Abstrak—Quadcopter merupakan UAV berbaling-baling yang memiliki kemampuan hover(melayang) pada satu titik(point) sehingga dapat dengan mudah dalam hal operasionalnya pada daerah yang sulit. Walaupun demikian, dinamika dari plant yang cenderung kompleks dan tidak stabil menyebabkan quadcopter sulit untuk terbang. Fase take-off pada quadcopter merupakan fase kritis yang mutlak harus dijaga kestabilannya. Perlu diperhatikan bahwa pengaruh turbulensi angin yang dihasilkan dari perputaran motor merupakan salah satu gangguan yang menyebabkan sulitnya proses take-off. Oleh karena itu, diperlukaan adanya sistem autopilot yang dapat mengendalikan proses take-off quadcopter dengan baik. Pada tugas akhir ini diterapkan kontrol PID yang di kombinasikan dengan logika fuzzy sebagai penala parameter kontroler. Pada saat implementasi, kendala yang berupa keterbatasan pada kemampuan motor masih kurang dapat mengkompensasi jika terjadi turbulensi yang signifikan.Terlebih lagi dengan ukuran plant yang cukup berat. Untuk mencapai ketinggian sekitar 0 hingga 1 meter dimana banyak terjadi gangguan turbulensi, dapat dicapai oleh quadcopter dalam waktu 4.85 detik. Kemudian terjadi offset sebesar 0.96% pada kondisi steady state yang dicapai dalam waktu 5 detik.
Kata Kunci— Quadcopter, Take-Off, PID, Fuzzy.
I. PENDAHULUAN
ari sekian banyak penelitian, kendaraan udara tanpa awak atau yang biasa disebut UAV(Unmanned Aerial Vehicle) menjadi salah satu area pengembangan yang diprioritaskan. Ini disebabkan pertimbangan dari sisi fungsionalitasnya yang sangat beragam dan aplikatif pada berbagai keperluan. Aplikasi UAV yang umum saat ini diantaranya adalah untuk keperluan militer seperti monitoring perbatasan, foto udara atau bahkan mengintai musuh saat perang. Adapun untuk keperluan sipil yakni foto udara untuk keperluan mapping, eksplorasi daerah yang sulit dijangkau dan berbahaya, maupun untuk monitoring daerah yang terkena bencana.
Seringkali daerah operasional UAV di daerah yang sulit menyebabkan jenis UAV yang berbaling baling lebih unggul dibandingkan UAV jenis fixed wing. Ini dikarenakan kemampuan UAV berbaling baling untuk melakukan take-off dan landing secara vertikal(Vertical Take-off Landing) sehingga tidak memerlukan landasan pacu yang luas seperti halnya pesawat fixed wing. Salah satu jenis UAV berbaling baling yang cukup populer dari segi penggunaan dan pengembangannya adalah quadcopter. Quadcopter memiliki kemampuan hover(melayang) pada satu titik(point) sehingga
dapat dengan mudah dalam hal operasionalnya pada daerah yang sulit. Walaupun demikian, dinamika dari plant yang cenderung kompleks dan tidak stabil menyebabkan
quadcopter sulit untuk terbang. Kebutuhan akan pilot yang
berpengalaman pun sangat diperlukan dalam menerbangkan
quadcopter, khususnya dalam melakukan proses take-off. Fase take-off pada quadcopter merupakan fase kritis yang mutlak
harus dijaga kestabilannya. Perlu diperhatikan juga bahwa pengaruh turbulensi dari angin yang dihasilkan dari perputaran motor merupakan salah satu gangguan yang menyebabkan sulitnya proses take-off. Oleh karena itu, diperlukaan adanya sistem autopilot yang dapat mengendalikan proses take-off
quadcopter dengan baik.
Permasalahan plant yang cenderung tidak stabil dapat diatasi dengan penggunaan kontrol PID (Proportional,
Integral, Derivative) yang diintegrasikan pada quadcopter.
Pemilihan kontrol PID ini dikarenakan sederhana, mudah dipelajari dan tentunya mudah untuk diaplikasikan. Kontroler ini pun telah banyak digunakan secara luas baik di industri maupun pada pengembangan kendaraan udara tanpa awak. Kemudian atas dasar pertimbangan sifat plant yang dinamis dan proses take-off yang diprediksi akan mengakibatkan perubahan parameter plant, maka dilakukan modifikasi kontroler PID yang dikombinasikan dengan Logika Fuzzy.
