BAB III
PERENCANAAN DAN PELAKSANAAN SURVEI
3.1. Perencanaan Survei Lokasi
Perencanaan adalah suatu proses untuk menentukan tindakan yang tepat di masa yang akan datang melalui serangkaian pilihan-pilihan. Serangkaian pilihan-pilihan yang dimaksud disini adalah penetapan tujuan, pemilihan metode, pemilihan instrumen, serta arah tindakan berdasarkan tujuan yang telah ditetapkan serta disesuaikan dengan biaya yang akan dikeluarkan..
Dalam proses perencanaan yang pertama harus diperhatikan adalah faktor-faktor yang berpengaruh pada pelaksanaan survei, faktor pengaruh tersebut antara lain :
Faktor pengaruh lapangan; yaitu keadaan variasi medan dan liputan daerah yang akan disurvei akan mempengaruhi pemilihan metode survei yang digunakan, keadaan sarana dan prasarana umum akan berpangaruh pada mobilisasi-demobilisasi, akomodasi, serta kegiatan operasional kerja.
Faktor kondisi instansi pelaksana; yaitu keadaan cadangan keuangan perusahaan, kondisi peralatan siap pakai/jadwal pemakaian peralatan, kondisi personil (jumlah dan keakhlian).
State of the art; yaitu instrumen dan metode yang umum digunakan saat ini. Kondisi alam di wilayah laut berbeda dengan di wilayah darat, dinamika air laut memberi kontribusi kendala pada pelaksanaan survei yang mengharuskan pelaksanaan survei di laut sedikit berbeda dengan survei di darat. Survei di laut memerlukan peralatan dan teknik pengukuran yang lebih rumit tetapi harus tetap menghasilkan data yang memenuhi standar ketelitian yang dibutuhkan.
Dengan keadaan tersebut, sebelum pelaksanaan survei lokasi untuk peletakan anjungan eksplorasi minyak lepas pantai diperlukan persiapan dan perencanaan yang matang supaya pada pelaksanaan survei di lapangan berjalan dengan lancar dan menghasilkan data yang baik. Tahap perencanaan survei lokasi terdiri atas 3 kegiatan yaitu :
a. Persiapan Administrasi
Persiapan administrasi ditujukan untuk memperlancar jalannya pelaksanaan survei di lapangan, persiapan administrasi meliputi :
Menyiapkan surat tugas dari instansi/perusahaan pemberi pekerjaan.
Menyiapkan surat izin (security clearance) dari instansi pemerintah yang berwenang.
Koordinasi dengan pihak-pihak yang terkait dengan pekerjaan survei. Menyusun tim survei.
Menyusun jadwal mobilisasi-demobilisasi tim serta jadwal kegiatan survei di lapangan.
b. Perencanaan Teknis
Perencanaan teknis dimaksudkan untuk menyesuaikan metode serta instrumen yang akan digunakan dengan kondisi lapangan serta memberi gambaran tentang pelaksanaan survei di lapangan supaya dapat menjamin bahwa pelaksanaan survei berlangsung secara efektif dan efisien. Perencanaan teknis meliputi kegiatan :
Mempersiapkan dan menyusun personil serta peralatan; yaitu menyangkut kesiapan serta kualifikasi keakhlian personil yang akan melaksanakan survei dan pemeriksaan kelengkapan dan kelayakan peralatan yang akan digunakan. Mengumpulkan data-data sekunder; yaitu mengumpulkan data-data
penunjang survei seperti peta-peta untuk pembuatan peta kerja, data iklim serta cuaca lokasi survei, literatur atau laporan hasil penelitian yang sesuai dengan survei yang akan dilaksanakan.
Mempersiapkan peta kerja; yaitu pembuatan peta kerja untuk pelaksanaan survei lokasi berdasarkan standar yang telah ditentukan untuk kebutuhan kerekayasaan. Peta kerja mencakup : rencana penyebaran titik kerangka dasar horisontal, rencana survei batimetri, rencana survei geofisika, rencana pengamatan pasut, dan rencana pengamatan meteorologi dan oseanografi. Mempersiapkan ROS (Rencana Operasional Survei); yaitu mempersiapkan
c. Survei pendahuluan
Survei pendahuluan dimaksudkan untuk melihat secara visual mengenai keadaan di lapangan yang sebenarnya sebelum pelaksanaan survei dilakukan. Survei pendahuluan meliputi kegiatan antara lain :
Melihat kondisi dan situasi lokasi survei seperti ketersediaan jaringan listrik, sarana transportasi, akomodasi, logistik, serta adat istiadat masyarakat setempat.
Pengidentifikasian titik-titik ikat yang ada di lapangan untuk keperluan pengikatan dan kontrol survei.
Pengdentifikasian lokasi yang akan dijadikan pemasangan BM titik-titik ikat yang baru, lokasi penempatan statsiun referensi, serta lokasi penempatan statsiun pasut.
Menyiapkan basecamp yang akan dijadikan sebagai pusat koordinasi pengumpulan data lapangan, pra-pengolahan data, serta kontrol kegiatan yang telah dilaksanakan, sedang dilaksanakan, dan yang akan dilaksanakan.
