MOD
DEN
Fak
DEL PEN
NGAN P
Diajukan
Memp
P
akultas Sain
PROGR
FAKUL
UNIV
TUG
ENGONT
PENGEN
kan untuk Me
mperoleh Ge
Program St
in dan Tekno
di TJIN NIM
GRAM STU
ULTAS SAI
IVERSITAS
YOG
GAS AKH
NTROL S
ENDALI
Memenuhi S
Gelar Sarjana
Studi Teknik
nologi Unive
disusun oleh: JIN YATMIK IM: 04511400UDI TEKN
AINS DAN
AS SANAT
GYAKART
2008
HIR
SUHU R
LOGIK
i Salah Satu
ana Teknik p
AIR C
Scien
ELE
CONDIT
LO
Presente
Sarjana Te
ience and Tec
LECTRICA
SCIENCE
SAN
FINAL
ITIONIN
LOGIC C
nted as one o
Teknik Degr
Technology F
TJIN Student N
AL ENGIN
CE AND TE
NATA DHA
YOG
AL PROJE
ING MOD
CONTRO
e of the requi
egree in Elec
y Faculty San
by:
JIN YATMIK t Number: 045
LEMBAR PERNYATAAN KEASLIAN KARYA
Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis ini tidak memuat karya atau bagian karya orang lain, kecuali yang telah disebutkan dalam daftar pustaka, sebagaimana layaknya karya ilmiah.
Yogyakarta, 28 Juli 2008
Penulis
INTISARI
Pendingin ruangan saat ini masih banyak yang menggunakan refrigeran yang mengandung klor (Cl) seperti freon atau CFC (Chlorofluorocarbon). Zat tersebut ternyata tidak ramah lingkungan. Zat-zat tadi dapat merusak lapisan ozon di atmosfer bumi dan berdampakpemanasan global.
Pada penelitian ini penulis menggunakan termoelektrik sebagai komponen utama untuk mendinginkan ruangan. Data dari sensor suhu dan sensor kecepatan kipas melalui ADC internal di ubah ke digital dan diproses lebih lanjut untuk dibandingkan dengan nilai setpoint dan akan dihasilkan suatu nilai error. Kemudian nilai error ini akan diolah sesuai dengan aturan logika fuzzy
menggunakan mikrokontroler ATmega8535. Data yang diolah akan ditampilkan ke LCD dan komputer. Data yang ditampilkan ke komputer menggunakan komunikasi serial. Data disimpan dalam format excel sehingga dapat diolah dengan mudah dalam bentuk grafik. Data-data tersebut diolah menggunakan Visual Basic 6.0.
Dari hasil pengujian dan analisa, alat ini dapat mengendalikan suhu model ruangan dan kecepatan kipas dengan tingkat kesalahan (steady state error) kurang dari 5%.
ABSTRACT
Nowadays, most of air conditioning use refrigerant contains chlorine (CL) such as freons or CFC (Chlorofluorocarbon). They bring harmful effects to the environment. They can destroy ozone layer in the atmosphere and cause global warming.
Thermoelectric is used in this research as the main component to refrigerate the room. The data from temperature and velocity censors are changed into digital form through internal ADC. Then they are processed to compare with the set point values. The results are error values. Those error values will be processed using ATmega8535 microcontroller agree with fuzzy logic rules. The processed data will be displayed on the LCD and the computer. In the computer the serial communication is used to transfer data. The data are stored in excel format to be processed easily into graph. They are processed using Visual Basic 6.0.
From the test and analytical results, the device is able to control the mode room temperature and the fan velocity with the steady state error less than 5 %.
KATA PENGANTAR
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Esa atas
berkat dan rahmat-Nya sehingga penulis dapat menyelesaikan karya tulis
berjudul “Model Pengontrol Suhu Ruangan Dengan Pengendali Logika Fuzzy
(Air Conditioning Model With Fuzzy Logic Controller)”
Karya tulis ini merupakan salah satu syarat untuk memperoleh gelar
Sarjana Teknik pada Program Studi Teknik Elektro Universitas Sanata Dharma.
Penulisan skripsi ini didasarkan pada hasil-hasil yang penulis dapatkan selama
tahap perancangan, pembuatan dan pengujian alat.
Penulisan skripsi ini tidak terlepas dari bantuan berbagai pihak. Untuk itu,
penulis mengucapkan terima kasih kepada:
1. Kedua orang tua penulis yang telah memberikan semangat dan doa yang tak
pernah putus sehingga penulis dapat menyelesaikan tugas akhir ini.
2. Ibu B. Wuri Harini, S.T., M.T., selaku dosen pembimbing I karya tulis yang
telah meluangkan waktu, tenaga, dan pikirannya untuk membimbing penulis.
3. Bapak Ir. Tjendro, selaku dosen pembimbing II karya tulis yang telah
meluangkan waktu, tenaga, dan pikirannya untuk membimbing penulis.
4. Bapak Ir. Bayu Primawan, M. Eng selaku Ketua Jurusan Teknik Elektro
Universitas Sanata Dharma Yogyakarta.
5. Romo Ir. Greg. Heliarko SJ.,SS.,BST.,MA.,MSC Selaku Dekan Fakultas
6. Rekan-rekan yang telah memberikan dukungan kepada penulis dalam
pengerjaan karya tulis ini: Emerita Setyowati (Fisika UGM), Henry Rawung
(TE’04), Willi (TE’04), Sevriady (TE’04), Suci Apsari (TE’04), Ni Made Juli
Artuti (TE’04), Yustina (TE’04).
7. Segenap dosen dan laboran Teknik Elektro Universitas Sanata Dharma.
8. Segenap karyawan sekretariat Fakultas Teknik.
9. Teman-teman mahasiswa jurusan Teknik Elektro dan semua pihak yang tidak
dapat disebutkan satu persatu atas setiap bantuannya.
Penulis menyadari bahwa masih banyak kelemahan dan kekurangan dari
penulisan karya tulis ini. Oleh karena itu segala kritik dan saran yang bersifat
membangun sangat penulis harapkan.
Akhir kata, semoga skripsi ini berguna bagi semua pihak dan dapat
menjadi bahan kajian lebih lanjut.
