ANALISIS PENGENDALIAN MOTOR DC
MENGGUNAKAN LOGIKA PID DENGAN
MIKRO KONTROLER
ATMEGA 8535
Ruzita Sumiati
(1) (1)Staf Pengajar Teknik Mesin Politeknik Negeri Padang
ABSTRACT
The DC motor was often used in various fields, from the industrial field; domestic equipment evens the child's toy. DC Motor is a common used actuator either in speed control system or position control system. Microcontroller technology and PWM enabled us to make various digital controls with the large computation capacity but consumption of the power is low. The capability pursued set point and the keep of the motor speed when the load is changed are the performance parameters of the control speed quality.
It’s important to make a control system for dc motor. One of the most well-known control systems is proportional integral derivative (PID) and widely used in industrial field. This control system has fast response, no offset and no oscillation and very suitable for plant with low disturbance. There are plenty of microcontroller applications in control system. ATMega 8535 is a microcontroller which has integrated pulse width modulation (PWM) module to control a plant. PID algorithm will be injected to this microcontroller memory. With PID control Methods Ziegler-Nichols, the dc motor is expected to reach stable and the keep of the motor speed when the load is changed are the performance parameters of the control speed quality
Keywords: PID algorithm, Control DC Motor
1. PENDAHULUAN
Penelitian ini berangkat dari sangat variatifnya penggunaan motor DC diberbagai bidang mulai dari
perangkat industri sampai peralatan rumah tangga
bahkan alat permainan anak-anak. Contoh
penggunaannya seperti pada mesin bubut, milling, mesin pemintal benang, mesin penggerak antena
penerima satelit, mobil-mobilan dan lain
sebagaianya.
Perkembangan teknologi elektronika memungkinkan
dibuat perangkat pengendali untuk motor DC
tersebut dengan ukuran yang kecil, akan tetapi memiliki kemampuan komputasi, kecepatan dan keandalan yang tinggi seperti dengan menggunakan mikrokontroller. Mikrokontroler adalah suatu chip yang telah dilengkapi fasilitas-fasilitas tambahan seperti memori, ADC, port serial atau port paralel. Kemampuan menjaga kecepatan agar tetap sesuai dengan set point ketika diberi beban maupun kemampuan sistem untuk mengejar kecepatan agar mencapai set point ketika motor mulai beputar menjadi faktor yang sangat penting sebagai ukuran kinerja pengendali kecepatan motor, oleh karena itu
banyak penelitian yang bertujuan untuk
meningkatkan kinerja motor tersebut.
Salah satu contoh untuk meningkatkan kinerja motor DC adalah dengan menggunakan kendali PID. Berdasarkan survey, 97% otomasi industri yang
bergerak dibidang proses menggunakan PID sebagai komponen utama dalam pengontrolannya (sumber: Honeywell, 2000). Kontrol PID telah diterapkan di industri secara luas sejak 1930-an. Khususnya kontrol PID tunning Ziegler-Nichols digunakan sebagai komponen kontrol proses dilatarbelakangi karena kesederhanaan struktur serta kemudahan dalam melakukan tunning parameter kontrolnya dan tidak ditekankannya penurunan model matematik
komponen yang akan diatur (plant) sehingga
implementasi sistem kendali lebih sederhana.
2. TINJAUAN PUSTAKA 2.1 Dasar Sistem Kendali
Sistem kendali telah memegang peranan yang sangat penting dalam perkembangan ilmu dan teknologi. Peranan sistem kendali meliputi semua bidang kehidupan. Dalam peralatan, misalnya proses pada industri pesawat terbang, peluru kendali, pesawat
ruang angkasa, dan lain-lain. Sistem kendali yang
semakin berkembang dapat meningkatkan kinerja
sistem, kualitas produksi, dan menekan biaya
produksi.