Menyiapkan sarana transportasi untuk kegiatan survei, dalam hal ini pelaksanaan survei terkonsentrasi di laut maka diperlukan kapal serta logistik penunjangnya. Pemilihan jenis kapal survei merupakan hal yang sangat penting karena akan mempengaruhi kapasitas kerja di lapangan, hal-hal yang harus dipertimbangkan dalam pemilihan jenis kapal yang akan digunakan dalam survei adalah : kestabilan dalam berlayar di laut, daya tampung kapal, keandalan dari mesin dan sistem kelistrikan kapal, kemampuan beroperasi selama 24 jam, fasilitas serta ukuran laboratorium pengolahan data survei, ukuran dek/kabin, level noise dari mesin kapal, fasilitas penjangkaran untuk laut dalam, serta keakhlian dari kru kapal.
Dari hasil survei pendahuluan tersebut diharapkan dapat menyempurnakan rencana kerja yang telah dibuat sebelumnya, serta mendapatkan data-data tambahan serta material penunjang survei.
3.2. Pelaksanaan Survei Lokasi
Pelaksanaan pekerjaan survei di lapangan dapat dilakukan setelah seluruh perencanaan dan persiapan awal selesai dilakukan, pelaksanaan survei mengikuti rencana teknis yang telah disusun pada peta kerja dengan menggunakan metode dan peralatan yang umum digunakan dalam survei di lepas pantai.
3.2.1 Penentuan Posisi di Laut a. Kerangka Dasar Geodetik
Kemajuan teknologi pemetaan dan penentuan posisi memberi banyak manfaat pada penentuan posisi suatu obyek di laut, tersedianya teknologi penentuan posisi yang berbasis satelit memberikan efisiensi dan fleksibilitas pada aktifitas penentuan posisi. NAVSTAR GPS (NAVigation Satellite Timing and Ranging Global Positioning System) atau biasa disebut GPS adalah sistem satelit navigasi yang memungkinkan untuk memberikan posisi suatu oyek yang berada di permukaan bumi. Penggunaan GPS dalam penentuan posisi relatif tidak terpengaruh dengan kondisi topografis dan pantai sekitar daerah survei lokasi, dan jarak kawasan survei lokasi dari pantai/daratan, jika dibandingkan dengan penggunaan metode optik maupun elektronik yang memiliki keterbatasan dalam jangkauan jarak.
Daerah lautan umumnya adalah daerah yang terbuka ruang pandangnya ke luar angkasa, maka penggunaan GPS di laut pada umumnya dapat berjalan efektif dan efisien. Dalam penggunaan datum, posisi yang ditentukan oleh GPS akan mengacu pada suatu datum global WGS-1984 (World Geodetic System-1984), ini berarti setiap posisi yang diberikan oleh GPS akan selalu mengacu pada datum yang sama tidak tergantung pada lokasi dari daerah survei laut yang dilaksanakan. Ellipsoid yang digunakan dalam WGS-1984 adalah GRS-1980 (Geodetic Reference System-1980) yang memiliki parameter-parameter :
Setengah sumbu panjang (jari-jari ekuator a) = 6378137,000 m. Setengah sumbu pendek (jari-jari kutub b) = 6356752,3142 m Eksentrisitas (e2) = 0,0066943800047
Di Indonesia proyeksi peta yang digunakan untuk peta laut adalah proyeksi UTM. Proyeksi transverse mercator merupakan proyeksi silinder-transversal-konform, yaitu menggunakan bidang proyeksi silinder dengan sumbu simetri bidang proyeksi tegak lurus dengan sumbu ellipsoid (transverse) dan tidak terjadi distorsi sudut/bentuk, dimana area di sekitar meridian yang bersinggungan dengan silinder mempunyai distorsi yang minimum. Proyeksi UTM (Universal Transverse Mercator) khusus dipakai di seluruh dunia dengan menggunakan meridian pusat standar setiap 60.
Gambar 3.1 Sistem Proyeksi Transverse Mercator Karakteristik dari proyeksi UTM antara lain :
Wilayah penggunaan meliputi 840 LU sampai dengan 800 LS.
Koordinat proyeksi ditetapkan sumbu-X sebagai proyeksi lintang nol (ekuator) dan sumbu-Y sebagai proyeksi dari meridian sentral di setiap zona yang disebut dengan sistem koordinat yang mengacu pada titik nol sejati. Koordinat proyeksi UTM dinyatakan terhadap titik nol semu, konsep ini
digunakan supaya tidak ada koordinat yang berharga negatif. Koordinat Xsemu = Xsejati + 500000 m.
Koordinat Ysemu = Ysejati + 10000000 m, untuk belahan bumi bagian selatan.
Faktor skala di meridian sentral = 0,9996.
b. Metode Penentuan Posisi di Laut
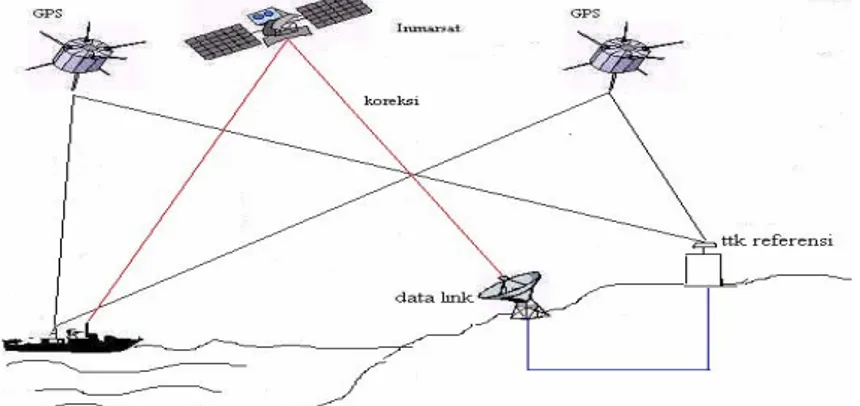
Penentuan posisi horisontal titik-titik fiks perum pada saat ini (survei di lepas pantai) umumnya menggunakan sistem GPS diferensial, metode ini digunakan untuk penentuan posisi diferensial kinematik secara real-time menggunakan data fase ataupun pseudorange. Sistem ini umumnya digunakan untuk penentuan posisi
obyek-obyek yang bergerak, dalam kasus penentuan posisi di lingkungan laut umumnya obyek yang akan ditentukan posisinya (kapal survei) selalu bergerak.