Yogyakarta, 28 Juli 2008
Penulis
xii
DAFTAR ISI
HALAMAN JUDUL... i
HALAMAN JUDUL DALAM BAHASA INGGRIS... ii
LEMBAR PENGESAHAN PEMBIMBING... iii
LEMBAR PENGESAHAN PENGUJI... iv
LEMBAR PERNYATAAN KEASLIAN KARYA... v
MOTTO DAN PERSEMBAHAN... vi
HALAMAN PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH………. vii
INTISARI... viii
ABSTRACT... ix
KATA PENGANTAR... x
DAFTAR ISI... xii
DAFTAR GAMBAR... xvii
DAFTAR TABEL... xxiii
DAFTAR LAMPIRAN... xxv
BAB I. PENDAHULUAN ... 1
1.1 Judul ... 1
1.2 Latar Belakang Masalah ……… 1
1.3 Tujuan dan Manfaat ... 3
xiii
1.5 Metodologi Penelitian... 4
1.6 Sistematika Penulisan ... 5
BAB II. DASAR TEORI ... 7
2.1. Termoelektrik ... 7
2.2 Rangkaian Elektronis ... 9
2.2.1 Penguat Non-Inverting ... 9
2.2.2 Komparator ... 9
2.2.3 Frequency-to-Voltage Converters... 10
2.2.4 Sensor Suhu LM35………. 11
2.2.5 Opto-Couple……… 11
2.2.6 Transistor Konfigurasi Darlington ……… 11
2.2.7 MOSFET Sebagai Saklar ……….. 12
2.3. Mikrokontroler AVR Seri ATmega8535 ...………. 13
2.3.1 Gambaran Umum ………...……… 13
2.3.2 Fitur ATmega8535 [7]……… 13
2.3.3 Peta Memori ...……… 14
2.3.4 Interupsi ……….……… 14
2.3.5 Timer /Counter……...……… 16
2.3.6 ADC (Analog To Digital Converter)………. 18
xiv
2.4. LCD HD44780 [ 7 ] ………..… 26
2.4.1 Proses Menampilkan Karakter di LCD ………... 27
2.5. Keypad……...………. 27
2.6 Komunikasi Serial RS232 ……….……….... 28
2.7 Konfigurasi Serial DB-9 ………. 30
2.8 Visual Basic ………... 33
2.8.1 Penggunaan Komponen Timer ……….... 33
2.8.2 Penggunaan Komponen Label ………. 34
2.8.3 Penggunaan Komponen TextBox ...………. 34
2.8.4 Penggunaan Komponen Command Button……….. 35
2.8.5 Pengaksesan dengan menggunakan Kontrol MSComm …..…… 35
2.9. Sistem Kendali Fuzzy ... 36
2.9.1 Himpunan Klasik (crisp) ... 36
2.9.2 Logika Fuzzy ... 38
2.9.3 Fusifikasi (fuzzification) ... 39
2.9.4 Inferensi ... 41
2.9.5 Komposisi ... 42
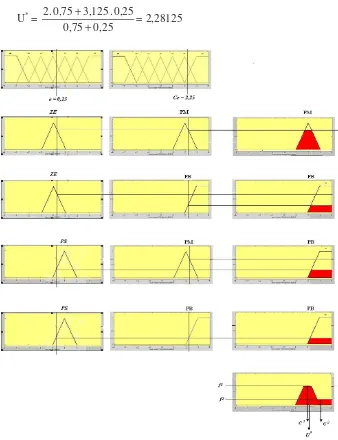
2.9.6 Defusifikasi (defuzzification) ... 42
2.9.7 Logika Fuzzy dalam Teknik Kendali ... 43
2.10 Tanggapan Transien …….……….. 50
BAB III. RANCANGAN PENELITIAN ... 52
xv
3.2 Perancangan Perangkat Keras ... 55
3.2.1 Pengkondisi sinyal... 55
3.2.1.1Penguat Non-Inverting... 55
3.2.1.2Opto-coupler sebagai Sensor Kecepatan Motor ... 57
3.2.1.3Komparator ……… 58
3.2.1.4Frequency-to-Voltage Converters ... 58
3.2.2 Driver Kipas ……….. 59
3.2.3 Penguat Daya ……… 61
3.2.4 Antarmuka Mikrokontroler ATmega8535 dengan HD44780… 62 3.2.5 Keypad ……….. 63
3.3 Perancangan Perangkat Lunak ... 64
3.3.1 Perancangan Program pada Mikrokontroler ... 64
3.3.1.1Tampilan Awal Program ... 65
3.3.1.2Meminta Masukan Data ... 66
3.3.1.3Pengolahan Data ……… 67
3.3.1.4Subrutin Baca ADC ………... 68
3.3.1.5Fuzzy ……….. 69
3.3.1.6Keypad ………... 70
3.3.2 Perancangan Membership ………... 71
3.3.3 Perancangan Perangkat Lunak Pada Visual Basic 6.0 .. 72
3.3.3.1Program Form Eksekusi ……… 72
3.3.3.2Interupsi Timer ………... 72
xvi
3.3.3.4Interupsi CommondButton Untuk Form Pembuka ... 76
3.3.3.5Menampilkan Data ke Visual Basic ... 77
BAB IV. HASIL DAN PEMBAHASAN …….……… 78
4.1 Hasil Pengujian Terhadap Plant ……… 78
4.2 Hasil Pengujian Terhadap Plant Dengan Gangguan ...………. 84
4.2 Tampilan Pada LCD ………... 87
4.3 Pengujian Terhadap program di VB 6.0 ………... 88
4.4 Hasil Pengujian Terhadap Pengkondisi Sinyal Sensor ………. 91
4.4.1 Penguat Non-Inverting ………. 91
4.1.2 Driver Kipas ……….………. 92
4.1.3 Frequency-to-Voltage Converters……….. 95
4.1.4 Penguat Daya ……….………... 96
BAB V. KESIMPULAN DAN SARAN………... 97
5.1 Kesimpulan ………..………... 97
5.2 Saran ………... 97
DAFTAR PUSTAKA
DAFTAR GAMBAR
1. Gambar 2-1 Efek peltier yang terjadi pada rangkaian tertutup dari dua
batang logam berbeda bahan ... 8
2. Gambar 2-2 Potongan melintang sambungan termoelektrik dengan sepasang semikonduktor tipe “P” dan tipe “N” ... 8
3. Gambar 2-3 Penguat non-inverting ... 9
4. Gambar 2-4 Komparator ... 10
5. Gambar 2-5 Rangkaian Frequency-to-Voltage Converters dengan IC LM331 [18] ……… 10
6. Gambar 2-6 Transistor dengan konfigurasi dharlington ... 12
7. Gambar 2-7 Rangkaian MOSFET sebagai switching ... 12
8. Gambar 2-8 Register MCUCR[7]... 15
9. Gambar 2-9. Register GICR[7]... 15
10. Gambar 2-10 Register TCCR0[7] ………... 16
11. Gambar 2-11 Register TCCR1B[7] ……….. 17
12. Gambar 2-12 Register TCCR2[7] ………. 17
13. Gambar 2-13 Register ADMUX[7] ... 18
14. Gambar 2-14 Format data ADC dengan ADLAR=0 [7] ... 18
15. Gambar 2-15 Format data ADC dengan ADLAR=1 [7] ... 19
16. Gambar 2-16 Register ADCSRA[7]... 19
17. Gambar 2-17 Pin LCD HD44780 ………. 26
19. Gambar 2-19 Level Tegangan RS 232[14,15] ……….. 29
20. Gambar 2-20 Konfigurasi IC MAX232 ……… 29
21. Gambar 2-21 Circuit Diagram MAX 232 ………. 30