II. TEORIPENUNJANG
A. Quadcopter[2]
Quadcopter atau sering disebut ‘quadrotor’ dapat
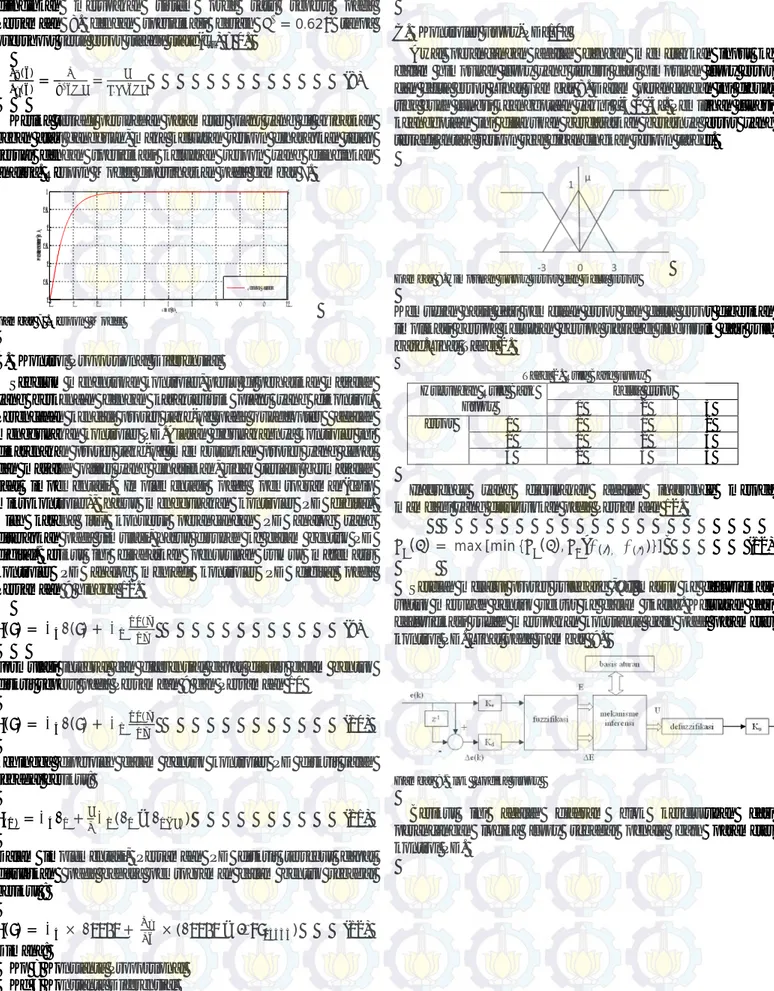
dimodelkan sebagai sebuah konfigurasi empat buat motor pada sebuah kerangka kaku(rigid body) yang menyilang. Kerangka berbahan dasar fiber biasanya digunakan karena sifatnya yang ringan dan kuat. Pada masing masing motor terpasang baling-baling(propeller) untuk membuat aliran udara yang menghasilkan tekanan ke arah bawah sehingga timbul gaya angkat pada quadcopter. Lihat Gambar 1.Motor depan dan belakang memiliki arah putaran searah jarum jam. Sebaliknya motor kanan dan kiri berputar dengan arah berlawanan jarum jam. Gerakan(altitude)yang dihasilkan
quadcopter adalah :
Perancangan dan Implementasi
Kontrol Fuzzy-PID pada Pengendalian Auto
Take-Off Quadcopter UAV
Whanindra Kusuma, Rusdhianto Effendi AK, dan Eka Iskandar
Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman Hakim, Surabaya 60111
E-mail: [email protected] , [email protected]
Gambar 1 : Model Quadcopter
Gerakan Throtle
Gerakan ini dilakukan dengan menambah atau mengurangi kecepatan masing masing motor secara serempak.
Gerakan Pitch
Gerakan ini dihasilkan dari penambahan atau pengurangan kecepatan motor belakang sembari melakukan pengurangan atau penambahan kecepatan pada motor depan.Gerakan ini bertumpu pada sumbu X.
Gerakan Roll
Gerakan ini dilakukan dengan menambah atau mengurangi kecepatan motor kiri sembari mengurangi atau menambah kecepatan motor kanan. Gerakan ini bertumpu pada sumbu Y.
Gerakan Yaw
Gerakan ini dilakukan dengan menambah atau mengurangi kecepatan sepasang motor(kanan dan kiri) secara serempak sembari melakukan pengurangan atau penambahan kecepatan sepasang motor lainnya(depan dan belakang) secara serempak.Gerakan ini bertumpu pada sumbu Z.