Sistem RTK (Real Time Kinematic) digunakan untuk penentuan posisi real time secara diferensial menggunakan data fase, satu receiver GPS ditempatkan pada base-station (statsiun referensi) dan satu receiver pada rover-base-station (kapal survei). Implementasi dari tuntutan real time-nya statsiun referensi harus mengirimkan data fase dan pseudorange-nya ke kapal survei dengan menggunakan sistem komunikasi data tertentu seperti divisualisasikan gambar 3.2.
Gambar 3.2 Penentuan posisi titik fiks perum dengan metode RTK, dimana statsiun referensi mengirim data koreksi ukuran menggunakan satelit komunikasi (misal :
Inmarsat) ke kapal survei
3.2.2 Survei Batimetri
a. Metodologi Pemeruman
Untuk mengukur kedalaman digunakan ehcosounder atau alat perum gema yang memanfaatkan gelombang akustik. Echosounder terdiri atas dua jenis yaitu single-beam echosounder dan multi-single-beam echosounder.
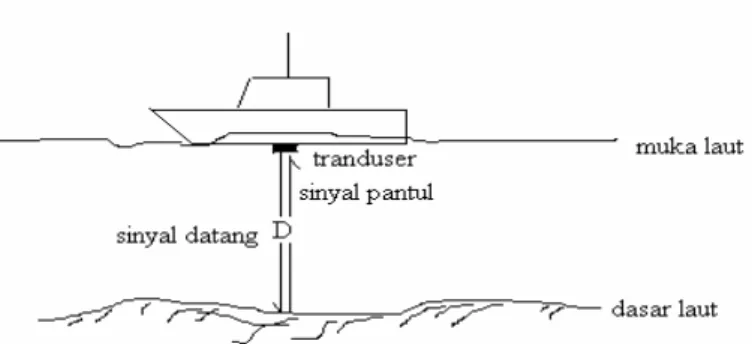
Single-beam echosounder digunakan untuk mendapatkan profil kedalaman yang kontinyu sepanjang lajur perum dengan ketelitian yang cukup baik. Echosounder memanfaatkan prinsip pengukuran jarak dengan menggunakan gelombang akustik yang dipancarkan oleh tranduser. Tranduser merupakan bagian dari sistem echosounder, alat ini berfungsi untuk mengubah energi listrik menjadi energi mekanik (membangkitkan gelombang akustik) dan sebaliknya. Gelombang akustik
tersebut lalu dirambatkan pada medium air dengan kecepatan rambat yang relatif diketahui, dan sampai pada dasar perairan lalu dipantulkan kembali ke tranduser seperti divisualisasikan gambar 3.3.
Gambar 3.3 Cara kerja alat perum gema (single-beam echosounder)
Prinsip yang digunakan adalah dengan mengukur waktu yang diperlukan untuk suatu gelombang akustik merambat dari tranduser ke dasar laut dan dipantulkan kembali, waktu yang diukur adalah selang waktu sejak gelombang dipancarkan dan diterima kembali (∆t), sehingga jarak dasar laut relatif terhadap tranduser (D) dapat diperoleh melalui formula :
D = ½ (∆t . VR)
dengan ;
∆t : Waktu tempuh sinyal (s)
VR : Kecepatan rata-rata gelombang akustik pada medium air (m/s)
Multi-beam echosounder digunakan untuk mendapatkan gambaran relief dasar laut dalam arah melintang dari jalur survei, sehingga dengan menggabungkan data yang diperoleh dari hasil pemeruman dengan menggunakan single-beam echosounder didapatkan gambaran relief dasar laut yang menggambarkan keadaan yang sebenarnya. Prinsip kerja multi-beam echosounder hampir sama dengan single-beam echosounder hanya yang membedakannya adalah jumlah pancaran (beam) gelombang akustiknya lebih dari satu sehingga dapat menjangkau area di antara 2 lajur survei (area melintang) seperti divisualisasikan gambar 3.4.
Gambar 3.4 Cara kerja alat perum gema (multi-beam echosounder) dalam mengirim pulsa gelombang dengan jumlah yang besar dalam satu kali pemancaran pulsa (ping)
b. Cara Pengukuran
Pengukuran kedalaman dilakukan pada lajur perum dan titik-titik yang telah ditentukan. Lajur-lajur pemeruman dibagi atas seksi-seksi sesuai dengan luas wilayah laut yang akan dipetakan. Pemeruman silang harus dilakukan untuk memeriksa ketelitian posisi dan ketelitian kedalaman, dengan jarak antar lajur perum silang umumnya tidak melebihi 10 kali jarak antar lajur perum utama. Selain dilakukan pengukuran kedalaman juga dilakukan penentuan posisi titik-titik fiks perum dan pencatatan waktu saat pengukuran untuk keperluan reduksi kedalaman hasil pengukuran terhadap pasut. Pencatatan waktu dan penentuan posisi dilakukan secara simultan dengan pengukuran kedalaman..
