PROPOSAL
PENELITIAN DOKTOR BARU DANA ITS TAHUN 2020
KENDALI ROBUST MODEL PREDICTIVE CONTROL MEMINIMUMKAN PENGARUH GANGGUAN STOKASTIK DAN DETERMINISTIK PADA
KENDALI GERAK KAPAL PERANG EXTENDED KORVET SIGMA
Tim Peneliti:
Dr. Tahiyatul Asfihani,S.Si, M.Si (Matematika/FSAD/ITS) Subchan, S.Si, M.Sc, Ph.D (Matematika/FSAD/ITS)
DIREKTORAT PENELITIAN DAN PENGABDIAN KEPADA MASYARAKAT INSTITUT TEKNOLOGI SEPULUH NOPEMBER
SURABAYA 2020
▸ Baca selengkapnya: proposal tahun baru doc
(2)(3)Daftar Isi
HALAMAN JUDUL . . . i
DAFTAR ISI . . . ii
DAFTAR GAMBAR . . . iii
RINGKASAN . . . vi
1 Pendahuluan . . . 1
1.1 Latar Belakang . . . 1
1.2 Perumusan dan Pembatasan Masalah . . . 3
1.3 Tujuan . . . 3
1.4 Relevansi . . . 4
1.5 Target Luaran . . . 4
2 Tinjauan Pustaka . . . 7
2.1 Studi Hasil Penelitian Sebelumnya (State of The Art) . . . 7
3 Metode Penelitian . . . 11
3.1 Tahapan Penelitian . . . 11
3.2 Organisasi Tim Peneliti . . . 12
4 JADWAL DAN RANCANGAN ANGGARAN BIAYA . . . 17
4.1 Rencana Jadwal Kegiatan Penelitian . . . 17
4.2 Rancangan Anggaran Biaya . . . 17
DAFTAR PUSTAKA . . . 20
Daftar Gambar
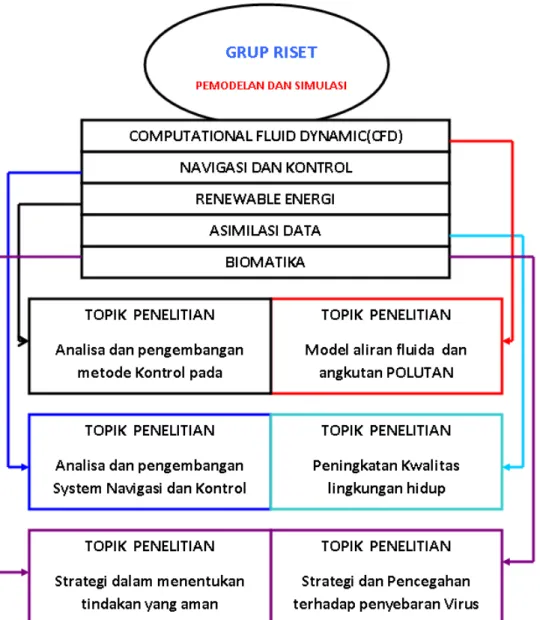
1.1 Roadmap Penelitian Laboratorium Pemodelan dan Simulasi Sistem . 5
2.1 Road Map Penelitian 2012-2025 . . . 9
3.1 Diagram Alir Kendali Robust MPC . . . 14
3.2 Diagram Alir Penelitian . . . 15
RINGKASAN
Kapal perang dalam menjalankan misinya harus mempunyai kendali yang ro-bust. Kendali robust adalah kendali yang tahan terhadap adanya gangguan yang tidak pasti. Dalam penelitian ini gangguan dibagi menjadi dua berdasarkan sifat-nya yaitu gangguan stokastik dan deterministik. Hal tersebut sejalan dengan kon-disi nyata bahwa saat berlayar kapal dipengaruhi oleh kedua gangguan tersebut. Gangguan stokastik dimisalkan berdistribusi normal atau white noise. Gangguan stokastik bisa diakibatkan adanya kesalahan pemodelan matematika gerak kapal, gangguan lingkungan seperti gelombang laut. Gangguan deterministik merupakan gangguan yang dapat diukur, gangguan ini dapat disebabkan oleh gaya akibat pe-nembakan rudal pada kapal, gaya akibat adanya helikopter mendarat pada kapal, gangguan lingkungan yang terukur, dsb.
Hal tersebut melatarbelakangi penelitian ini dengan dikembangkan algoritma baru untuk kendali robust kapal. Kendali robust berdasarkan pada pengembangan metode Model Predictive Control (MPC) yang mempertimbangkan adanya gang-guan sistem bersifat stokastik dan deterministik. Modifikasi MPC dilakukan dalam dua tahap yaitu tahap pertama menghilangkan pengaruh gangguan stokastik kemu-dian meminimumkan pengaruh gangguan deterministik dengan menambahkan ken-dali tambahan sebagai kompensasi adanya gangguan deterministik. Kenken-dali robust MPC tersebut digunakan pada sistem linier. Model matematika gerak kapal perang Extended Korvet SIGMA direpresentasikan dalam sistem linier. Kapal Extended korvet SIGMA adalah kapal pengembangan dari Korvet SIGMA yang diteliti oleh tim konsorsium kapal perang sejak tahun 2011. Target akhir TKT penelitian ini adalah 3 dengan dikembangkan algoritma baru kendali pengembangan MPC untuk sistem linier dengan gangguan stokastik dan deterministik. Luaran yang ditargetkan adalah artikel yang diterima di jurnal internasional terindeks (Q2) dan artikel dalam prosiding seminar internasional terindeks.