B. Pemodelan Quadcopter[2][3]
Perhitungan untuk mendapatkan pemodelan fisis yang tepat dapat dilakukan dengan memakai pendekatan asumsi mengenai kondisi fisik dari quadcopter. Hal ini bertujuan untuk menyederhanakan komplektifitas sistem yang dihasikan dari dinamika quadcopter. Beberapa asumsi tersebut antara lain :
1) Struktur body dari quadcopter merupakan benda kaku(rigid)
2) Struktur body frame dari quadcopter bersifat simetris sepanjang sumbu x dan y
3) Struktur dari propeller merupakan benda kaku(rigid) 4) Gaya thrust dan drag adalah proporsional dengan
kuadrat dari kecepatan propeller
5) Keadaan model diasumsikan dalam keadaan hovering. 6) Aerodinamika seakan akan diabaikan
7) Nonlinieritas dari baterai diabaikan. 8) Tidak ada slip antara propeller dan motor.
Quadcopter memiliki 6 defree of freedom (DoF) yang
menghasilkan 12 keadaan(state) keluaran. Keadaan keluaran tersebut menghasilkan gerakan yang merepresentasikan
altitude dari quadcopter yakni gerakan translasi(u,v,w) dan
gerakan rotasi( , . ). Berikut variabel keluaran yang akan digunakan untuk mengGambarkan posisi dan gerakan
quadcopter.
x = posisi quadcopter terhadap sumbu Xe
y = posisi quadcopter terhadap sumbu Ye z = posisi quadcopter terhadap sumbu Ze
= kecepatan quadcopter yang diukur pada sumbu Xb = kecepatan quadcopter yang diukur pada sumbu Yb = kecepatan quadcopter yang diukur pada sumbu Zb = sudut roll terhadap sumbu Xe
= sudut pitch terhadap sumbu Ye = sudut yaw terhadap sumbu Ze
= kecepatan sudut roll yang diukur pada sumbu Xb = kecepatan sudut pitch yang diukur pada sumbu Yb = kecepatan sudut yaw yang diukur pada sumbu Zb
Gambar 2. Ilustrasi B-frame terhadap E-frame
Persamaan model dari quadcopter diperoleh melalui pemodelan fisik yang umum didapatkan dari beberapa penelitian. Persamaan yang digunakan adalah berdasarkan penelitian Tomasso Bresciani (Modelling, Identification and
Control of a Quadcopter Helicopter.,2005). Telah dijelaskan
sebelumnya bahwa dalam perancangan simulasi quadcopter digunakan 12 buah keluaran yang menentukan pola gerakan dari quadcopter. Persamaan model fisik yang merepresentasikan gerak translasi dan rotasi quadcopter tersebut dituliskan pada Persamaan 1-6.
̈ = ( + ) (1) ̈ = (− + ) (2) ̈ = − + ( ) (3) ̇ = + + (4) ̇ = + + (5) ̇ = + (6) Ada beberapa parameter fisik hasil pengukuran yang digunakan dalam pemodelan quadcopter. Lihat Tabel 1.
