BAB 3 PERANCANGAN ALAT
3.1 Diagram Blok
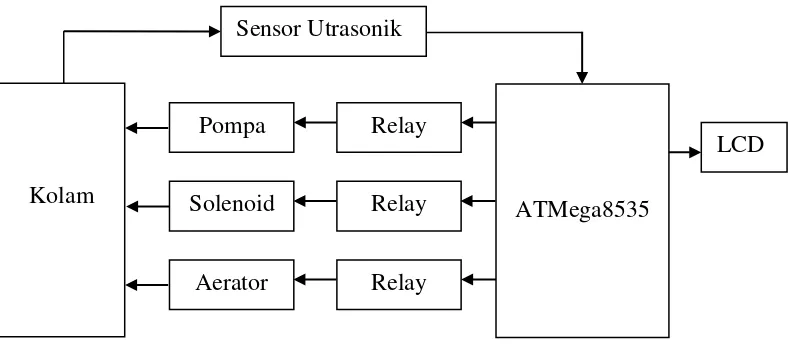
Berikut ini adalah diagram blok sistem rancang bangun alat pengontrol volume air dan aerator pada kolam budidaya udang menggunakan mikrokontroler.
Gambar 3.1 Diagram Alir
Dari diagram blok diatas dapat diketahui cara kerja alat tersebut yakni :
Sensor ultrasonik membaca ketinggi permukaan air. Jarak sensor dan ketinggian permukaan air kolam dibaca oleh mikrokontroler kemudian dikalibrasi ke ketinggian air. Apabila tinggi air kurang dari tinggi air yang diinginkan maka
pompa air bekerja memompa air dari sumber air ke kolam dan apabila tinggi air lebih dari tinggi air yang diinginkan maka Solenoid bekerja membuang air dari
kolam ke tempat pembuangan air. Ketika ketinggian air sudah sesuai dengan ketinggian yang diinginkan maka aerator akan bekerja dan lcd akan menampilkan volume air yang terdapat pada kolam.
3.1.1 Penjelasan tentang Fungsi tiap Blok Alat :
1. Blok Sensor Ultrasonik : Mendeteksi ketinggian air pad kolam 2. Blok ATMega85358 : Sebagai kontroler pengendali sistem 3. Blok Pompa : Mengisi air dari sumber ke kolam
4. Blok Solenoid : Membuang air dari kolam ke pembuangan 5. Blok LCD : Menampilkan hasil pada layar display
Sensor Utrasonik
ATMega8535
Relay Relay Relay Pompa
LCD
Solenoid
6. Blok Aerator : Melarutkan oksigen yang ada di udara ke dalam air kolam
7. Blok Relay : Menghidupkan dan mematikan pompa / aerator / solenoid
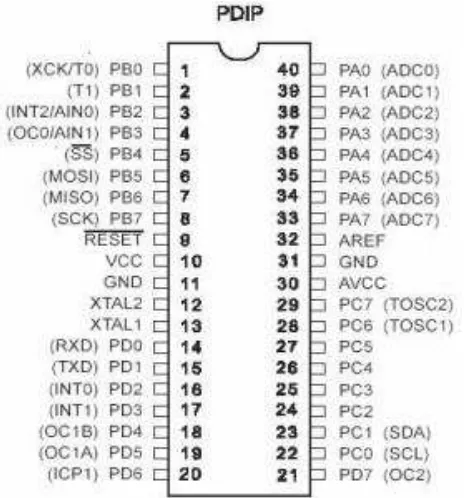
3.2 Rangkaian Minimum Mikrokontroler ATMega8535
Rangkaian sistem minimum mikrokontroler ATMega8535 dapat dilihat pada gambar 3.2 di bawah ini.