22. Gambar 2-22 Konfigurasi Serial DB-9[14]..………. 30
23. Gambar 2-23 Himpunan klasik dingin, sejuk dan panas ... 37
24. Gambar 2-24. Tahapan proses dalam logika fuzzy[10] ... 39
25. Gambar 2-25. Fungsi keanggotaan variabel masukan suhu_ruangan ... 40
26. Gambar2-26. Metode defusifikasi dengan Height[12]... 43
27. Gambar 2-27 Arsitektur pengendali Fuzzy[11,13]... 44
28. Gambar 2-28. Arsitektur umum sistem pengendali fuzzy [11,13]... 45
29. Gambar 2-29. Aturan-aturan kendali untuk pengendali fuzzy sederhana secara umum[11,13]..………. 46
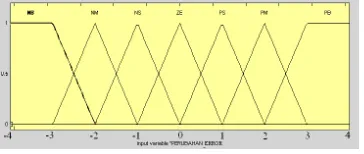
30. Gambar 2-30 Membership input error dengan 7 membership(en) ….. 47
31. Gambar 2-31 Membership input perubahan error dengan 7 membership (Cen) ……… 47
32. Gambar 2-32 Membership output dengan 7 membership ( u) ……… 48
33. Gambar 2-33 Contoh proses fusifikasi dan defusifikasi ……….. 49
34. Gambar 2-34 Kurva tanggapan tangga satuan menunjukkan td, tr, Mp, dan ts ……… 51
35. Gambar 3-1 Diagram blok rancangan ……… 52
36. Gambar 3-2 Rancangan blok diagram closed loop pengendali yang digunakan ……….. 54
38. Gambar 3-4 Rancangan rangkaian penguat non-inverting sebagai buffer
untuk sensor suhu ……….. 55
39. Gambar 3-5 Rancangan rangkaian penguat non-inverting sebagai buffer
pada output untuk mengendalikan penguat daya ……….. 56
40. Gambar 3-6 Rancangan rangkaian penguat non-inverting sebagai buffer
pada output untuk mengendalikan driver kipas ……… 56
41. Gambar 3-7 (a) Rancangan rangkaian opto-coupler, (b) bidang untuk
memantukan dan menyerap cahaya ……….. 57
42. Gambar 3-8 Rancangan rangkaian komparator ……… 58
43. Gambar 3-9 Rancangan rangkaian Precision Frequency-to-Voltage
Converter dengan 2 pole ….. ……… 59
44. Gambar 3-10 Rancangan rangkaian driver kipas DC ... 60
45. Gambar 3-11 (a) Karakteristik Output MOSFET seri IRF740, (b)
Rancangan rangkaian penguat daya menggunakan MOSFET ……….. 61
46. Gambar 3-12 Rancangan rangkaian antarmuka mikrokontroler
ATmega8535 dengan HD44780 ... 62
47. Gambar 3-13 Rancangan rangkaian antarmuka mikrokontroler
ATmega8535 dengan keypad ... 63
48. Gambar 3-14 Diagram alir kerangka utama program ... 64
49. Gambar 3-15 Diagram alir tampilan awal pada LCD ... 65
50. Gambar 3-16 (a) Contoh tampilan identitas penulis, (b)Contoh tampilan
LCD menunggu input dari keypad ……… 65
52. Gambar 3-18 Diagram alir Pengolahan Data ……….. 67
53. Gambar 3-19 (a) contoh tampilan keluaran sensor pada LCD, (b) contoh tampilan jika setpoint dipanggil ……… 68
54. Gambar 3-20 Diagram alir subrutin baca ADC ………. 68
55. Gambar 3-21 Diagram alir fuzzy ……….. 69
56. Gambar 3-22 Diagram alir keypad ……… 70
57. Gambar 3-23 Membership error dan perubahan error ……….. 71
58. Gambar 3-24 Membership output yang digunakan untuk suhu ………. 71
59. Gambar 3-25 Membership output yang digunakan untuk kipas ……… 71
60. Gambar 3-26 Diagram alir program utama untuk visual basic 6.0 ……. 72
61. Gambar 3-27 (a) Diagram alir program interupsi timer mengambil data dari serial, (b) Diagram alir program interupsi timer untuk menyimpan data ke exel, (c) Diagram alir program interupsi timer untuk menghitung berapa kali mikrokontroller mengirimkan data per-detik ... 73
62. Gambar 3-28 (a) Diagram alir interupsi commond button”mulai”, (b) Diagram alir interupsi commond button”berhenti”, (c) Diagram alir interupsi commond button”selesai”, (d) Diagram alir interupsi commond button”back”, (e) Diagram alir interupsi commond button”refresh”, (f) Diagram alir interupsi commond button”simpan” ... 74
63. Gambar 3-29 Rencana tampilan Form eksekusi Visual Basic 6.0 ……. 75
64. Gambar 3-30 (a) Diagram alir interupsi commond button”mulai” , (b) Diagram alir interupsi commond button”Keluar” ... 76
66. Gambar 3-32 Diagram alir menampilkan data ke Visual Basic 6.0 …. 77
67. Gambar 4-1 Bentuk plant yang digunakan ……… 79
68. Gambar 4-2 Grafik output suhu model ruangan dengan set point suhu =
18°C dengan kecepatan kipas1000 rpm (resolusi waktu =200mS) ….. 80
69. Gambar 4-3 Grafik output suhu model ruangan dengan set point suhu =
20°C dengan kecepatan kipas1000 rpm (resolusi waktu =200mS)…… 81
70. Gambar 4-4 Grafik output suhu model ruangan dengan set point suhu =
25°C dengan kecepatan kipas1000 rpm (resolusi waktu =200mS).….. 81
71. Gambar 4-5 Grafik output suhu model ruangan dengan set point suhu =
18°C dengan kecepatan kipas 800 rpm (resolusi waktu =200mS)…… 82
72. Gambar 4-6 Grafik output suhu model ruangan dengan set point suhu =
20°C dengan kecepatan kipas 800 rpm (resolusi waktu =200mS)..….. 82
73. Gambar 4-7 Grafik output suhu model ruangan dengan set point suhu =
20°C dengan kecepatan kipas 800 rpm (resolusi waktu =200mS)…… 83