Tabel 1. Pengukuran Parameter Fisik Quadcopter
Parameter Hasil pengukuran Konstanta thrust motor(b) 1.92 x 10-6
Berat quadcopter 1.243 kg
Konstanta drag motor(D) 2,5 x 10-7 Momen inersia motor(Jr) 3,375 x 10-5 Momen inersia pada sumbu x(Ixx) 2,4 x 10-3 kg.m2
Momen inersia pada sumbu y(Iyy) 5,9 x 10
-3 kg.m2 Momen inersia pada sumbu z(Izz) 5,2 x 10
-3 kg.m2 Panjang frame dari titik tengah(L) 25,4 cm
C. Kontrol PID[7]
Setiap kekurangan dan kelebihan dari masing-masing kontroler Proporsional, Integral dan Diferensial dapat saling
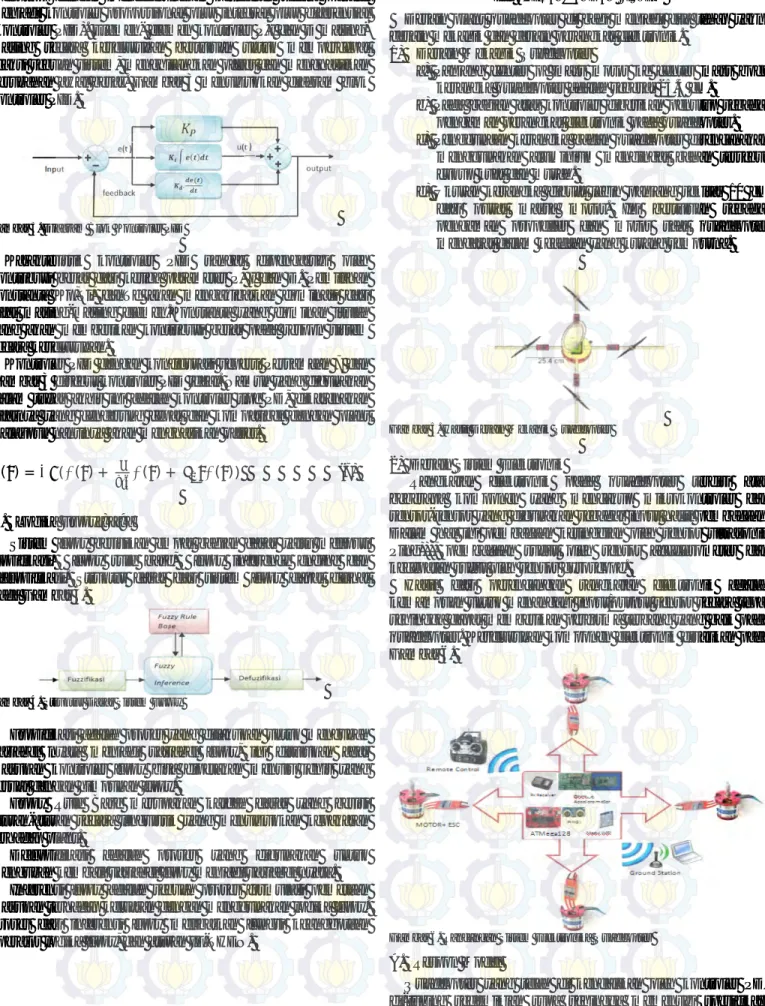
menutupi dengan menggabungkan ketiganya secara paralel menjadi kontroler proporsional plus integral plus diferensial (kontroler PID). Elemen- elemen kontroler P,I dan D masing-masing secara keseluruhan bertujuan untuk mempercepat reaksi sebuah sistem, menghilangkan offset dan menghasilkan perubahan awal besar. Gambar 3 menunjukkan diagram blok kontroler PID.
Gambar 3. Diagram Blok Kontroler PID
Karakteristik kontroler PID sangat dipengaruhi oleh kontribusi besar dari ketiga parameter P, I dan D. Pemilihan konstanta Kp,Ti, danTd akan mengakibatkan dominasi dari sifat masing-masing elemen.Konstanta yang dominan itulah yang akan memberikan kontribusi besar pada respon sistem secara keseluruhan.
Kontroler PID dengan konfigurasi seperti Persamaan 7 dan Gambar 3 disebut kontroler PID ideal. Namun yang digunakan dalam tugas akhir ini adalah kontroler tipe PD, dikarenakan sifatnya yang cenderung cepat dan kompatibel dengan plant walaupun nantinya akan menghasikan offset.
( ) = ( ( ) + ( ) + ( )) (7)
D. Logika Fuzzy[8][9]
Sistem fuzzy berisikan empat bagian dasar yaitu meliputi
fuzzifikasi, fuzzy rule base, fuzzy inference engine dan defuzzifikasi. Struktur dasar dari sistem fuzzy dapat dilihat
pada Gambar 4.
Gambar 4. Struktur Dasar Sistem Fuzzy
Fuzzifikasi adalah proses yang dilakukan untuk mengubah
variabel nyata menjadi variabel fuzzy, ini ditujukan agar masukan kontroler fuzzy bisa dipetakan menuju jenis yang sesuai dengan himpunan fuzzy.
Fuzzy Rule Base merupakan kaidah dasar yang berisi
aturan-aturan secara linguistik yang menunjukkan kepakaran terhadap plant.
Defuzzifikasi adalah proses yang digunakan untuk
mengubah kembali variabel fuzzy menjadi variabel nyata. Inferensi fuzzy adalah sebuah proses formulasi pemetaan masukan terhadap keluaran dengan menggunakan logika fuzzy. Proses dari inferensi fuzzy melibatkan fungsi keanggotaan operator logika fuzzy, dan aturan IF-THEN.
