Fakultas Ilmu Komputer
Universitas Brawijaya
10418
Penentuan Model Lajur pada Self-Driving Car menggunakan Hough Transform dan Kuantisasi Warna K-Means
Pupung Adi Prasetyo1, Randy Cahya Wihandika2, Candra Dewi3
Program Studi Teknik Informatika, Fakultas Ilmu Komputer, Universitas Brawijaya Email: 1[email protected], 2[email protected], 2[email protected]
Abstrak
Teknologi terus berkembang hingga ke tahap yang memungkinkan kegiatan sehari-hari manusia dapat dilakukan oleh kecerdasan buatan. Penelitian pada kecerdasan buatan terus berkompetisi untuk menghasilkan penemuan-penemuan yang dapat meringankan beban kerja masyarakat. Saat ini, piranti kecerdasan buatan sudah dapat ditemui di berbagai lingkungan, salah satunya adalah self-driving car.
Topik ini cukup diminati oleh para peneliti saat ini karena pembagian fungsionalitasnya yang cukup beragam. Fungsionalitas yang paling sering diperbincangkan yakni dalam perencanaan model lajur navigasi pada self-driving car. Model lajur yang merupakan arah navigasi dari self-driving car seharusnya dapat ditentukan secara visual berdasarkan markah jalan, yang juga merupakan arah navigasi dari kendaraan publik. Oleh karenanya, penelitian ini akan mencoba menentukan model lajur secara visual menggunakan metode pengolahan citra. Dengan hanya menggunakan pengolahan citra, tingkat presisi yang dihasilkan dapat mencapai nilai rata-rata 88,45% pada berbagai kondisi jalan.
Oleh karenanya, disimpulkan bahwa pengolahan citra dapat digunakan untuk menentukan model lajur pada self-driving car.
Kata kunci: model lajur, Hough transform, kuantisasi warna, deteksi tepi Abstract
Technology continues to develop to the phase where human daily activities can be carried out by artificial intelligence. Research on artificial intelligence keeps on competing to produce more advanced program to simplify things. Nowadays artifial intelligence tools can be found in various application, one of them is self-driving car. This topic is one of the most widely researched topic due to its various division of functionality. The most frequently discussed functionality is the defining of navigation lane model. The lane model which is the navigation direction of a self-driving car must be visually determined based on the road markings, which also the navigation direction directions of public vehicles. Therefore, this study will determine the lane model visually using image processing methods. By only using image processing, the resulting precision can reach an average value of 88.45% in various road conditions. Therefore, it can be concluded that the visual image processing can be used to determine the lane model in a self-driving car.
Keywords: lane model, Hough transform, color quantization, edge detection
1. PENDAHULUAN
Mengemudi merupakan salah satu kegiatan sehari-hari yang dilakukan oleh kebanyakan orang untuk mencapai ke tempat tujuan yang cukup jauh dan tidak efisien bila ditempuh dengan berjalan kaki. Untuk dapat mengemudikan kendaraan, memerlukan pembelajaran hingga cukup mahir sebelum dapat mengemudikannya secara benar. Selain itu, mengemudi juga memerlukan konsentrasi
dan stamina yang cukup untuk mendapatkan keselamatan selama perjalanan. Oleh karenanya, dikembangkan teknologi untuk mengemudikan mobil secara otomatis dengan aman, yaitu self-driving car.
Self-driving car merupakan kendaraan yang dapat bergerak dan mengenali daerah sekitarnya tanpa kendali manusia. Kendaraan ini menggunakan berbagai sensor seperti radar, light detection and ranging (LIDAR), global positioning system (GPS), dan odometry untuk
mendeteksi objek-objek di sekitarnya. Sensor tersebut menghasilkan informasi sensorik yang akan diinterpreasi oleh sistem kontrol self- driving car untuk mengidentifikasi model lajur navigasi, objek hambatan, maupun rambu lalu lintas (Dokic, Müller, & Meyer, 2015).
Tujuan utama dari penelitian self-driving car adalah untuk menyelesaikan permasalahan- permasalahan fungsionalitas pada self-driving car seperti perencanaan model lajur navigasi navigasi, deteksi objek hambatan sekitar, dan deteksi rambu maupun lampu lalu lintas. Di antara permasalahan tersebut, perencanaan model lajur navigasi merupakan yang paling sering dibicarakan karena model lajur navigasi merupakan kebutuhan utama agar self-driving car dapat dijalankan ke arah yang tepat. Dalam penerapan self-driving car di bidang pengolahan citra, model lajur dapat ditentukan berdasarkan markah jalan yang akan dilalui kendaraan tersebut, seperti yang dilakukan pada penelitian Aziz, Prihatmanto, dan Hindersah (2017), serta penelitian Zhang, Chen, dan Zhan (2018). Oleh karenanya, pendeteksian garis markah jalan merupakan solusi termudah dalam menyelesaikan fungsionalitas perencanaan model lajur.