2.1.1 Kendali PID
Pengendali PID ini paling banyak dipergunakan karena sederhana dan mudah dipelajari serta tuning parameternya. Lebih dari 95% proses di industri
Jurnal Teknik Mesin Vol. 6, No.2,Desember 2009 ISSN 1829-8958
98 merupakan gabungan dari pengedali proportional (P),
integral (I), dan derivative (D). Berikut ini
merupakan blok diagram dari sistem pengendali dengan untai tertutup (closed loop):
Gambar 1 Diagram Blok Closed Loop[6]
dimana:
Plant : sistem yang akan dikendalikan
Controller : Pengendali yang memberikan respon untuk memperbaiki respon
E : error = R - pengukuran dari sensor
out out out
I
D
P
t
MV
(
)
... (1)Variabel yang nilai parameternya dapat diatur disebut Manipulated variable (MV) biasanya sama dengan keluaran dari pengendali (u(t)). Keluaran pengendali PID akan mengubah respon mengikuti perubahan yang ada pada hasil pengukuran sensor dan set point
yang ditentukan. Pembuat dan pengembang
pengendali PID menggunakan nama untuk
mengidentifikasi ketiga mode pada pengendali yaitu: P (Kp )= Konstanta Proportional
I (Ki) =
s
T
i1
=Ki/s= Konstanta Integral
D (Kd) =
dt
t
e
d
T
d)
(
= Konstanta Derivative Atau secara umum persamaannya adalah sebagai berikut :
t d i p d i P dt t e d T dt t e T t e K dt t e d T dt t e T K 0 ) ( ) ( 1 ) ( ) ( ) ( 1 ... (2) …(2)Karakteristik pengendali PID
Sebelum membahas tentang karakteristik Pengendali PID maka perlu diketahui bentuk respon keluaran yang akan menjadi target perubahan yaitu :
Gambar 2. Grafik Karakteristik kendali[6]
Tabel 1. Karakteristik Masing-masing pengendali
CL RESPONS E RISE TIME OVERSHOO T SETTLIN G TIME Stabilit y Kp Decreas e Increase Small Change Decreas e Ki Decreas e Increase Increase Eliminat e Kd Small
Change Decrease Decrease Increase
Metode Tuning PID Ziegler Nichols
Metode penentuan parameter pengontrol PID Ziegler Nichols memiliki kelebihan dibandingkan dengan metode klasik. Salah satu kelebihan tersebut adalah tidak ditekankannya penurunan model matematik komponen yang akan diatur (plant). Perhitungan
parameter-parameter pengontrol proporsional,
integral dan diferensial PID hanya dilakukan untuk menentukan ultimate gain Ku dan ultimate period Tu dari respon step sebuah plant
Gambar 3 Menunjukkan blok diagram kontroler PID[8]
Penalaan parameter kontroller PID selalu didasari atas tinjauan terhadap karakteristik yang diatur (Plant). Dengan demikian betapapun rumitnya suatu plant, perilaku plant tersebut harus diketahui terlebih
dahulu sebelum penalaan parameter PID itu
dilakukan. Karena penyusunan model matematik plant tidak mudah, maka dikembangkan suatu metode eksperimental. Metode ini didasarkan pada reaksi plant yang dikenai suatu perubahan. Dengan menggunakan metode itu model matematik perilaku
plant tidak diperlukan lagi, karena dengan
menggunakan data yang berupa kurva keluaran, penalaan kontroler PID telah dapat dilakukan.
Penalaan bertujuan untuk mendapatkan kinerja
sistem sesuai spesifikasi perancangan. Ogata
menyatakan hal itu sebagai alat control (controller tuning) (Ogata, 1997, 168, Jilid 2).
Metode Ziegler-Nichols pertama kali
memperkenalkan metodenya pada tahun 1942.