III. PERANCANGAN SISTEM
Desain plant quadcopter di bagi menjadi dua tahap yakni desain mekanik dan desain perangkat elektronik.
1) Desain Mekanik Quadcopter
a) Panjang center of mass motor ke center mass body kerangka quadcopter adalah sebesar 25.4 cm.
b) Pada bagian atas kontroler diberikan penutup sebagai pengaman perangkat elektronik pada quadcopter. c) Penggunaan kerangka badan quadcopter direncanakan
menggunakan aluminium mengingat bahan tersebut cukup kuat dan murah.
d) Ukuran kerangka dibuat lebih panjang sekitar 10 cm dari pusat massa motor. Ini bertujuan sebagai pengaman propeller dan motor saat quadcopter mendarat dalam keadaan yang kurang sempurna.
Gambar 5. Hasil Desain Mekanik Quadcopter
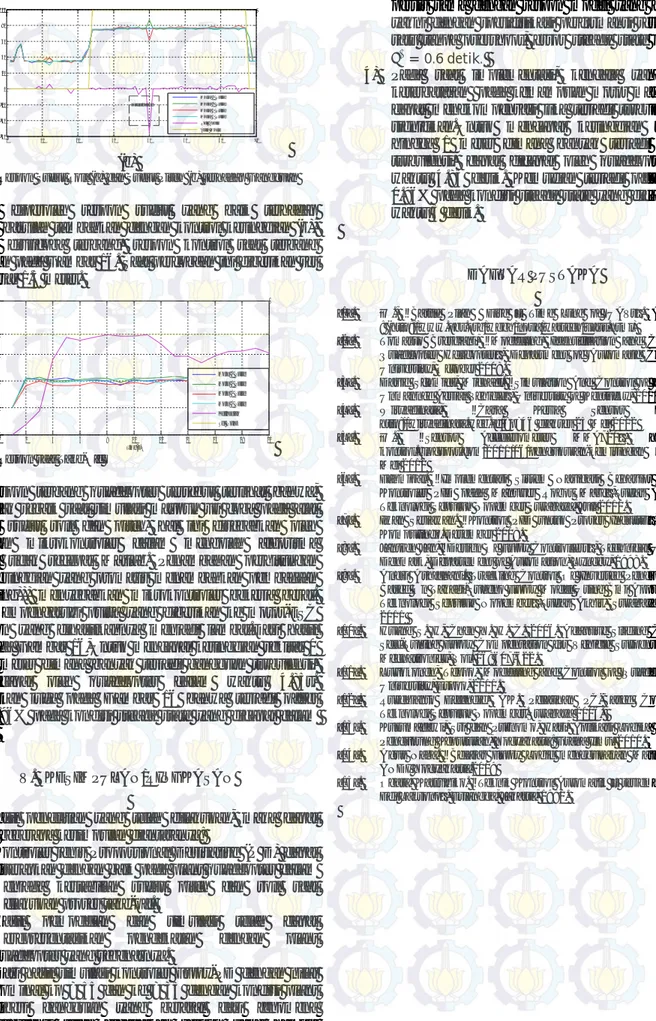
2) Desain Sistem Elektronik
Rangkaian elektronik pada quadcopter terdiri atas beberapa komponen yang mencakup mikrokontroler dan sensor-sensor yang digunakan sebagai input hasil pembacaan. Dalam hal ini pembacaan ketinggian oleh sensor ultrasonik
Ping))), pembacaan sudut oleh sensor accelerometer dan
kecepatan sudut oleh sensor gyroscope.
Hasil dari perencangan rangkaian elektronik adalah kemampuan untuk menangani input/output sensor secara tepat sehingga dapat memberikan performa terbang yang baik pada
quadcopter. Keseluruhan komponen elektronik disajikan pada
Gambar 6.
Gambar 6. Rancangan Sistem Elektronika Quadcopter
A. Respon Model
Quadcopter yang telah di kendalikan oleh kontroler PD,
keluaran respon yang diinginkan. Respon target yang diinginkan merupakan sistem orde satu seperti pada Persamaan 8. dengan spesifikasi desain ∗= 0.62 tanpa
overshoot serta error steady state(ess) = 0.
( )
( )= ∗ = . (8)
Ketika terjadi perubahan parameter plant yang di akibatkan beban atau gangguan, maka keluaran respon diharapkan tetap sesuai dengan spesifikasi keluaran respon yang diinginkan analisa. Respon Model diperlihatkan pada gambar 7.
