DESAIN PENGENDALIAN KETINGGIAN AIR DAN TEMPERATUR UAP PADA SISTEM STEAM DRUM BOILER
DENGAN METODE SLIDING MODE CONTROL (SMC) Oleh :
Teguh Herlambang 1206 100 046
Dosen Pembimbing : Dr. Erna Apriliani, MSi Hendra Cordova, ST, MT
Jurusan Matematika
Fakultas Matematika dan Ilmu Pengetahuan Alam Institut Teknologi Sepuluh Nopember
Surabaya 2010
ABSTRAK
Pada suatu sistem pembangkit listrik tenaga uap (PLTU), yang memegang peranan penting adalah boiler. Steam drum Boiler merupakan sebuah drum yang berfungsi untuk memisahkan fluida antara fase gas dan fase cair. Keberadaannya dalam sebuah sistem boiler, memegang peranan yang sangat penting. Variabel yang dikendalikan dalam steam drum boiler adalah ketinggian air dan temperatur uap. Pada steam drum boiler memiliki model dinamika yang nonlinier dan memiliki banyak ketidakpastian (uncertainties). Permasalahan umum yang sering dihadapi sistem pengendali nonlinier adalah munculnya gangguan tak pasti yang berasal dari dalam maupun luar sistem serta parameter yang tidak konstan. Untuk memperbaiki performansi sistem, digunakan salah satu metode yang cukup banyak mendapat perhatian yaitu Sliding Mode Control (SMC). Pada Tugas Akhir ini, dirancang suatu sistem pengendali dengan menggunakan metode static dan dynamic SMC yang merupakan jenis metode pengendali yang ada pada SMC. Yang diterapkan pada sistem Steam Drum Boiler untuk mengganti sistem pengendali. SMC merupakan salah satu metode kontrol yang bersifat sangat robust, sehingga mampu bekerja dengan baik pada sistem yang mempunyai ketidakpastian model atau parameter.
Kata Kunci: Sliding Mode Control (SMC), steam drum boiler, ketinggian air, temperatur uap 1. Pendahuluan
Di Negara kita, memproduksi listrik dilakukan oleh bermacam-macam jenis instalasi pembangkit listrik yang rumit. Salah satunya adalah PLTU (Pembangkit Listrik Tenaga Uap). PLTU merupakan salah satu produsen penghasil listrik yang melayani kebutuhan listrik seluruh masyarakat yang diharapkan mampu bekerja secara optimal agar proses distribusi listrik tidak terhambat. Untuk menunjang keberhasilan tujuan tersebut tentu diperlukan komponen-komponen pendukung atau peralatan yang selalu bekerja dalam keadaan baik. Perubahan beban yang akan berpengaruh pada frekuensi sistem
dapat menyebabkan pengendali pada sistem pembangkit mengatur kembali besaran-besaran masukan guna mencapai titik keseimbangan yang baru sistem pembangkit listrik yang ada di PLTU [2].
Pada suatu sistem pembangkit listrik tenaga uap (PLTU), yang memegang peranan penting adalah boiler. Steam drum boiler merupakan sebuah tangki yang berfungsi untuk memisahkan fluida antara fase gas dan fase cair. Keberadaannya dalam sebuah sistem boiler, memegang peranan yang sangat penting. Variabel yang dikendalikan dalam steam drum boiler adalah ketinggian air dan temperatur uap. Pengukuran ketinggian air dan
temperatur uap pada steam drum boiler adalah hal yang sangat penting untuk safety dan efisiensi operasional dari boiler. Dapat dikatakan bahwa steam drum boiler adalah jantung dari sebuah boiler. Disinilah uap yang digunakan untuk memutar turbin pertama kali dihasilkan [2].
Salah satu metode yang dapat dilakukan akhir–akhir ini adalah Sliding Mode Control (SMC). SMC memiliki beberapa keunggulan, yaitu sifatnya yang sangat robust, mampu bekerja dengan baik pada sistem nonlinear yang memiliki ketidakpastian model ataupun parameter. Sehingga pada tugas akhir ini, dirancang desain pengendalian ketinggian air dan temperatur uap pada steam drum boiler dengan menggunakan jenis metode pengendali yang ada pada SMC yaitu static dan dynamic SMC.