BAB 1
PENDAHULUAN
1.1
Latar Belakang
Kemandirian teknologi dalam ALUTSISTA sangat diperlukan untuk perta-hanan dan keamanan negara. Salah satu kemandirian teknologi dalam pertaperta-hanan dan keamanan laut adalah teknologi kapal perang. Salah satu bagian dari teknologi sistem kapal perang adalah sistem autopilot. Sistem autopilot terdiri atas navigasi (Navigation), panduan (Guidance) dan kendali (Control) [1]. Penelitian mengenai navigasi, panduan dan kendali pada kapal khususnya kapal perang Ekstended Ko-rvet SIGMA sudah dilakukan oleh peneliti [2, 3, 4, 5, 6, 7].
Sistem autopilot kapal perang didesain agar kapal mampu melakukan misinya dengan baik tanpa awak. Jika kendali yang didesain untuk sistem autopilot kapal perang adalah kendali standar, maka kapal belum tentu berjalan dengan baik sa-at ada gangguan. Oleh karena itu, kendali robust didesain untuk sistem autopilot. Kendali robust adalah kendali yang tahan terhadap adanya gangguan. Secara nyata gangguan dapat bersifat stokastik dan deterministik. Gangguan stokastik dimisalk-an white noise Gaussidimisalk-an. Gdimisalk-anggudimisalk-an stokastik bisa diakibatkdimisalk-an addimisalk-anya kesalahdimisalk-an pemodelan matematika gerak kapal, gangguan lingkungan seperti gelombang laut. Gangguan deterministik merupakan gangguan yang dapat diukur, gangguan ini da-pat disebabkan oleh gaya akibat penembakan rudal pada kapal, gaya akibat adanya helikopter mendarat pada kapal, gangguan lingkungan yang terukur.
Tujuan khusus dari penelitian ini adalah algoritma baru kendali pengembang-an MPC kemudipengembang-an disusun sebagai software kendali optimal. Tujupengembang-an umum pene-litian ini adalah sistem autopilot kapal perang yang terintegrasi dengan penepene-litian yang sudah dan sedang dilakukan peneliti. Sistem autopilot terdiri atas navigasi, panduan dan kendali. Pengembangan sistem autopilot tersebut dengan tujuan un-tuk membenun-tuk simulator autopilot kapal perang. Studi kasus kapal perang yang digunakan dalam penelitian ini adalah kapal perang extended Korvet SIGMA (pe-ngembangan model kapal Korvet SIGMA).
Desain kendali robust kapal perang merupakan pengembangan dari Model Predictive Control(MPC). MPC merupakan metode kendali yang banyak
digunak-an oleh industri karena MPC mampu mendigunak-angdigunak-ani kendala sistem [8], selain itu MPC juga mempunyai tahapan prediksi output sistem yang akan datang sehingga bisa digunakan untuk memperbaiki perhitungan input kendali [9]. Dalam beberapa pe-nelitian yang telah dilakukan, terlihat bahwa metode MPC dapat memberikan ha-sil yang memuaskan untuk diterapkan pada sistem kendali kapal [10]. Salah satu alasan utama keberhasilan metode MPC adalah kemampuannya dalam mengatasi berbagai jenis kendala pada sistem. Akan tetapi, MPC merupakan kendali sistem yang tidak mampu mengatasi adanya gangguan [11].
Seperti pada penelitian [11] dan [10], metode Disturbance Compensating-Model Predictive Control(DC-MPC) dapat digunakan untuk menyelesaikan perma-salahan dengan adanya gangguan terukur. Metode DC-MPC merupakan pengem-bangan MPC dengan menambahkan satu tahapan untuk optimasi kendali tambah-an sebagai akibat pengaruh gtambah-anggutambah-an terukur. Berbeda halnya dengtambah-an keberadatambah-an gangguan tidak terukur (white noise) dalam sistem mengakibatkan perlunya un-tuk meneliti masalah optimisasi yang dibatasi dalam benun-tuk stokastik [12]. Sistem stokastik menyebabkan adanya perubahan kendala pada MPC standar dari bentuk deterministik menjadi probabilistik. Metode standar MPC belum mampu menyele-saikan permasalahan dengan adanya gangguan yang bersifat stokastik. Pada MPC standar prediksi output sistem dengan menggunakan model matematika dari sistem. Masalah utamanya adalah ketika noise yang melekat pada sistem diperhatikan, ma-ka estimasi output sistem tidak akurat [13]. Yan dan Bitmead menggunama-kan Kalman filter sebagai prediktor sistem stokastik linier dalam MPC.
Kemudian Oldewurtel memberikan alternatif metode lain dalam mengatasi permasalahan gangguan stokastik. Oldewurtel membahas mengenai penerapan al-goritma Stochastic Model Predictive Control (SMPC) [14]. Penelitian mengenai pengembangan stokastik MPC dengan menggunakan informasi yang akan datang dilakukan juga oleh Farrokhsiar dan Najjaran [15]. Farrokhsiar melakukan pene-litian mengenai Unscented Model Predictive Control (UMPC) pada robot mobil nonholonomic. UMPC merupakan pengembangan MPC untuk sistem taklinear de-ngan gangguan dari lingkude-ngan yang bersifat stokastik. Pada UMPC sistem dili-nearkan dengan menggunakan pelinearan statistik yaitu unscented transform dan penggunaan informasi yang akan datang dengan menggunakan Unscented Kalman Filter(UKF).
