1 LAPORAN RESMI PRAKTIKUM
INSTRUMENTASI AKUSTIK DAN VIBRASI – P1
VIBRASI DAN JENIS KERUSAKAN POMPA AIR
Di Susun Oleh :
Rizky Kurniasari Kusuma Pratiwi NRP. 2413 031 058
Asisten : Rio Asruleovito NRP. 2414 105 050
PROGRAM STUDI D3 METROLOGI DAN INSTRUMENTASI JURUSAN TEKNIK FISIKA
FAKULTAS TEKNOLOGI INDUSTRI
INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA
i LAPORAN RESMI PRAKTIKUM
INSTRUMENTASI AKUSTIK DAN VIBRASI – P1
VIBRASI DAN JENIS KERUSAKAN POMPA AIR
Di Susun Oleh :
Rizky Kurniasari Kusuma Pratiwi NRP. 2413 031 058
Asisten : Rio Asruleovito NRP. 2414 105 050
PROGRAM STUDI D3 METROLOGI DAN INSTRUMENTASI JURUSAN TEKNIK FISIKA
FAKULTAS TEKNOLOGI INDUSTRI
INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA
iii
PRAKTIKUM 1
VIBRASI DAN JENIS KERUSAKAN POMPA AIR
Nama
: Rizky Kurniasari Kusuma Pratiwi
NRP
: 2413 031 058
Program Studi
: D3 Metrologi dan Instrumentasi
Jurusan
: Teknik Fisika, FTI-ITS
Asisten
: Rio Asruleovito
ABSTRAKGetaran adalah gerakan yang teratur dari benda atau
media dengan arah bolak-balik dari kedudukan seimbang.
Aplikasi ilmu getaran telah banyak diterapkan. Diantaranya
adalah untuk mengetahui jenis kerusakan pada pompa air
dengan menganalisa frekuensi kerusakan pompa. Hal ini
dilakukakan dengan menempatkan sensor accelerometer
pada posisi axial dan radial (vertikal dan horizontal)
terhadap sumbu pusat putaran pompa. Untuk mendapatkan
frekuensi putaran pompa menggunakan stroboscop, yakni
alat untuk memperlambat gerakan benda yang bergerak.
Kerusakan pompa pada umumnya antara lain yaitu
unbalance, misalignment, kerusakan pada bearing, dan
loseness.
Data tersebut menghasilkan bahwa pompa 1, 2 (baik axial maupun horizontal) dan pompa 3 merupakan jenis kerusakan pompa unbalance.Pompa 1 pada posisi vertikal
merupakan jenis kerusakan pompa paralell misalignment.
Dan pompa 2 pada posisi vertikal merupakan jenis
kerusakan pompa angular misalignment.
Kata Kunci : Getaran, Kerusakan, Pompa, Accelerometer,
Stroboscope, Unbalance, Misalignment
v
PRACTICUM 1
VIBRATION DAMAGE AND TYPE OF WATER PUMP Name : Rizky Kurniasari Kusuma Pratiwi
NRP : 2413 031 058
Program Study : D3 Metrologi dan Instrumentasi Department : Teknik Fisika, FTI-ITS
Assistant : Rio Asruleovito ABSTRACT
The vibrtation is a regular from the media to the direction of a balanced commuting between. Application of vibration have been applied. Including to knowledge of the damage to the pumps by analyzing the pump damage .Thie conducted by placing censorship accelerometer on the axial and radial (vertical and horizontal ) against the central axis of the pump. To get round use the pump stroboscope , namely a tool to slow motion moving body. Damage the pump in a general among others are unbalance , misalignment , damage to bearing , and loseness. The data produce that pump 1 , 2 ( axial and horizontally ) and pumps 3 is the type of damage unbalance pump. Pump 1 on a vertical position is the type of damage paralell misalignment . And pump 2 on a vertical position is the type of damage angular misalignment.
Keywords : Vibration, Damage, Pumps, Accelerometer,
vii
KATA PENGANTAR
Puji syukur kami ucapkan kehadirat Allah SWT karena atas limpahan rahmat serta hidayah-Nya sehingga praktikan mampu menyelasaikan Laporan Resmi Praktikum mata kuliah Instrumentasi Akustik dan Vibrasi yang diselenggarakan oleh Laboratorium Vibrastic Jurusan Teknik Fisika ITS dengan tepat waktu.
Dalam laporan ini membahas semua apa yang telah praktikan peroleh dalam praktikum mata kuliah Instrumentasi Akustik dan Vibrasi.
Dalam kesempatan kali ini penulis mengucapkan terima kasih kepada:
1. Dr. Ir. Totok Soehartanto, DEA selaku Ketua Jurusan Teknik Fisika ITS.
2. Dr. Ir. Purwadi Agus Darwito, MSc selaku Ketua Program Studi D3 Metrologi dan Instrumentasi ITS. 3. Ir. Tutug Dhanardono, MT selaku dosen pengajar Mata
Kuliah Instrumentasi Akustik dan Vibrasi.
