). Maka :
88 , 157 97
, 58
4655 2
= ×
= λ
Didapatkan bahwa koefisien kerampingan batang rel memiliki harga
lebih besar daripada koefisien kerampingan minimum Euler (yaitu pada
harga 100 untuk baja).
157,88 ≥ 100
Maka memenuhi persyaratan dan rel hasil perancangan aman untuk
dipergunakan.
2.1.3.2. Perencanaan Roda Jalan (Roller)
Roller ini terletak pada rel luar serta pada fingerboard. Fungsinya
adalah untuk memperkecil gesekan antara rel luar dengan rel dalam serta rel
dengan fingerboard. Roller yang dipergunakan ada 8 buah. Posisi roller pada
rel luar dan fingerboard dapat diperhatikan pada Gambar 2.11 dan 2.12.
1. Analisis gaya yang terjadi pada roller yang terpasang di fingerboard
posisi tegak lurus fork miring 2° ke bawah fork miring 4° ke atas
a. Fork pada posisi tegak lurus (α = 0°)
0
= ∑MA
0 730
350− × =
× F RB 350 730 × = F RB 57 , 3128 350 730 1500 = × = B
R kg (→)
57 , 3128 = = B A R
R kg (←)
b. Fork miring ke bawah (α = 2°)
0
= ∑MA
0 2 cos . 730
350− × °=
× F RB 350 2 cos . 730 ° × = F RB 67 , 3126 350 2 cos . 730 1500 = ° × = B
R kg (→)
67 , 3126 = = B A R
R kg (←)
c. Fork miring ke atas (α = 4°)
0
= ∑MA
0 4 cos . 730
350− × °=
× F RB 350 4 cos . 730 ° × = F RB 95 , 3120 350 4 cos . 730
1500× °=
=
B
R kg (→)
2. Analisis gaya yang terjadi pada roller yang terpasang di rel
posisi tegak lurus fork miring 2° ke bawah fork miring 4° ke atas
Gambar 2.12 Posisi roller pada rel
a. Fork pada posisi tegak lurus dengan rel (α = 0°)
0
= ∑MC
0 730
350− × =
× F RD 350 730 × = F RD 57 , 3128 350 730
1500× =
=
D
R kg (←)
57RC =RD =3128, kg (→)
b. Fork miring ke bawah (α = 2°)
0
= ∑MC
0 2 cos . 730
350− × °=
× F RD 350 2 cos . 730 ° × = F RD 67 , 3126 350 2 cos . 730 1500 = ° × = D
67 , 3126 = = D C R
R kg (←)
c. Fork miring ke atas (α = 4°)
0
= ∑MC
0 4 cos . 730
350− × °=
× F RD 350 4 cos . 730 ° × = F RD 95 , 3120 350 4 cos . 730
1500× °=
=
D
R kg (→)
95RC =RD =3120, kg (←)
Dari hasil analisis gaya-gaya di atas, didapatkan bahwa reaksi maksimum
terjadi di titik C dengan posisi fork tegak lurus dengan rel. RC =3128,57kg.
3. Pemilihan roller
Dari hasil perhitungan gaya reaksi roller, maka dapat dipilih jenis roller
silinder tipe N307 menggunakan Tabel L.2 pada lampiran.
Diameter dalam d = 35 mm
Diameter luar D = 80 mm
Kapasitas nominal dinamik spesifik C = 3850 kg
Kecepatan angkat maksimum v = 600 mm/s
Putaran roller ditentukan oleh persamaan 2.35.
60 n D
v=π× × ... (2.35)
24 , 143 80 600 60 = × × = π n rpm
Kecepatan roller pada rel dan fingerboard adalah setengah kalinya dari
kecepatan angkat maksimum, sehingga :
62 , 71 2 24 , 143 = = n rpm
Faktor kecepatan untuk bantalan rol ditentukan oleh persamaan 2.36
(Sularso dan Kiyokatsu Suga, 1997, halaman 136).
10 3 3 , 33 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = n
fn ... (2.36)
79 , 0 62 , 71 3 , 33 10 3 = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = n f
Faktor umur ditentukan oleh persamaan 2.37 (Sularso dan Kiyokatsu Suga,
1997, halaman 136).