Gambar 3.2 Rangkaian Mikrokontroler ATMega8535
Dari gambar 3.2, rangkaian tersebut berfungsi sebagai pusat kendali dari seluruh sistem yang ada. Komponen utama dari rangkaian ini adalah IC Mikrokontroler ATMega8535. Semua program diisikan pada memori dari IC ini sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki. Pin 12 dan 13 dihubungkan ke XTAL 11.0952 MHz dan 2 buah kapasitor. XTAL ini akan mempengaruhi kecepatan mikrokontroler ATMega8535 dalam mengeksekusi perintah dalam program. Pin 9 merupakan masukan reset (aktif rendah). Pulsa transisi dari tinggi ke rendah akan me-reset mikrokontroler ini. Mikrokontroler
23
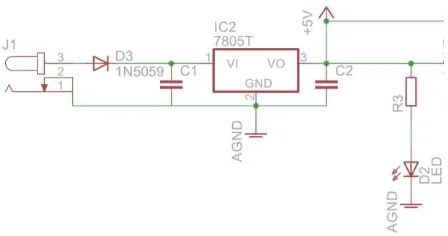
3.3 Rangkaian Power Supply
Rangkaian power supply pada alat ini berfungsi sebagai sumber daya untuk mengoprasikan sistem ini. Rangkaian power supply dapat dilihat pada gambar 3.3 berikut ini.
Gambar 3.3 Rangkaian Power Supply
Untuk mempermudah perancangan alat ini maka saya menggunakan power supply 12 volt yang sudah tersedia dipasaran. Tetapi mikrokontroler hanya membutuhkan 5 volt. Jadi untuk menurunkan dan menstabilkan tegangan maka pada rangkaian ini digunakan IC7805 yang berfungsi untuk menjaga tegangan 5 volt dan akan dipergunakan untuk mengoprasikan sistem ini.
3.4 Rangkaian LCD 16x2 Karakter
Pada alat ini, display yang digunakan adalah LCD 16x2 karakter. Untuk blok ini tidak ada komponen tambahan karena mikrokontroler dapat memberi data langsung ke LCD, pada LCD Hitachi- M1632 sudah terdapat driver untuk mengubah data ASCII output mikrokontroler menjadi tampilan karakter. Pemasangan potensio sebesar 5KΩ untuk mengatur kontras karakter yang tampil.
Gambar 3.4 Rangkaian LCD 16x2 Karakter
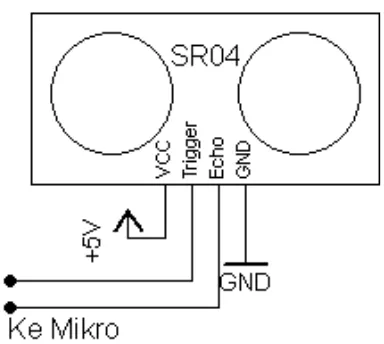
3.5 Rangkaian Sensor Ultrasonik (HC-SR04)
Tipe sensor ultrasonik yang digunakan adalah HC-SR04 yang merupakan salah satu sensor yang cukup akurat. Pada rangkaian ini sensor ultrasonik dihubungkan ke VCC, GND, PB0 dan PB1. Rangkaian Sensor Ultrasonik HC-SR04 dapat dilihat gambar 3.5 berikut ini.
Gambar 3.5 Rangkaian Sensor Ultrasonik HC-SR04
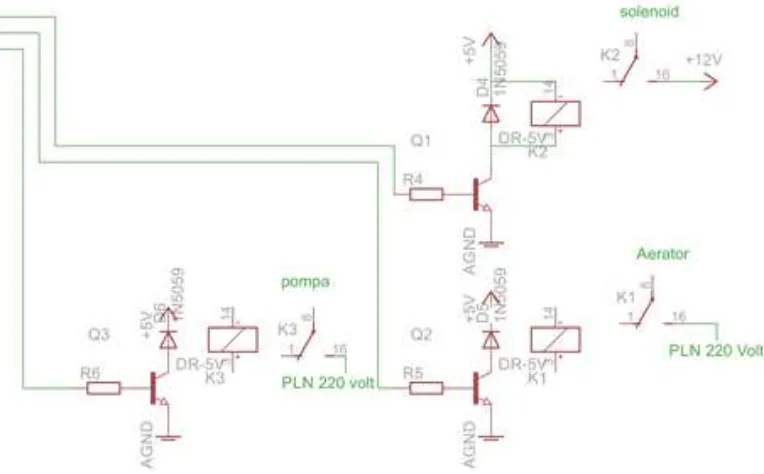
3.6 Rangkaian Relay, Pompa, Aerator dan Solenoid
25
untuk mengendalikan Pompa, Aerator dan Solenoid. Ketika basisi diberikan supply maka kolektor dan emitter dalam keadaan satu rasi. Sehingga relay hidup dan menutup katupnya. Diode berfungsi sebagai menghidari arus balik. Pompa, Aerator, dan Solenoid terhubung ke COM dan NC sehingga ketika basis transistor diberi supply oleh mikrokontroler transistor akan mengalami satu rasi dan relay akan aktif dan Pompa, Aerator, dan Solenoid aktif.