4. Dr. Dhany Arifianto ST, M.Eng selaku Ketua Laboratorium Vibrastic ITS.
5. Asisten Laboratorium Vibrastic ITS.
6. Semua pihak yang terlibat dalam penyusunan laporan ini. Penulis menyadari bahwa banyak kekurangan dalam pembuatan laporan ini baik dari segi materi maupun penyajian.
Akhir kata penulis berharap semoga laporan ini bermanfaat bagi penyusun sendiri khususnya dan pembaca pada umumnya.
Surabaya, 23 Oktober 2015
ix DAFTAR ISI
HALAMAN JUDUL... i
ABSTRAK ... iii
ABSTARCT ... v
KATA PENGANTAR ... vii
DAFTAR ISI ... ix
DAFTAR GAMBAR ... xi
DAFTAR TABEL ... xiii
BAB I : PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Permasalahan ... 1
1.3 Tujuan ... 1
1.4 Sistematika Laporan ... 2
BAB II : DASAR TEORI 2.1 Pengertian Vibrasi ... 3
2.2 Karakteristik Getaran ... 4
2.3 Jenis Kerusakan Pada Pompa ... 5
2.4 Analisa Vibrasi dengan FFT... 10
2.5 Pengambilan Data Menggunakan Accelerometer .... 11
2.6 Stroboscope ... 12
BAB III : METODOLOGI PERCOBAAN 3.1 Peralatan ... 13
3.2 Prosedur Percobaan ... 13
BAB IV : ANALISIS DATA DAN PEMBAHASAN 4.1 Analisis Data ... 15
4.2 Pembahasan ... 20
BAB V : KESIMPULAN DAN SARAN 5.1 Kesimpulan... 23
5.2 Saran ... 23 DAFTAR PUSTAKA
xi
DAFTAR GAMBAR
Gambar 2.1 Karakteristik dari Getaran ... 5
Gambar 2.2 Spektrum Vibrasi Unbalance ... 6
Gambar 2.3 Angular Misalignment ... 7
Gambar 2.4 Parallel Misalignment ... 8
Gambar 2.5 Bearing Misalignment ... 8
Gambar 2.6 Spektrum Kerusakan Bearing ... 9
Gambar 2.7 Spektrum Vibrasi Looseness ... 9
Gambar 2.8 Hasil FFT dari Data Vibrasi ... 11
Gambar 4.1 Pompa 1 Posisi Axial ... 15
Gambar 4.2 Pompa 1 Posisi Horizontal ... 16
Gambar 4.3 Pompa 1 Posisi Vertikal ... 16
Gambar 4.4 Pompa 2 Posisi Axial ... 17
Gambar 4.5 Pompa 2 Posisi Horizontal ... 17
Gambar 4.6 Pompa 2 Posisi Vertikal ... 18
Gambar 4.7 Pompa 3 Posisi Axial ... 19
Gambar 4.8 Pompa 2 Posisi Horizontal ... 19
xiii
DAFTAR TABEL
1 BAB I PENDAHULUAN 1.1 Latar Belakang
Dalam perkembangan teknologi saat ini, ilmu getaran sangat berperan penting didalamnya.
Mulai dari bidang kedokteran,
bidang pendidikan, bahkan bidang industri. Dalam sebuah
bidang industri misalnya, memerlukan adanya ilmu getaran
agar dapat diketahui tingkat kerusakan pada suatu alat
instrument. Apabila getaran yang dihasilkan melebihi batas
yang diperbolehkan, maka dapat mengganggu lingkungan
sekitar dan membahayakan proses yang sedang berlangsung.
Dengan adanya ilmu getaran yang mempelajari mengenai
kerusakan suatu peralatan, maka dari itu dapat diminimalisir
atau bahkan diatasi.
Langkah yang dilakukan untuk mengatasi masalah kebisingan pada suatu peralatan, memerlukan adanya sebuah analisa yang dapat mendeteksi getaran tersebut. Tingkat kerusakan suatu peralatan dapat dilihat pada getaran yang terjadi pada alat tersebut.Oleh karena itu, perlu dilakukan praktikum mengenai
getaran dan jenis kerusakan, misal jenis kerusakan yang
disebabkan oleh pompa air agar mahasiswa mempunyai dan
mengerti mengenai keterampilan khusus untuk menganalisa
jenis kerusakan yang terjadi pada pompa air.
1.2 Permasalahan
Dari latar belakang di atas, adapun permasalahan dari praktikum pemotongan logam ini, antara lain :
a. Bagaimana cara mengetahui frekuensi dari pompa? b. Bagaimana cara mengetahui jenis kerusakan pompa
dengan menganalisa frekuensi pompa air? 1.3 Tujuan
Adapun beberapa tujuan dari praktikum pemotongan logam ini, antara lain :
2
a. Mengetahui frekuensi pompa.
b. Mengetahui jenis kerusakan pompa dengan menganalisa frekuensi pompa air.