Menurut Rahmdel, et al. (2015), algoritme Hough transform merupakan algoritme pendeteksian dengan akurasi yang sangat baik.
Dalam beberapa penelitian yang membahas tentang fungsionalitas ini pun, algoritme ini merupakan yang paling sering digunakan. Hal tersebut dikarenakan faktor keefektifan prosesnya jika dibandingkan agoritme lain (Kaur & Chhabra, 2015). Meskipun algoritme Hough transform cukup efektif, tetapi hasil yang diperoleh tidak terlalu baik pada jalan dengan tingkat kecerahan yang dominan dan juga proses komputasinya cukup membebani untuk dijalankan secara real-time. Untuk dapat mengurangi noise yang dihasilkan oleh tingkat kecerahan dominan, Liu, et al. (2019) melakukan proses kuantisasi warna menggunakan k-means clustering. Karena pada dasarnya self-driving car dijalankan secara real- time, maka pada penelitian Wen dan Jo (2017) dilakukan ekstraksi untuk membatasi area komputasi Hough transform hanya pada wilayah kepentingan (region of interest). Oleh karenanya, penelitian ini akan mencoba
kekurangan tersebut.
2. LANDASAN KEPUSTAKAAN 2.1. Hough Transfrom
Hough transform merupakan teknik ekstraksi fitur yang digunakan untuk menemukan contoh objek yang tidak sempurna dalam bentuk tertentu, seperti garis, lingkaran, dan oval dengan melakukan prosedur voting suara eksplisit (Shapiro & Stockman, 2001).
Prosedur voting dilakukan dalam ruang parameter, yang mana kandidat objek diperoleh sebagai nilai maximal dalam suatu ruang akumulator yang secara eksplisit dibangun oleh algoritme untuk menghitung Hough transform.
Untuk membentuk garis lurus, secara dapat digunakan persamaan y = mx + b. Tetapi menurut Duda dan Hart (1972), parmeter kemiringan m dapat menghasilkan nilai tak terbatas sehingga diusulkan penggunaan bentuk normal Hesse seperti pada Persamaan (1).
𝜌 = 𝑥𝑐𝑜𝑠𝜃 + 𝑦𝑠𝑖𝑛𝜃
(1) keterangan:- ρ merupakan jarak dari titik asal ke titik terdekat pada garis lurus
- θ merupakan sudut antara sumbu x dan garis yang menghubungkan ρ
Penggambaran dari persamaan ini ditampilkan pada Gambar 1.
Gambar 1. Penggambaran bentuk normal Hesse pada Hough transform
2.2. Deteksi Tepi
Deteksi tepi merupakan fungsi mendasar dalam pengolahan citra, khususnya di bidang deteksi area fitur dan ekstraksi fitur (Umbaugh, 2010). Deteksi digunakan digunakan untuk
Sobel, Canny, Prewitt, dan Roberts.
Pada penelitian ini, algoritme yang digunakan untuk menentukan citra tepi yang merupakan input dari Hough transform adalah deteksi tepi Canny. Algoritme ini digunakan karena memiliki hasil yang lebih efektif dalam menentukan model lajur seperti yang dilakukan pada penelitian Yan dan Li (2017). Algoritme deteksi tepi Canny perlu menjalankan proses- proses bertahap mulai dari filter Gaussian, menentukan gradien intenstas, non-maximum suppression, hingga hysteresis thresholding.
2.2.1. Filter Gaussian
Filter Gaussian digunakan untuk menghilangkan noise ketika menjalankan algoritme deteksi tepi dengan mengubah citra input menjadi citra blur. Citra blur diperoleh dengan melakukan konvolusi kernel Gaussian yang ditentukan menggunakan Persamaan (2) ke dalam citra input.