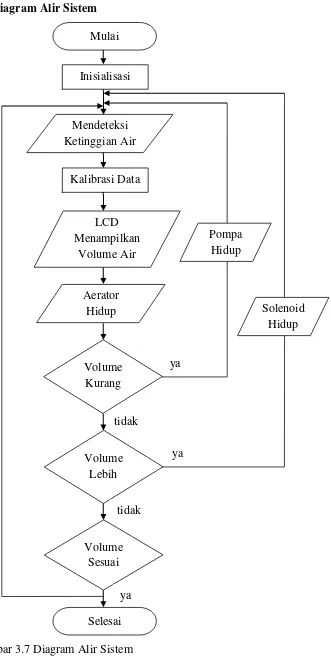
3.7 Diagram Alir Sistem
Gambar 3.7 Diagram Alir Sistem Mulai
Mendeteksi Ketinggian Air
Inisialisasi
Kalibrasi Data
Volume Kurang
Volume Lebih
Selesai Volume Sesuai
LCD Menampilkan
Volume Air
Aerator Hidup
tidak
ya
ya
tidak
ya
Pompa Hidup
BAB 4 PENGUJIAN ALAT DAN PROGRAM
4.1 Pengujian Mikroktroler ATMega8535
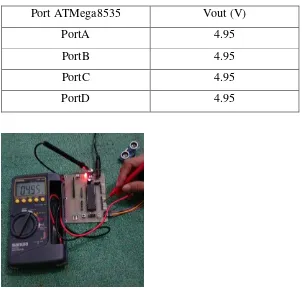
Pengujian pada rangkaian mikrokontroler ATMega8535 ini dapat dilakukan dengan menghubungkan rangkaian ini dengan rangkaian power supply sebagai sumber tegangan. Kaki 10 dan 30 dihubungkan dengan sumber tegangan 5 volt, sedangkan kaki 11 dan dan 31 dihubungkan dengan ground. Kemudian tegangan pada kaki 10 diukur dengan menggunakan Voltmeter. Dari hasil pengujian didapatkan tegangan pada kaki 10 sebesar 4,95 Volt. Langkah selanjutnya adalah memberikan program sederhana pada mikrokontroler ATMega8535 untuk menguji port-port yang terdapat pada ATMega8535, program yang diberikan adalah sebagai berikut:
#include <mega8535.h> #include <delay.h> #include <stdio.h> while (1)
{
PORTA = 0xFF;
PORTB = 0xFF;
PORTC = 0xFF; PORTD = 0xFF;
delay_ms(2000);
PORTA = 0x00;
PORTB = 0x00;
PORTC = 0x00; PORTD = 0x00;
delay_ms(2000);
}
Pengujian port ini dilakukan untuk mengetahui apakah seluruh pin yang
Tabel 4.1 Pengujian Port ATMega8535
Port ATMega8535 Vout (V)
PortA 4.95
PortB 4.95
PortC 4.95
PortD 4.95
Gambar 4.1 Pengujian Vout Power Supply
4.2 Pengujian Sensor Ultrasonik (HC-SR04)
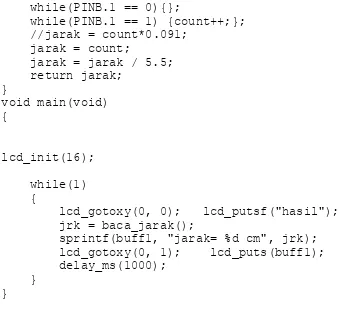
Pengujian sensor ultrasonik dilakukan dengan memprogram kontroler untuk membaca data sensor dan mengeluarkannya ke port serial. Penggalan listing program tersebut adalah sebagai berikut:
#include <mega8535.h> #include <stdio.h> #include <delay.h>
#include <alcd.h>
unsigned int count = 0; unsigned char jarak; unsigned char jrk;
unsigned char buff1[16]; unsigned char buff2[16];
unsigned int baca_jarak() {
count = 0;
29
while(PINB.1 == 0){};
while(PINB.1 == 1) {count++;}; //jarak = count*0.091;
jarak = count;
jarak = jarak / 5.5; return jarak;
}
void main(void) {
lcd_init(16);
while(1) {
lcd_gotoxy(0, 0); lcd_putsf("hasil"); jrk = baca_jarak();
sprintf(buff1, "jarak= %d cm", jrk); lcd_gotoxy(0, 1); lcd_puts(buff1); delay_ms(1000);
} }