1.4 Sistematika Laporan
Dalam sistematika laporan terdiri dari beberapa bab dan
sub bab yang berisi bab I pendahuluan tentang latar
belakang, rumusan masalah, tujuan, dan sistematika laporan.
Bab II berisi dasar teori yang dapat menunjang beberapa
percobaan. Bab III metodologi percobaan berisi peralatan
percobaan dan prosedur percobaan. Bab IV analisis data dan
pembahasan. Bab V berisi penutup terdiri dari kesimpulan
dan saran.
3 BAB II DASAR TEORI 2.1 Pengertian Vibrasi
Getaran adalah gerakan yang teratur dari benda atau media dengan arah bolak-balik dari kedudukan keseimbangan (KEP-51/MEN/1999).
Vibrasi atau getaran mempunyai tiga parameter yang dapat dijadikan sebgai tolak ukur yaitu :
a. Amplitudo adalah ukuran atau besarnya sinyal vibrasi yang dihasilkan. Amplitudo dari sinyal vibrasi mengidentifikasikan besarnya gangguan yang terjadi. Makin tinggi amplitudo yang ditunjukkan menandakan makin besar gangguan yang terjadi, besarnya amplitudo bergantung pada tipe mesin yang ada. Pada mesin yang masih bagus dan baru, tingkat vibrasinya biasanya bersifat relatif.
b. Frekuensi adalah banyaknya periode getaran yang terjadi dalam satu putaran waktu. Besarnya frekuensi yang timbul pada saat terjadinya vibrasi dapat diidentifikasikan jenis-jenis gangguan yang terjadi. Gangguan yang terjadi pada mesin sering menghasilkan frekuensi yang jelas atau menghasilkan contoh frekuensi yang dapat dijadikan sebagai bahan pengamatan. Dengan frekuensi pada saat mesin mengalami vibrasi, maka penelitian atau pengamatan secara akurat dapat dilakukan untuk mengetahui penyebab dari permasalahan. Frekuensi biasanya ditunjukkan dalam bentuk Cycle per menit (CPM), yang biasanya disebut dengan istilah Hertz (dimana Hz = CPM). Biasanya singkatan yang digunakan untuk Hertz adalah Hz.
c. Phase Vibrasi (Vibration Phase) adalah penggambaran akhir dari pada karakteristik suatu getaran. Phase adalah perubahan posisi pada bagian-bagian yang bergetar secara relatif untuk menentukan titik referensi atau titik awal pada bagian yang lain yang bergetar.
4
2.2 Karakteristik Getaran
Kondisi suatu mesin dan masalah-masalah mekanik yang terjadi dapat diketahui dengan mengukur karakteristik getaran pada mesin tersebut. Karakteristik-karakteristik getaran yang penting antara lain adalah :
a. Frekuensi getaran
Gerakan periodic atau getaran selalau berhubungan dengan frekuensi yang menyatakan banyaknya gerakan bolak-balik ( satu siklus penuh ) tiap satuan waktu. Hubungan antara frekuensi dan periode suatu getaran dapat dinyatakan dengan rumus sederhana :
Frekuensi = 1 / periode
Frekuensi dari getaran tersebut biasanya dinyatakan sebagai jumlah siklus getaran yang terjadi tiap menit ( CPM = Cycles per Minute). Sebagai contoh sebuah mesin bergetar 60 kali ( siklus dalam 1 menit maka frekuensi getaran mesin tersebut adalah 60 CPM ).
b. Perpindahan getaran (vibration displacement)
Jarak yang ditempuh dari suatu puncak ke puncak yang lainnya disebut dengan perpindahan dari puncak ke puncak atau yang disebut dengan peak to peak
displacement. Perpindahan tersebut pada umunya
dnyatakan dalam satuan micron ( μm ) atau mils. 1 μm = 0,001 mm
I mils = 0,001 inch
c. Kecepatan getaran (vibration velocity)
Kerena getaran merupakan suatu gerakan, maka getaran tersebut pasti mempunyai kecepatan. Kecepatan getaran ini biasanya dalam satuan mm/det (peak). Karena kecepatan ini selalu berubah secara sinusoida, maka seringkali digunakan pula satuan mm/sec (rms). Nilai
peak = 1,414 x nilai rms. Kadang-kadang digunakan juga
satuan inch/sec (peak) atau inc/sec ( rms ) 1 inch = 25,4 mm
d. Percepatan getaran (vibration acceleration) e. Phase getaran
5
Dengan mengacu pada gerakan pegas, dapat mempelajari karakteristik suatu getaran dengan memetakan gerakan dari pegas tersebut terhadap fungsi waktu.
