PERANCANGAN SISTEM KONTROL
AQUARIUM OTOMATIS BERBASIS
MIKROKONTROLLER
Disusun guna Memenuhi
Tugas Mata Kuliah
”Mekatronika”
Disusun Oleh :
Akbar Teguh Triono
201310130311140
Axl Andhika Riski
201310130311139
Riski Kusuma Atmaja
201310130311135
Ach. Wawan Setyawan
201310130311137
Fajar Dwi Wijayanto
201310130311124
Andhika Abimanyu
201310130311128
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK
PENDAHULUAN
1.1 Latar Belakang
Akhir-akhir ini hobi memelihara ikan hias menjadi suatu trend di masyarakat, mulai dari kalangan bawah sampai kalangan atas. Akuarium yang ada sekarang ini masih dilakukan secara manual. Banyak orang yang hobi memelihara ikan kebingungan jika mereka bepergian jauh. Hal ini dimungkinkan karena tidak ada yang memelihara
ikannya dengan baik. Faktor penting pemeliharaan ikan pada akuarium adalah, kejenihan air, dan sirkulasi air yang baik pada akuarium.
Dari permasalahan tersebut, diperlukan rancangan cara kerja sistem otomatis yang dapat mengontrol, mengatur sistem sirkulasi air secara otomatis pada aquarium saat ditinggal pemiliknya. Pengontrolan sitem sirkulasi air secara otomatis pada aquarium akan lebih memudahkan bagi pecinta ikan hias untuk memelihara ikan peliharaannya. Tidak hanya mempermudah pemeliharaannya, dengan adanya sistem otomatis ini juga dapat meningkatkan mutu kualitas hidup ikan.
Dalam perkembangannya muncul permasalahan baru yaitu kekeruhan air dalam aquarium. Kekeruhan air dapat ditimbulkan oleh zat padat yang terlarut misalkan sisa makanan ikan dan kotoran ikan.Air yang keruh sulit didesinfeksi,karena mikroba
terlindung oleh zat terlarut tersebut.Air yang keruh akan menyebabkan intensitas cahaya yang masuk berkurang.Hal tersebut disebabkan cahaya yang melewati air keruh karena mengalami penyerapan atau pemantulan.sehingga hanya sedikit cahaya yang diteruskan. Apabila tetap dibiarkan maka dapat menghambat pertumbuhan ikan.Oleh karena itu, kami menambahkan sistem pengurasan dan pengisian air dalam aquarium menggunakan sensor LDR. LDR dapat dimanfaatkan sebagai pengukur perubahan tegangan yg
dihasilkan. Dengan demikian secara praktis pengukuran intensitas cahaya yang
menyebabkan perubahan tegangan yang dihasilkan oleh LDR ini dapat digunakan juga untuk mendeteksi tingkat kekeruhan air.Dengan adanya sistem ini orang yang hobi memelihara ikan tidak perlu khawatir lagi dengan ikan peliharaannya.Karena dalam akuarium dapat memberikan ,mengatur kerja motor air,mengatur sirkulasi air otomatis pada akuarium.
Berdasarkan latar belakang yang telah diuraikan sebelumnya, maka dapat ditentukan rumusan masalah yaitu :
1. Bagaimana cara mengatur sistem sirkulasi air aquarium secara otomatis?
2. Bagaimana cara merancang sistem untuk pengurasan dan pengisian berkala air secara otomatis pada aquarium berdasarkan tingkat kekeruhan air?
1.3 Tujuan
Berdasarkan rumusan masalah yang telah diuraikan sebelumnya, maka tujuan penelitian ini adalah sebeagai berikut :
1. Merancang dan membuat suatu sitem sirkulasi air secara otomatis pada akuarium. 2. Merancang dan membuat suatu sistem untuk menentukan tingkat kekeruhan air dan
penggantian berkala air secara otomatis pada akuarium.
TINJAUAN PUSTAKA
2.1 Mikrokontroller ATMega 8535
ATMega8535memiliki beberapa kemampuan:
1. Sistem mikrokontroler 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz.
2. Memiliki memori flash 8 KB, SRAM sebesar 512 byte dan EEPROM (Electrically
Erasable Programmable Read Only Memory) sebesar 512 byte.
3. Memiliki ADC (Pengubah analog-ke-digital) internal dengan ketelitian 10 bit
sebanyak 8 saluran.
4. Memiliki PWM (Pulse Width Modulation) internal sebanyak 4 saluran.
5. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps.