2. Metode Penelitian
Metode yang digunakan pada tugas akhir dalam menyelesaikan permasalahan adalah :
1. kajian pustaka dan Analisis permasalahan 2. Mengkaji model matematika ketinggian air
dan temperatur uap pada steam drum boiler. 3. Perancangan desain pengendali SMC untuk
sistem Steam Drum Boiler.
4. Simulasi menggunakan software Matlab 7 5. Analisis performansi sistem yang
dikendalikan dengan SMC
6. Penyimpulan hasil analisis simulasi
3. Sistem Steam Drum Boiler
Steam drum merupakan tempat untuk menampung air dalam volume yang besar dan memisahkan antara uap dan air setelah pemanasan yang terjadi di dalam boiler. Pada pengendalian ketinggian air pada steam drum boiler ini, ketinggian air dipertahankan pada ketinggian NWL (normal water level) atau bisa juga disebut set point. Dan temperatur uap juga dipertahankan pada set point. Apabila terjadi suatu gangguan pada salah satu variabel tersebut maka proses akan terganggu. Sehingga model matematika dari steam drum boiler dibentuk oleh dua variabel yaitu ketinggian air dan temperatur uap.
Gambar 3.1 steam drum boiler
Model matematika dari gambar diatas adalah [8] :
in out
dh
A
F
F
dt
(3.1) in in pdT
Q
Ah
F
T
T
dt
C
(3.2) dimanaF
outkw h
Dimana :Fin : Flow air yang masuk (kg/jam) Fout : Flow air yang keluar (kg/jam) T : Temperatur uap (K)
Tin : temperatur air yang masuk (K) Q : Flow uap (kg/jam)
V : Volume air (m3)
A : Luas steam drum boiler (m2) h : Ketinggian Air (m)
: Massa jenis air (kg/m3)
Cp : kapasitas panas dalam steam drum (J/kg K)
w : control valve flow air (m)
k : koefisien control valve (m3/2/jam)
4. Sistem Pengendali
Secara umum, suatu sistem pengendalian dapat digambarkan sebagai berikut:
Gambar 4.1. Diagram blok sederhana dari sistem lup tertutup
Pada Gambar 4.1 r adalah reference point atau nilai yang diinginkan, d gangguan bagi sistem, e sinyal
error, u control input, y keluaran sistem, C sistem pengendali, dan P adalah plant.
4.1 Sliding Mode Control (SMC) Pandang suatu sistem dinamis [10] :
,
, .
n
x
t
f x t
b x t u d t
(4.1.1)dimana u control input, merupakan vektor keadaan,
f x t
,
danb x t
,
berupa fungsi terbatas,d t
gangguan eksternal. Jikax
d merupakanx
yang diinginkan, maka tracking error-nya dapat dinyatakan dengan :Fungsi Switching yaitu permukaan
S
(
x
,
t
)
di dalam ruang keadaan Rn, memenuhi persamaan [9] :e
dt
d
t
x
S
n 1)
,
(
(4.1.2)Untuk static sliding mode control menggunakan 1
( , )
nd
S x t
e
dt
sedangkan untukdynamic sliding mode control menggunakan 1 1
( , )
nd
S x t
e
dt
Dengan λ berupa konstanta positif. Dimana fungsi switching ini digunakan untuk menentukan besarnya nilai u agar memenuhi kondisi sliding.