74. Gambar 4-8 Grafik tangapan sistem yang diberi gangguan (setpoint suhu =
18°C dengan kecepatan kipas = 1000 rpm)………... 85
75. Gambar 4-9 Grafik tangapan sistem yang diberi gangguan (setpoint suhu =
20°C dengan kecepatan kipas = 1000 rpm)……… 85
76. Gambar 4-10 Grafik tangapan sistem yang diberi gangguan (setpoint suhu
= 25°C dengan kecepatan kipas = 1000 rpm)……… 86
77. Gambar 4-11 Hasil tampilan pada LCD (a) Tampilan LCD saat supply
diberi input dari keypad, (d) Tampilan LCD saat program pertama kali
melakukan proses pengolahan data, (e) Tampilan LCD untuk sensor.. 87
78. Gambar 4-12 Tampilan Form Pembuka………. 88
79. Gambar 4-13 Tampilan Form eksekusi……….. 89
80. Gambar 4-14 Contoh data yang disimpan di komputer pada alamat
“E:\skripsiku\data\data1” dengan nama file “da1” dalam format excel. 89
81. Gambar 4-15 Contoh data yang disimpan pada microsoft exel 2007… 90
82. Gambar 4-16 Grafik output kecepatan kipas dc sebagai blower dengan set
point = 1000 rpm (resolusi waktu =200mS)……….. 92
83. Gambar 4-17 Grafik output kecepatan kipas dc sebagai blower dengan set
point = 900 rpm (resolusi waktu =200mS)……… 93
84. Gambar 4-18 Grafik output kecepatan kipas dc sebagai blower dengan set
point = 800 rpm (resolusi waktu =200mS)……….... 94
85. Gambar 4-13 (a) dan (b) Keluaran pengkondisi sinyal terhadap masukan
DAFTAR TABEL
1. Tabel 2-1 Beberapa Setting Kondisi yang Menyebabkan Interupsi
Eksternal1[7]... 15 2. Tabel 2-2 Beberapa Setting Kondisi yang Menyebabkan Interupsi
Eksternal 2[7]... 15 3. Tabel 2-3 Konfigurasi bit clock select untuk memilih sumber
clock[7]……….. 16 4. Tabel 2-4 Konfigurasi bit clock select untuk memilih sumber
clock[7]….………. 17 5. Tabel 2-5 Konfigurasi bit clock select untuk memilih sumber
clock[7]……….. 17 6. Tabel 2-6 Beberapa setting kondisi untuk memilih tegangan
referensi[7]……… 18 7. Tabel 2-7 Beberapa setting untuk memilih frekuensi ADC[7]... 20 8. Tabel 2.8 UCSRA (USART Control and Status Register A)[7].….….. 21 9. Tabel 2.9 UCSRB (USART Control and Status Register B)[7]……… 22 10. Tabel 2.10 UCSRC (USART Control and Status Register C)[7]….…. 24 11. Tabel 2.11 Penentuan Mode Paritas[7]………..…… 24 12. Tabel 2.12 Konfigurasi Pin dan Nama Sinyal Konektor Serial DB-9
15. Tabel 2-15 Aturan-aturan kendali fuzzy secara umum[11] ……… 48 16. Tabel 3-1 Hasil pengujian driver kipas……….. 60 17. Tabel 3.2 Keluran keypad yang diterjemahkan oleh mikrokontroler.. 62 18. Tabel 4-1 Data perbandingan nilai td,tr,tp,ts,Mp dan SSE dengan
kecepatan kipas 800 rpm dan 1000rpm………. 83 19. Tabel 4.2 Hasil pengujian terhadap pengkondisi sinyal yang akan
digunakan ……….. 91 20. Tabel 4.3 Hasil pengujian tegangan keluaran ke penguat daya …….... 91 21. Tabel 4.5 Data pengukuran driver kipas ………..…. 94 22. Tabel 4.4 Hasil pengujian Frequency-to-Voltage Converters Penguat Daya
……….... 95 23. Table 4.6 Hasil pengujian keluaran penguat daya (Supply 24V dan beban =
DAFTAR LAMPIRAN
1. LAMPIRAN RANGKAIAN LENGKAP……….. L1
2. LAMPIRAN LISTING PROGRAM………. L2
3. LAMPIRAN DATA SHEET………. L3
BAB I
PENDAHULUAN
1.1 Judul
Model Pengontrol Suhu Ruangan dengan Pengendali Logika Fuzzy (Air Conditioning Model With Fuzzy Logic Controller).
1.2 Latar Belakang Masalah
Pendingin ruangan cukup sering digunakan dalam kehidupan sehari-hari.
Pendingin ruangan mengandung klor (Cl) seperti freon atau CFC
(Chlorofluorocarbon). Zat tersebut ternyata tidak ramah lingkungan[1]. Zat-zat tadi dapat merusak lapisan ozon di atmosfer bumi dan berdampak pemanasan
global.
Untuk membuat sistem pendingin dengan langsung memanfaatkan energi
listrik tanpa harus memakai bahan pendingin dapat dilakukan dengan cara
membuat termoelektrik.
Termoelektrik efek Peltier yang ditemukan Jean Charles Athanase Peltier pada tahun 1834 kemudian dinamakan efek Peltier.
Salah satu kelebihan lain dari refrigerator jenis ini adalah selain ramah
lingkungan, juga tidak berisik dan dapat dibuat dalam ukuran yang kecil.
Namun timbul permasalahan yaitu Pendingin Peltier bekerja pada prinsip
sedangkan sistem peltier juga menghasilkan panas sehingga juga diperlukan
heatsink dan fan untuk sistem peltier.
Kelebihan yang dimiliki oleh kontroler dengan logika fuzzy adalah mudah diperbaiki, dan yang lebih penting lagi memberikan pengendalian yang sangat
baik serta murah [3]. Dalam perspektif yang lebih luas, pengendali fuzzy ternyata sangat bermanfaat pada aplikasi-aplikasi sistem identifikasi dan pengendalian ill-structured, dengan linieritas dan invariansi waktu tidak bisa ditentukan dengan pasti, karakteristik proses mempunyai faktor lag, dan dipengaruhi oleh derau acak. Bentuk sistem seperti ini jika dipandang sistem konvensional sangat sulit untuk
dimodelkan.