Gambar 2.1 Karakteristik dari Getaran [1] 2.3 Jenis Kerusakan Pada Pompa
Pompa adalah alat yang digunakan untuk memindahkan suatu fluida dari suatu tempat ke tempat lain dengan cara menaikkan tekanan cairan tersebut. Standart pompa sesuai dengan API 610, ISO 5199, DIN 24256 (www.truflo.com). Masing-masing komponen pompa mempunyai frekuensi komponen yang akan memepengaruhi hasil getaran yang diakibatkannya, yang perlu diperhatikan pada pompa sentirifugal NS-50 adalah 1 x rpm pompa yaitu rpm pompa dibagi 60 yang disebut frekuensi pompa, 1 x rpm motor yaitu rpm motor diagi 60 yang disebut frekuensi motor listrik dan frekuensi sudut yang diperoleh dari mengalikan jumlah sudut impeler dengan rpm pompa yang selanjutnya dibagi 60. [2]
Frekuensi pompa (Hz) =
Frekuensi sudut (Hz) =
Jenis kerusakan pada pompa pada umumnya yaitu : a. Unbalance
Unbalance adalah kondisi di mana pusat massa tidak
6
vibrasi terhadap bearing yang menghasilkan gaya sentrifugal. Ada beberapa faktor yang menyebabkan terjadinya unbalance yakni kesalahan saat proses pemesinan dan assembly, eksentrisitas komponen, adanya kotoran saat pengecoran, korosi dan keausan, distorsi geometri karena beban termal dan beban mekanik, serta penumpukan material. Karakteristik dari unbalance ini dapat diketehui dengan adanya amplitudo yang tinggi pada 1xRPM, tetapi adanya amplitudo pada 1xRPM tidak selalu unbalance, tanda lainnya adalah rasio amplitudo antara pengukuran arah horizontal dan vertikal kecil (H/V<3). Ketika pada kondisi dominan unbalance, maka getaran radial (Horizontal dan Vertikal) akan secara normal jauh lebih tinggi dibandingkan
axial. Pada pompa normal, getaran horizontal lebih tinggi
dari vertikal. Amplitudo di 1x RPM secara normal ≥80% dari amplitudo keseluruhan ketika masalah dipastikan unbalance.
Gambar 2.2 Spektrum Vibrasi Unbalance [3] b. Misalingment
Ketidaklurusan (misalignment) terjadi ketika frekuensi
shaft yang berputar satu kali putaran atau dapat juga terjadi
dua dan tiga kali putaran. Normalnya disebabkan adanya getaran yang tinggi pada axial dan radial, tetapi tidak selalu tinggi pada axial saja, khususnya saat kondisi parallel offset lebih mendominasi dibandingkan angular misalignment. Menghasilkan getaran lebih besar dari keadaan normal di 2xRPM di mana dapat terjadi bukan hanya di arah axial tapi juga di radial. Jika misalignment menjadi semakin buruk hal ini dapat disebabkan besarnya nilai harmonik di mana akan
7
menghasilkan spektrum nampak seperti masalah looseness. Untuk misalignment parah, pengukuran radial (horizontal dan
vertikal) perbedaan fase terdapat pada 0˚ atau 180˚ (±30˚)
antara sisi dalam dan sisi luar bearing. Kebanyakan dari waktu, perbedaan fase horizontal mendekati 180˚ pergeseran fase dibandingkan dengan perbedaan fase vertikal. Misalignment yang terjadi pada mesin berputar yaitu:
Angular Misaligment
Getaran axial tinggi, terutama pada 1x, 2x, dan 3x RPM, satu dari puncak ini (peak) kadang-kadang lebih dominan daripada yang lain. Umumnya amplitudo antara 2x atau 3x RPM mencapai kir-kira 30– 50% dari 1xRPM di arah axial. Indikasi terbaik adalah perbedaan fase 180˚ bersebrangan kopling di arah axial. Dari kerusakan ini kemungkinan juga mengindikasikan adanya masalah kopling. Angular misalignment kemungkinan terdapat pada 1x RPM harmonik, seperti juga mechanical
looseness (kelonggaran mekanik) gerakan harmonik
ganda ini tidak selalu mengeluarkan suara gaduh pada spektra.
Gambar 2.3 Angular Misalignment [3]
Parallel Misalignment
Shaft pada paralel misalignment terlihat offset. Misalignment ini mempunyai kesamaan gejala pada
getaran angular, tetapi menunjukan tingginya getaran
radial di mana mencapai fase 180˚ berseberangan dengan
kopling, amplitudo di 2xRPM lebih besar daripada di 1x. Amplitudo tidak selalu berada pada 1x, 2x, atau 3x yang
8
lebih dominan, tetapi ketinggian relative di 1x di mana selalu diindikasi pada tipe kopling dan konstruksi. Ketika kedua arah angular dan arah radial menjadi semakin tinggi, keduanya dapat menciptakan tingginya peak amplitudo jauh lebih tinggi dari harmoninya (4x-8x) atau ketika rangkaian frekuensi harmonik tinggi serupa dengan
mechanical looseness. Tipe kopling dan material akan
membawa pengaruh yang besar pada spektrum ketika gejala misalignment ada, hal ini tidak ada pengaruh pada peningkatan suara gaduh.