Metode ini memiliki dua cara, metode osilasi dan
kurva reaksi. Kedua metode ditujukan untuk
menghasilkan respon sistem dengan lonjakan
maksimum sebesar 25%. Gambar (”4”)
Gambar 4 Kurva respons memperlihatkan 25 %
lonjakan maksimum[8]
Metode Osilasi
Metode ini didasarkan pada reaksi sistem untaian tertutup. Plant disusun serial dengan kontroller PID. Semula parameter parameter integrator disetel tak berhingga dan parameter diferensial disetel nol (Ti = ~ ;Td = 0). Parameter proporsional kemudian dinaikkan bertahap. Mulai dari nol sampai mencapai harga yang mengakibatkan reaksi sistem berosilasi. Reaksi sistem harus berosilasi dengan magnitud tetap (Sustain oscillation) (Guterus, 1994, 9-9). Gambar berikut menunjukkan rangkaian untaian tertutup pada cara osilasi.
Gambar 5 Sistem untaian tertutup dengan alatkontrol proporsional[8]
Nilai penguatan proportional pada saat sistem
mencapai kondisi sustain oscillation disebut ultimate gain Ku. Periode dari sustained oscillation disebut ultimate period Tu (Perdikaris, 1991, 433).
Gambar 6 Kurva respon sustain oscillation[8]
Penalaan parameter PID didasarkan terhadap kedua konstanta hasil eksperimen, Ku dan Pu. Ziegler dan Nichols menyarankan penyetelan nilai parameter Kp,
Ti, dan Td berdasarkan rumus yang diperlihatkan pada ”Tabel ( 2)”
Tabel 2 Penalaan paramater PID dengan metode osilasi
Tipe Kontroler Kp Ti Td
P 0,5.Ku
PI 0,45.Ku Pu1/1,2
PID 0,6.Ku 0,5 Pu 0,125
Pu
2.1.2 Pulsa With Modulation (PWM)
Salah satu metoda yang sering digunakan dalam
pengaturan kecepatan motor DC dengan
menggunakan mikrokontroler adalah dengan Pulse Width Modulation (PWM), Kecepatan motor listrik tergantung dari daya yang diberikan (atau sebanding dengan tegangan supply ketika arus konstan). Makin besar tegangan, maka semakin cepat putaran suatu motor listrik. PWM merupakan suatu teknik yang baik untuk mengendalikan rangkaian analog dengan keluaran digital suatu mikroprosesor
Gambar 7 Duty cycle[10]
Dari ”Gambar (7)”, jika digunakan tegangan sumber (Vs) mencapai 12V, maka pada duty cycle 10% di atas keluaran PWM ini bernilai 1,2 V. Demikian juga pada duty cycle 50% keluaran PWM bernilai 6V, dan pada duty cycle 90% keluaran PWM bernilai 10,8V.
Ini berarti dengan menggunakan keluaran
mikrokontroler sebesar 5V, rangkaian analog yang membutuhkan sumber tegangan lebih dari 5V dapat dikendalikan dengan menggunakan prinsip PWM ini. Penggunaan PWM ini dapat digunakan dalam
mengendalikan putaran motor yaitu melalui
perubahan duty cyle PWM atau lebar pulsa PWM. Ketika duty cycle 0%, maka motor akan berhenti total karena tidak terdapat beda tegangan. Ketika
Jurnal Teknik Mesin Vol. 6, No.2,Desember 2009 ISSN 1829-8958
100 duty cycle 100%, maka motor berputar penuh karena
keluaran dari PWM 12V terus menerus. Ketika PWM dalam kondisi 50% maka motor berputar dengan kecepatan setengah kecepatan maksimalnya karena tegangan rata-rata yang diberikan setengah dari tegangan penuh.
2.1.3 Microkontroler Atmega 8535
Mikrokontroler AVR (Alf and Vegard’s Risc
processor) memiliki arsitektur RISC (Reduced
Instruction Set Computing) 8 bit, dimana semua instruksi dikemas dalam kode 16 bit dan sebagian besar instruksi dieksekusi dalam satu siklus clock. Secara umum, AVR dapat dikelompokkan menjadi 4 kelas, yaitu keluarga ATtiny, keluarga AT90Sxx, keluarga ATmega, dan AT86RFxx.
Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral, dan fungsinya. Sedangkan dari segi arsitektur dan instruksi yang digunakan, keempat keluarga ini hampir sama . ATmega 8535 yang terdiri dari 40 pin. Sebagian besar pin-pin ATmega ini (32 pin) terbagi dalam 4 port untuk input/output (I/O), yaitu port A, port B, port C, dan portD. Masing-masing pin memiliki
fungsi sebagai general digital bidirectional
input/output dan memiliki internal pull-up resistor Untuk mengatur fungsi port I/O sebagai masukan ataupun keluaran, perlu dilakukan setting pada DDR
dan port. Port I/O sebagai keluaran hanya
memberikan arus sourcing sebesar 20mA sehingga
untuk menggerakkan motor atau kendali alat
elektronis yang lain, perlu diberikan penguat
tambahan.
Namun selain dapat digunakan untuk I/O port, sebagian besar dari pin-pin ini juga memiliki option
fungsi khusus, seperti yang ditunjukkan pada Gambar
II.4. Port I/O pada mikrokontroler ATmega8535
dapat difungsikan sebagai masukan ataupun keluaran dengan keluaran high atau low.
Gambar 8 Mikrokontroler AVR ATmega 8535[11]
3. PERANCANGAN SISTEM
Dalam perancangan sistem kendali motor DC, terlebih dahulu harus dianalisa hardware yang akan diperlukan dalam pengontrolan motor DC setelah itu dilakukan perancangan software. Kendali kecepatan dan posisi motor DC menggunakan mikrokontroler ATmega8535 dengan kontrol PID metode tuning
Ziegler-Nichols diagram blok kontrolnya dapat
dilihat pada gambar berikut:
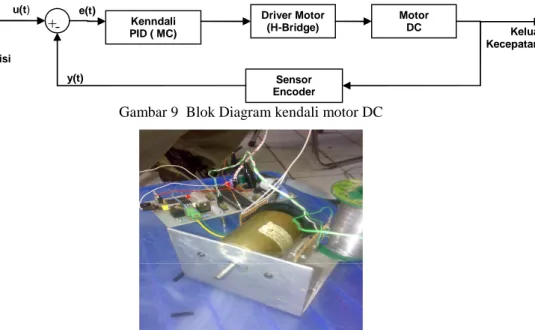
Keluaran Kecepatan / Posisi Kenndali PID ( MC) Driver Motor (H-Bridge) Motor DC Sensor Encoder
+-u(t) y(t) e(t) Set point Kecepatan/PosisiGambar 9 Blok Diagram kendali motor DC
Dari blok diagram diatas terlihat bahwa sistem control motor bekerja dengan mengumpan balikan kecepatan atau posisi motor yang terbaca oleh sensor dan membandingkan dengan set poin motor yang diinginkan. Berdasarkan error antara kecepatan atau posisi motor yang terbaca oleh sensor dengan set
point yang diinginkan control PID melalui
mikrokontroler ATmega8535 akan melakukan
perhitungan untuk meminimalisir nilai error
sehingga mencapai nilai set point.
Sebagai komponen pendukung kendali motor DC dengan mikrokontroler digunakan PC, driver motor DC, sensor encoder, dan komunikasi data serial. PC berguna untuk akusisi data . Driver motor berfungsi sebagai mengatur suplai daya, tegangan PWM yang
dihasilkan mikrokontroler tidak cukup untuk
menggerakkan motor dengan spesifikasi tegangan di atas 5V, karena itu dibutuhkan driver atau H-Bridge
yang berlaku sebagai penguat daya untuk mendrive arus pada motor sehingga motor dapat berputar semestinya. Rangkaian H-Bridge juga digunakan untuk memberikan kemampuan pada mikrokontroler untuk dapat memutar motor secara bolak-balik (dua arah). Sensor encoder berfungsi sebagai umpan balik
kendali. Sedangkan USART berfungsi untuk
komunikasi data serial antara PC dan mikrokontroler.