𝐺
(𝑥,𝑦)=
12𝜋𝜎2
𝑒
−𝑥2+𝑦22𝜎2 (2) 2.2.2. Gradien IntensitasGradien intensitas merupakan nilai gradien dan arah gradien pada suatu citra. Dalam menentukan gradien intensitas dapat menggunakan filter deteksi tepi lain, yang mana dalam penelitan ini menggunakan filter Sobel karena digunakan juga pada penelitian Yan dan Li (2017). Nilai dan arah gradien pada citra ditentukan menggunakan Persamaan (3), yang mana perlu ditentukan nilai gradien turunan terlebih dahulu pada sumbu horizontal dan vertikal menggunakan Persamaan (4).
|𝐺| = √𝐺
𝑥2+ 𝐺
𝑦2∠𝐺 = 𝑎𝑟𝑐𝑡𝑎𝑛(𝐺
𝑦⁄ 𝐺
𝑥)
(3)
𝐺
𝑥= [
−1 0 1
−2 0 2
−1 0 1
] ∗ 𝐼, 𝐺
𝑦=
[
−1 −2 −1
0 0 0
1 2 1
] ∗ 𝐼
(4)2.2.3. Non-Maximum Suppression
Non-maximum suppression (NMS) digunakan untuk menipiskan tepi-tepi tebal yang dihasilkan oleh nilai gradien. NMS bekerja dengan menemukan piksel yang memiliki nilai maksimum pada tepi berdasarkan tepi yang terhubung pada sudut dari arah gradien.
2.2.4. Hysteresis Thresholding
Hysteresis thresholding digunakan untuk menentukan tepi sebenarnya. Proses ini menggunakan dua tipe threshold, yaitu threshold tinggi dan rendah yang ditentukan menggunakan Persamaan (5). Piksel yang bernilai lebih besar dari tepi tinggi ditetapkan sebagai tepi kuat, sedangkan piksel yang bernilai di antara piksel tinggi dan rendah ditetapkan sebagai tepi rendah. Tepi sebenarnya merupakan tepi kuat dan juga tepi lemah yang bertetangga dengan tepi kuat.
ℎ𝑖𝑔ℎ = 𝑚𝑎𝑥(𝑖𝑚𝑔) ∗ ℎ𝑖𝑔ℎ𝑅𝑎𝑡𝑖𝑜 𝑙𝑜𝑤𝑇ℎ𝑟𝑒𝑠ℎ𝑜𝑙𝑑 = ℎ𝑖𝑔ℎ ∗ 𝑙𝑜𝑤𝑅𝑎𝑡𝑖𝑜
(5) 2.3. Kuantisasi Warna K-MeansKuantisasi warna k-means merupakan algoritme kuantisasi warna berdasarkan k- means clustering. Algoritme ini bertugas untuk mengurangi jumlah warna yang digunakan dari suatu citra ke k jumlah warna. Mulanya, dijalankan proses k-means clustering untuk mengelompokkan setiap piksel ke dalam suatu klaster dengan nilai rata-rata terdekat. Setiap klaster diwakili oleh sebuah titik centroid.
Kemudian nilai piksel citra diatur ulang dengan nilai centroid dari klaster pada setiap piksel.
Dalam penelitian ini, kuantisasi warna digunakan untuk menyamarkan warna bayangan untuk menghapus noise bayangan tersebut. Hasil dari proses kuantisasi warna ditampilkan pada Gambar 2.
Gambar 2. Kuantisasi warna (16 jumlah warna)
2.4. Region of Interest
Region of Interest (ROI) merupakan sampel dari kumpulan data yang diidentifikasi untuk tujuan tertentu (Brinkmann, 1999).
Dalam visi komputer dan optical character recognition (OCR), ROI digunakan untuk menentukan batas-batas objek yang sedang diamati. Contoh citra hasil ekstraksi ROI ditampilkan pada Gambar 3.
Gambar 3. Ekstraksi ROI
3. PERANCANGAN
3.1. Perancangan Algoritme Kuantisasi Warna K-Means
Dalam proses ini, sebelum dijalankan perlu ditentukan nilai k yang merupakan jumlah klaster warna. Proses dimulai dengan menentukan nilai centroid dengan jumlah yang sama dengan nilai k secara acak. Kemudian setiap piksel pada input citra dikelompokkan berdasarkan jarak terdekat piksel dengan centroid. Proses tersebut dijalankan terus hingga nilai centroid tidak berubah. Setelah itu, piksel citra diatur berdasarkan nilai centroid dari klaster pada setiap piksel. Terakhir, nilai piksel rendah diatur menjadi nilai yang sama dengan klaster piksel aspal untuk menyamarkan noise bayangan. Alur proses algoritme ini ditampilkan pada Gambar 4.