Saat ini logika fuzzy telah berhasil menerobos kendala-kendala yang dulu pernah ditemui dan segera menjadi basis teknologi tinggi. Penerapan teori logika
ini dianggap mampu menciptakan sebuah revolusi dalam teknologi. Sebagai
contoh, mulai tahun 90-an para manufaktur industri yang bergerak di bidang
Distributed Control System (DCSs), Programmable Controllers (PLCs), dan
Microcontrollers (MCUs) telah menyatukan sistem logika fuzzy pada barang produksi dan memiliki prospek ekonomi yang baik. Pada saat yang bersamaan,
pertumbuhan yang luar biasa terjadi pada industri perangkat lunak yang
menawarkan kemudahan penggunaan logika fuzzy dan penerapan logika fuzzy
pada setiap aspek kehidupan sehari-hari.
Pada penelitian sebelumnya sudah pernah dilakukan penelitian oleh
penulis mengenai pengunaan model pengontrol suhu ruangan dengan kontroler
penelitian sebelumnya hasil yang diperoleh masih belum baik, karena pada
penelitian sebelumnya masih deperoleh steady state error sebesar 4,42%-9,03% dengan overshoot sebesar 11.06% - 32.5%[4]. Sehingga pada penelitian ini akan memperbaiki hasil penelitian yang sebelumnya. Pada penelitian ini suhu yang
diatur hanya pada suhu 18°C-25°C.
1.3 Tujuan dan Manfaat:
Tujuan penelitian ini adalah menghasilkan Model pengontrol suhu ruangan
dengan menggunakan kontroler fuzzy. Manfaat yang akan dicapai adalah:
1. Untuk masyarakat umum
Masyarakat akan memperoleh suatu pendingin ruangan yang stabil dan
mudah dalam perbaikan dan perawatan, serta ramah lingkungan.
2. Untuk perkembangan ilmu pengetahuan
a. Menambah literatur aplikasi bersama antara devais, elektronika
analog, elektronika digital dan mikrokontroler.
b. Menambah satu aplikasi dari kontroller fuzzy.
1.4 Batasan Masalah :
Pembahasan perancangan model pengontrol suhu ruangan dengan logika
fuzzy lebih difokuskan dalam batasan-batasan masalah sebagai berikut:
2. Jumlah Membership 7.
3. Bahasa pemprogaman menggunakan AVR GCC bawaan dari AVR
studio4 dengan kompiler WinAVR.
4. Sistem mengontrol kecepatan putaran kipas dan suhu ruangan
5. Suhu ruangan dibatasi pada suhu 18-25°C
6. Kecepatan kipas dibatasi pada 800-1000 rpm.
7. Input berupa nilai suhu dan kecepatan kipas yang diinginkan
8. Output berupa tampilan suhu ruangan dan kecepatan putaran kipas dengan
LCD
9. Ukuran model 30x20x30 cm untuk bagian luar dan 25x15x25 cm untuk
bagian dalam.
10.Sensor yang digunakan adalah LM35 sebagai sensor suhu dan
optocoupler sebagai sensor kecepatan kipas.
11.Pendingin menggunakan termoelektrik dan kipas DC.
12.Program VB 6.0 hanya sebagai program bantuan untuk menyimpan data.
13.Pengujian gangguan dilakukan dengan membuka pintu model ruangan
selama 10 detik.
1.5 Metodologi Penelitian
Metode yang digunakan dalam penelitian ini adalah mengumpulkan
sejumlah referensi atau literatur dari perpustakaan, internet dan sebagainya,
kemudian menyusun perancangan dan melakukan serangkaian percobaan untuk
Pengujian dilakukan dengan memberikan gangguan pada sistem dengan
cara membuka dan menutup pintu pada model, mengambil data melalui sensor
dan menganalisis bagaimana kontrol fuzzy menangani gangguan yang diberikan. Hasil yang ingin dicapai dari penelitian ini adalah menghasilkan suatu
kontroller fuzzy yang handal dan bisa memberikan pengendalian yang sangat baik untuk mengontrol suhu ruangan, serta memperbaiki hasil penelitian sebelumnya.
1.6 Sistematika Penulisan
Tugas akhir ini memiliki sistematika penulisan sebagai berikut:
BAB I : PENDAHULUAN
BAB ini berisi latar belakang penelitian, tujuan dan manfaat penelitian,
batasan masalah, metodologi penelitian dan sistematika penulisan.
BAB II : DASAR TEORI
BAB ini berisi studi pustaka tentang landasan teori penelitian:
termoelektrik, mikrokontroler Atmega8535, rangkaian elektronika yang
digunakan, Visual Basic 6.0, sistem kendali fuzzy dan tanggapan transien. BAB III : RANCANGAN PENELITIAN
BAB ini berisi tentang diagram blok perancangan, perancangan perangkat
keras (hardware) dan perancangan perangkat lunak (software) dari peralatan yang akan dibuat.
BAB IV : HASIL DAN PEMBAHASAN
BAB ini berisi hasil perancangan perangkat keras, data hasil pengujian,
BAB V: KESIMPULAN DAN SARAN
BAB ini berisi tentang kesimpulan akhir dan saran-saran penulis tentang
BAB II
DASAR TEORI
2.1. Termoelektrik
Termoelektrik merupakan sebuah fenomena terjadinya perubahan
sifat-sifat termodinamika menjadi sifat-sifat-sifat-sifat elektrik dan sebaliknya[1]. Dua buah
batang dari bahan logam yang berbeda disambungkan pada kedua ujungnya
sehingga membentuk sebuah rangkaian tertutup. Ketika salah satu ujung
dipanaskan maka pada rangkaian tertutup tersebut akan mengalir arus. Fenomena
ini dinamakan efek Seebeck, karena ditemukan oleh Thomas Seebeck pada tahun
1821.
Begitu pula bila dilakukan hal yang sebaliknya, yaitu jika rangkaian
tertutup dari dua batang logam berbeda bahan yang disambungkan tersebut
dialirkan arus listrik. Pada salah satu ujung sambungan akan menyerap kalor,
sehingga menjadi hangat dan pada ujung sambungan lainnya akan terasa dingin.
Fenomena ini ditemukan Jean Charles Athanase Peltier pada tahun 1834, sehingga
dinamakan efek Peltier.
Efek Peltier inilah yang menjadi dasar bagi refrigerator termoelektrik.
Dengan menempatkan ujung dari sambungan yang menyerap kalor pada ruang
yang akan didinginkan, maka ruang tersebut lama-kelamaan akan menjadi dingin
akibat kalor dipindahkan ke tempat lain hanya menggunakan energi elektrik tanpa
Salah satu rangkaian refrigerator termoelektrik adalah dengan
menggunakan bahan semikonduktor. Penggunaan bahan semikonduktor tipe-p dan
tipe-n adalah untuk memperluas permukaan dari tempat penyerapan dan pelepasan
kalor dapat dilihat pada gambar 2-1 dan gambar 2-2.