Permukaan sliding (sliding surface) merupakan persamaan yang memenuhi:
0
)
,
(
x
t
S
(4.1.3)Besar nilai control input pada SMC bergantung pada nilai S, sehingga memenuhi pertidaksamaan yang disebut kondisi sliding. Kondisi tersebut ditulis dalam bentuk sebagai berikut :
SS
S
(4.1.4)Untuk suatu η konstanta positif. Sliding mode berarti bahwa sekali trayektori keadaan e mencapai permukaan sliding, maka trayektori sistem akan bertahan di sana sambil meluncur ke
titik asal bidang
e
e
secara independen dengan semua ketidakpastian.5 Perancangan Pengendali Sliding Mode Control
5.1 Perancangan Pengendali Static Sliding Mode Control
5.1.1 Rancangan Sistem Pengendali ketinggian air pada Steam Drum Boiler
Pemodelan matematika pada steam drum boiler yang mengacu dari persamaan (3.1) dan (3.2) maka diperoleh : in
F
kw h
h
A
A
(5.1)1
in in pQ
T
F
T
T
Ah
C
(5.2) Misal 1 2 inF
a
b
A
dan 1k
b
A
2 in inF T
a
A
dan1
pc
A C
Maka dapat dituliskan :1 1
h
a
b w h
(5.3) 2 21
T
a
b T
cQ
h
(5.4)Tracking error dari ketinggian air adalah :
d
h
h h
h
d=konstanKarena sistem berorde 1 maka dibentuk fungsi switching sebagai berikut :
,
dS h t
h h
Sedangkan turunan dari S adalah :
,
dS h t
h
h h
(5.5)Karena
h
d=konstan makah
d0
Dengan mensubstitusikan persamaan (5.3) ke (5.5), menjadi :
1 1
,
S h t
a
b w h
(5.6)Selanjutnya ditentukan nilai
w
dari persamaan (5.6) dengan nilaiS
0
, 1 10
a
b w h
)
(
)
(
)
(
t
x
t
x
t
e
dSehingga didapat
w
adalah 1 1a
w
b
h
(5.7)Berdasarkan control law yang memenuhi kondisi sliding adalah : 1 1
sgn( )
a
w
K
S
b
h
(5.8)Kemudian dengan mensubstitusikan persamaan (5.8) ke (5.6), diperoleh : 1 1 1 1
,
a
sgn( )
S h t
a
b
K
S
h
b
h
(5.9) Nilai K pada persamaan (5.9) harus dirancang agar memenuhi persamaan (4.14), diperoleh bahwa nilai K adalah :1
max
K
b
h
(5.10)Untuk meminimalkan chattering pada persamaan digunakan boundary layer dengan
( )
S
w
w K sat
(5.11) 1 1 1max
( )
a
S
w
sat
b
h
b
h
5.1.2 Rancangan Sistem Pengendali Temperatur Uap pada Steam Drum Boiler
Tracking error dari temperatur uap adalah :
d
T
T
T
T
d=konstanKarena sistem berorde 1 maka dibentuk fungsi switching sebagai berikut
,
dS T t
T T
Sedangkan turunan dari S adalah:
2 2
1
,
S T t
a
b T
cQ
h
(5.12)Selanjutnya ditentukan nilai
Q
dari persamaan (5.12) dengan nilaiS
0
, 2 21
0
a
b T
cQ
h
Sehingga didapat
Q
adalah 2 2a
b T
Q
c
(5.13)Berdasarkan control law yang memenuhi kondisi sliding adalah : 2 2
sgn( )
a
b T
Q
K
S
c
(5.14)Dengan mensubstitusikan persamaan (5.14) ke (5.12), diperoleh
sgn( )
,
cK
S
S T t
h
(5.15)Nilai K pada persamaan (5.15) harus dirancang agar memenuhi persamaan (4.14), diperoleh bahwa nilai K adalah
max
h
K
c
(5.16)Untuk meminimalkan chattering pada persamaan (5.15) digunakan boundary layer dengan mengubah fungsi signum (sgn) diubah menjadi fungsi saturasi (sat) sebagai berikut :
( )