Gambar 2.4 Parallel Misalignment [3]
Bearing Misalignment
Untuk kerusakan ini getaran axial terjadi pada 1x dan 2x RPM, fase axial terjadi di empat bagian dengan sudut 90˚ satu sama lain juga akan terjadi pergeseran sudut 90 dari
point ke point selanjutnya. Untuk meluruskan kopling
atau membalance rotor tidak akan memecahkan masalah, cara yang paling efektif adalah bearing harus diganti dan pasang bearing yang tepat (diameter inner bearing harus simetris). Titik 1, 2, 3, dan 4 merupakan pengukuran
axial , titik tersebut harus 90˚ terpisah satu sama lain.
9
c. Kerusakan bearing
Kerusakan bearing (defective antifriction bearing)
mempunyai ciri yaitu mempunyai puncak (peak) tinggi beberapa kali RPM, 1x, 2x, 3x, 4x, . . . . ., 10x. Vibrasi akan timbul jika bearing sudah parah. Pada spektrum akan tampak impact (tubrukan) beberapa frekuensi dengan amplitudo tinggi.
Gambar 2.6 Spektrum Kerusakan Bearing [3] d. Loseness
Tidak rapat (mechanical looseness) terjadi pada frekuensi dua kali putaran, penyebabnya terjadi karena perubahan keseimbangan dan alignment. Biasanya terjadi pada arah
axial dan kejadiannya sering bersamaan dengan unbalance
dan misalignment. Karakteristik loosness dapat diketahui pada spektrum dengan adanya beberapa amplitudo tinggi khususnya pada 1x RPM, 1,5x RPM, dan harmonik.
Looseness biasanya disebabkan oleh structural looseness
dari tumpuan mesin, pondasi, baut yang kendor, dan
deteriorated grouting. [2]
10
Tabel 2.1 Jenis Kerusakan Sistem Berdasarkan Spektrum Frekuensi [4]
2.4 Analisa Vibrasi dengan FFT
Analisa fourier terbagi atas dua yakni deret fourier untuk sinyal periodik dan trasformasi fourier untuk sinyal aperiodik. Setiap sinyal periodik dapat dinyatakan oleh jumlahan atas komponen-komponen sinyal sinusoidal dengan frekuensi berbeda (distinct). Jika ada sebuah fungsi f(t) yang kontinyu periodik dengan periode T, bernilai tunggal terbatas dalam suatu interval terbatas, memiliki diskontinyuitas yang terbatas jumlahnya dalam interval tersebut dan dapat diintegralkan secara mutlak, maka f(t) dapat dinyatakan dengan deret fourier. Dengan menggunakan
software komputer, komputasi FFT menjadi lebih mudah dan
cepat. Contoh sederhana FFT pada matlab sebuah fungsi f(t) dari
time domain menjadi frequency domain
FFT merupakan elemen pemrosesan sinyal pada pengukuran vibrasi. Pada pengukuran vibrasi ada empat tahapan untuk merubah sinyal vibrasi menjadi spektrumnya. Algoritma FFT untuk analisa vibrasi tersebut adalah sebagai berikut:
1. Pengambilan data vibrasi dari tranduser yang dihubungkan dengan sistem akuisisi.
2. Sistem akuisisi menghasilkan spektrum yang menunjukkan perbandingan waktu dengan percepatan. 3. Hasil spektrum diolah menggunakan software lain
11
4. Hasil pengolahan menggunakan FFT akan berupa grafik perbandingan frekuensi dengan amplitudo yang menunjukkan jenis kerusakan dan tingkat kerusakan mesin.
Gambar 2.8 Hasil FFT dari Data Vibrasi[3]
Ada beberapa parameter pemrosesan sinyal pada FFT yang perlu diketahui untuk menjamin kesuksesan analisa vibrasi. Dengan mengetahui parameter-parameter tersebut pengambilan data bisa lebih cepat dan akurat. Parameter-parameter FFT tersebut adalah sebagai berikut:
a. Fmax: Frekuensi maksimum atau frequency range menunjukkan bandwith frekuensi yangakan ditampilkan pada spektrum.
b. Number & Tipe of Averages: Karena vibrasi tidak bisa lepas dari gangguan/random noise, maka diperlukan beberapa kali pengambilan data dan kemudian merata-ratakannya. Number of averages menyatakan berapa kali data diambil.