4. ANALISA
Tahap implementasi ini terdiri dari pengujian hasil
rancangan dan menganalisa seberapa tingkat
keberhasilan hasil rancangan yang telah dibuat.
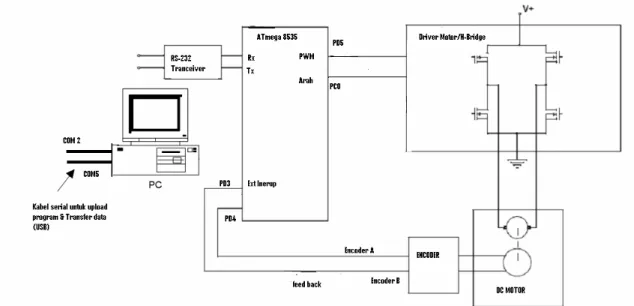
4.1 Implementasi Alat
Set up Perangkat keras pengontrol motor DC secara keseluruhan adalah sebagai berikut:
Gambar 11 Set up perangkat keras kontrol motor DC
4.2 Pengujian
4.2.1 Pengujian Perhitungan Pulsa
Pengujian perhitungan pulsa dilakukan berdasarkan jumlah pulsa yang terbaca oleh encoder selama motor berputar. Pada mikrokontroler menu external IRQ diaktifkan interupsi ekternal0 dengan mode yang dipilih rising edge sehingga setiap terjadi kondisi dari low ke high pada kaki PD2 harga pulsa akan bertambah satu atau register TCNT0 akan bertambah satu. Piringan encoder yang digunakan mempunyai
celah 22 buah jadi untuk satu putaran atau 360o
encoder akan memberikan 22 pulsa.
4.2.2 Pengujian Arah Putaran
Pengujian arah putaran motor dapat dilakukan dengan mendeteksi keadaan kaki PD2 dan PD3. Setiap kali interupsi di kaki PD2 (perubahan dari low
ke high). Kedua sinyal memiliki beda fasa 900
”Gambar (11)”
Berdasarkan gambar (”11”) dapat diamati bahwa untuk arah putaran berlawanan jarum jam (CCW), saat terjadi interupsi di kaki PD2 maka kaki PD3 selalu dalam keadaan low. Untuk arah searah jarum jam (CW) saat terjadi interupsi di kaki PD2 maka kaki PD3 selalu dalam keadaan high. Dengan demikian arah putaran motor setiap saat dapat diketahui
Jurnal Teknik Mesin Vol. 6, No.2,Desember 2009 ISSN 1829-8958
102
4.2.3 Penalaran Kontrol Kecepatan
Pengujian terhadap kontrol kecepatan untuk
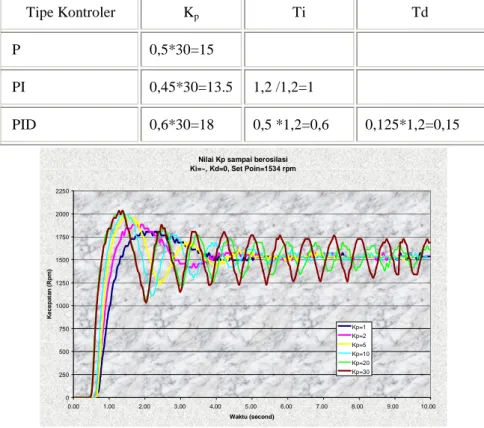
mendapatkan nilai ku dan Pu yaitu dengan menset Ki = ~ dan Kd=0. Nilai Kp ditambah bertahap sampai akhirnya berosilasi terus. Maka dari pengujian didapat grafik sebagai dibawah ini
Sistem berosilasi terus-menerus pada harga Kp=30 jadi didapat harga Ku=30. Nilai Pu adalah 1,2s sehingga didapat nilai kontrol untuk masing-masing tipe kontrol sebagai berikut:
Tabel 3 Hasil Pengujian dengan metoda osilasi
Tipe Kontroler Kp Ti Td
P 0,5*30=15
PI 0,45*30=13.5 1,2 /1,2=1
PID 0,6*30=18 0,5 *1,2=0,6 0,125*1,2=0,15
Nilai Kp sampai berosilasi Ki=~, Kd=0, Set Poin=1534 rpm
0 250 500 750 1000 1250 1500 1750 2000 2250 0.00 1.00 2.00 3.00 4.00 5.00 6.00 7.00 8.00 9.00 10.00 Waktu (second) K e c e p a ta n (R p m ) Kp=1 Kp=2 Kp=5 Kp=10 Kp=20 Kp=30