standar dengan tujuan kendali dapat menangani gangguan deterministik dan sto-kastik pada sistem linier. Modifikasi MPC dilakukan dalam dua tahap yaitu tahap pertama menghilangkan pengaruh gangguan stokastik kemudian meminimumkan pengaruh gangguan deterministik dengan menambahkan kendali tambahan sebagai kompensasi adanya gangguan deterministik. Model matematika gerak kapal direp-resentasikan dalam sistem linier. Oleh karena itu, peneliti mengajukan penelitian ini yang berjudul ”Kendali Robust Model Predictive Control Meminimumkan Pe-ngaruh Gangguan Stokastik dan Deterministik pada Kendali Gerak Kapal Perang Extended Korvet SIGMA”. Kapal Extended korvet SIGMA adalah kapal pengem-bangan dari Korvet SIGMA yang diteliti oleh tim konsorsium kapal perang sejak tahun 2011.
1.2
Perumusan dan Pembatasan Masalah
Mengacu pada latar belakang penelitian bahwa untuk mendapatkan kenda-li yang robust dikembangkan metode kendakenda-li dari pengembangan MPC sehingga mampu mengatasi gangguan stokastik dan deterministik, kemudian metode terse-but diterapkan pada kendali gerak kapal perang Extended Korvet SIGMA. Secara lebih spesifik, perumusan masalah penelitian dibagi menjadi beberapa pertanyaan penelitian, sebagai berikut
1. Bagaimana algoritma modifikasi MPC dalam menghilangkan faktor ganggu-an stokastik
2. Bagaimana algoritma modifikasi MPC dalam meminimumkan gangguan de-terministik
3. Bagaimana hasil simulasi kendali gerak kapal perang Extended Korvet SI-GMA dengan menggunakan kendali robust MPC
1.3
Tujuan
Tujuan penelitian ini adalah :
1. Menyusun dan mengkaji algoritma modifikasi MPC dalam menghilangkan faktor gangguan stokastik
2. Menyusun dan mengkaji algoritma modifikasi MPC dalam meminimumkan gangguan deterministik
3. Menganalisis hasil simulasi kendali gerak kapal Extended Korvet SIGMA dengan menggunakan kendali robust MPC
1.4
Relevansi
Peneliti memandang kajian empirik tentang permasalahan diatas penting se-cara teoritis dan praktis, manfaatnya adalah :
1. Dari studi literatur penelitian yang ada, penelitian ini penting untuk melan-jutkan penelitian yang dilakukan oleh Yan & Bitmead (2005) mengenai sto-kastik MPC dan Li & Sun (2012) mengenai DC-MPC (gangguan determinis-tik).
2. Secara praktis, penelitian ini mendukung dan mengembangkan sistem cerdas pada kendaraan nirawak terutama pada kapal perang. Sehingga mendukung kemandirian bangsa dalam pembuatan wahana nirawak baik untuk kebutuhan hankam dan sipil di bidang maritim.
3. Berdasarkan pada roadmap penelitian Laboratorium Pemodelan dan Simu-lasi Sistem Jurusan Matematika ITS yang ada pada Gambar 1.1, penelitian ini mendukung bagian dari kelompok riset ”Navigasi dan Kontrol” . Serta mendukung bidang unggulan ITS yaitu bidang kelautan.
1.5
Target Luaran
Luaran yang diharapkan dari penelitian ini adalah : 1. Jurnal internasional terindeks Scopus (Q2)
BAB 2
TINJAUAN PUSTAKA
Pada bab ini dibahas mengenai tinjauan pustaka yang digunakan dalam pe-nyusunan penelitian ini. Tinjauan pustaka yang akan dijelaskan adalah studi hasil penelitian sebelumnya.
2.1
Studi Hasil Penelitian Sebelumnya (State of The Art)
Peneliti tertarik dengan kendali MPC yang digunakan dalam metode kendali robust. Berdasarkan pada penelitian sebelumnya bahwa MPC merupakan metode kendali yang berdasarkan pada proses optimasi dan receding horizon kontrol [16]. Pada MPC terdapat dua tahap yaitu prediksi dan optimasi. Pada tahap prediksi MPC menggunakan model matematika dengan langkah prediksi sebanyak jumlah prediction horizon. Salah satu unggulan MPC adalah terdapat tahap prediksi dalam desain kendali optimalnya. Selain itu MPC juga mampu menangani adanya kendala sistem maupun kendali [17]. Menurut Joe Qin dan Bagdwell (2003), MPC meru-pakan kendali yang sangat banyak digunakan dalam industri [8]. Pengembangan MPC menjadi perhatian penting bagi para peneliti bidang kendali sehingga MPC menjadi lebih adaptif terhadap kondisi yang akan datang dan lebih robust terhadap gangguan yang ada baik yang bersifat deterministik maupun stokastik [18].
Penelitian yang dilakukan Subchan, S., dkk. (2014) mengenai kendali MPC standar untuk kendali haluan kapal Korvet SIGMA [10]. Pada Penelitian tersebut kendali MPC diterapkan pada sistem yang diberikan gangguan deterministik ber-upa gelombang berbentuk sinusoidal. Dari hasil simulasinya, MPC untuk sistem tanpa gangguan kapal mampu mengikuti sudut haluan yang diinginkan. Sedangkan pada sistem dengan adanya gangguan, sudut haluan kapal berosilasi disekitar sudut haluan kapal yang diinginkan.