S
Q
Q
K sat
(5.17) 2 2max
( )
a
b T
h
S
Q
sat
c
c
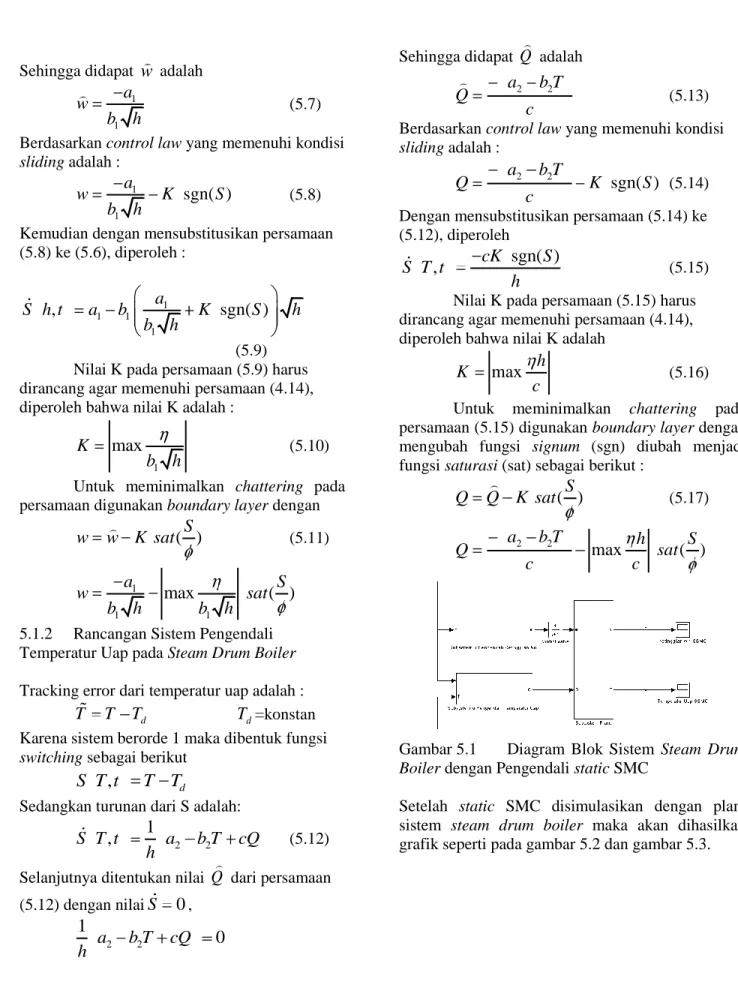
Gambar 5.1 Diagram Blok Sistem Steam Drum Boiler dengan Pengendali static SMC
Setelah static SMC disimulasikan dengan plant sistem steam drum boiler maka akan dihasilkan grafik seperti pada gambar 5.2 dan gambar 5.3.
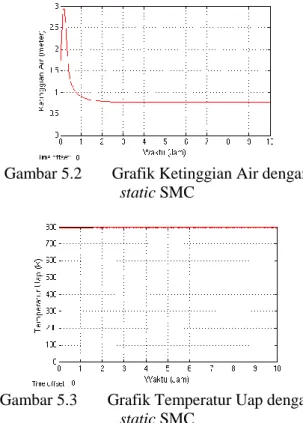
Gambar 5.2 Grafik Ketinggian Air dengan static SMC
Gambar 5.3 Grafik Temperatur Uap dengan static SMC
Pada gambar 5.2 tampak bahwa pada saat pemasukan awal, ketinggian air langsung naik sampai 2.95 m pada saat jam ke-0,17 kemudian static SMC pada ketinggian air mengendalikan control valve untuk sedikit ditutup maka air akan turun dan menuju ke posisi ketinggian air yang diinginkan dan stabil pada disekitar 0.7623 m. Pada gambar 5.3 terlihat bahwa pemasukan awal, temperatur uap langsung langsung naik menuju ke posisi yang diinginkan tetapi masih terjadi error dan terjadi disekitar 796.5 K
5.2 Perancangan Pengendali Dynamic Sliding Mode Control
5.2.1 Rancangan Sistem Pengendali Ketinggian Air pada Steam Drum Boiler Pada perancangan system pengendali ini tidak jauh beda dengan rancangan system pengendali sebelumnya. Hanya pada Dynamic Sliding Mode Control menaikkan satu orde menjadi orde 2, sehingga dibentuk fungsi switching sebagai berikut :
d
S
h
h h
Dengan cara yang sama pada static SMC maka didapatkan : 1 1 1 1 1 1 2 2 max ( ) 1 2 1 2 1 2 1 2 a h a a h S w a sat b h b h h h dengan 1 1 1 1 2 2 max 1 2 1 2 1 2 a a h h K a b h h h Dan 1 1
2
1 2
a
h
w
b
h
5.2.2 Rancangan Sistem Pengendali Temperatur Uap pada Steam Drum Boiler
Pada perancangan system pengendali ini tidak jauh beda dengan rancangan system pengendali sebelumnya. Hanya pada Dynamic Sliding Mode Control menaikkan satu orde menjadi orde 2, sehingga dibentuk fungsi switching sebagai berikut :
d
S
T
T T
Dengan cara yang sama pada static SMC maka didapatkan : 1 2 2 3 4 4 3 2 2 3 4 max ( ) z h h a b T z z cQ z h S Q z Q sat c c hh a b T z z cQ h dengan 1 2 3 4 2 3 4 max h + K z h h z z z cQ z z z cQ h c hh dan
Q
z
3z
4Q
c
Denganz
1b T
2cQ
2 2 2z
a
b T
;z
3h
h
h
2 2 4 2 2 2h a
b T
z
b T
a
b T
h
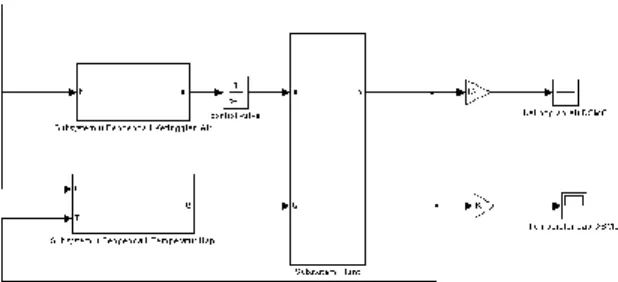
Setelah rancangan sistem pengendali dynamic SMC diperoleh, selanjutnya disimulasikan pada simulink Matlab. Sistem pengendali ini dirangkai dalam bentuk diagram blok pada system steam drum boiler yang berupa lup tertutup. Maka akan ditampilkan simulasi ketinggian air dan temperatur uap pada sistem steam drum boiler sebagai berikut :
Gambar 5.4 Diagram Blok Sistem Steam Drum Boiler dengan Pengendali dynamic SMC Pada gambar 5.4 terlihat bahwa dalam diagram blok sistem steam drum boiler dengan pengendali dynamic SMC seperti pada gambar 5.4 dan subsistem dynamic SMC yang terdiri dari dynamic SMC ketinggian air dan dynamic SMC temperatur uap.