Gambar 12 Grafik penalaran Ziegler Nichols untuk Kontrol Kecepatan
Untuk Kontrol PID diset menjadi bilangan bulat ke atas sehingga nilai konstanta menjadi Kp=18, Ki=1 dan Kd=1. Implementasi kontrol PID menghasilkan grafik sebagai berikut:
Dari hasil pengujian PID didapat karakteristik kontrol kecepatan motor DC sebagai berikut:
Waktu naik (rise time), tr = 0,474 s
Waktu puncak (peak time), tp = 1,09s
Lewatan maksimum (overshoot), Mp = 12,5%
Waktu penetapan (settling time), ts = 3,18s
5. PENUTUP
Berdasarkan hasil imlementasi control kecepatan motor DC menggunakan logika PID maka ditarik kesimpulan sebagai berikut:
1. Penalaran menggunakan Ziegler-Nichols untuk
kontrol kecepatan menghasilkan tanggapan
yang baik terhadap mode PID
2. Nilai karakteristik control PID dengan
penalaran Ziegler-Nichols untuk control
kecepatan pada motor DC yang digunakan adalah sebagai berikut: rise time 0,474s, Peak time 1,09s, overshoot 12,5%, settling time 3,1s dan stedy state error 0,4%
PUSTAKA
1 Astrom, K.J. , & H.agglund, TPID controllers:
Theory, design and tuning (2nd ed). North
Carolina, USA: Instrument Society of America., 1995.
2 B, Tomas, Ziegler Nichols Method, Michigan
University, http://www.chem.mtu.edu
/~tbco/cm416/zn.html, 14 Juni 2007, 6.30 WIB. .2004.
3 Barr, Michael. Pulse Width Modulation, Embedded Systems Programming, 2001.
4 Durda, Frank. Serial and UART Tutorial,
tp://www.freebsd.org/doc
/en_US.ISO8859-1/articles/serial-uart/index.html, 11 juni 2007, 02.50 WIB. 2004.
5 Electus Distribution, Optocouplers: When and
how to use them,
http://www.electusdistribution.com.au/images_up loaded/optocoup.pdf. 2001.
6 Hartono, Puji. Tesis Analisis Pengendali Kecepatan Motor Dc Menggunakan Metoda Logika Fuzzy Dengan Pencatudayaan PWM. Teknik Elektro Institut Teknologi Padang. 2008. 7 Heryanto, Hari, Pemrograman Bahasa C Untuk
Mikrokontroler Atmega8535. Penerbit Andi
![Gambar 1 Diagram Blok Closed Loop [6]](https://thumb-ap.123doks.com/thumbv2/123dok/4542243.3298212/2.892.122.806.128.1150/gambar-diagram-blok-closed-loop.webp)
![Gambar 4 Kurva respons memperlihatkan 25 % lonjakan maksimum [8]](https://thumb-ap.123doks.com/thumbv2/123dok/4542243.3298212/3.892.113.789.124.382/gambar-kurva-respons-memperlihatkan-lonjakan-maksimum.webp)