Gambar 7 .Respon Model
B. Kontrol Proportional Diferensial
Sebelum menentukan kontroler, perlu di perhatikan masalah yang berkenaan dengan karakteristik plant yang dikontrol. Perencaaan kendali proses take-off pada quadcopter adalah menggunakan kontroler PD.Alasan digunakannya kontroler ini dikarenakan proses take-off membutuhkan proses yang cepat dan masalah offset yang dihasilkan, tidak terlalu bermasalah saat impementasi. Implementasi pada pemrograman(chip mikrokontroler), harus menggunakan kontroler PD digital. Oleh karena itu, konversi perancangan PD analog yang diterapkan pada simulasi, harus dirubah ke dalam bentuk PD digital.Berikut ini dijabarkan penurunan rumus matematis kontroler PD analog menjadi kontroler PD digital pada Persamaan 9 hingga 12.
( ) = ( ) + ( ) (9)
Formulasi integral dan diferensial dapat ditulis dalam bentuk diskrit seperti pada Persamaan 9 dan Persamaan 10
( ) = ( ) + ( ) (10) Sehingga diperoleh dalam bentuk kontroler PD diskrit ialah sebagai berikut:
( )= + ( − )) (11)
Dalam implementasi, Persamaan PD diskrit tersebut dapat dituliskan pada bahasa pemrograman dalam bentuk sebagai berikut :
( ) = × + × ( − ) (12)
Dimana:
Kp = Konstanta Proportional Kd = Konstanta Diferensial error = Nilai Kesalahan
last_error = Nilai Kesalahan Sebelumnya
C. Kontroler Fuzzy-PD[10]
Awal perancangan adalah dengan memetakkan input ke dalam himpunan fuzzy yang terdiri dari himpunan fuzzy error dan delta error Lihat Gambar 8. Dalam perancangan ini dibuat tiga buah fungsi keanggotaan yakni [-3 0 -3]. Pemilihan fungsi keanggotaan ini dilakukan berdasarkan besarnya error yang terjadi antara respon real dibandingkan respon target.
Gambar 8.Himpunan Fuzzy Error dan Delta Error
Kemudian hasil dari pemetaan error dan delta error diberikan implikasi berupa keluaran berupa variabel linguistik dari rule
base.Lihat Tabel 2.
Tabel 2. Rule Base Fuzzy
Hubungan Rule Base
Fuzzy delta error 1 2 3 error 1 1 1 2 2 1 2 3 3 2 3 3
Inference yang digunakan adalah inference metode
mamdani yang ditunjukkan pada Persamaan 12.
( )= max [min { ( ), ( ),∆ ( ))}] (12)
Setelah melalui proses rulebase ,
µ
u masuk ke defuzifikasi untuk merubah bentuk vektor ke dalam skalar. Keluaran dari defuzifikasi sudah merupakan konstanta gain pada parameter kontrol PD. Lihat pada Gambar 9.Gambar 9.Blok Logika Fuzzy
Berikut ini adalah diagram blok keseluruhan dari perancangan logika fuzzy sebagai penala gain parameter kontrol PD. 0 1 2 3 4 5 6 7 8 9 10 0 0.5 1 1.5 2 2.5 3 Time(s) K e ti n g g ia n (m ) Respon Target
Gambar 10. Diagram Blok Kontroler Fuzzy- PD
IV. HASIL DAN ANALISA
A. Simulasi Kontroler Fuzzy-PID pada Quadcopter
Simulasi kontrol Fuzzy-PID dilakukan dengan menggunakan Matlab Simulink. Pada simulasi, set point ketinggian diberikan sebesar 3 meter dengan kondisi awal 0 meter. Kontroler PD dituning sedemikian rupa sehingga dapat mencapai respon target yang telah ditentukan. Proses penalaan secara eksperimen dilakukan untuk memperoleh parameter kontroler PD sebagai berikut :
Tabel 3 . Tuning Parameter Kontroler PD untuk Ketinggian
Parameter
Kontroler Hasil Respon
Kp Kd
5 0 Respon masih lambat dan berosilasi 5 5 Respon lambat dan berosilasi
10 5 Respon lambat namun cukup berosilasi 20 5 Respon lambat dan berosilasi
30 5 Respon cukup cepat dan sangat berosilasi 35 15 Respon cukup cepat dan berosilasi 35 25 Respon cukup cepat dan cukup berosilasi 45 35 Respon cepat dan cukup berosilasi 55 35 Respon cepat tanpa berosilasi
Berikut ini ditunjukkan pada gambar 11 hasil respon plant setelah dengan kontrol PD yang telah dituning.