Gambar 4. Diagram alir proses kuantisasi warna 3.2. Perancangan Algoritme Deteksi Tepi
Gaussian ke dalam citra sehingga menghasilkan citra blur. Proses dilanjutkan dengan menentukan gradien intensitas dari setiap piksel citra blur. Karena proses menentukan gradien menghasilkan tepi yang tebal, maka dijalankan proses non-maximum suppression untuk menipiskan tepi-tepi tersebut. Tepi ditipiskan dengan menemukan piksel yang memiliki nilai maksimum pada tepi berdasarkan tepi yang terhubung pada sudut dari arah gradien. Proses terakhir adalah dengan melakukan hysteresis thresholding. Piksel citra dibagi ke dalam threshold tinggi dan threshold rendah. Piksel dengan nilai gradien yang lebih besar dari threshold tinggi ditetapkan sebagai tepi kuat, sedangkan piksel dengan nilai gradien yang berada di antara threshold tinggi dan threshold rendah. Tepi kuat dan tepi lemah yang bertetangga dengan tepi kuat ditetapkan sebagai tepi sebenarnya. Alur proses deteksi tepi Canny ditampilkan pada Gambar 5.
Gambar 5. Alur proses algoritme deteksi tepi Canny
3.3. Perancangan Algoritme ROI
Region of interest dibentuk dengan
menentukan suatu area dari poin-poin (mask)
yang ditentukan secara manual. Poin-poin di dalam area tersebut kemudian diisi dengan piksel dari citra sehingga membentuk citra mask. Alur proses ekstraksi ROI ditampilkan pada Gambar 6.
Gambar 6. Alur proses algoritme ekstraksi ROI 3.4. Perancangan Algoritme Hough Transform
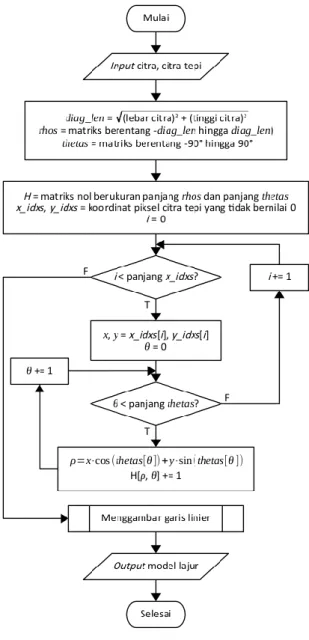
Proses dimulai dengan menginisialisasi nilai kisaran rentang dari ρ dan θ (rhos dan thetas) pada citra. Nilai rhos ditentukan berdasarkan panjang diagonal dari citra (diag_len) yang berkisar antara -diag_len hingga diag_len, sedangkan thetas bernilai antara sudut -90° hingga 90°. Selanjutnya nilai ρ dapat ditentukan dengan memutar setiap piksel tepi ke seluruh sudut thetas untuk menentukan setiap kandidat garis. Nilai akumulator kemudian ditambahkan 1 (vote) untuk setiap ρ dan θ pada setiap kandidat garis.
Proses dilanjutkan dengan menggambar garis linier menggunakan kandidat garis yang memiliki akumulator tertinggi sehingga menghasilkan output garis model lajur dominan pada citra. Alur proses Hough transform ditampilkan pada Gambar 7.
Gambar 7. Alur proses algoritme Hough transform
4. Pengujian dan Analisis
4.1. Pengujian dan Analisis Hasil Model Lajur
Dalam pengujian ini, proses kuantisasi warna tidak dijalankan ke dalam sistem. Proses pengujian ini dilakukan dengan membandingkan piksel output model lajur dengan piksel citra pengujian yang model lajurnya telah ditentukan secara manual. Piksel output yang dibandingkan adalah piksel sampel yang diambil berdasarkan tinggi citra berbeda, yang mana pada penelitian ini diambil masing- masing 10 piksel sampel pada sisi markah kiri dan kanan. Model lajur dikatakan berhasil
Gambar 8. Hasil model lajur yang berhasil terdeteksi dengan benar
Sedangkan model lajur dikatakan tidak berhasil terdeteksi dengan benar bila terdapat kurang dari 6 piksel pada masing-masing sisi yang terdeteksi dengan tepat, yang ditampilkan contohnya seperti pada Gambar 9.
Gambar 9. Hasil model lajur yang tidak terdeteksi dengan benar
Setelah melakukan pengujian untuk mendeteksi model lajur yang tepat pada seluruh data, tingkat presisi dapat ditentukan dengan membandingkan jumlah frame yang berhasil terdeteksi dengan benar, dengan jumlah frame yang ada pada seluruh data citra. Hasil pengujian untuk tingkat presisi model lajur pada setiap data ditampilkan pada Tabel 1.