c. Number of Lines: Parameter ini mendefinisikan jumlah resolusi garis untuk perhitungan FFT. Resolusi frekuensi menentukan seberapa dekat dua puncak frekuensi dibedakan sebagai puncak yang terpisah. Ketika frekuensi maksimum semakin tinggi, jumlah resolusi garis juga harus bertambah supaya menjaga resolusi tetap sama. 2.5 Pengambilan Data Menggunakan Accelerometer
Tranduser getaran dipasang pada bagian-bagian mesin yang cukup kaku untuk menghindari efek resonansi lokal bagian
12
tersebut. Pengambilan data-data dengan alat tranduser tersebut harus terlebih dahulu mengetahui bagianmana dari mesin tersebut yang paling tepat untuk pengukuran vibrasi. Tempat yang paling tepat tersebut adalah pada tempat yang dekat dengan sumber vibrasi, misalnya pada kerusakan bearing maka penempatan tranduser diletakkan pada bearing caps (rumah bearing). Pengambilan data vibrasi dilakukan dengan dua posisi yaitu dengan posisi axial dan posisi radial. Pengambilan data secara
axial adalah menempatkan alat tranduser pada arah axial atau
searah dengan poros. Cara radial sendiri terbagi menjadi 2 cara, yaitu:
1. Horizontal: pengukuran secara horizontal dengan cara meletakkan alat tranduser secara horizontal misalnya pada bagian atas pompa. Dari pengukuran ini dapat diketahui amplitudo yang paling tinggi.
2. Vertikal: pengambilan data secara vertikal adalah dengan menempatkan alat tranduser pada posisi vertikal atau berbanding 90˚ dengan arah horizontal pada pompa. Pengambilan data pada tiga sumbu berfungsi untuk melihat kondisi vibrasi pada masing-masing sumbu, karena di setiap sumbu mempunyai vibrasi yang berbeda. Pada setiap kondisi mesin dapat ditentukan karakteristik kerusakan dengan melihat sinyal vibrasi dari masing-masing sumbu pengukuran. [3]
2.6 Stroboscope
Stroboscope merupakan salah satu alat yang lebih canggih
dan aman untuk mengukur kecepatan dengan cara tanpa kontak.
Stroboscope menggunakan sumber sinar cahaya yang dapat
disinkronisasi dengan setiap kecepatan dan pengulangan gerakan sehingga benda yang berpindah sangat cepat terlihat tidak bergerak atau berpindah perlahan.[5]
13 BAB III
METODOLOGI PERCOBAAN 3.1 Peralatan
Adapun peralatan yang digunakan dalam praktikum, antara lain :
a. 3 buah pompa air.
b. Laptop dengan Software Sound and Vibration Assistant dan MatLab.
c. DAQ National Instrument.
d. Stroboscope. e. Accelerometer.
3.2 Prosedur Percobaan
Adapun langkah-langkah yang dilakukan pada percobaan, antara lain :
a. Accelerometer disambungkan ke DAQ.
b. Accelerometer ditempelkan pada mesin pompa 1 yang akan diukur. Dengan 2 tipe posisi, yaitu axial dan radial (horizontal dan vertikal).
c. Data diambil dari DAQ.
d. Langkah 1s/d 3 diulangi dengan mengganti pompa air 2 dan 3.
e. Buat grafik perbandingan hasil monitoring vibrasi dari tiap pompa dengan menggunakan FFT pada program MatLab.
14
15 BAB IV
ANALISIS DATA DAN PEMBAHASAN 4.1 Analisis Data
Berikut adalah data dari hasil percobaan pada Pompa 1,2, dan 3 dengan masing-masing posisi axial dan radial (vertikal dan horizontal), yaitu :
a. Pompa 1
Adapun hasil dari analisis pompa 1, yaitu :
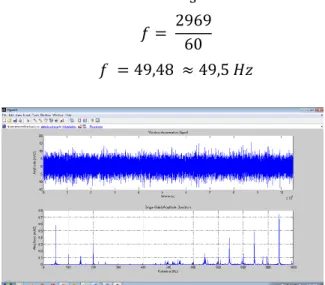
Pompa 1 = 2969 RPM, maka dirubah dalam bentuk frekuensi (Hz) adalah
Gambar 4.1 Pompa 1 Posisi Axial
- Gambar 4.1, menyatakan jenis kerusakan pompa
unbalance, karena frekuensi acuan sebesar 49,5 Hz,
maka grafik tersebut menunjukkan tinggi amplitudo terbesar pada 1xRPM. Mekaniknya disebabkan oleh tidak seimbang pada titik pusat putarannya.
16
Gambar 4.2 Pompa 1 Posisi Horizontal
- Gambar 4.2, menyatakan jenis kerusakan pompa
unbalance, karena frekuensi acuan sebesar 49,5 Hz,
maka grafik tersebut menunjukkan tinggi amplitudo terbesar pada 1xRPM. Mekaniknya disebabkan oleh tidak seimbang pada titik pusat putarannya.
Gambar 4.3 Pompa 1 Posisi Vertikal
- Gambar 4.3, menyatakan jenis kerusakan pompa
paralell misalignment, karena frekuensi acuan
sebesar 49,5 Hz, maka grafik tersebut menunjukkan besar 1xRPM, 2x RPM (besar amplitudo tinggi daripada 1xRPM). Mekaniknya disebabkan oleh kebengkokan pada mesin yang berputar.