Setelah dynamic SMC disimulasikan dengan plant sistem steam drum boiler maka akan dihasilkan grafik seperti pada gambar 5.5 dan gambar 5.6.
Gambar 5.5 Grafik Ketinggian Air dengan dynamic SMC
Gambar 5.6 Grafik Temperatur Uap dengan dynamic SMC
Pada gambar 5.5 tampak bahwa dengan dynamic SMC, ketinggian air stabil disekitar 0,7622 m pada saat jam ke-2,5. Tejadi overshoot ke atas di 1,09 m pada saat jam ke-0,4 dan terjadi overshoot kebawah di 0,55 m pada saat jam ke-1,2. Pada 5.6 tampak bahwa dengan dynamic SMC, temperatur uap stabil disekitar 786 K pada jam ke-0,2.
Pada gambar 5.5 terlihat bahwa pada saat pemasukan awal ktinggian air langsung naik sampai 1.09 m kemudian dynamic SMC pada pada ketinggian air mengendalikan control valve untuk sedikit menutup namun ketinggian air menurun sampai 0.55 m dan dynamic SMC mengendalikan kembali control valve sehingga ketinggian air stabil di posisi yang diinginkan disekitar 0.762 m. Pada gambar 5.6 terlihat bahwa pemasukan awal, temperatur uap langsung langsung naik menuju ke posisi yang diinginkan disekitar 786 K.
Dari hasil static SMC dan dynamic SMC maka perlu dicoba dengan gangguan untuk mengetahui kelebihan dan kekurangan dari static SMC dan dynamic SMC
6. Simulasi dan Analisis Hasil Rancangan Pengendali.
Dari hasil rancangan pada subbab 5.1 dan 5.2, pada subbab ini akan dilakukan dua macam simulasi yaitu simulasi dengan gangguan eksternal dan simulasi dengan gangguan iinternal.
6.1 Simulasi dengan Gangguan Eksternal Simulasi ini dilakukan dengan menambahkan suatu sinyal yang dianggap sebagai gangguan yang berasal dari luar sistem. Dalam simulasi ini akan digunakan fungsi sinus. fungsi sinus sebagai representasi gangguan control valve. Nilai awal yang digunakan adalah flow air yang masuk Fin=386,54 , temperatur air yang masuk Tin=796, kapsitas panas pada steam drum boiler Cp=79,676 dan koefisien control valve k=1. dan posisi ketinggian air dan temperatur uap yang diinginkan adalah 0,7625 m dan 786 K.
1. Uji dengan gangguan berupa sinyal fungsi sinus
Sinyal fungsi sinus sebagai representasi gangguan control valve. Pada simulasi ini diberikan dua macam sinyal square, yaitu bernilai kecil (Amplitudo 1) dan bernilai besar (Amplitudo 5).