Dalam pengukuran kedalaman dengan alat perum gema tidak lepas dari berbagai kesalahan, sehingga harus dilakukan koreksi terhadap hasil ukuran. Koreksi yng harus dilakukan adalah :
Salah sistematik alat
Peralatan sounding sistem digital umunya telah minimal dari kesalahan ini, karena kesalahan sistematik tersebut umumnya bersumber dari bagian mekanis peralatan dalam menterjemahkan sinyal kedalaman dalam bentuk grafis seperti misalnya
ketidak tepatan kecepatan penggulungan keras perekaman/echogram dan pergerakan jarum pencetakan. Kesalahan ini dapat dideteksi dengan melakukan kalibrasi untuk kemudian diset kembali ke nilai sebenarnya dalam proses kalibrasi alat.
Koreksi kecepatan bunyi
Kecepatan gelombang bunyi berkaitan dengan media yang dilaluinya, juga dipengaruhi oleh tekanan, temperatur, dan masa jenis media yang dilaluinya. Salah satu metode pemberian koreksi ini adalah model matematika dari Wilson (dengan anggapan tekanan hidrostatik linier dengan kedalaman air laut) dapat digunakan sebagai dasar pemberian koreksi :
V = 1449.2 + 4.6 t – 0.055 t 2 + 0.00029 t 3 + (1.34 – 0.010 t) (S – 35) + 0.016 d dengan ; t : Suhu ( ° C ) P : Tekanan udara ( Kg / Cm3 ) S : Salinitas ( 0/00 ) d : Kedalaman ( m )
Untuk memenuhi pengukuran kedalaman yang teliti (umumnya di perairan dangkal), alat perum gema menyediakan tombol pengatur kecepatan gelombang suara (tombol pengatur kecepatan stilus).
Kesalahan ini juga dapat dikoreksi dengan melakukan koreksi bar check, bar check terbuat dari lempeng logam berbentuk lingkaran atau segi empat yang digantungkan pada tali atau rantai berskala yang diletakan di bawah tranduser. Tali atau rantai berskala tersebut dipakai sebagai pembanding hasil pengukuran dengan echosounder, pembandingan pengukuran kedalaman dilakukan untuk setiap perubahan kedalaman mulai dari kedalaman 0 m hingga kedalaman maksimum yang akan diperum dengan interval 1 m. dari kedalaman maksimum, bar check ditarik kembali dengan interval 1 m hingga kembali pada kedudukan 1 m di bawah tranduser. Kalibrasi dengan bar check harus dilakukan sebelum dan sesudah pemeruman pada satu sesi atau satu hari pengukuran. Hasil pengukuran dengan bar check dibandingkan dengan skala bacaan kertas perum, yang menghasilkan table kalibrasi pemeruman. Tabel kalibrasi tersebut dipakai untuk memberi koreksi pada hasil pengukuran kedalaman, hasil pengukuran
kedalaman yang telah dikoreksi dengan kalibrasi menggunakan bar check dapat dianggap terbebas dari sumber kesalahan alat perum gema. Pada saat pengamatan bar check, dilakukan penyetelan kecepatan gelombang suara, maka koreksi kecepatan gelombang suara tidak perlu lagi diberikan pada data ukuran kedalaman, dengan catatan hal ini hanya berlaku sampai kedalaman maksimum bar check (efektif sampai dengan ± 10 m).
Draft Tranduser
Yaitu perubahan kedalaman transduser yang terjadi apabila kapal sedang bergerak maju, perubahan tersebut adalah :
− Settlement, yaitu perubahan yang disebabkan oleh semakin turunnya perahu bila bergerak maju.
− Squate, yaitu perubahan yang disebabkan oleh turunnya buritan perahu pada saat bergerak maju sedangkan haluan kapal terangkat, sehingga dengan meletakan transducer ditengah antara buritan dengan haluan kapal maka kesalahan tersebut dapat diperkecil.
Kedua kesalahan tersebut sulit sekali diamati dengan peralatan yang sederhana, solusinya adalah tranduser ditempatkan dibagian tengah kapal dan perlu dihindari pengukuran pada saat gelombang besar. Untuk menghindari offset posisi, penempatan receiver GPS diletakan tepat di atas posisi transduser.