Gambar 2-1 Efek peltier yang terjadi pada rangkaian tertutup dari dua batang logam berbeda bahan.
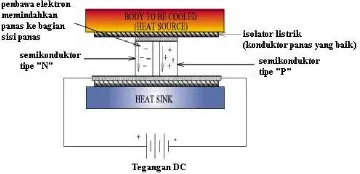
Gambar 2-2 Potongan melintang sambungan termoelektrik dengan
sepasang semikonduktor tipe “P” dan tipe “N”
Ketika elektron berpindah dari bahan tipe P ke bahan tipe N melalui suatu
sambungan elektrik, elektron melompat ke energi yang lebih tinggi dengan
menyerap energi panas (pada sisi dingin). Secara berlanjut melalui kisi-kisi bahan,
elektron mengalir dari bahan tipe N ke bahan tipe P melalui suatu sambungan
elektrik, sambil melepaskan keadaan energi panas yang melemah ke bagian sisi
2.2 Rangkaian Elektronis
2.2.1 Penguat Non-Inverting
Untuk memperbesar suatu sinyal yang kecil tanpa mengubah fasanya,
maka diperlukan suatu rangkaian penguat non-inverting, Rangkaian ini
ditunjukkan pada gambar 2-3.
Gambar 2-3 Penguat non-inverting
Nilai tegangan keluaran (Vout) dapat dirumuskan sebagai berikut[5,6]:
Vout = (1+
R Rf
) vin (2.1)
Dengan penguatan tegangan (Av) sebagai berikut:
Av = (1+
R Rf
) (2.2)
2.2.2 Komparator
Ketika masukan lebih tinggi daripada suatu batasan tertentu, keluaran
komparator tinggi. Bila masukan berada di bawah batasan lain (batas bawah),
maka keluarannya rendah. Rangkaian ini disebut komparator karena keluarannya
akan berubah bila nilai masukannya lebih tinggi atau lebih rendah dari Vref nya.
Gambar 2-4 Komparator
Nilai tegangan keluaran (Vout) dapat dirumuskan sebagai berikut [5,6]:
in
V > Vref maka Vout = +Vsat (2.3)
in
V < Vref maka Vout = -Vsat (2.4)
in
V = Vref maka Vout = 0 (2.5)
2.2.3 Frequency-to-Voltage Converters
Frequency-to-Voltage Converters digunakan untuk mengubah sinyal
berupa frekuensi menjadi sinyal DC. Frequency-to-Voltage Converters
menggunakan rangkaian denganIC LM331 yang bekerja dengan supply 4.5-15V.
mampu mengkonversi sinyal frekuensi hingga 10KHz. Rangkaian frekuensi yang
umum menggunakan IC LM331 dapat dilihat pada gambar 2-5.
Keluran tegangan dapat dirumuskan sebagai berikut [18]:
Vout = -fin . 2,09V .
s L R R
. (Rt . Ct) (2.6)
2.2.4 Sensor Suhu LM35
Sensor suhu memiliki kemampuan untuk mengetahui suhu ruangan dalam
skala °C dengan keluaran tegangan 10mV untuk setiap °C. Dapat bekerja dengan
supply 4-35V. Rentang suhu yang mampu diukur oleh sensor adalah dari -5°C s/d
150°C [19].
2.2.5 Opto-Couple
Opto-couple merupakan sensor yang biasanya terdiri dari LED IR dan
fototransistor[20]. Bekerja dengan mendeteksi ada tidaknya cahaya IR yang mengenai
fototransistor.
2.2.6Transistor Konfigurasi Darlington
Transistor konfigurasi darlington ini digunakan untuk memperoleh yang
besar, sehingga dengan arus (IB) yang kecil transistor dapat menarik arus(IC)
yang besar. Transistor konfigurasi darlington ditunjukkan oleh gambar 2-10.
Dengan IB yang kecil diperoleh IC yang besar sehingga transistor
konfigurasi darlington ini dapat digunakan sebagai saklar untuk mengendalikan
kecepatan putaran kipas yang dapat dikontrol menggunakan PWM.
Gambar 2-6 Transistor dengan konfigurasi dharlington[6]
2.2.7MOSFET Sebagai Saklar
Rangkaian MOSFET sebagai saklar ditunjukkan oleh gambar 2.16.
Gambar 2-7 Rangkaian MOSFET sebagai switching
. MOSFET mampu menangani arus dan tegangan yang lebih besar
dibandingkan dengan transistor biasa dan hampir tidak diperlukannya arus pada
Gate untuk dapat bekerja, karena besarnya ID dipengaruhi oleh besarnya VGS. Jika
digunakan sebagai saklar, maka besarnya ID dibatasi oleh besarnya beban, dengan
IDL maksimal adalah:
IDL =
RL VCC
2.3. Mikrokontroler AVR Seri ATmega8535
2.3.1 Gambaran Umum
Mikrokontroller AVR Seri ATmega8535 memiliki arsitektur Reduced
Instruction Set Computing (RISC) 8 bit, dimana semua instruksi dikemas dalam
kode 16-bit (16-bits word) dan sebagian intruksi dieksekusi dalam satu siklus
clock[7].
2.3.2 Fitur ATmega8535[7]
Kapabilitas detail dari ATmega8535 adalah sebagai berikut :
a. Mikrokontroler AVR berkemampuan tinggi.
b. Didesain berdaya rendah dan semua operasi bersifat statis.
c. Memoryflash sebesar 8K – bytes.
d. EEPROM sebesar 512 bytes.
e. SRAM internal sebesar 512 bytes.
f. Dua buah timer / counter 8 – bit.
g. Satu buah timer / counter 16 – bit.
h. PWM (Pulse Width Modulation) sebanyak 4 (empat) kanal (channels).
i. ADC (Analog – to – Digital Converter) internal dengan fidelitas 10 –
bit sebanyak 8 channels.
j. Portal komunikasi serial (USART)
k. Analogcomparatorinternal.
m. Tegangan operasi 2,7-5,5V (untuk ATmega8535L) dan 4,5-5,5V
(untuk ATmega8535).
n. Kecepatan maksimal 16 MHz.
o. Antarmuka SPI.
p. Unit interupsi internal dan eksternal.
q. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C dan Port D
r. ATmega8535terdiri dari 40-pin PDIP, 44-lead TQFP dan 44-pad MLF.
2.3.3 Peta Memori
AVR ATMega memiliki ruang pengalamatan memori data dan memori
progaram yang terpisah[7]. Memori data terbagi menjadi 3 bagian, yaitu 32 buah
register umum, 64 buah register I/O, yaitu $00 sampai $1F, dan 512 byte SRAM
Internal.