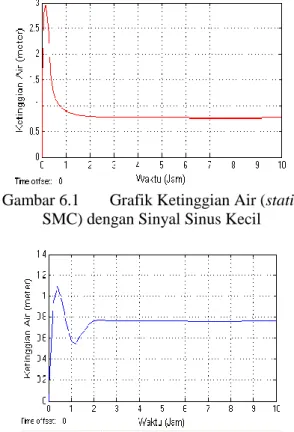
Hasil yang diperoleh untuk gangguan eksternal berupa sinyal fungsi sinus kecil adalah terlihat pada gambar 6.1 bahwa dengan SSMC, ketinggian air stabil disekitar 0,7635 m pada saat jam ke-3 namun masih terdapat osilasi. Terjadi overshoot keatas disekitar 2,95 m pada saat jam ke-0,18. Pada gambar 6.2 tampak bahwa dengan DSMC terlihat bahwa ketinggian air stabil disekitar 0,7646 m pada saat jam ke-2,5 dan mengalami overshoot keatas disekitar 1,09 m pada saat jam ke-0,4 dan overshoot kebawah disekitar 0,55 m pada saat jam ke-1,2.
Gambar 6.1 Grafik Ketinggian Air (static SMC) dengan Sinyal Sinus Kecil
Gambar 6.2 Grafik Ketinggian Air (dynamic SMC) dengan Sinyal Sinus Kecil
Pada gambar 6.3 tampak bahwa dengan static SMC, temperatur uap stabil disekitar 740 K pada saaat jam ke-9,9 dan masih mengalami osilasi antara 700 K - 900 K. Pada gambar 6.4 tampak bahwa dengan dynamic SMC, temperatur uap stabil disekitar 713,8 K pada saat jam ke-9 dan masih ada sedikit osilasi menurun.
Gambar 6.3 Grafik Temperatur Uap (static SMC) dengan Sinyal Sinus Kecil
Gambar 6.4 Grafik Temperatur Uap (dynamic SMC) dengan Sinyal Sinus Kecil
Hasil yang diperoleh untuk gangguan eksternal berupa sinyal fungsi sinus besar adalah tampak pada gambar 6.5 bahwa dengan static SMC, ketinggian air stabil disekitar 0,7684 m pada saat jam ke-3 dan mengalami overshoot keatas disekitar 2,95 m pada saat jam-0,17. Pada gambar 6.6 tampak bahwa dengan dynamic SMC, ketinggian air stabil disekitar 0,7747 m pada saat jam ke-2,5 dan masih ada sedikit osilasi. Terjadi overshoot keatas disekitar 1,085 m pada saat jam ke-0,4 dan overshoot kebawah disekitar 0,54 meter pada saat jam ke-1,2.
Gambar 6.5 Grafik Ketinggian Air (static SMC) dengan Sinyal Sinus Besar
Gambar 6.6 Grafik Ketinggian Air (dynamic SMC) dengan Sinyal Sinus Besar
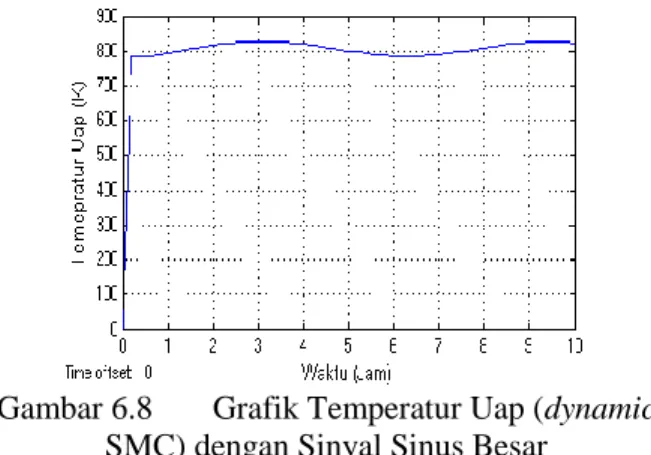
Pada gambar 6.7 bahwa dengan static SMC, temperatur uap stabil disekitar 516,2 K pada saat jam ke-9,9 dan mengalami osilasi antara 400 K - 900 K. Pada gambar 6.8 tampak bahwa dengan dynamic SMC, temperatur uap stabil disekitar 823,5 K pada saat jam ke-9 dan masih mengalami osilasi.