Pengembangan MPC yang dilakukan oleh Jun Yan dan Robert R. Bitmead (2005) dengan menggunakan Kalman Filter (KF) sebagai prediktor pada MPC [12]. Hal tersebut dilakukan Yan dan Bitmead karena sistem dipengaruhi oleh gangguan stokastik (white noise Gaussian). Gangguan tersebut muncul akibat adanya kesa-lahan pemodelan. Sistem yang diteliti adalah sistem linier. Hasil penelitian
menun-jukkan bahwa metode MPC-KF mampu menghandel adanya gangguan stokastik. Pengembangan MPC (UMPC) juga dilakukan oleh Farrokhsiar dan Najjaran (2012) pada sistem taklinier dengan dipengaruhi gangguan dan kendala stokastik [15]. Pada penelitian tersebut prediksi dari MPC menggunakan algoritma Unscen-ted Kalman Filter(UKF). Kendali yang didesain oleh Farrokhsiar dan Najjaran di-gunakan untuk kendali formasi robot antara leader dan follower. Kendala stokastik disebabkan adanya pergerakan antar robot yang tidak pasti (bersifat stokastik). Pe-ngembangan MPC tersebut menggunakan proses pelinieran sistem dengan meng-gunakan pelinieran statistik yaitu mengmeng-gunakan unscented transform. Hasil simu-lasi menunjukkan bahwa Unscented Model Predictive Control (UMPC) merupakan kendali formasi dan pelacakan yang robust terhadap gangguan, noise pengukuran, noise komunikasi dan ketidakpastian keadaan lingkungan sekitar.
Pengembangan lain MPC dengan adanya gangguan deterministik pada sis-tem yaitu metode Disturbance Compensating Model Predictive Control (DC-MPC). Metode DC-MPC dapat digunakan pada sistem linier diskrit dengan adanya gang-guan deterministik. Pada DC-MPC terdapat tahapan mengoptimasi nilai kenda-li tambahan akibat adanya gangguan. DC-MPC dikembangkan oleh Li dan Sun (2012) untuk mendapatkan kendali haluan kapal kontainer S175 dengan gangguan berupa gelombang laut [11]. Model yang digunakan adalah model matematika pe-nurunan Nomoto orde ke-2 dengan satu derajat kebebasan yaitu yaw dan satu ken-dali input berupa sudut kemudi. Pada penelitian tersebut, gelombang laut sinusiodal dipilih sebagai gangguan pada sistem. Penelitian Li dan Sun (2012) juga memban-dingkan secara implisit antara penerapan metode DC-MPC dengan M-MPC (MPC dengan gangguan) yang dikembangkan pada penelitian sebelumnya. Hasil simulasi menunjukkan bahwa metode DC-MPC lebih baik daripada MPC, dengan metode DC-MPC pergerakan sistem tetap berada pada kendala yang ditentukan, mampu mengeliminasi efek gangguan dan mengurangi osilasi pada sistem dan kendali.
Penelitian yang dilakukan oleh peneliti (2019) adalah mengenai kendali DC-MPC untuk sistem linier kapal dengan gangguan deterministik [19]. Gangguan deterministik akibat adanya gelombang. Berdasarkan hasil simulasi kapal mampu untuk mengikuti lintasan Dubins dengan baik saat terdapat gangguan Kendali DC-MPC mampu mereject gangguan sehingga tampak seperti tanpa adanya gangguan yang berpengaruh pada sistem.
oleh peneliti (2019) dengan menggunakan DC-MPC [20]. Hasil simulasi menun-jukkan bahwa kapal tetap stabil saat menembakkan rudal.
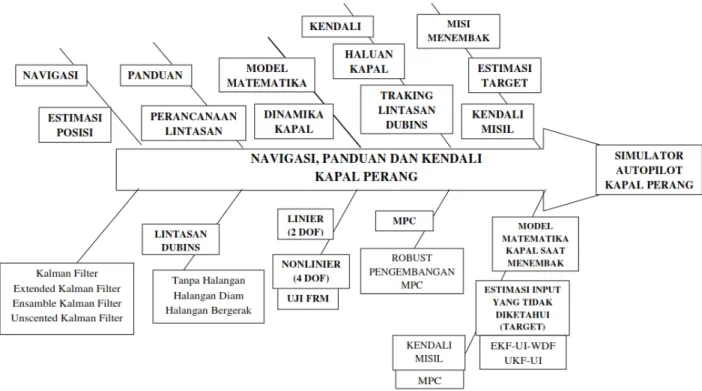
State of the art tersebut melatarbelakangi adanya penelitian ini. Road map penelitian yang sudah dan sedang dilakukan peneliti diberikan pada Gambar 2.1. Tujuan umum atau jangka panjang penelitian adalah simulator autopilot kapal per-ang. Kapal perang dapat menjalankan misinya dengan baik meskipun tanpa campur tangan manusia. Sistem autopilot kapal perang terdiri atas navigasi, panduan dan kendali. Pada penelitian ini fokus pada kendali. Sebelum mendesain kendali dibu-tuhkan model matematika gerak kapal linier yang sudah didapatkan pada penelitian sebelumnya (2017-2019) [21]. Pada penelitian ini didesain kendali haluan kapal perang dengan algoritma baru yang robust dengan menggunakan pengembangan MPC.
BAB 3
METODE PENELITIAN
Bab ini menjelaskan langkah-langkah yang digunakan dalam penyelesaian masalah pada penelitian. Disamping itu, dijelaskan pula prosedur dan proses pelak-sanaan tiap-tiap langkah yang dilakukan dalam menyelesaikan penelitian.