17
b. Pompa 2
Adapun hasil dari analisis dari pompa 2, yaitu :
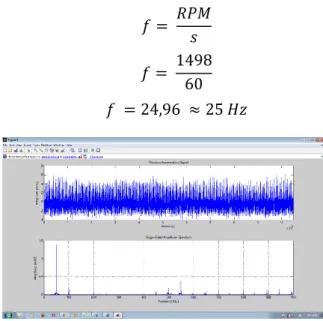
Pompa 2 = 1498 RPM, maka dirubah dalam bentuk frekuensi (Hz) adalah
Gambar 4.4 Pompa 2 Posisi Axial
- Gambar 4.4, menyatakan jenis kerusakan pompa
unbalance, karena frekuensi acuan sebesar 25 Hz,
maka grafik tersebut menunjukkan tinggi amplitudo terbesar pada 1xRPM. Mekaniknya disebabkan oleh tidak seimbangnya pada titik pusat putarannya.
18
Gambar 4.5 Pompa 2 Posisi Horizontal
- Gambar 4.5, menyatakan jenis kerusakan pompa
unbalance, karena frekuensi acuan sebesar 25 Hz,
maka grafik tersebut menunjukkan tinggi amplitudo terbesar pada 1xRPM. Mekaniknya disebabkan oleh tidak seimbang pada titik pusat putarannya.
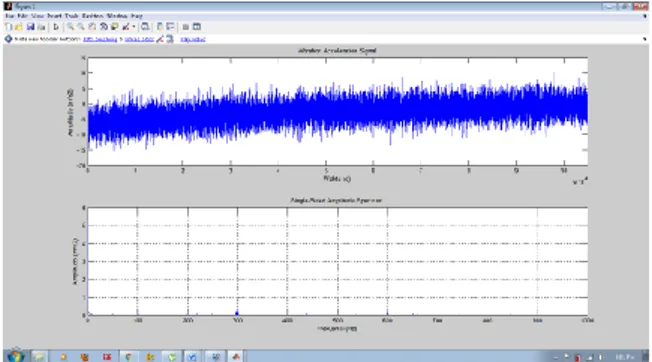
Gambar 4.6 Pompa 2 Posisi Vertikal
- Gambar 4.6, menyatakan jenis kerusakan pompa
angular misalignment, karena frekuensi acuan
sebesar 25 Hz, maka grafik tersebut menunjukkan besar 2xRPM dan 3x RPM memiliki besar amplitudo tinggi daripada 1xRPM. Mekaniknya disebabkan oleh ketidaklurusan pada mesin yang berputar.
19
c. Pompa 3
Adapun analisis dari pompa 3, yaitu :
Pompa 3 = 1507 RPM, maka dirubah dalam bentuk frekuensi (Hz) adalah
Gambar 4.7 Pompa 3 Posisi Axial
- Gambar 4.7, menyatakan jenis kerusakan pompa
unbalance, karena pada grafik tersebut menunjukkan
tinggi amplitudo terbesar pada 1xRPM. Mekaniknya disebabkan oleh tidak seimbang pada titik pusat putarannya.
20
Gambar 4.8 Pompa 2 Posisi Horizontal
- Gambar 4.8, menyatakan jenis kerusakan pompa
unbalance, karena pada grafik tersebut menunjukkan
tinggi amplitudo terbesar pada 1xRPM. Mekaniknya disebabkan oleh tidak seimbang pada titik pusat putarannya.
Gambar 4.9 Pompa 3 Posisi Vertikal
- Gambar 4.9, menyatakan jenis kerusakan pompa
unbalance, karena pada grafik tersebut menunjukkan
tinggi amplitudo terbesar pada 1xRPM. Mekaniknya disebabkan oleh tidak seimbang pada titik pusat putarannya.
21
4.2 Pembahasan
Dalam pratikum P1 tentang vibrasi dan jenis kerusakan pada pompa mendapatkan hasil data yang dianalisis pada ketiga pompa tersebut (hasil pada stroboscope) menggunakan rumus kecepatan sudut yaitu :
Sehingga didapatkan frekuensi dari ketiga pompa dengan menggunakan rumus :
Dari hasil perhitungan frekuensi diatas didapatkan hasil pada pompa 1 sebesar 50 Hz, pompa 2 sebesar 25, dan pompa 3 sebesar 25,1 Hz , hasil frekuensi tersebut dijadikan sebagai acuan untuk dibandingkan dengan grafik domain frekuensi (pada matlab). Dari analisis data pada domain frekuensi (pada matlab) menghasilkan bahwa pompa 1, 2 (baik axial maupun horizontal) dan pompa 3 merupakan jenis kerusakan pompa unbalance karena
grafik tersebut menunjukkan bahwa tinggi amplitudo
terbesar pada 1xRPM yang kerusakan mekaniknya
disebabkan oleh tidak seimbangnya pada titik pusat putaran.