Gambar 6.7 Grafik Temperatur Uap (static SMC) dengan Sinyal Sinus Besar
Gambar 6.8 Grafik Temperatur Uap (dynamic SMC) dengan Sinyal Sinus Besar
Pada sistem pengendali static SMC tampak diberikan gangguan eksternal berupa sinyal square dan fungsi sinus untuk pengendali ketinggian air sudah bekerja dengan baik karena masih stabil disekitar 0.7622 m pada saat jam ke-3 sehingga itu menggambarkan bahwa static SMC pada sistem pengendali ketinggian air tahan terhadap gangguan eksternal sedangkan dynamic SMC pada sistem pengendali ketinggian air masih terdapat osilasi ketika diberi gangguan eksternal.
Pada sistem pengendali temperatur uap, dynamic SMC sudah bekerja dengan baik karena masih stabil di posisi yang diinginkan sehingga dapa menggambarkan bahwa dynamic SMC pada sistem pengendali temperatur uap tahan terhadap gangguan eksternal sedangkan static SMC pada sistem pengendali temperatur uap masih terdapat osilasi dan membutuhkan waktu yang lama untuk stabil.
6.2 Simulasi dengan Gangguan Internal
Simulasi ini dilakukan dengan mengubah nilai parameter pada sistem steam drum boiler untuk menguji sensitifitas sistem terhadap ketidakpastian dari dalam sistem. Parameter yang diubah adalah Flow air yang masuk, temperatur air yang masuk, kapasitas panas dalam steam drum boiler, koefisien control valve. Pengujian sistem pengendali dilakukan dengan memperbesar parameter sesuai batasan yang diberikan.
1. Gangguan Internal dengan Memperbesar Parameter
Simulasi ini dilakukan dengan memperbesar parameter dari nilai semula yaitu flow
air yang masuk Fin=400 ; temperatur air yang masuk Tin=800 ; kapasitas panas steam drum boiler Cp=100 ; koefisien control valve k=1. Sehingga diperoleh hasil pengujian seperti yang ditunjukkan pada gambar 6.9, gambar 6.10, gambar 6.11, gambar 6.12.
Pada gambar 6.9 tampak bahwa dengan static SMC, ketinggian air stabil disekitar 0,7623 m pada saat jam ke-3 dan mengalami overshoot keatas disekitar 2,98 m pada saat jam ke-0,17. Pada gambar 6.10 tampak bahwa dengan dynamic SMC, ketinggian air stabil disekitar 0,7618 m pada saat jam ke-2,5 dan mengalami overshoot keatas disekitar 1,09 m pada saat jam-0,4 dan mengalami overshoot kebawah disekitar 0,55 m pada saat jam ke-1,2.
Gambar 6.9 Grafik ketinggian air (static SMC) dengan parameter diperbesar
Gambar 6.10 Grafik Ketinggian Air (dynamic SMC) dengan Parameter Diperbesar
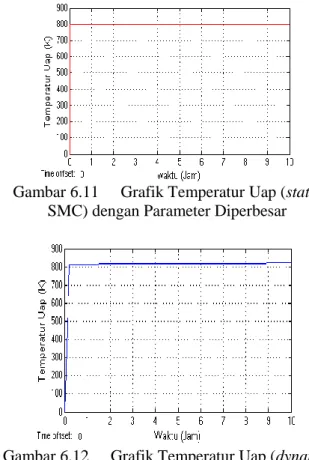
Pada gambar 6.11 tampak bahwa dengan static SMC, temperatur uap stabil disekitar 800 K pada saat jam ke-0,15. Terlihat pada gambar 6.12 bahwa dengan DSMC, temperatur uap stabil disekitar 821 K pada saat jam ke-0,2.
Gambar 6.11 Grafik Temperatur Uap (static SMC) dengan Parameter Diperbesar
Gambar 6.12 Grafik Temperatur Uap (dynamic SMC) dengan Parameter Diperbesar
Sistem pengendali static SMC dan dynamic SMC sudah tahan terhadap gangguan internal. Namun dynamic SMC lebih baik karena mendekati posisi yang diinginkan dengan waktu relatif lebih singkat daripada static SMC.
Sehingga dynamic SMC dapat dikatakan lebih robust terhadap gangguan baik gangguan eksternal maupun gangguan internal daripada static SMC. Namun dalam desain contoller
w
danQ
dynamic SMC tingkat kesulitannya lebih tinggi daripada static SMC tetapi performansi dynamic SMC lebih baik daripada static SMC.7. Kesimpulan dan Saran 7.1 Kesimpulan
Dari analisis dan pembahasan yang telah dilakukan penerapan metode Sliding Mode Control (SMC) pada pengendalian ketinggian air dan temperatur uap pada steam drum boiler diperoleh kesimpulan bahwa:
1. Rancangan sistem pengendali SMC dapat diterapkan pada pengendalian ketinggian air
dan temperatur uap pada steam drum boiler. Dengan membedakan pengendali SMC menjadi dua yaitu : Static Sliding Mode Control (SSMC) dan Dynamic Sliding Mode Control (DSMC).