P C f
fh = n× ... (2.37)
Dengan : C = kapasitas normal dinamik spesifik (kg)
P = beban reaksi maksimal pada roller = 3128,57 kg
Sehingga : 97 , 0 57 , 3128 3850 79 ,
0 × =
=
h
f
Umur nominal ditentukan oleh persamaan 2.38.
3 10
500 h
h f
L = × ... (2.38)
4. Poros roller
Data-data untuk poros roller adalah sebagai berikut :
Diameter poros roller ds = 35 mm
Bahan poros = S 25 C
Tegangan lentur bahan σA = 21 kg/mm²
Konstruksi poros roller tersebut dapat dilihat pada Gambar 2.13.
.
Gambar 2.13 Poros roller
Momen lentur poros roller adalah :
55 , 46928 15
57 ,
3128 × =
=
s
M kg.mm
Tegangan lentur yang terjadi pada poros roller akibat beban ditentukan oleh
persamaan 2.39 (Sularso dan Kiyokatsu Suga, 1997, halaman 12).
3
2 , 10
s s a
d M
× =
σ ... (2.39)
16 , 11 35
55 , 46928 2
, 10
3 =
× =
a
σ kg/mm²
Persyaratan yang harus dipenuhi adalah bahwa tegangan lentur yang terjadi
σa≤σA
11,16 ≤ 21
Didapatkan bahwa tegangan lentur yang terjadi masih lebih kecil dibanding
tegangan lentur izin bahan, maka poros roller ini aman untuk dipergunakan.
2.1.3.3. Perencanaan Rantai
Rantai pada unit mast ini pada satu sisi terikat dengan fingerboard
dan pada sisi yang lain terpasang pada penghubung rel luar (outer mast).
Panggunaan rantai ini memberi keuntungan karena rantai ini mempunyai
kekuatan yang besar sehingga mampu untuk meneruskan daya yang besar
pula, tidak memerlukan tegangan awal, dan mudah dalam pemasangannya.
Di sisi lain, rantai juga memiliki beberapa kekurangan, antara lain tidak
mampu untuk digunakan pada variasi kecepatan yang terlalu tinggi,
menimbulkan kebisingan akibat gesekan yang terjadi.
Rantai yang dipakai adalah rantai dengan model roller chains. Rantai
dengan model tersebut merupakan transmisi tanpa slip dengan kecepatan
maksimum 600 m/menit atau 10000 mm/s. kecepatan angkat maksimum
adalah 600 mm/s dengan kecepatan rantai setengah dari kecepatan angkat
maksimum, yaitu 300 mm/s, sehingga penggunaan dan pemilihan rantai rol
telah tepat serta memenuhi persyaratan. Beban tarik yang dialami oleh rantai
ditentukan oleh persamaan 2.40.
roller fg
f
rantai Q W W
Ft = + − + ... (2.40)
fg f
W − = berat fork-fingerboard backrest (kg)
roller
W = berat roller (kg)
Sehingga :
3320 20
300
3000+ + =
=
rantai
Ft kg
Jumlah rantai yang dipergunakan n = 2
Maka beban untuk setiap rantai adalah :
1660 2
3320
1rantai = =
F kg
Pemilihan rantai dilakukan dengan memperhatikan Tabel L.3 pada lampiran.
Berdasarkan Tabel L.3 maka dipilih Rantai No. #60-3 dengan beban
maksimum yang diizinkan = 1850 kg.
Rantai mengalami beban tambahan berupa gaya yang disebabkan
oleh pengaruh gaya sentrifugal pada rantai. Besarnya beban ini ditentukan
oleh persamaan 2.41 (Ir. M. J. Djokosetyardjo, 1990, halaman 18).