Setelah diunduh dan dijalankan maka dapat diuji bacaan sensor dan tampilan pada display LCD. Menampilkan data pada LCD digunakan program CVAVR. Setalah diaktifkan sensor diberikan objek pemantul dengan jarak mulai dari 4 cm data akan terlihat pada display LCD.
Gambar 4.2 Pengujian Sensor Ultasonik (HC-SR04)
4.3 Pengujian LCD 16x2 Karakter
RS dihubungkan ke PC0 EN dihubungkan ke PC1 D4 dihubungkan ke PC4 D5 dihubungkan ke PC5 D6 dihubungkan ke PC6 D7 dihubungkan ke PC7
Jalur EN dinamakan Enable. Jalur ini digunakan untuk memberitahu LCD bahwa anda sedang mengirimkan sebuah data. Untuk mengirimkan data ke LCD, maka melalui program EN harus dibuat logika low “0” dan set high “1” pada dua jalur kontrol yang lain RS dan RW. Jalur RW adalah jalur kontrol Read/Write. Ketika RW berlogika low “0” , maka informasi pada bus data akan dituliskan pada layar LCD. Ketika RW berlogika high “1”, maka program akan melakukan pembacaan memori dari LCD. Sedangkan pada aplikasi umum pin RW selalu berlogika low “0”.
Dibawah ini merupakan gambar tampilan display LCD, dimana saya sudah berhasil menampilkan tulisan kata “Test LCD” di baris pertama display LCD 16x2 karakter dan tulisan “Wils Osvaldo B” di baris kedua display LCD 16x2 karakter. Tulisan pada tampilan LCD diperoleh karana sudah ada pada library LCD jika kita hanya mencetak string atau karakter saja pada saat mengisi program
31
lcd_putsf("Wils Osvaldo B"); }
}
Gambar 4.3 Pengujian LCD 16x2 Karakter
4.4 Pengujian Power Supply
Pengujian rangkaian power supply ini bertujuan untuk mengetahui tegangan yang dikeluarkan oleh rangkaian tersebut, dengan mengukur tegangan keluaran dari power supply menggunakan multimeter digital.
Pada pengujian yang dilakukan tegangan masuk dari PLN sebesar 220 Volt AC kemudian masuk ke trafo diubah menjadi 12 Volt AC, kemudian di searahkan oleh Dioda sebesar 12 Volt DC. Kemudian tegangan 12 Volt DC itu diubah oleh IC7805 menjadi 5 Volt DC.
Setelah dilakukan pengukuran maka diperoleh besarnya tegangan keluaran sebesar 5 Volt. Dengan begitu dapat dipastikan apakah terjadi kesalahan terhadap rangkaian atau tidak. Jika diukur, hasil dari keluaran tidak murni sebesar +5 Volt dikarenakan beberapa faktor, diantaranya kualitas dari tiap-tiap komponen yang
digunakan tidak stabil. Dibawah ini dapat dilihat input dan output pada rangkaian power supply yang digunakan pada saat pengujian.