6. Enam pilihan mode sleep, untuk menghemat penggunaan daya listrik.
Mikrokontroler ATMega8535 memiliki 40 pin untuk model PDIP, dan 44 pin untuk model TQFP dan PLCC. Nama-nama pin pada mikrokontroler ini adalah
1. VCC untuk tegangan pencatu daya positif.
2. GND untuk tegangan pencatu daya negatif.
3. PortA (PA0 - PA7) sebagai port Input/Output dan memiliki kemampuan lain yaitu
sebagai input untuk ADC
4. PortB (PB0 – PB7) sebagai port Input/Output dan juga memiliki kemampuan yang
lain.
5. PortC (PC0 – PC7) sebagai port Input/Output untuk ATMega8535.
6. PortD (PD0 – PD7) sebagai port Input/Output dan juga memiliki kemampuan yang
lain.
7. RESET untuk melakukan reset program dalam mikrokontroler.
8. XTAL1 dan XTAL2 untuk input pembangkit sinyal clock.
9. AVCC untuk pin masukan tegangan pencatu daya untuk ADC.
10.AREF untuk pin tegangan referensi ADC.
2.2 Liquid Crystal Display (LCD)
pertama merupakan panel LCD sebagai media penampil informasi dalam bentuk huruf/angka dua baris, masing–masing baris bisa menampung 16 huruf/angka.
Gambar 2.4. LCD karakter 2x16
Bagian kedua merupakan sebuah sistem yang dibentuk dengan mikrokontroler yang ditempel dibalik pada panel LCD, berfungsi mengatur tampilan LCD. Dengan demikian pemakaian LCD M1632 menjadi sederhana, sistem lain cukup mengirimkan kode – kode ASCII dari informasi yang ditampilkan. Spesifikasi LCD M1632:
1. Tampilan 16 karakter 2 baris dengan matrik 5 x 7 + kursor. 2. ROM pembangkit karakter 192 jenis.
3. RAM pembangkit karakter 8 jenis ( deprogram pemakai ). 4. RAM data tampilan 80 x 8 bit ( 8 karakter ).
5. Duty ratio 1/16.
6. RAM data tampilan dan RAM pembangkit karakter dapat dibaca dari unit mikroprosesor.
7. Beberapa fungsi perintah antara lain adalah penghapusan tampilan (display clear), posisi kursor awal ( crusor home ), tampilan karakter kedip (display character blink), penggeseran kursor ( crusor shift ) dan penggeseran tampilan (display shift).
8. Rangkaian pembangkit detak.
9. Rangkaian otomatis reset saat daya dinyalakan. 10. Catu daya tunggal +5 volt. (Andi, N. Paulus, 2004).
2.2 Motor filter aquarium AC
Keuntungan dari jenis filter internal ini adalah kita tidak perlu khawatir air akuarium habis terkuras keluar karena filter yang bocor. Selain itu karena juga menggunakan saluran penghisap udara luar yang dimasukkan dalam akuarium akan menambah kadar oksigen tanpa harus menambahkan pompa udara.
2.4 SensorLDR (Light Dependent Resistor)
Resistor peka cahaya atau fotoresistor adalah komponen elektronik yang resistansinya akan menurun jika ada penambahan intensitas cahaya yang mengenainya. Fotoresistor dapat merujuk pula pada light dependent resistor (LDR) atau fotokonduktor (Supatmi, 2010).
Resistor peka cahaya (Light Dependent Resistor/ LDR) memanfaatkan bahan
BAB III
METODE PENDEKATAN
3.1 Perancangan Perangkat Keras
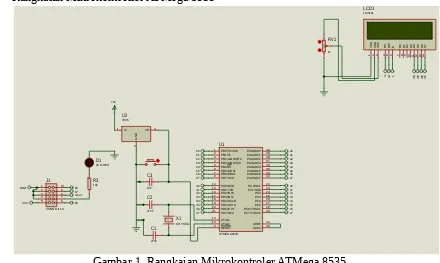
Rangkaian Mikrokontroller ATMega 8535PC6/TOSC1 28
Gambar 1. Rangkaian Mikrokontroler ATMega 8535
Rangkaian RelayGambar 2. Rangkaian Relay
Rangkaian ini berfungsi sebagai saklar otomatis dan juga sebagai hasil dari proses eksekusi mikrokontroler untuk menghidupkan dan mematikan pompa air. Rangkaian ini membutuhkan catu daya sebesar 5V DC agar relay dapat berfungsi dengan baik.