3.1
Tahapan Penelitian
Adapun tahapan penelitian ini adalah sebagai berikut: 1. Studi Pendahuluan
Pada tahap ini, dilakukan studi literatur mengenai sistem gerak kapal, dan gangguan pada kapal perang misal gangguan gelombang laut, gangguan aki-bat penembakan rudal. Kajian tentang metode kendali, khususnya MPC. Ka-jian tentang algoritma estimasi terutama Kalman filter.
2. Membentuk model gerak kapal dan gangguan baik stokastik maupun deter-ministik
Pada tahap ini, dilakukan pembentukan model matematika untuk sistem ge-rak kapal Extended Korvet SIGMA dengan pendekatan model sistem linear yang memperhitungkan dua derajat kebebasan yaitu sway, yaw. Kemudian di-lakukan pendiskritan untuk mendapatkan model waktu diskrit. Pembentukan model matematika gangguan baik stokastik maupun deterministik.
3. Analisa keterkontrolan dan keteramatan model sistem dinamik kapal yang diperoleh dari tahap (2)
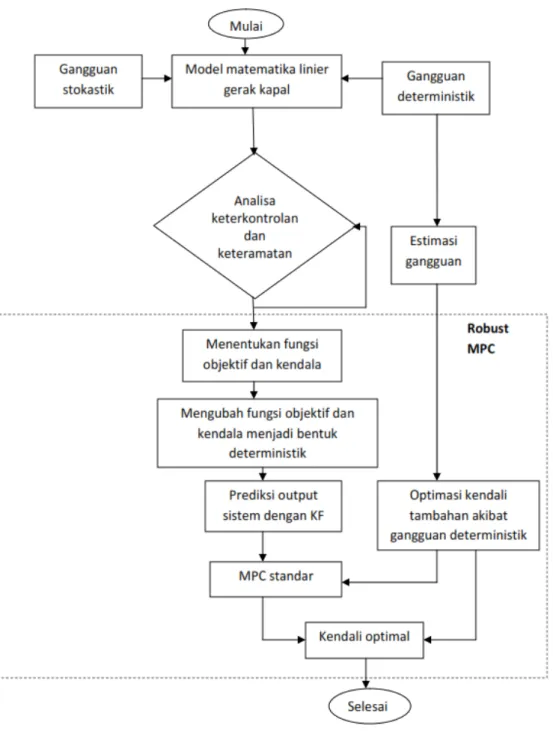
4. Menyusun dan Mengkaji Metode Robust MPC dengan stokastik predictor Memodifikasi metode MPC pada sistem linier dengan gangguan sistem. Gangguan sistem terdiri atas gangguan deterministik terukur dan gangguan stokastik. Karena sistem dipengaruhi oleh gangguan stokastik maka sistem bersifat acak. Oleh karena itu dibutuhkan prediktor untuk sistem yang bersi-fat acak atau stokastik. Gangguan stokastik didekati dengan white Gaussian noisemaka prediktor yang digunakan adalah Kalman filter.
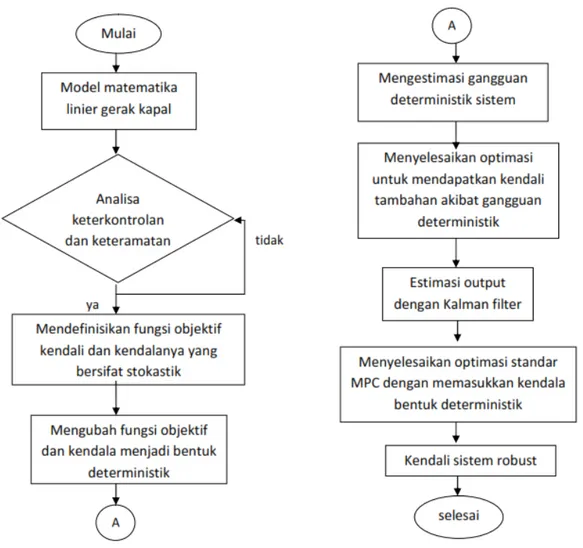
Gangguan deterministik yang mempengaruhi sistem akan ditangani oleh ken-dali tambahan sehingga sistem seolah-olah tidak dipengaruhi oleh gangguan tersebut. Pada tahap ini, metode MPC dikembangkan agar robust terhadap gangguan sistem, adapun tahapannya adalah sebagai berikut dan diberikan pada Gambar 3.1
i Mengubah fungsi objektif, model sistem, kendala dari stokastik menjadi deterministik
ii Mengestimasi gangguan deterministik sistem
iii Menyelesaikan optimasi untuk mendapatkan kendali tambahan akibat gangguan deterministik
iv Menyelesaikan optimasi standar MPC dengan memasukkan batas ken-dali state dan input
v Mengestimasi output dengan menggunakan Kalman Filter
vi Mendapatkan kendali optimal dengan menjumlahkan hasil optimasi po-in (iii) dan (iv) ke dalam sistem
5. Simulasi numerik dan analisis penerapan kendali robust MPC pada sistem Gerak Kapal Extended Korvet SIGMA
6. Penarikan kesimpulan, saran dan penulisan draft artikel
Pada tahap ini dilakukan penarikan kesimpulan dari hasil penelitan yang te-lah dilakukan sebelumnya selanjutnya diberikan saran perbaikan yang dapat dilakukan pada penelitian yang dilakukan sehingga dapat diperbaiki pada pe-nelitian selanjutnya.