Tabel 4.2 Pengujian Input dan Output pada Pengujian Power Supply
Vin Vout
Pengujian pada power supply dapat kita lihat pada gambar 4.4 berikut ini :
(a) (b)
Gambar 4.4 Pengujian Pada Power Supply (a) Vin dan (b) Vout
4.5 Pengujian Relay, Pompa, Aerator, dan Solenoid
Untuk pengujian relay yaitu diberikan tegangan pada kaki basis di transistor, maka transistor BD139 akan aktif (satu rasi). Hal ini menyebabkan kumparan pada relay teraliri arus listrik. Dengan demikian, kontak relay aka terhubung. Dioda berfungsi sebagai komponen pengaman transistor arus balik yang mungkin timbul akibat dari aktifnya kumparan relay.
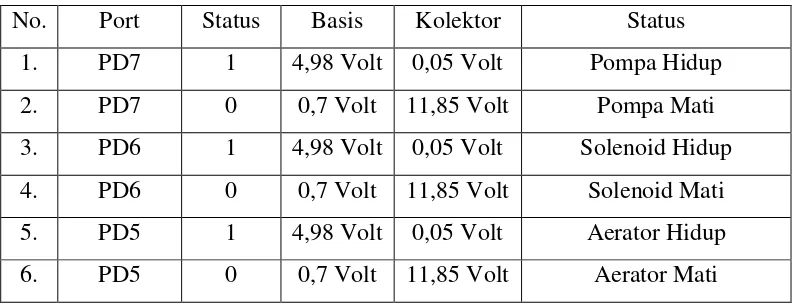
Pengujian dilakukan dengan mengukur tegangan pada basis dan kolektor pada saat “high” dan “low” pada PD7, PD6, dan PD5 menggunakan multimeter digital. Dibawah ini adalah tabel pengujian relay:
Tabel 4.3 Pengujian Relay, Pompa, Aerator, dan Solenoid
No. Port Status Basis Kolektor Status
1. PD7 1 4,98 Volt 0,05 Volt Pompa Hidup
2. PD7 0 0,7 Volt 11,85 Volt Pompa Mati 3. PD6 1 4,98 Volt 0,05 Volt Solenoid Hidup
4. PD6 0 0,7 Volt 11,85 Volt Solenoid Mati
5. PD5 1 4,98 Volt 0,05 Volt Aerator Hidup
6. PD5 0 0,7 Volt 11,85 Volt Aerator Mati
33
Apabila relay aktif maka pompa, aerator, dan solenoid akan hidup dan bila relay tidak aktif maka pompa, aerator, dan solenoid akan mati.
4.6 Pengujian Keseluruhan
Pengujian keseluruhan ini bertujuan untuk mengetahui apakah fungsi tiap blok berjalan dengan baik. Prinsip kerja dari alat ini adalah sensor ultrasonik dipasang 31 cm di atas kolam lalu sensor akan membaca ketinggian dari air yang terdapat pada kolam. Lalu data ketinggian dari kolam akan dioleh oleh mikrokontroler untuk mendapat nilai volume dari air yang terdapat pada kolam. Apabila volume air pada kolam kurang dari volume yang diinginkan maka pompa akan hidup mengisi air dari sumber air ke dalam kolam.
akan hidup membantu melarutkan oksigen yang ada di udara ke dalam air pada kolam. Kemudian nilai volume air, ketinggian air, status pompa, status aerator, dan status solenoid akan ditampilkan pada display LCD.