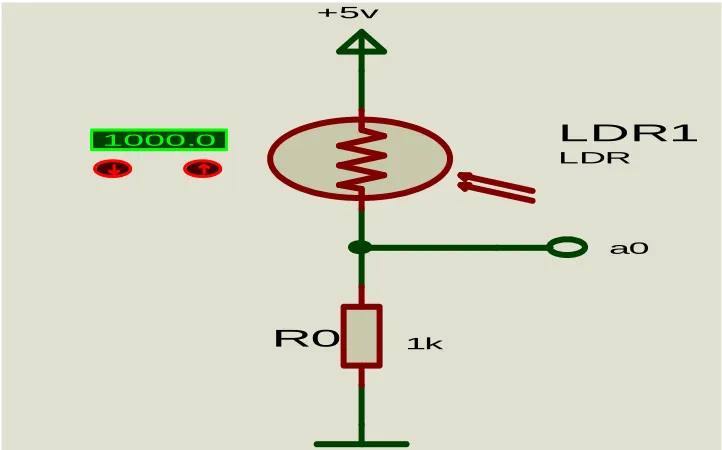
Gambar 3. Rangkaian Sensor LDR
Rangkaian Catu Daya
Perancangan alat pengganti air aquarium otomatis berbasis mikrokontroler ATmega8535 ini sangat tergantung pada tegangan yang diberikan oleh power supply. Jika tidak ada tegangan yang diberikan pada rangkain dispenser otomatis pendeteksi objek ini maka, keseluruhan rangkaian ini tidak dapat bekerja seperti yang diinginkan.
Power supply berfungsi untuk menurunkan tegangan AC (alternating current) ke tegangan DC (direct current). Maka diperlukan rangkain power supply yang terdiri dari beberapa komponen elektronika diantaranya:
1. Trafo
2. Dioda 3. Kondensator
Rangkaian regulator di tunjukan pada Gambar 4.
Gambar 4. Skematik Adaptor
1000.0 LDR1
LDR
R0 1k
+5v
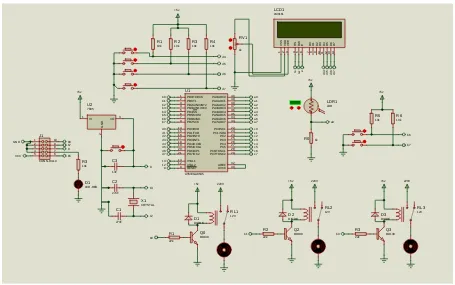
Rangkaian Alat pengganti Air Aquarium Otomatis Berbasis Mikrokontroler ATmega 8535
Gambar 5. Rangkaian Alat Pengganti Air Aquarium Otomatis Berbasis Mikrokontroler ATmega8535
3.2 Perancangan Perangkat Lunak
PC6/TOSC1PC5 2827 PC4 26
nilai masukkan dari keypad tingkat kekeruhan (x) Nilai LDR (y)
Ketetapan Pengurasan (z)
Nilai kejernihan max dari air (Q) F1 : filter penguras
F2 : filter penguras F3 : filter pengisi
BAB IV
START
Masukan Nilai x Nilai y Nilai z Nilai Q
x = y
FI = ON F1 = OFF
F2 = ON
y = Q
END
y = z
Bandul =
F2 = OFF F3 = ON
Limit swith = 0
F3 = OFF F2 = 0
T
Y
T Y
Y T T
Y
HASIL DAN PEMBAHASAN
4.1 Pengujian Keseluruhan Sistem Alat
Gambar alat keseluruhan dapat dilihat pada Gambar 8.
Gambar 8. Tampilan Alat Keseluruhan
Untuk melakukan pengujian rangkaian alat keseluruhan maka mempunyai prosedur atau langkah dalam mengoperasikannya. Pertama sekali hubungkan rangkaian alat ke sumber tegangan listrik PLN melalui kabel power yang disediakan, kemudian tekan tombol push on untuk menghidupkan rangkaian alat tersebut.
Berikut adalah gambar pada saat perangkat dihidupkan, ditunjukan pada Gambar 9.
Setelah ditekan tombol untuk pengaturan menu maka akan tampil gambar seperti berikutUntuk melakukan pensettingan dilakukan penekanan tombol up atau down untuk mendapatkan nilai tingkat kecerahan sesuai yang diinginkan lalu ditekan tombol ok. sehingga tampilan lcd sebagai berikut.