Tahapan penelitian diberikan dalam diagram alir pada Gambar 3.2.
3.2
Organisasi Tim Peneliti
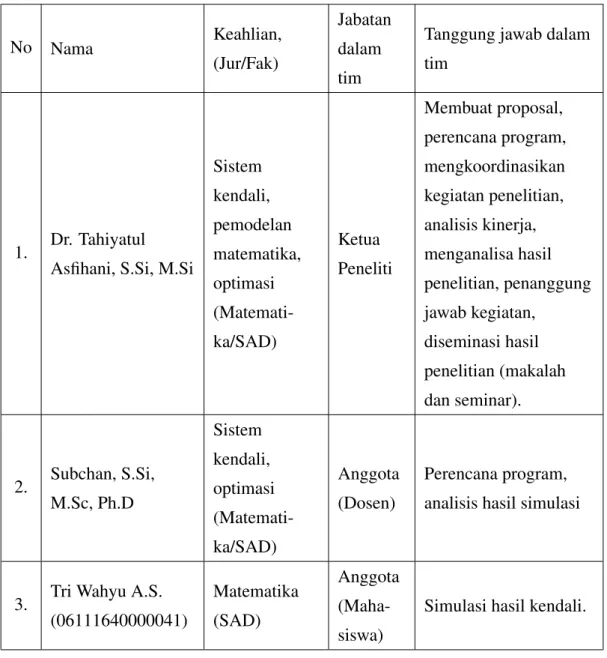
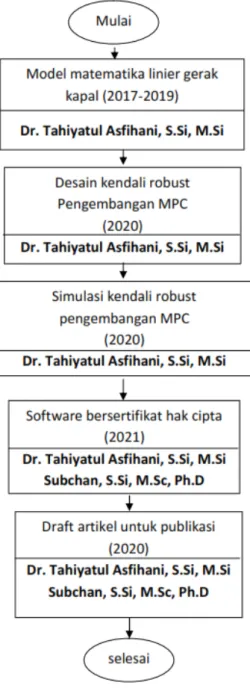
Tim penelitian terdiri atas dosen dan mahasiswa. Organisasi tim penelitian diberikan pada Tabel 3.1. Berdasarkan pada tahapan penelitian, tugas anggota tim diberikan sesuai dengan bidang keahlian. Tugas tim penelitian ditunjukkan pada Gambar 3.3.
Tabel 3.1: Organisasi Tim Peneliti No Nama Keahlian, (Jur/Fak) Jabatan dalam tim
Tanggung jawab dalam tim
1. Dr. Tahiyatul Asfihani, S.Si, M.Si
Sistem kendali, pemodelan matematika, optimasi (Matemati-ka/SAD) Ketua Peneliti Membuat proposal, perencana program, mengkoordinasikan kegiatan penelitian, analisis kinerja, menganalisa hasil penelitian, penanggung jawab kegiatan, diseminasi hasil penelitian (makalah dan seminar). 2. Subchan, S.Si, M.Sc, Ph.D Sistem kendali, optimasi (Matemati-ka/SAD) Anggota (Dosen) Perencana program, analisis hasil simulasi
3. Tri Wahyu A.S. (06111640000041) Matematika (SAD) Anggota (Maha-siswa)
BAB 4
JADWAL DAN RANCANGAN ANGGARAN BIAYA
4.1
Rencana Jadwal Kegiatan Penelitian
No Nama Bulan
1 2 3 4 5 6 7 8
1. Studi Pendahuluan
2.
Membentuk Model Gerak Kapal dan Gangguan baik stokastik maupun deterministik
3. Analisa keterkontrolan dan keteramatan sistem
4. Menyusun dan Mengkaji metode robust MPC dengan stokastik perdiktor
5. Simulasi dan analisis hasil simulasi 6. Penarikan kesimpulan dan saran 7. Penulisan laporan dan makalah
4.2
Rancangan Anggaran Biaya
Rekapitulasi Anggaran
Uraian Sumber Dana
APBN Mitra Industri (Non APBN)
Honor 3.500.000
Belanja bahan 9.450.000
Belanja barang non operasional 24.050.000
Belanja perjalanan 13.000.000
1. Honor
No Item Honor Kegiatan Volu-me Satu-an Honor (Rp.) Total (Rp) 1. HR. Sekretariat Peneliti 5 bulan 300.000 1.500.000 2. HR. Pembantu Peneliti 80 jam 25.000 2.000.000 SUB TOTAL 3.500.0002. Belanja Bahan
No Item Bahan Volume Satuan
Harga Satuan
(Rp)
Total (Rp)
1. Toner Cartridge HP color
laserjet CP1515n 4
tube
toner 950.000 3.800.000
2. Kertas HVS A4 5 rim 35.000 175.000
3. Modem mifi 4G LTE 1 buah 576.000 576.000
4. Paket data 10 Gb 8 buah 150.000 1.200.000
5. Eksternal hardisk 1 Tb 2 buah 995.000 1.990.000
6. Toshiba Hayabusa 32 Gb 3 buah 120.000 360.000
7. Konsumsi rapat 25 orang 35.000 875.000
8. Fotokopi 2.070 lembar 200 414.000
9. Penjilidan 6 buah 10.000 60.000
3. Belanja Barang Non Operasional
No Item Barang Volume Satuan
Harga Satuan
(Rp)
Total (Rp)
1. Referensi buku teks 1 paket 1.550.000 1.550.000
2. Sewa laptop 5 bulan 2.500.000 12.500.000
3. Sewa printer laser 5 bulan 700.000 3.500.000
4. Submit jurnal 1 buah 6.500.000 6.500.000
SUB TOTAL 24.050.000
4. Belanja Perjalanan
No Item Bahan Volume Satuan
Biaya Satuan (Rp) Total (Rp) 1. Pembayaran international conference di dalam negeri 2 orang 3.500.000 7.000.000 2. Perjalanan international conference dalam negeri 2 orang 3.000.000 6.000.000 SUB TOTAL 13.000.000
[1] Subchan and R. Zbikowski, Computational Optimal Control : Tools and Pra-ctice. John Wiley and Sons Ltd, 2009.