2. Performansi sistem pengendalian ketinggian air dan temperatur uap pada steam drum boiler dengan Metode static SMC dan dynamic SMC menghasilkan :
a. Dengan metode static SMC, ketinggian air sudah stabil di posisi yang diinginkan tetapi waktunya lebih lama 0,5 jam daripada dynamic SMC. Dan dengan static SMC, temperatur uap lebih cepat daripada dynamic DSMC dan sudah stabil namun masih belum seperti posisi yang diinginkan (masih terjadi 1,27 %). Sedangkan pada dynamic SMC, ketinggian air sudah stabil di posisi yang diinginkan. Untuk temperatur uap juga stabil di posisi yang diinginkan.
b. Pengendali dynamic SMC pada pengendalian ketinggian air dan temperatur uap pada steam drum boiler lebih robust terhadap gangguan eksternal baik bersifat kecil maupun besar dan terhadap gangguan internal baik dalam pengurangan maupun penambahan parameter dibanding static SMC.Namun Pengendali static SMC pada pengendalian temperatur uap pada steam drum boiler lebih robust terhadap gangguan internal baik dalam pengurangan maupun penambahan parameter dibanding dynamic SMC. 3. Dari hasil analisa simulasi dapat
disimpulkan bahwa dynamic SMC dalam desain contoller
w
danQ
dynamic SMC tingkat kesulitannya lebih tinggi daripada static SMC tetapi performansi dynamic SMC lebih baik daripada static SMC.7.2. Saran
Saran yang diajukan dari Tugas
Akhir ini untuk penelitian selanjutnya
adalah: Penggunaan pengendali
dynamic
SMC pada tugas akhir ini sudah cukup baik
bila dibandingkan pengendali
static
SMC,
namun sebaiknya perlu dikaji lebih lanjut
apabila dibandingkan dengan metode lain yang
lebih baru seperti
Fuzzy Logic Controller
(FLC) maupun
Fuzzy Sliding Mode Control
(FSMC).
8. Daftar Pustaka
[1] Baskoro, Buyung, 2009. Peralatan Utama PLTU – Boiler.
<URL:http://buyungbaskoro.blogspot.com/20 09/06/pelaratan-utama-pltu-boiler.html> [2] Herlambang, Teguh.2010, “Pemodelan
Matematika dan Analisis Sifat-Sifat Sistem Level Air dan Temperatur pada Steam Drum Boiler di PLTU 1/2 PT PJB UP Gresik”. Laporan Kerja Praktek, jurusan Matematika, ITS, Surabaya.
[3] Moradi, Hamad.2009.Robust Control of an Industrial Boiler System;a Comparison Between Two Approaches; Sliding Mode Control And
H
Technique.Amirkabir University of Technology,Tehran,Iran. [4] Ogata, Katsuhito, 1984, Modern ControlEngineering, Prentice Hall, USA.
[5] Pakpahan, S.1987.Kontrol Otomatik:Teori dan Penerapan. Jakarta: Erlangga
[6] Perruquetti, Wilfrid dan Barbot, Jean Pierre. 2002. Sliding Mode Control in Engineering. New York: Marcel Dekker, Inc [7] Priyanto, A.2009. “Perancangan dan
Simulasi Sistem Kendali Posisi Magnetic Levitation Ball dengan Menggunakan Metode Sliding Mode Control. Tugas Akhir Jurusan Matematika” , ITS, Surabaya.
[8] Stephanopoulos, George, 1984, Chemical Process Control An Introduction To Theory And Practice, Prentice Hall International, London.
[9] Tien, Nguyen Tan. 2002. Sliding Control. Applied Nonlinear Control. <URL:https://www.hcmut.edu.vn/~nttien/L ectures/Applied%20nonlinear%20control/ C.7%20Sliding%20Control.pdf>
[10] Zhu, F.Q.Q.M., Winfield, A., dan Melhuish, C. 2003. “Fuzzy Sliding Mode Control for Discrete Nonlinear Sistems”. Transactions of China Automation Society, Vol. 22, No. 2 (Sum No. 86).