Tingkat kecerahan ini merupakan tingkat kejernihan aquarium untuk melakukan pemfilteran yang dilakukan oleh motor filter1 guna mendapatkan tingkat kecerahan 100% kembali. Kita membagi tingkat kecerahan dalam 3 bagian yaitu 70%, 80% dan 90% sehingga jika nilai adc yang terdeteksi oleh LDR menunjukkan nilai dibawah nilai adc untuk tingkat kecerahan 70% (saat 60%) maka otomatis motor filter 2 akan membuang air sampai bandul aktif menggerakkan switch sebagai indikator aquarium telah kosong. Setelah bandul melakukan switching maka motor filter 2 akan menyala dan motor lainnya mati atau off yang berfungsi untuk mengisi air kembali ke aquarium sampai indikator aquarium terisi penuh dan motor filter 2 mati
Berikut adalah percobaan penetapan nilai adc untuk mendapatkan nilai tingkat kecerahan
Saat tingkat kecerahan 70 %
Saat tingkat kecerahan 80%
Gambar 12 nilai adc saat tingkat kecerahan 80%
Saat tingkat kecerahan 90%
Gambar 12 nilai adc saat tingkat kecerahan 90%
Saat tingkat kecerahan 100%
BAB V
KESIMPULAN DAN SARAN
Berdasarkan hasil perencanaan, pembuatan sistem dan pengujian hasil maka di dapat beberapa kesimpulan yang merupakan hasil dari keseluruhan proses pengerjaan proyek akhir ini. Penulis juga memberikan beberapa saran guna kebaikan dari sistem ini kedepannya.
5.1 Kesimpulan
Dari hasil alat pengganti air aquarium otomatis berbasis mikrokontroler ATMEGA8535 ini, kami dapat menarik beberapa kesimpulan antara lain :
1. Alat pengganti air aquarium otomatis berbasis mikrokontroler ATMEGA8535 ini telah dapat memenuhi fungsinya untuk melakukan penggantian air dan pemfilteran secara otomatis berdasarkan tingkat kekeruhan air yang dibaca oleh sensor LDR dengan baik. 2. Perangkat dapat berjalan secara otomatis, sehingga mengurangi tingkat kerepotan
dalam hal mengganti air secara manual yang sangat menyita waktu.
5.2 Saran
Pada pengerjaan Proyek akhir ini tidak lepas dari berbagai macam kelemahan didalamnya, baik itu pada perencanaan sistem maupun pada peralatan yang telah dibuat. Untuk memperbaiki kekurangan-kekurangan serta sebagai masukan untuk perbaikan sistem menjadi lebih sempurna kedepannya, maka diberikan beberapa saran dan harapan sebagai berikut:
Perlu adanya pengembangan pada sensor kejernihan air ini, yaitu dengan
menambahkan pengaturan set point menggunakan metode control PID sehingga pengaturan set poin disini dapat dilakukan dari kejauhan.
DAFTAR PUSTAKA
[1]. Sahli, Irwan.et al. Perancangan RS 232 to RS 485 Converter Sistem Network Multidrop.
[2]. 2010 Atmel Corporation. All rights reserved.
[3]. Arif, Ridla Rizalani. Rancang Bangun Prototipe Node Jaringan Sensor Nirkabel Dengan Media Komunikasi Infra Merah Untuk Akuisisi Data Pada Sistem Informasi Parkir Lantai Banyak, Tugas akhir: T. Elektronika PENS-ITS:2009.
[4]. Alldatasheet,Website www.datasheetcatalog.com/datasheets_pdf/.../LM35
[5]. Alldatasheet,Website www.datasheetcatalog.com/...pdf/T/S/O/P/TSOP4838.shtml [6]. Alldatasheet,Website www.datasheetcatalog.com/datasheet.../TSAL6200
[7]. Fathani, Hazmi. Rancang bangun alat pengering gabah tipe silinder vertical
[8]. Hermawan, Yuni. Sistem Pengering Gabah Dengan Efek Tarikan Cerobong Berbahan Bakar Limbah Sekam
[9]. Araki Mituhiko. Control Systems, Robotics, And Automation – Vol. Ii - Pid Control
[10].Purwanto, Era. Pengembangan Metoda Self Tuning Parameter Pid Controllerdengan Menggunakan Genetic Algorithm Pada Pengaturanmotor Induksi Sebagai Penggerak Mobil Listrik, Seminar Nasional Aplikasi Teknologi Informasi 2009 (SNATI
2009):2009
[11].Akhirta,Silvi Agustri. Perencanaan Dan Penerapan Algoritma Komunikasi Jaringan Sensor Nirkabel Dengan Media Komunikasi Infra Merah Pada Sistem Informasi Parkir Lantai Banyak. Tugas akhir: T. Elektronika PENS-ITS:2009.