3.2.3 Pencitraan Dasar Laut a. Metodologi Pencitraan
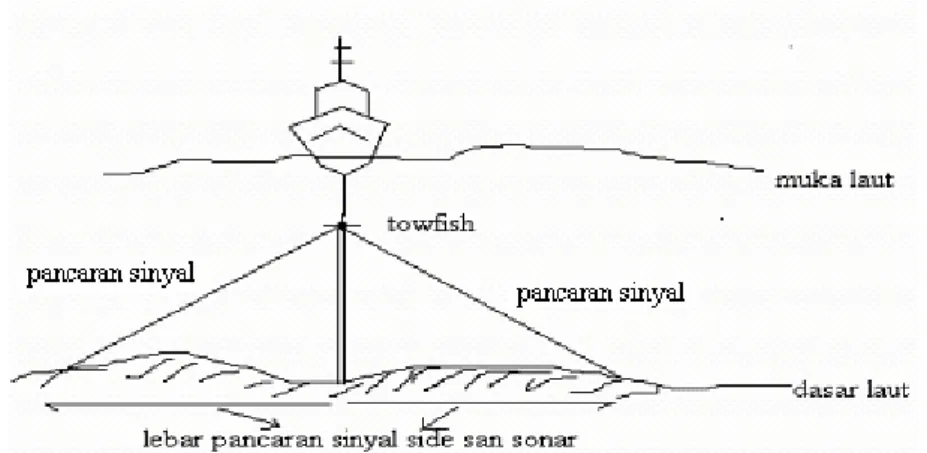
Untuk mendapatkan citra dasar laut digunakan alat yang dinamakan side scan sonar. Sistem side scan sonar terdiri atas instrumen perekam dan tranduser dual chanel (towfish), towfish ditarik di bawah permukaan laut oleh kapal survei dengan menggunakan kabel. Tranduser memancarkan gelombang akustik ke dalam medium air dan gelombang tersebut memindai (scanning) permukaan dasar laut. Pantulan gelombang akustik dari dasar laut atau obyek lainnya yang terdapat di dasar laut diterima oleh hidropon yang terdapat dalam sistem tranduser, proyeksi dari
permukaan dasar laut tersebut lalu direkam dalam bentuk citra, proses pencitraan dengan side scan sonar divisualisasikan gambar 3.5.
Gambar 3.5 Pencitraan permukaan dasar laut dengan side scan sonar
b. Cara Pengukuran
Pencitraan dilakukan dengan mengikuti lajur pemeruman, dan biasanya pencitraan dilakukan secara simultan dengan pemeruman. Saat pencitraan berlangsung, gelombang-gelombang akustik dipancarkan dengan selang pemancaran dan panjang gelombang tertantu, pemancarannya disesuaikan dengan lebar/jangkauan pencitraan yang dipilih. Jangkauan pencitraan adalah radius yang dicapai oleh setiap gelombang yang dipancarkan, dengan menggunakan peralatan side scan sonar yang umum dipakai sekarang jangkauan pencitraan bisa mencapai radius 7 kali kedalaman laut tempat dilakukannya pencitraan. Kecepatan kapal ketika bekerja diatur dan disesuaikan dengan panjang bentangan kabel & tali yang menghela towfish, pemberat towfish, jenis penekan (depressor), dan kedalaman rencana. Umumnya pada alat side scan sonar dilengkapi dengan diagram-diagram yang dapat digunakan untuk merencanakan kecepatan kapal berdasarkan panjang kabel yang digunakan, panjang kabel & tali penghela towfish tidak kurang dari 3 kali panjang kapal, untuk mencegah terjadinya interferensi transmisi gelombang yang berasal dari kapal.
Kedudukan towfish harus selalu dikontrol supaya towfish tidak berotasi pada sumbunya serta ketinggian towfish dari dasar laut diusahakan konstan. Pada saat survei, kapal tidak boleh berhenti secara mendadak yang memungkinkan towfish kandas di dasar laut, dan jika melakukan manuver (berbelok) harus dengan jari-jari
3.2.4 Survei Seismik
a. Metodologi Survei Seismik
Sistem instrumen seismik terdiri atas sumber energi pemancar gelombang seismik, receiver (hidropon), dan perekam refleksi gelombang seismik. Keberhasilan akuisisi data seismik tergantung pada jenis sumber energi yang dipilih/digunakan, sumber energi seismik tersebut dibagi menjadi 2 yaitu sumber energi vibrator dan sumber energi impulsif.
Sumber energi vibrator merupakan sumber energi dengan durasi beberapa detik dengan panjang sinyal input bervariasi, gelombang outputnya berupa gelombang sinusoidal. Sedang sumber impulsif adalah sumber energi seismik dengan transfer energinya terjadi secara cepat dan suara yang dihasilkan sangat kuat, singkat, dan tajam.
Gelombang-gelombang pantul dari setiap lapisan bumi di bawah dasar laut diterima oleh hidropon, hidropon ini merespon terhadap perubahan tekanan, hal ini akan menghasilkan beda potensial output. Karena output dari hidropon tersebut sangat lemah dan juga berlangsung dalam waktu yang sangat singkat maka sinyal ini harus diperkuat oleh amplifier. Amplifier ini dilengkapi dengan filter untuk meredam frekuensi yang tidak diinginkan (Sanny, 2004).
b. Cara Pengukuran
Metode survei seismik dilakukan dengan dua cara yaitu sub-bottom profiling dan hi-res seismic.
Sub Bottom Profiling
Sub-bottom profiling dilakukan untuk menentuan ketebalan dan struktur lapisan tanah dasar laut sampai dengan kedalaman minimal 3 m pada lokasi survei. Pengidentifikasian dilakukan dengan sub-bottom profiler, yang memancarkan gelombang seismik dengan frekuensi yang tinggi sehingga dapat memberikan gambaran struktur lapisan tanah dasar laut.dengan resolusi yang tinggi. Refleksi gelombang seismik dari lapisan dasar laut diterima oleh hidrofon.