[2] T. Asfihani and S. Subchan, “Penerapan model predictive control (mpc) dan unscented kalman filter (ukf) pada panduan dan kendali kapal tanpa awak de-ngan lintasan tertentu,” Konferensi Nasional Matematika XVI, UNPAD, 2012. [3] T. Asfihani and S. Subchan, “Panduan dan kendali kapal tanpa awak de-ngan menggunakan metode model predictive control (mpc) dan akar kuadrat-unscented kalman filter (ak-ukf),” Seminar Nasioanal Matematika dan Pendi-dikan Matematika, UNY-Yogyakarta, 2012.
[4] Subchan and T. Asfihani, “The missile guidance estimation using exten-ded kalman filter-unknown input-without direct feedthrough (ekf-ui-wdf) me-thod,” Journal of the Indonesian mathematical society (JIMS), vol. 19, no. 1, pp. 1–14, 2013.
[5] S. Cahyaningtias, T. Asfihani, and S. S., “Application of disturbance compen-sating model predictive control (dc-mpc) on ship heading system,” Proc. South East Asian Conference on Mathematics and its Application (SEACMA 2013), 2013.
[6] T. Asfihani, Subchan, S. T. Lia, and E. Apriliani, “Kendali kemudi kapal de-ngan nonlinear backstepping,” Proc. Seminar nasional SITIA, Teknik Elektro ITS, Surabaya, 2012.
[7] T. Asfihani, Subchan, D. Adzkiya, D. M. Rosyid, H. Purnawan, and R. Ka-milah, “Estimation of the corvette sigma motion in missile firing mission,” in 2017 5th International Conference on Instrumentation, Control, and Automa-tion (ICA), pp. 203–207, Aug 2017.
[8] S. J. Qin and T. A. Badgwell, “A survey of industrial model predictive control tecnology,” Control engineering Practice, 2003.
[9] L. Wang, Model Predictive Control System Design and Implementation Using MATLAB. Springer, 2009.
[10] Subchan, W. H. Syaifudin, and T. Asfihani, “Ship heading control of corvette-sigma with disturbances using model predictive control,” Far East Journal of Applied Mathematics, vol. 87, no. 3, pp. 245–256, 2014.
[11] Z. Li and J. Sun, “Disturbance compensating model predictive control with application to ship heading control,” IEEE Transaction on Control System Te-chnology, vol. 20, pp. 257–264, January 2012.
[12] J. Yan and R. R. Bitmead, “Model predictive control and state estimation: A network example,” IFAC, 2002.
[13] J. Yan and R. R. Bitmead, “Incorporating state estimation into model predicti-ve control and its application to network traffic control,” Automatica, 2005. [14] F. Oldewurtel, C. N. Jones, A. Parisio, and M. Morari, “Stochastic model
predictive control for building climate control,” IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, 2014.
[15] M. Farrokhsiar and H. Najjaran, “An unscented model predictive control app-roach to the formation control of nonholonomic mobile robots,” IEEE Inter-national Conference on Robotics & Automation, 2012.
[16] D. Q. Mayne, “Model predictive control : Recent developments and future promise,” Automatica, 2014.
[17] W.-H. Chen and P. J. G. Donald J. Ballance, “Optimal control, of nonlinear systems : a predictive control approach,” Automatica, 2003.
[18] D. Q. Mayne and P. O. M. S. J. B. Rawlings, C. V. Rao, “Constrained model predictive control : Stability and optimality,” Automatica, 2000.
[19] T. Asfihani, S. Subchan, D. M. Rosyid, and A. Sulisetyono, “Dubins path tracking controller of usv using model predictive control in sea field,” Journal of Engineering and Applied Sciences, vol. 14.
[20] H. Purnawan, T. Asfihani, D. Adzkiya, et al., “Disturbance compensating mo-del predictive control for warship heading control in missile firing mission,” in Journal of Physics: Conference Series, vol. 1108, p. 012035, IOP Publishing, 2018.
[21] T. Asfihani, D. Adzkiya, D. M. Rosyid, H. Purnawan, R. Kamilah, et al., “Es-timation of the corvette sigma motion in missile firing mission,” in 2017 5th International Conference on Instrumentation, Control, and Automation (ICA), pp. 203–207, IEEE, 2017.
LAMPIRAN BIODATA TIM PENELITI 1. Ketua Peneliti
a. Nama Lengkap : Dr. Tahiyatul Asfihani, S.Si, M.Si
b. Jenis Kelamin : Perempuan
c. NIP : 198707282014042001
d. Fungsional/Pangkat/Gol : Asisten ahli/Penata Muda Tk. I/III b e. Jabatan Struktural :
-f. Bidang Keahlian : Sistem Kendali, Optimasi, Pemodelan matematika
g. Fakultas/Jurusan : FSAD/Matematika h. Alamat Rumah dan No.