Gambar 11.Hasil Respon Plant dengan Parameter Kontroler kp = 55 dan kd=35
Dari hasil penalaan pada parameter kontroler PD telah didapatkan respon yang sesuai dengan model respon model yang diinginkan dengan spesifisikasi performansi respon orde satu tanpa overshoot, error steady state nol serta ∗= 0.62 . Kemudian diberikan gangguan yang merepresentasikan turbulensi yang menghambat gaya angkat ketika diberikan nilai kp dan kd nominal(nilai yang telah didapatkan sebelumnya) .Lihat Gambar 12. Sehingga respon plant yang dihasilkan menjadi tidak baik. Disinilah peran logika fuzzy sebagai penala parameter kontrol PD sehingga respon plant sesuai atau mendekati respon model.
Gambar 12. Respon Plant dengan Gangguan Turbulensi dengan Kontrol PD Konvensional
Kemudian pada Gambar 13 diperlihatkan penerapan dari kontroler Fuzzy-PD pada plant yang mengalami gangguan.
Gambar 13. Respon Plant dengan Gangguan Turbulensi dengan Kontrol
Fuzzy-PD
Dari hasil simulasi kontroler Fuzzy-PD telah didapatkan respon yang hampir persis sama dengan respon model yang diinginkan yakni dengan spesifisikasi performansi respon orde satu tanpa overshoot, error steady state nol serta
∗= 0.6 .
B. Implementasi Kontroler Fuzzy-PID pada quadcopter
Pengujian pertama dilakukan dengan menguji keseimbangan sudut roll dan pitch saat quadcopter belum diterbangkan, dengan menggunakan alat bantu sederhana, sebagaimana Gambar 14
Gambar 14. Pengujian Kestabilan Gerakan Pitch dan Roll
Gambar 15 menunjukkan respon kontrol PD yang telah ditanamkan pada plant quadcopter dan diuji coba dengan alat bantu seperti Gambar 14.
(a) 0 1 2 3 4 5 6 7 8 9 10 0 0.5 1 1.5 2 2.5 3 X: 1.07 Y: 2.529 Time(s) K e ti n g g ia n (m ) 2 .5 2 8 0 Respon Plant 0 1 2 3 4 5 6 7 8 9 10 0 0.5 1 1.5 2 2.5 3 Time(s) K e ti n g g ia n (m ) Respon Target Respon Plant 0 1 2 3 4 5 6 7 8 9 10 0 0.5 1 1.5 2 2.5 3 Time(s) K e ti n g g ia n (m ) Respon Target Respon Plant 0 10 20 30 40 50 60 -20 0 20 40 60 80 100 Motor 1 Pulse Motor 2 Pulse Motor 3 Pulse Motor 4 Pulse Pitch Angle Auto Mode Disturbance
(b)
Gambar 15. Respon Sudut Roll (a) dan Sudut Pitch (b) terhadap Gangguan
Setelah diperoleh respon sudut yang baik terhadap gangguan barulah tambahkan dengan kontrol ketinggian (z), kemudian diujicoba terbang, respon kontrol saat terbang ditunjukkan pada Gambar 16. Saat percobaan ini diberikan set point sebesar 1.5 meter.
Gambar 16. Respon saat Take-Off
Dari respon terbang quadcopter tersebut terlihat bahwa, respon tidak sebaik saat simulasi maupun uji coba pada alat bantu uji sudut roll dan pitch, hal ini disebabkan oleh kemampuan mikrokontroler dalam mengolah algoritma aritmatika tidak secepat Matlab. Penambahan perhitungan kontrol ketinggian yang otomatis menambahkan pembacaan Sensor Ping))) menyebabkan mikrokontroler bekerja berat. Hal ini mempengaruhi pulsa yang diberikan ke motor-ESC dan respon yang dihasilkannya menjadi lambat.Dari hasil respon pada Gambar 16,Untuk mencapai ketinggian sekitar 0 hingga 1 meter dimana banyak terjadi gangguan turbulensi, dapat dicapai oleh quadcopter dalam waktu 4.85s. Diperlihatkan juga pada Gambar 16 bahwa terjadi offset sebesar 0.96% pada kondisi steady state yang dicapai dalam waktu 5s.