Pengukuran menggunakan sub-bottom profiler dilakukan sepanjang rute survei batimetri dan mencakup seluruh area survei. Sub-bottom profiler ditarik di bawah permukaan laut oleh kapal dengan menggunakan kabel, kecepatan kapal ketika bekerja diatur dan disesuaikan dengan panjang bentangan kabel & tali yang menghela towfish, pemberat towfish dan jenis penekan (depressor) yang diberikan, dan kedalaman rencana. Panjang kabel & tali penghela towfish tidak kurang dari 3 kali panjang kapal, untuk mencegah terjadinya interferensi transmisi gelombang yang berasal dari kapal. Kedudukan towfish harus selalu dikontrol supaya towfish tidak berotasi pada sumbunya serta ketinggian towfish dari dasar laut diusahakan konstan., pengukuran dengan sub-bottom profiler divisualisasikan gambar 3.6.
Gambar 3.6 Operasional sub-bottom profiling dengan sebuah tranduser (towfish) yang memancarkan gelombang seismik dan pantulannya diterima kembali oleh
sebuah hidrofon. Hi-res Seismic
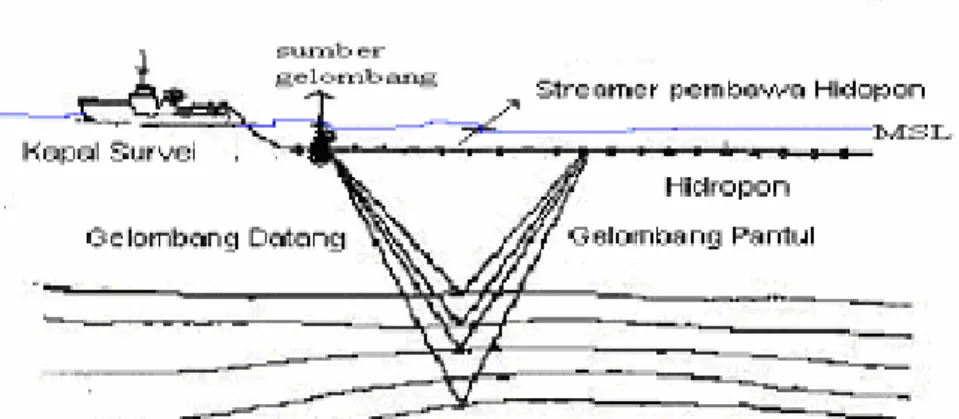
Hi-res seismic dilakukan untuk memperoleh gambaran lapisan tanah dasar laut sampai dengan kedalaman beberapa ratus meter, prinsip pengukuran dengan hi-res seismic hampir sama dengan sub-bottom profiler yang berbeda adalah frekuensi gelombang seismik yang digunakan adalah frekuensi yang rendah supaya jangkauan penetrasi gelombang seismiknya lebih dalam, dan untuk meningkatkan resolusinya jumlah hidropon yang digunakan untuk menerima refleksi gelombang seismik lebih dari satu (multi channel seismic) seperti divisualisasikan gambar 3.7.
Gambar 3.7 Operasional hi-res seismic dengan satu tranduser (towfish) yang memancarkan gelombang seismik dan pantulannya diterima oleh beberapa
hidrofon yang ditarik oleh streamer.
Survei hi-res seismic dilakukan sepanjang rute survei batimetri dan mencakup seluruh area survei.
3.2.5 Survei Magnetik
a. Metodologi Survei Magnetik
Alat yang digunakan untuk pendeteksian material logam di dasar laut adalah magnetometer, alat ini akan melakukan sistem pemindaian (scanning) berdasarkan prinsip kerja medan magnet. Pada magnetometer jenis flux-gate untuk menghasilkan medan magnet sepasang logam dililiti oleh kumparan yang dialiri arus listrik sehingga logam tersebut bermuatan magnet, ketika magnetometer memindai material yang mengandung intensitas magnetik, medan magnet yang terdapat pada magnetometer terganggu oleh adanya intensitas magnetik yang berasal dari material yang berada di dasar laut. Gangguan medan magnet tersebut dikonversi kembali menjadi arus listrik dan besarnya perubahan arus listrik akibat gangguan tersebut dideteksi dengan voltmeter seperti divisualisasikan gambar 3.8.
Gambar 3.8 Prinsip kerja magnetometer jenis flux-gate yang mendeteksi induksi magnet dari luar berupa perubahan arus yang dideteksi oleh voltmeter
(www.gp.uwo.ca)
Selain dengan menggunakan magnetometer jenis flux-gate, pengukuran intensitas magnetik juga dapat dilakukan dengan menggunakan proton precession magnetometer, alkali vapour magnetometer yang memiliki keakuratan lebih baik daripada jenis flux-gate magnetometer.
b. Cara Pengukuran
Survei dilakukan dengan mengikuti jalur survei batimetri dan mencakup seluruh area survei. Magnetometer ditarik dibawah permukaan air oleh kapal dengan menggunakan kabel, kedalaman towfish diatur sesuai kedalaman laut, untuk itu data batimetri dapat digunakan sebagai acuan. Kecepatan kapal ketika bekerja diatur dan disesuaikan dengan panjang bentangan kabel & tali yang menghela towfish, pemberat towfish dan jenis penekan (depressor). Panjang kabel & tali penghela towfish tidak kurang dari 3 kali panjang kapal, untuk mencegah terjadinya interferensi transmisi gelombang yang berasal dari kapal. Kedudukan towfish harus selalu dikontrol supaya towfish tidak berotasi pada sumbunya serta ketinggian towfish dari dasar laut diusahakan konstan.