2.3.4 Interupsi
Interupsi adalah kondisi yang membuat CPU berhenti dari rutinitas yang
sedang dikerjakan (rutin utama) untuk mengerjakan rutin lain (rutin interupsi). Di
dalam AVR ATmega sendiri memiliki 21 sumber interupsi internal dan
eksternal[7].
Pada AVR terdapat 3 pin untuk interupsi eksternal, yaitu INT0, INT1, dan
INT2. Interupsi eksternal dapat dibangkitkan apabila terdapat perubahan logika 0
interupsi eksternal diatur oleh register MCUCR (MCU Control Register) yang
terlihat seperti gambar 2-8.
Gambar 2-8 Register MCUCR[7]
Tabel 2-1 Beberapa Setting Kondisi yang Menyebabkan Interupsi Eksternal1[7]
ISC11 ISC10 DESKRIPSI
0 0 Logika 0 pada pin INT1 menyebabkan interupsi 0 1 Perubahan logika pada pin INT1 menyebabkan
interupsi
1 0 Perubahan kondisi 1 ke 0 pada pin INT1 menyebabkan interupsi
1 1 Perubahan kondisi 0 ke 1 pada pin INT1 menyebabkan interupsi
Tabel 2-2 Beberapa Setting Kondisi yang Menyebabkan Interupsi Eksternal 2[7]
ISC01 ISC00 DESKRIPSI
0 0 Logika 0 pada pin INT0 menyebabkan interupsi 0 1 Perubahan logika pada pin INT0 menyebabkan
interupsi
1 0 Perubahan kondisi 1 ke 0 pada pin INT0 menyebabkan interupsi
1 1 Perubahan kondisi 0 ke 1 pada pin INT0 menyebabkan interupsi
Pemilihan pengaktifan interupsi eksternal diatur oleh register GIRC (General
Interrupt Control Register) yang terlihat seperti gambar 2-9:
Bit penyusun register GICR dapat dijelaskan sebagai berikut :
a. Bit INT1 = 1 maka interrupt eksternal 1 aktif.
b. Bit INT0 = 1 maka interrupt eksternal 0 aktif.
c. Bit INT2 = 1 maka interrupt eksternal 2 aktif.
2.3.5 Timer /Counter
AVR ATmega8535 memiliki tiga buah timer, yaitu Timer / Counter 0 (8 bit),
Timer / Counter 1 (16 bit), Timer / Counter 2 (8 bit).
a. Timer / Counter 0
Pengaturan diatur oleh TCCR0 (Timer / Counter Control Register0) yang
dapat dilihat pada gambar 2-10 dan tabel 2-4.
Gambar 2-10 Register TCCR0[7]
Tabel 2-3 Konfigurasi bit clock select untuk memilih sumber clock[7]
CS02 CS01 CS00 Description
0 0 0 Timer / Counter berhenti (tidak aktif) 0 0 1 Clock tanpa prescaling
0 1 0 Clock / 8 0 1 1 Clock / 64 1 0 0 Clock / 256 1 0 1 Clock / 1024
1 1 0 Sumber clock berasal dari pin T0. clock dengan falling edge
1 1 1 Sumber clock berasal dari pin T0. clock dengan rising edge
b. Timer / Counter 1
Pengaturan diatur oleh TCCR1B (Timer / Counter Control Register 1B)
Gambar 2-11 Register TCCR1B[7]
Tabel 2-4 Konfigurasi bit clock select untuk memilih sumber clock[7]
CS12 CS11 CS10 Description
0 0 0 Timer / Counter berhenti (tidak aktif) 0 0 1 Clock tanpa prescaling
0 1 0 Clock / 8 0 1 1 Clock / 64 1 0 0 Clock / 256 1 0 1 Clock / 1024
1 1 0 Sumber clock berasal dari pin T1. clock dengan falling edge
1 1 1 Sumber clock berasal dari pin T1. clock dengan rising edge
c. Timer / Counter 2
Pengaturan diatur oleh TCCR2 (Timer / Counter Control Register2) yang
dapat dilihat pada gambar 2-12 dan tabel 2-6
Gambar 2-12 Register TCCR2[7]
Tabel 2-5 Konfigurasi bit clock select untuk memilih sumber clock[7]
CS22 CS21 CS20 Description
0 0 0 Timer / Counter berhenti (tidak aktif) 0 0 1 Clock tanpa prescaling
0 1 0 Clock / 8 0 1 1 Clock / 32 1 0 0 Clock / 64 10 0 1 Clock / 128
2.3.6 ADC (Analog To Digital Converter)
Proses inisialisasi ADC meliputi proses penentuan clock, tegangan
referensi, format output data, dan mode pembacaan. Register yang perlu diset
nilainya adalah ADMUX (ADC Multiplexer Selection Register), ADCSRA (ADC
Control and Status Register A), dan SFIOR (Special Function IO Register).
ADMUX merupakan register 8 bit yang berfungsi menentukan tegangan
referensi ADC, format data Output, dan saluran ADC yang digunakan.
Konfigurasinya seperti gambar 2-13:
Gambar 2-13 Register ADMUX[7]
Bit penyusunnya dapat dijelaskan sebagai berikut:
a. REFS[1..0] merupakan bit pengatur tegangan referensi ADC
ATMega8535.
Tabel 2-6 Beberapa setting kondisi untuk memilih tegangan referensi[7]
REFS[1..0] Mode tegangan referensi 00 Berasal dari pin AREF
01 Berasal dari pin AVCC 10 Tidak digunakan
11 Berasal dari tegangan referensi internal sebesar 2,56V
b. ADLAR merupakan bit pemilih mode data keluaran ADC. Penjelasannya
dapat dilihat pada gambar 2-14 dan gambar 2-15:
Gambar 2-15 Format data ADC dengan ADLAR=1 [7]
c. MUX[4..0] merupakan bit pemilih saluran pembacaan ADC. Dengan nilai
awal 00000 , maka bila nilai MUX tidak diubah secara otomatis kanal
ADC yang dipilih adalah ADC0, sedangkan untuk pemilihan kanal yang
lain dilakukan dengan mengubah settingan MUX.
d. ADCSRA merupakan register 8 bit yang berfungsi melakukan manajemen
sinyal kontrol dan status dari ADC. ADCSRA memiliki susunan seperti
gambar 2-16.
Gambar 2-16 Register ADCSRA [7]
Bit penyusunnya dapat dijelaskan sebagai berikut:
a. ADEN merupakan bit pengatur aktivasi ADC. Bernilai awal 0. Jika
bernilai 1, maka ADC aktif.
b. ADSC merupakan bit penanda mulainya konversi ADC. Bernilai awal 0
selama konversi ADC akan bernilai 1, sedangkan jika konversi telah
selesai, akan berniai 0.
c. ADATE merupakan bit pengatur aktivasi picu otomatis operasi ADC.