Pompa 1 pada posisi vertikal, jenis kerusakan pompanya
paralell misalignment, karena frekuensi acuan sebesar 49,5
50 Hz, maka grafik tersebut menunjukkan besar 1xRPM,
2x RPM (besar amplitudo tinggi daripada 1xRPM) serta
kerusakan mekaniknya disebabkan oleh kebengkokan pada
mesin putarnya. Dan pompa 2 pada posisi vertikal
merupakan jenis kerusakan pompa angular misalignment,
maka grafik tersebut menunjukkan besar 2xRPM dan 3x
RPM memiliki besar amplitudo tinggi daripada 1xRPM dan
kerusakan mekaniknya disebabkan oleh ketidaklurusan pada
mesin putarnya.
22
23 BAB V PENUTUP 5.1 Kesimpulan
Adapun kesimpulan yang dapat diambil, yaitu :
1. Kerusakan pada pompa dapat dianalisis dengan
accelerometer dengan peletakan sensor secara axial dan
radial (horizontal dan vertikal). Stoboscope merupakan alat penghitung putaran pompa, dimana putaran pompa seolah berhenti berputar. Untuk nmengetahui frekuensi dari pompa dilihat dari hasil putaran pada nilai
stroboscope yang kemudian akan dijadikan sebagai
frekuensi acuan (bandingkan dengan frekuensi yang terdapat pada matlab).
2. Data pada domain frekuensi menghasilkan bahwa pompa 1, 2 (baik axial maupun horizontal) dan pompa 3 merupakan jenis kerusakan pompa unbalance karena
grafik
tersebut
menunjukkan
bahwa
tinggi
amplitudo terbesar pada 1xRPM yang kerusakan
mekaniknya disebabkan oleh tidak seimbangnya
pada titik pusat putaran. Pompa 1 pada posisi
vertikal, jenis kerusakan pompanya paralell
misalignment, karena frekuensi acuan sebesar 49,5
50 Hz, maka grafik tersebut menunjukkan besar
1xRPM, 2x RPM (besar amplitudo tinggi daripada
1xRPM) serta kerusakan mekaniknya disebabkan
oleh kebengkokan pada mesin putarnya. Dan pompa
2 pada posisi vertikal merupakan jenis kerusakan
pompa angular misalignment, maka grafik tersebut
menunjukkan besar 2xRPM dan 3x RPM memiliki
besar amplitudo tinggi daripada 1xRPM dan
kerusakan mekanik disebabkan oleh ketidaklurusan
pada mesin putarnya.
24
5.2 Saran
Adapun saran yang diberikan selama praktikum, yaitu : 1. Praktikan sebaiknya lebih bersungguh-sungguh dalam
menjalankan praktikum dengan membaca modul maupun prosedur praktikum agar proses praktikum berjalan lancar.
DAFTAR PUSTAKA
[1] Hanifa, Nadya. 2012. Makalah Vibrasi. Jakarta : UIN Syarif Hidayatullah
[2] Any, Aritya. 2013. Deteksi Kerusakan Impeler Pompa
Sentrifugal Dengan Analisa Sinyal Getaran. Solo :
Universitas Sebelas Maret
[3] Anonim. 2015. Modul P1 Vibrasi. Surabaya : Laboratorium Vibrastic- Jurusan Teknik Fisika- ITS Surabaya
[4] Viewer Software – Review Diagnostic Results, Fluke 810 Vibration Tester, 2010
[5] Susanto, Agus. 2008. Sensor Kecepatan. Bengkulu : Universitas Bengkulu
![Gambar 2.1 Karakteristik dari Getaran [1]](https://thumb-ap.123doks.com/thumbv2/123dok/2249269.3560071/21.629.250.436.182.331/gambar-karakteristik-dari-getaran.webp)
![Gambar 2.2 Spektrum Vibrasi Unbalance [3]](https://thumb-ap.123doks.com/thumbv2/123dok/2249269.3560071/22.629.90.520.431.550/gambar-spektrum-vibrasi-unbalance.webp)
![Gambar 2.3 Angular Misalignment [3]](https://thumb-ap.123doks.com/thumbv2/123dok/2249269.3560071/23.629.217.434.505.635/gambar-angular-misalignment.webp)
![Gambar 2.4 Parallel Misalignment [3]](https://thumb-ap.123doks.com/thumbv2/123dok/2249269.3560071/24.629.205.466.318.421/gambar-parallel-misalignment.webp)
![Gambar 2.7 Spektrum Vibrasi Looseness [3]](https://thumb-ap.123doks.com/thumbv2/123dok/2249269.3560071/25.629.259.446.667.784/gambar-spektrum-vibrasi-looseness.webp)
![Tabel 2.1 Jenis Kerusakan Sistem Berdasarkan Spektrum Frekuensi [4]](https://thumb-ap.123doks.com/thumbv2/123dok/2249269.3560071/26.629.130.474.144.332/tabel-jenis-kerusakan-sistem-berdasarkan-spektrum-frekuensi.webp)
![Gambar 2.8 Hasil FFT dari Data Vibrasi [3]](https://thumb-ap.123doks.com/thumbv2/123dok/2249269.3560071/27.629.238.427.195.330/gambar-hasil-fft-dari-data-vibrasi.webp)