3.2.6 Survei Geoteknik
Pengambilan sampel sedimen dan tanah dasar laut dibedakan berdasarkan kedalaman laut, dimana pada laut dangkal digunakan Grab Sampler sedangkan pada laut dalam menggunakan Piston Gravity Core.
Mekanisme piston gravity core yaitu dengan cara dijatuhkan ke dasar laut sehingga menembus lapisan tanah dasar laut, lapisan tanah tergerus dan masuk kedalam lubang piston. Sedimen yang terangkat berasal dari ketebalan lapisan dasar laut dan diharapkan dapat menjelaskan tegangan geser, dan ketebalan lumpur yang mengambang dari sedimen yang diamati
3.2.7 Pengamatan Pasut
a. Metodologi Pengamatan Pasut
Metode yang paling sederhana dalam mengamati pasut adalah dengan menggunakan palem atau rambu pengamat pasut, pada palem terdapat tanda-tanda skala bacaan dalam satuan desimeter. Pengamat mengamati tinggi muka air laut relatif terhadap palem pada jam-jam tertentu sesuai dengan skala bacaan yang tertera pada palem dan dicatat pada formulir pengamatan pasut. Tinggi palem disesuaikan dengan karakter tunggang pasut pada wilayah yang diamati pola pasutnya.
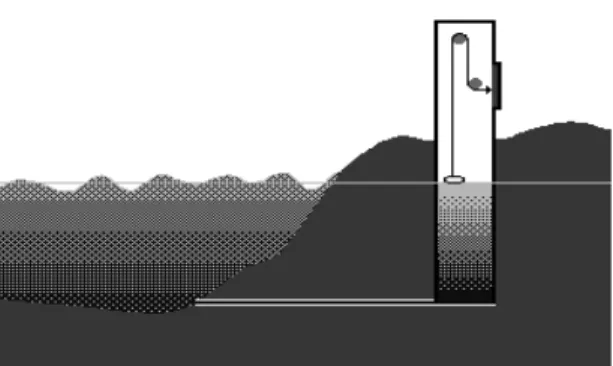
Selain dengan metode manual seperti diatas ada pula cara mekanik yaitu dengan menggunakan tide gauge, gerakan naik dan turunnya air laut dideteksi dengan sebuah pelampung yang digantungkan pada kawat baja. Kawat baja tersebut digulungkan pada suatu silinder penggulung, sebuah sistem mekanik melakukan peredaman dan konversi gerakan silinder penggulung kawat baja dari ke arah vertikal menjadi ke arah horisontal. Gerakan horisontal bolak-balik tersebut disambungkan pada sebuah pena yang menggoreskan tinta pada gulungan kertas perekam data yang digulungkan pada silinder. Pelampung diletakkan pada pipa dalam sistem bejana untuk mereduksi gerak muka laut sesaat karena angin atau gelombang seperti divisualisasikan gambar 3.9.
Gambar 3.9 Prinsip pengamatan pasut dengan tide gauge yang mendeteksi perubahan tinggi muka air melalui sebuah pelampung yang dihubungkan dengan
pipa sebagai jalan masuk air laut.
b. Cara Pengukuran
Pengamatan pasut dilakukan dengan mengambil sampel data tinggi muka air laut pada suatu selang (periode) waktu tertentu. Idealnya, pengamatan pasut dilakukan selama selang waktu keseluruhan periodisasi benda-benda langit yang mempengaruhi terjadinya pasut telah kembali pada posisi semula. Pengamatan pasut untuk keperluan reduksi kedalaman dilakukan terus menerus pada saat pemeruman dilakukan. Lama pengamatan pasut untuk penentuan bidang referensi kedalaman dilakukan 15 atau 29 piantan (1 piantan = 25 jam), dengan interval pengamatan maksimal 30 menit, atau jika perubahan ketinggian air berjalan dengan cepat dan tunggang airnya besar, interval pengamatan bisa lebih dirapatkan.
c. Pengikatan Statsiun Pasut
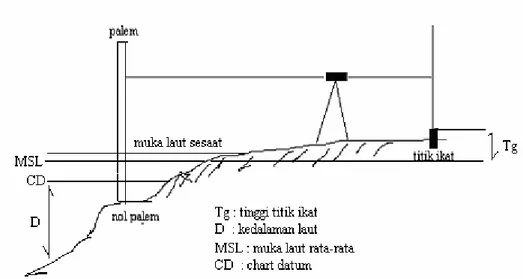
Ketinggian suatu obyek di darat atau kedalaman suatu titik di laut ditentukan secara relatif terhadap suatu bidang yang disepakati sebagai referensi tinggi atau datum vertikal. Pengukuran kerangka dasar vertikal dimaksudkan untuk mendapatkan ketinggian titik-titik kerangka dasar horisontal yang akan digunakan untuk mengikatkan kedudukan MSL (Mean Sea Level) dan CD (Chart Datum) dari hasil pengamatan pasut, sehingga kedudukan atau ketinggian relatif MSL dan CD terhadap titik-titik tetap di darat dapat diketahui.
tinggi dengan menggunakan waterpass dilakukan pergi-pulang untuk untuk memperoleh beda tinggi antara nol palem (statsiun pasut) dengan titik-titik referensi seperti divisualisasikan gambar 3.9.