Tabel 4.4 Ketinggian Air, Volume dan Status Pompa, Aerator, dan Solenoid
Ketinggian Air (cm)
Volume Air (mL)
Status
Pompa Aerator Solenoid
0 0 Hidup Mati Mati
1 2500 Hidup Hidup Mati
2 5000 Hidup Hidup Mati
3 7500 Hidup Hidup Mati
4 10000 Hidup Hidup Mati
5 12500 Hidup Hidup Mati
6 15000 Hidup Hidup Mati
7 17500 Hidup Hidup Mati
8 20000 Hidup Hidup Mati
9 22500 Hidup Hidup Mati
10 25000 Hidup Hidup Mati
11 27500 Hidup Hidup Mati
12 30000 Hidup Hidup Mati
13 32500 Hidup Hidup Mati
14 35000 Hidup Hidup Mati
15 37500 Hidup Hidup Mati
16 40000 Hidup Hidup Mati
17 42500 Hidup Hidup Mati
18 45000 Hidup Hidup Mati
19 47500 Mati Hidup Mati
20 50000 Mati Hidup Mati
21 52500 Mati Hidup Mati
22 55000 Mati Hidup Hidup
35
24 60000 Mati Hidup Hidup
25 62500 Mati Hidup Hidup
26 65000 Mati Hidup Hidup
27 67500 Mati Hidup Hidup
Kolam yang digunakan berbentuk balok dengan lebar 50cm, tinggi 50 cm dan tinggi 30 cm. Volume Air secara matematis dapat dihitung menggunakan rumus sebagai berikut:
t
Maka, hasil yang didapat dengan menggunakan rumus di atas adalah :
1. Sensor membaca ketinggi 0 cm
t
2. Sensor membaca ketinggi 1 cm
t
3. Sensor membaca ketinggi 2 cm
4. Sensor membaca ketinggi 3 cm
5. Sensor membaca ketinggi 4 cm
t
6. Sensor membaca ketinggi 5 cm
t
7. Sensor membaca ketinggi 6 cm
t
8. Sensor membaca ketinggi 7 cm
t
9. Sensor membaca ketinggi 8 cm
t
10. Sensor membaca ketinggi 9 cm
37
11. Sensor membaca ketinggi 10 cm
t
12. Sensor membaca ketinggi 11 cm
t
13. Sensor membaca ketinggi 12 cm
t
14. Sensor membaca ketinggi 13 cm
t
15. Sensor membaca ketinggi 14 cm
t
16. Sensor membaca ketinggi 15 cm
t
17. Sensor membaca ketinggi 16 cm
18. Sensor membaca ketinggi 17 cm
19. Sensor membaca ketinggi 18 cm
t
20. Sensor membaca ketinggi 19 cm
t
21. Sensor membaca ketinggi 20 cm
t
22. Sensor membaca ketinggi 21 cm
t
23. Sensor membaca ketinggi 22 cm
t
24. Sensor membaca ketinggi 23 cm
39
25. Sensor membaca ketinggi 24 cm
t l p
V
V = 50 cm x 50 cm x 24 cm V = 60000 cm3
V = 60000 mL
26. Sensor membaca ketinggi 25 cm
t l p
V
V = 50 cm x 50 cm x 25 cm V = 62500 cm3
V = 62500 mL
27. Sensor membaca ketinggi 26 cm
t l p
V
V = 50 cm x 50 cm x 26 cm V = 65000 cm3
V = 65000 mL
28. Sensor membaca ketinggi 27 cm
t l p
V
V = 50 cm x 50 cm x 27 cm V = 67500 cm3
5.1 Kesimpulan
Dari hasil perancangan alat hingga pengujian dan pembahasan sistem maka penulis dapat menarik kesimpulan, antara lain:
1. Telah berhasil dirancang sebuah alat yang dapat mengontrol volume air dan aerator pada kolam budidaya udang menggunakan sensor ultrasonik berbasis ATMega8535 dengan display LCD.
2. Berdasarkan pengujian maka prinsip kerja dari alat adalah apabila ketinggian air kurang dari 19 cm maka pompa akan mengisi air dari sumber air ke dalam kolam. Dan apabila ketinggian air lebih dari 21 cm maka solenoid akan membuang air dari kolam ke pembuangan air. Setelah ketinggian air sesuai dengan keinginan maka aerator akan membantu melarutkan oksigen yang ada di udara ke dalam air pada kolam.
3. Berdasarkan pengujian maka didapat cara mengkalibrasi data sensor ke nilai volume air yaitu dengan cara menghitung hasil perkalian antara ketinggian air yang dibaca oleh sensor dengan luas bidang datar kolam
budidaya udang
5.2 Saran
Setelah melakukan penelitian, diperoleh beberapa hal yang dapat dijadikan saran untuk melakukan penelitian ini lebih lanjut yaitu:
1. Untuk pengembangan lebih lanjut, perlu dibuat kolam yang lebih besar sesuai dengan kolam budidaya yang sesungguhnya.