Tabel 1. Hasil tingkat presisi model lajur menggunakan Hough transform Data
ke-
Jumlah Frame
Jumlah Frame Terdeteksi
Tingkat Presisi (%)
1 297 286 96,30%
2 430 348 80,93%
3 265 221 83,40%
4 202 180 89,11%
5 561 527 93,94%
Keterangan kondisi jalan:
- Data ke-1 = Jalanan lurus dan terdapat markah jenis lain
- Data ke-2 = Terdapat jalan menikung, banyak bayangan dan cahaya berlebihan pada jalan - Data ke-3 = Terdapat jalanan menikung dan
banyak bayangan pada jalan
Berdasarkan hasil pada Tabel 1, dapat dilihat bahwa kondisi jalan memiliki pengaruh dalam menentukan tingkat presisi model lajur.
Model lajur pada citra dengan jalanan lurus cenderung memiliki tingkat presisi yang lebih tinggi. Hal itu terbukti pada Data ke-1 dan Data ke-5 yang menghasilkan tingkat presisi di atas 90%. Sedangkan tingkat kecerahan memiliki pengaruh paling buruk dalam menentukan tingkat presisi seperti dapat dilihat pada Data ke-2 dan ke-3 yang hanya menghasilkan tingkat presisi sekitar 80%. Ketika dianalisis, hal tersebut terjadi karena tingkat kecerahan dapat menyamarkan warna lajur dan lingkungan di sekitarnya sehingga menghasilkan noise seperti yang ditampilkan Gambar 10. Keberadaan jenis markah lain juga mempengaruhi tingkat presisi dari model lajur seperti dapat dilihat pada hasil Data ke-4, yang mana mendapatkan tingkat presisi di bawah 90%. Berdasarkan analisis, jenis markah lain ternyata dapat mengecoh proses Hough transform karena jenis markah lain, yang mana berbentuk garis juga mendapatkan suara pada prosedur voting.
Gambar 10. Hasil deteksi tepi pada citra dengan tingkat kecerahan tinggi
4.2. Pengujian dan Analisis Pengaruh Kuantisasi Warna
Proses pengujian ini hanya membandingkan seberapa besar pengaruh proses kuantisasi warna dalam menentukan model lajur. Pengujian dilakukan hanya dengan membandingkan tingkat presisi dari masing- masing output model lajur yang menjalankan proses kuantisasi warna dan yang tidak. Cara untuk menentukan tingkat presisinya serupa dengan yang digunakan untuk menguji hasil model lajur sebelumnya. Hasil pengujian untuk tingkat presisi model lajur yang ditambahkan metode kuantisasi warna ditampilkan pada Tabel 2.
Tabel 1. Hasil tingkat presisi model lajur
menggunakan Hough transform Keterangan kondisi jalan:
- Data ke-1 = Jalanan lurus dan terdapat markah jenis lain
- Data ke-2 = Terdapat jalan menikung, banyak bayangan dan cahaya berlebihan pada jalan - Data ke-3 = Terdapat jalanan menikung dan banyak bayangan pada jalan
- Data ke-4 = Terdapat jalanan menikung dan berbagai jenis markah lain
- Data ke-5 = Sepanjang jalan lurus dan terdapat markah jenis lain
Berdasarkan Tabel 2, dapat dilihat bahwa tingkat presisi dari model lajur pada hampir setiap data yang ditambahkan kuantisasi warna dengan nilai k=5 dan k=7 lebih tinggi daripada yang tidak ditambahkan proses kuantisasi warna. Itu artinya, pada data-data tersebut noise yang dihasilkan terutama oleh bayangan dapat diminimalisir. Namun, hal tersebut tidak berlaku pada Data ke-2, yang mana memiliki tingkat kecerahan tidak menentu (terdapat cahaya berlebihan sekaligus bayangan) pada jalan. Setelah dianalisis, ternyata proses kuantisasi warna tidak dapat menentukan klaster yang tepat karena intensitas warna yang dihasilkan terlalu dominan pada tingkat kecerahan yang tinggi ataupun rendah, yang mana membuat nilai centroid klaster pertengahan terlalu mendekati nilai centroid dari klaster tinggi ataupun rendah sehingga tidak dapat membedakan piksel-piksel tepi. Hal tersebut menyebabkan tepi yang seharusnya menjadi input dari Hough transfrom tidak dapat terdeteksi sehingga model lajur tidak dapat ditentukan secara benar, nilai k yang paling optimal berada pada nilai 7 sedangkan paling buruk berada pada nilai 3. Bahkan pada nilai k=3, tingkat presisi yang diperoleh tidak dapat dikatakan lebih baik dari proses yang tidak ditambahkan metode kuantisasi warna.