Gambar 3.10 Skema pengikatan statsiun pasut dengan pengukuran beda tinggi antara statsiun pasut dengan BM.
3.2.8 Pengamatan Sifat Fisik Air Laut
Pengamatan sifat fisik air laut dilakukan dengan menggunakan peralatan antara lain : Water Sampler, alat ini digunakan untuk pengamatan suhu dan
salinitas air laut dengan cara pengambilan contoh (sampel) air laut pada kedalaman tertentu.
Temperatur dan salinitas profiler, yaitu alat pencatat langsung suhu dan salinitas yang bekerja dengan sensor elektronik yang mengukur suhu dan salinitas di sepanjang kolom kedalaman.
3.2.9 Pengamatan Arus
a. Metodologi Pengamatan Arus
Pengukuran arus bisa dilakukan dengan instrumen mekanik dan instrumen akustik, pada metode mekanik digunakan alat pengukur arus yang disebut current meter. Prinsip kerja alat ini adalah secara mekanik, gerakan badan air memutar baling-baling yang dihubungkan dengan sebuah roda gigi, pada roda gigi ini terdapat penghitung (counter) dan pencatat waktu (timer) yang merekam jumlah putaran baling-baling untuk setiap satuan waktu. Jumlah putaran persatuan waktu yang dicatat dari alat ini kemudian dikonversi ke kecepatan arus dalam satuan meter per detik (m/s).
Metode akustik merupakan metode yang umum digunakan saat ini untuk mengukur arus, pada alat akustik (ADCP) gelombang dipancarkan melalui tranduser dan merambat sepanjang kolom air. Pada suatu lapisan air yang diukur kecepatan arusnya gelombang dipantulkan kembali menuju tranduser oleh partikel sedimen dan plankton yang bergerak dengan kecepatan yang sama dengan kecepatan gerakan air. Karena adanya gerak relatif pemantul gelombang terhadap alat ukur akustik, maka gelombang yang diterima akan mengalami perubahan frekuensi. Perubahan frekuensi ini sebanding dengan perbedaan kecepatan antara alat ukur arus akustik dengan lapisan air yang diukur arusnya.
b. Cara Pengukuran
Teknik pengukuran arus dapat dilakukan dengan pendekatan Lagrangian atau Eulerian. Pendekatan Lagrangian dilakukan dengan pengamatan gerakan massa air permukaan dalam rentang waktu tertentu, sedangkan pendekatan Eulerian dilakukan dengan pengamatan kekuatan dan arah arus pada suatu posisi tertentu di suatu kolom air sebagai fungsi dari waktu.
3.2.10 Pengamatan Gelombang
Parameter yang diukur adalah tinggi gelombang, perioda, panjang gelombang, serta cepat rambat gelombang. Pengukuran dilaksanakan selama survei lapangan
berlangsung, alat yang digunakan adalah instrumen pencatat gelombang otomatis yang menggunakan frekuensi gelombang akustik. Prinsip kerjanya hampir sama dengan alat pengukur arus secara akustik, instrumen ini secara otomatis mencatat gelombang setiap jam sekali dengan mencatat variasi muka air selama terus menerus dengan interval waktu tertentu, dari catatan perubahan tinggi muka air ini kemudian dihitung tinggi dan perioda gelombang rata-rata serta periode gelombang signifikannya.
3.2.11 Pengamatan Meteorologi
Pengamatan meteorologi meliputi pengamatan suhu udara, tekanan udara, kelembaban, serta angin
a. Pengamatan Suhu
Yang biasa disebut suhu udara adalah suhu yang diukur dengan termometer, pengukuran suhu udara biasanya diukur dengan menggunakan termometer air raksa. Frekuensi dan waktu pengamatan dapat dilakukan per jam dengan lama pengamatan 3-8 jam untuk mendapatkan suhu harian rata-rata.
b. Pengamatan Tekanan Udara
Tekanan udara adalah tekanan yang diberikan oleh udara pada setiap bidang datar permukaan bumi seluas 1 cm2, tekanan udara berkurang menurut ketinggian, semakin tinggi suatu tempat semakin rendah tekanannya. Besarnya tekanan udara diukur dengan menggunakan barometer ataupun barograf.
c. Pengamatan Kelembaban Udara
Yang dimaksud dengan kelembaban udara adalah banyaknya uap air yang terkandung di dalam udara, kelembaban biasanya diukur dengan menggunakan higrometer.
d. Pengamatan Angin
Pengamatan yang dilakukan adalah dengan mengukur arah serta kecepatan angin, untuk menentukan arah angin digunakan sebuah panah dengan pelat pengarah,
pergerakan pelat pengarah ini dihubungkan dengan lingkaran arah angin yang menunjukan arah angin tersebut seperti pada pembacaan skala kompas. Kecepatan angin diukur dengan menggunakan anemometer, prinsip kerja alat ini adalah secara mekanik, gerakan udara memutar baling-baling yang dihubungkan dengan sebuah roda gigi, pada roda gigi ini terdapat penghitung (counter) dan pencatat waktu (timer) yang merekam jumlah putaran baling-baling untuk setiap satuan waktu. Jumlah putaran persatuan waktu yang dicatat dari alat ini kemudian dikonversi ke kecepatan angin dalam satuan meter per detik (m/sec). Contoh anemometer dvisualisasikan gambar 3.11.