2
v m
FC = × ... (2.41)
Dengan : m = berat rantai = 4,54 kg
v = kecepatan gerak rantai = 300 mm/s = 0,3 m/s
Sehingga :
41 , 0 3 , 0 54 ,
4 × 2 =
=
C
F N
04 , 0
=
C
F kg
Oleh karena gaya sentrifugal yang dihasilkan memiliki harga yang relative
1. Pemeriksaan kekuatan rantai
Luasan untuk tiap-tiap bagian rantai adalah sebagai berikut :
a. Pena 1 2
4 D
A =π ×
Dengan : D = diameter pena = 5,96mm
Sehingga : 95,96 27,
4
2
1 = × =
π
A mm²
b. Rol 2
2
4 R
A =π ×
Dengan : R = diameter rol = 11,91 mm
Sehingga : 11,91 111,41
4
2
2 = × =
π
A mm²
c. Plat mata rantai A3 =T×
(
H −D)
(
h D)
TA4 = × −
Dengan : T = tebal mata rantai = 2,4 mm
H = lebar mata rantai = 18,1 mm
h = lebar mata rantai =15,6 mm
Sehingga : A3 =2,4×
(
18,1−5,96)
=29,14 mm²(
15,6 5,96)
23,14 4, 2
4 = × − =
A mm²
Tegangan yang terjadi pada tiap-tiap bagian rantai adalah sebagai berikut :
a. Pena
Tegangan geser 59,5
9 , 27 1660 = = τ kg/mm² Tegangan lentur a a a W M =
Dengan : Ma = momen lentur (kg.mm)
a
W = momen tahanan terhadap lentur (mm³) = 3 32×D
π
Sehingga dengan menggunakan persamaan 2.42 maka dapat diperoleh :
68 , 191 96 , 5 32 4 , 2 1660 3 = × × = π
σa kg/mm²
Tegangan ideal yang terjadi dapat ditentukan oleh persamaan 2.23.
2 2
3τ
σ σb = a +
63 , 217 5 , 59 3 68 ,
191 2 + × 2 =
=
b
σ kg/mm²
b. Rol
Tegangan geser 14,9
41 , 111 1660 = = τ kg/mm²
Tegangan lentur ditentukan oleh persamaan 2.42.
02 , 24 91 , 11 32 4 , 2 1660 3 = × × = π
σa kg/mm²
Tegangan ideal yang terjadi ditentukan oleh persamaan 2.23.
26 , 35 9 , 14 3 02 ,
24 2 + × 2 =
=
b
σ kg/mm²
c. Plat mata rantai
Tegangan tarik untuk A3 57
14 , 29 160 = = b
σ kg/mm²
Tegangan tarik untuk A4 71,74
14 , 23 1660 = = b
σ kg/mm²
Tegangan maksimum yang terjadi pada bagian-bagian rantai adalah :
Pena σmax =10×217,63=2176,3 kg/mm²
Rol σmax =10×35,26=352,6 kg/mm²
Plat mata rantai σmax =10×71,74=717,4 kg/mm²
Batas kekuatan dari rantai yang telah dipilih adalah σB =9600 kg/mm²
Ditentukan persyaratan bahwa tegangan maksimum yang terjadi harus lebih
kecil daripada kekuatan tarik rantai.
Didapatkan bahwa tegangan maksimum yang terjadi adalah lebih kecil
dibanding kekuatan tarik rantai.
σmax≤σB
2176,3 ≤ 9600
Maka, rantai yang telah dipilih aman untuk dipergunakan.
2. Perhitungan baut pengikat rantai
Beban yang terjadi pada baut adalah :
1660
1 =
= rantai
b F
W kg
Bahan baut pengikat rantai dipilih dari tabel L.4 pada lampiran.
Bahan baut = FC30
Kekuatan tarik σB = 30 kg/mm²
Faktor keamanan Sf = 7 (Sularso dan Kiyokatsu Suga, 1997, halaman 296)
Tegangan lentur yang diizinkan ditentukan oleh persamaan 2.43 (Sularso
dan Kiyokatsu Suga, 1997, halaman 301).
Sf
B a
σ
29 , 4 7 30 = = a
σ kg/mm²
Diameter inti baut ditentukan oleh persamaan 2.44 (Sularso dan Kiyokatsu
Suga, 1997, halaman 296).
64 , 0 4 × × × ≥ a b b W d σ
π ... (2.44)
64 , 0 29 , 4 1660 4 × × × ≥ π b d 74 , 27 ≥ b d mm
Berdasarkan Tabel L.5 maka dipilih baut M30.