V. KESIMPULAN/RINGKASAN
Dari hasil penelitian yang telah dilakukan, maka dapat diperoleh beberapa kesimpulan diantaranya:
1) Kontroler jenis Proportional Derivative (P D) dapat diterapkan dengan baik pada plant quadcopter dalam menjaga kestabilan sudut pitch dan roll saat melakukan proses take-off.
2) Hasil pemodelan dan simulasi telah dapat merepresentasikan pendekatan dengan plant
quadcopter yang sebenarnya.
3) Dari hasil simulasi kontroler Fuzzy-PD dengan nilai nominal kp = 55 dan kd = 35 dengan kondisi plant diberi gangguan yang berasal dari fenomena turbulensi telah didapatkan respon yang hampir
persis sama dengan respon model yang diinginkan yakni dengan spesifisikasi performansi respon orde satu tanpa overshoot, error steady state nol serta
∗= 0.6 detik.
4) Pada saat implementasi, kendala yang berupa keterbatasan pada kemampuan motor masih kurang dapat mengkompensasi jika terjadi turbulensi yang signifikan.Untuk mencapai ketinggian sekitar 0 hingga 1 meter dimana banyak terjadi gangguan turbulensi, dapat dicapai oleh quadcopter dalam waktu 4.85 detik. Kemudian terjadi offset sebesar 0.96% pada kondisi steady state yang dicapai dalam waktu 5 detik.
DAFTARPUSTAKA
[1]. …., “Battle Plan Fire – Time Line of UAVs”. Available at
: (http://www.pbs.org/wgbh/nova/wartech/uavs.html)
[2]. Tomasso Bresciani, “Modelling, Identification and Control of a
Quadcopter Helicopter”, Department of Automatic Control Lund
University, October 2008.
[3]. David Schmidt, Michael. “Simulation And Control of a Quadrotor
Unmanned Aerial Vehicle”, University of Kentucky, 2011.
[4]. Wiryadinata, “Cara Kerja Sensor Gyroscope”,
http://wiryadinata.web.id/?p=46 diakses 25 Mei 2012
[5]. …., “Sensor Accelerometer MMA720”,
http://elektro-kontrol.blogspot.com/2011/06/pengukuran-kemiringan diakses 28 Mei 2012
[6]. Fahmizal. “Implementasi Sistem Navigasi Behavior Based dan
Kontroler PID pada Manuver Robot Maze”,Tugas Akhir,Institut Teknologi Sepuluh Nopember Surabaya, Juli 2011.
[7]. Iwan Setiawan. “Kontrol PID untuk Proses Industri”,Elex Media
Komputindo.Desember 2008.
[8]. Jantzen Jan, “Design Of Fuzzy Controllers”, Technical University of
Denmark, Departement of Automation, Lyngby, 1998.
[9]. Andri Ashfahani.”Tracking Control Of Inverted Pendulum System
Based On Takagi-Sugeno Fuzzy Model Using Bmi Approach,Institut Teknologi Sepuluh Nopember”,Tugas Akhir, Surabaya, Desember 2011
[10]. Huang S. H, Chen Y. H. C. 2006. Adaptive Sliding Control with
Self-Tuning Fuzzy Compensation for Vehicle Suspension Control.
Mechatronics, Vol. 16: 607-622.
[11]. Luukkonen, Teppo, Modelling and Control of Quadcopter, Aalto
University, Espoo, 2011.
[12]. Rusdhianto Effendie, AK. Pelatihan PC-Based Control.Institut
Teknologi Sepuluh Nopember.Surabaya 2006.
[13]. Kusumadewi, Sri dan Purnomo, Hari, Aplikasi Logika Fuzzy untuk
Pendukung Keputusan, Yogyakarta: Graha Ilmu, 2010.
[14]. Agus Naba. “Belajar Fuzzy Logic menggunakan Matlab”.Penerbit
ANDI Yogyakarta.2009
[15]. Ogata, Katsuhiko. “Teknik Kontrol Automatik – terjemahan: Ir.
Edi Laksono”, Erlangga, Jakarta, 1991.
0 10 20 30 40 50 60 70 -60 -40 -20 0 20 40 60 80 100 Motor 1 Pulse Motor 2 Pulse Motor 3 Pulse Motor 4 Pulse Roll Angle Auto Mode Disturbanc e 0 2 4 6 8 10 12 14 16 18 20 0 40 80 120 150 Time(s) K e ti n g g ia n (c m ) Motor 1 Pulse Motor 1 Pulse Motor 1 Pulse Motor 1 Pulse Ketinggian Set Point