Perbedaan hasil yang signifikan terdapat pada Data ke-3, yang merupakan citra dengan kondisi jalanan terdapat bayangan. Setelah dianalisis, hal tersebut dikarenakan keterbatasan dari jumlah pemakaian warna sehingga piksel- piksel yang merupakan tepi, turut disamarkan ke dalam klaster pertengahan seperti yang ditampilkan pada Gambar 11. Itu artinya, semakin rendah nilai k yang digunakan maka menghasilkan tingkat presisi yang lebih rendah.
Gambar 11. Hasil citra yang telah dikuantisasi menggunakan beberapa nilai k
5. KESIMPULAN
Berdasarkan pengujian, algoritme Hough transform dapat menghasilkan model lajur dengan tingkat presisi rata-rata yang cukup baik pada setiap kondisi jalan yakni 88.45%.
Terutama ketika berjalan pada jalanan lurus tanpa objek hambatan menghasilkan tingkat presisi di atas 95%. Faktor kondisi jalan yang mempengaruhi tingkat presisi dalam penentuan model lajur di antaranya, yaitu bentuk jalanan lurus atau menikung, tingkat kecerahan pada citra, dan keberadaan jenis markah lain.
Penambahan metode penunjang dalam upaya meningkatkan tingkat presisi dalam penelitian ini, yakni kuantisasi warna terbukti cukup berhasil diterapkan pada beberapa kondisi jalan. Namun, metode tersebut tidak cocok digunakan pada kondisi jalan dengan tingkat kecerahan yang tidak menentu (terdapat cahaya berlebihan sekaligus bayangan) pada jalan, yang mana hanya menghasilkan tingkat presisi dari model lajur sekitar 70%.
6. DAFTAR PUSTAKA
Aziz, M.V.G., Prihatmanto, A.S., & Hindersah, H. (2017). Implementation of lane detection algorithm for self-driving car
Kaur, G., & Chhabra, A. (2015). Curved Lane Detection Transform and CLAHE using Improved Hough in a Multi-Channel ROI. International Journal of Computer Applications.
Wen, L., et al. Efficient and Robust Drivable Region Extraction for Autonomous Vehicles. 17th International Conference on Control, Automation and Systems (ICCAS2017).
Liu, D., et al. (2019). Application of Color Filter Adjustment and K-Means Clustering Method in Lane Detection for Self-Driving Cars. 2019 Third IEEE International Conference on Robotic Computing (IRC).
Liu, J., et al. (2018). Lane Detection Based on Straight Line Model and K-Means Clustering. IEEE 7th Data Driven Control and Learning Systems Conference.
Jensen, J. (2007). Hough Transform for Straight Lines. Mini-project in Image Processing, 7th semester 2007.
Yan, X., & Li, Y. (2017). A method of lane edge detection based on Canny algorithm. 2017 Chinese Automation Congress (CAC).
Dokic, J., Müller, B., & Meyer, G. (2015).
European Roadmap Smart Systems for Automated Driving. European Technology Platform on Smart Systems Integration (EpoSS).
Zhang, X., Chen, M., & Zhan, X. (2018). A combined approach to single-camera- based lane detection in driverless navigation. IEEE/ION Position, Location and Navigation Symposium (PLANS).
Rahmdel, P.S., et al. (2015). A Review of Hough Transform and Line Segment Detection Approaches. International Conference on Computer Vision Theory and Applications (VISAPP).
Malmir, S., & Shalchian, M. (2019). Design and FPGA implementation of dual- stage lane detection, based on Hough transform and localized features.
Miller, J. (2014). Self-Driving Car Technology's Benefits, Potential Risks, and Solutions. The Energy Collective
Group. Tersedia di:
<https://www.energycentral.com/c/ec/s elf-driving-car-technologys-benefits- potential-risks-and-solutions> [Diakses 11 Januari 2019).
Duda, R.O., & Hart, P.E. (1972). Use of the Hough Transformation to Detect Lines and Curves in Pictures.
Communications of the ACM.
Umbaugh, S.E. (2010). Digital Image Processing and Analysis: Human and Computer Applications with CVIPtools.
(2nd ed.). Boca Raton, FL: CRC Press.