Pemeriksaan terhadap tegangan lentur ditentukan oleh persamaan 2.45
(Sularso dan Kiyokatsu Suga, 1997, halaman 296).
a b b d W σ π × × 2 ≤
8 , 0 4 ... (2.45) 29 , 4 211 , 26 8 , 0 4 1660 2 ≤ × × π 29 , 4 85 , 3 ≤
Tegangan lentur yang dialami baut lebih kecil dibanding tegangan lentur
izin dari bahan, sehingga baut yang dipilih aman untuk dipergunakan.
3. Perhitungan mur
Bahan mur dipilih berdasarkan Tabel L.4 pada lampiran.
Bahan mur = FC30
Faktor keamanan Sf = 7 (Sularso dan Kiyokatsu Suga, 1997, halaman 296)
Tegangan lentur yang diizinkan ditentukan oleh persamaan 2.43
29 , 4 7 30 = = = Sf B a σ
σ kg/mm²
Tegangan geser izin ditentukan oleh persamaan 2.46 (Sularso dan Kiyokatsu
Suga, 1997, halaman 299).
a
a σ
τ =0,5× ... (2.46)
145 , 2 29 , 4 5 ,
0 × =
=
a
τ kg/mm²
Tekanan permukaan izin dapat dilihat pada Tabel L.6 pada lampiran.
5 , 1
=
a
q kg/mm²
Dari tabel L.5 pada lampiran, maka dapat diketahui dimensi mur M30
sebagai berikut :
Diameter luar ulir dalam D = 30 mm
Diameter inti ulir dalam D1 = 26,211 mm
Diameter efektif ulir dalam D2 = 27,727 mm
Tinggi kaitan gigi dalam H = 1,894 mm
Jarak bagi (pitch) P = 3,5
Jumlah ulir mur ditentukan oleh persamaan 2.47 (Sularso dan Kiyokatsu
Suga, 1997, halaman 297).
a b q h D W Z × × × ≥ 2
π ... (2.47)
5 , 1 894 , 1 727 , 27 1660 × × × ≥ π Z 71 , 6 ≥
Tinggi mur ditentukan oleh persamaan 2.48 (Sularso dan Kiyokatsu Suga,
1997, halaman 297).
P Z
H ≥ × ... (2.48)
5 , 3 7× ≥ H 5 , 24 ≥ H
Persyaratan yang harus dipenuhi adalah bahwa tinggi mur adalah antara 0,8
sampai dengan 1 kali diameter mur (Sularso dan Kiyokatsu Suga, 1997,
halaman 297).
(
)
DH ≥ 0,8−1
(
0,8−1)
30≥
H
27
≥
H maka tinggi mur direncanakan H = 30mm
Maka jumlah ulir mur koreksi adalah : 8,57
5 , 3 30 '= = = P H Z
Tegangan geser akar ulir baut ditentukan oleh persamaan 2.49 (Sularso dan
Kiyokatsu Suga, 1997, halaman 297).
Z P k D
Wb
b = × × × ×
1 π
τ ... (2.49)
Dengan : harga k untuk ulir metris k≈0,84
Sehingga : 8 , 0 57 , 8 3 84 , 0 211 , 26 1660 = × × × × = π
τb kg/mm²
Tegangan geser akar ulir mur ditentukan oleh persamaan 2.50 (Sularso dan
Z P j D
Wb
n =π × × × ×
τ ... (2.50)
Dengan : harga j untuk ulir metris j≈0,75
Sehingga :
78 , 0 57 , 8 3 75 , 0 30
1660 =
× × × × =
π
τn kg/mm²
Didapatkan bahwa tegangan geser baut maupun tegangan geser mur lebih
kecil daripada tegangan geser izin bahan, sehingga baut dan mur aman untuk
dipergunakan.
2. 2. Sistem Hidrolik (Hydraulic System) 2.2.1. Pengertian Dasar
Sistem hidrolik merupakan pengalihan beberapa gaya dan gerak
dalam mesin dengan menggunakan media zat cair atau fluida. Forklift ini
dalam unjuk kerja dan gayanya akan menggunakan sistem hidrolik.
Keuntung