Telp. :
Jl. Sunan Giri XIII Q baru. no. 13, Gresik (081330335575)
i. Riwayat penelitian (2
yang relevan) :
-No. Judul Penelitian Peran dalam Tim Sumber
Dana Tahun
1.
Panduan dan Kendali Kapal Perang Autopilot untuk Menghindari Tabrakan Berdasarkan Data AIS
Anggota DRPM RISTE-KDIKTI 2020-2023 2.
Desain Kendali Robust dengan Modifikasi Model Predictive Control-Kalman Filter pada Kendali Kapal Perang Extended Korvet SIGMA
Ketua Lokal ITS 2019
No. Judul Paper Penerbit Tahun
1.
Dubins Path Tracking Controller of USV using Model Predictive Control in Sea Field
Journal of Engineering
and Applied Sciences 2019
2.
Ship Heading Control for Dubins Path Tracking and Collision Avoidance using Model Predictive Control 2019 International Conference on Information and Communications Technology (ICOIACT) 2019 k. Paten : -l. Tugas Akhir :
No. Nama Mahasiswa NRP Judul Tugas Akhir Tahun
1. Mirzaq Khoirul M.
06111540000008 (S1)
Model Predictive Control (MPC) pada Kendali Misil dengan Target Bergerak
2019
2. Rudat Ilaina 06111540000058 (S1)
Estimasi Koefisien Hidrodinamika Kapal Menggunakan Ensemble Kalman Filter dan Recursive Least Square
2. Anggota Peneliti
a. Nama Lengkap : Subchan, S.Si, M.Sc, Ph.D b. Jenis Kelamin : Laki-laki
c. NIP : 197105131997021001
d. Fungsional/Pangkat/Gol : Lektor Kepala/ e. Jabatan Struktural :
-f. Bidang Keahlian : Sistem Kendali, Optimasi g. Fakultas/Jurusan : FSAD/Matematika h. Alamat Rumah dan No.
Telp. :
i. Riwayat penelitian (2
yang relevan) :
-No. Judul Penelitian Peran dalam Tim Sumber
Dana Tahun
1.
Panduan dan Kendali Kapal Perang Autopilot untuk Menghindari Tabrakan Berdasarkan Data AIS
Ketua DRPM RISTE-KDIKTI 2020-2023 2.
Desain Kendali Robust dengan Modifikasi Model Predictive Control-Kalman Filter pada Kendali Kapal Perang Extended Korvet SIGMA
Anggota Lokal ITS 2019
No. Judul Paper Penerbit Tahun
1.
Dubins Path Tracking Controller of USV using Model Predictive Control in Sea Field
Journal of Engineering
and Applied Sciences 2019
2.
Ship Heading Control for Dubins Path Tracking and Collision Avoidance using Model Predictive Control 2019 International Conference on Information and Communications Technology (ICOIACT) 2019 k. Paten : -l. Tugas Akhir :
No. Nama Mahasiswa NRP Judul Tugas Akhir Tahun
1. Mirzaq Khoirul M.
06111540000008 (S1)
Model Predictive Control (MPC) pada Kendali Misil dengan Target Bergerak 2019 2. Tahiyatul Asfihani 04111160012002 (S3)
Panduan dan Kendali Kapal Perang Menggunakan Pengembangan Model Predictive Control (MPC) dengan Gangguan Gelombang
DATA USULAN DAN PENGESAHAN PROPOSAL DANA LOKAL ITS 2020
1. Judul Penelitian
Kendali Robust Model Predictive Control Meminimumkan Pengaruh Gangguan
Stokastik dan Deterministik pada Kendali Gerak Kapal Perang Extended Korvet SIGMA
Skema : PENELITIAN DOKTOR BARU
Bidang Penelitian : Internet of Things dan Teknologi Pertahanan
Topik Penelitian : Teknologi Pertahanan - Teknologi pendukung daya gerak 2. Identitas Pengusul
Ketua Tim
Nama : Dr. Tahiyatul Asfihani S.Si., M.Si NIP : 198707282014042001
No Telp/HP : 081330335575
Laboratorium : Laboratorium Pemodelan dan Simulasi Sistem Departemen/Unit : Departemen Matematika
Fakultas : Fakultas Sains dan Analitika Data Anggota Tim
No Nama Lengkap Asal Laboratorium Departemen/Unit Perguruan Tinggi/Instansi 1 Dr. Tahiyatul Asfihani S.Si., M.Si Laboratorium Pemodelan dan Simulasi Sistem Departemen Matematika ITS 2 Subchan S.Si., M.Sc., Ph.D Departemen Matematika ITS 3. Jumlah Mahasiswa terlibat : 1
4. Sumber dan jumlah dana penelitian yang diusulkan
a. Dana Lokal ITS 2020 : b. Sumber Lain :
50.000.000,-Tanggal Persetujuan Nama Pimpinan Pemberi Persetujuan Jabatan Pemberi Persetujuan Nama Unit Pemberi Persetujuan QR-Code 09 Maret 2020 Dr. Dhany Arifianto ST.,M.Eng. Kepala Pusat Penelitian/Kajian/Unggulan Iptek Internet of Things dan Teknologi Pertahanan 09 Maret 2020 Agus Muhamad Hatta , ST, MSi, Ph.D Direktur Direktorat Riset dan Pengabdian Kepada Masyarakat