Bernilai awal 0. Jika berjilai 1, operasi konversi ADC akan dimulai pada
saat transisi positif dari sinyal picu yang dipilih. Pemilihan sinyal picu
d. ADIF merupakan bit penanda akhir suatu konversi ADC. Bernilai awal 0.
Jika bernilai 1, maka donversi ADC pada suatu saluran telah selesai dan
data siap diakses.
e. ADIE merupakan bit pengatur aktivasi interupsi yang berhubungan dengan
akhir konversi ADC. Bernilai awal 0. Jika bernilai 1 dan jika sebuah
konversi ADC telah selesai, sebuah interupsi akan dieksekusi.
f. ADPS[2..0] merupakan bit pengatur clock ADC. Bernilai awal 000 yang
berarti frekuensi ADC menyelesaikan konversi adalah setengah dari
frekuensi osilator yang digunakan. Sedangkan jika diinginkan frekuensi
yang lebih rendah dapat dilakukan dengan mengubah nilai settingan ADPS
yang dapat dilihat pada tabel 2-7.
Tabel 2-7 Beberapa setting untuk memilih frekuensi ADC [7]
ADPS[2..0] Frekuensi ADC 000 Frekuesi osilator/2 001 Frekuesi osilator/2 010 Frekuesi osilator/4 011 Frekuesi osilator/8 100 Frekuesi osilator/16 101 Frekuesi osilator/32 110 Frekuesi osilator/64 111 Frekuesi osilator/128
2.3.7 Komunikasi Serial ATMega8535
ATMega8535 telah dilengkapi Universal Synchronous and Asynchronous
serial Receiver and Transmitter (USART). Melalui USART dapat dilakukan
USART ATMega8535 memiliki beberapa keuntungan dibandingkan dengan
sistem UART, yaitu :
1. Operasi full duplex
2. Mode operasi asinkron dan sinkron
3. Mendukung komunikasi multiprosesor
4. Mode kecepatan transmisi berorde Mbps
Komunikasi USART dilakukan melalui pin RXD (PD0) dan TXD (PD1)
serta pin XCK (PB0) untuk komunikasi synchronous . Untuk mengontrol USART
digunakan register UCSRA, UCSRB dan UCSRC ( USART Control and Status
Register A,B,C ) dan UBRR ( USART Baud Rate Register ).
UCSRA (USART Control and Status Register A)
• RXC – USART Receive Complete, bit ini akan aktif jika ada data masuk.
• TCX – USART Transmit Complete, bit ini akan aktif pada saat selesai
melakukan pengiriman data.
Tabel 2-8 UCSRA (USART Control and Status Register A)[7]
Bit 7 6 5 4 3 2 1 0 RXC TXC UDRE FE DOR PE U2X MPCM Read/Write R R/W R R R R R/W R/W Initial Value 0 0 1 0 0 0 0 0
• UDRE – USART Data Register Empty, bit ini menandakan transmitter
siap untuk menerima data.
• FE – Framing Error, bit ini akan aktif jika terdapat error saat menerima
• DOR – Data OveRun, bit ini akan aktif jika ada data yang masuk namun
register UDR penuh ( belum dibaca ).
• PE – Parity Error, bit ini akan aktif jika terdapat error parity saat
menerima data.
• U2X – Double USART Transmission Speed, bit ini digunakan untuk
men-doubel kecepatan baud rate.
• MPCM – Multiprocessor Communication Mode
UCSRB (USART Control and Status Register B )
Tabel 2-9 UCSRB (USART Control and Status Register B)[7]
Bit 7 6 5 4 3 2 1 0
RXCIE TXCIE UDRIE RXEN TXEN UCSZ2 RXB8 TXB8
Read/Write R/W R/W R/W R/W R/W R/W R R/W
Initial Value 0 0 0 0 0 0 0 0
UCSRB merupakan register 8 bit pengatur aktivasi penerima dan pengirim
USART.
• RXCIE – USART Receive Complete Interrupt Enable, mengatur aktivasi
interupsi penerimaan data serial. Bernilai awal 0 sehingga proses
penerimaan data berdasar pada sistem pooling. Jika bernilai 1 dan jika bit
RXC pada UCSRA bernilai 1, interupsi penerimaan data serial akan
dieksekusi.
• TXCIE – USART Transmit Complete Interrupt Enable, mengatur
aktivasi interupsi pengiriman data serial. Bernilai awal 0. Jika bernilai 1
dan jika bit pada TXC pada UCSRA bernilai 1, interupsi pengiriman data
• UDRIE – USART Data Register Empty Interrupt Enable, mengatur
aktivasi interupsi yang berhubungan dengan kondisi bit UDRE pada
UCSRA. Bernilai awal 0. Jika bernilai 1 maka interupsi akanterjadi hanya
jika bit UDRE bernilai 1.
• RXEN – Receive Enable, merupakan bit aktivasi penerima serial ATMega
8535. Bernilai awal 0. Jika bernilai 1, maka penerima data serial
diaktifkan.
• TXEN – Transmitt Enable, merupakan bit aktivasi pengirim serial
ATMega 8535. Bernilai awal 0. Jika bernilai 1, maka pengirim data serial
diaktifkan.
• UCSZ2 – Character Size, bersama dengan bit UCSZ1 dan UCSZ0 di
register UCSRC menentukan ukuran karakter serial yang dikirimkan. Pada
saat awal, ukuran karakter diset pada 8 bit.
• RXB8 – Receive Data Bit 8, menampung bit ke 8 pada penerimaan 9-bit.
• TXB8 – Transmit Data Bit 8
UCSRC (USART Control and Status Register C )
UCSRC merupakan register 8 bit yang digunakan untuk mengatur mode dan
kecepatan komunikasi serial yang dilakukan.
• URSEL – Register Select, merupakan bit pemilih akses antara UCSRC
dan UBRR karena memiliki alamat yang sama. Bernilai awal 1 sehingga
Tabel 2-10 UCSRC (USART Control and Status Register C)[7]
Bit 7 6 5 4 3 2 1 0
URSEL UMSEL UPM1 UPM0 USBS UCSZ1 UCSZ0 UCPOL
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 1 1 0
• UMSEL – USART Mode Select, merupakan bit pemilih mode
komunikasi serial antara sinkron dan asinkron. Bernilai awal 0 sehingga
modenya asinkron. Jika bernilai 1, maka modenya sinkron.
• UPM 1:0 – Parity Mode, merupakan bit pengatur paritas. Bernilai awal 00
sehingga paritas tidak dipergunakan. Detail nilainya dapat dilihat pada
table berikut :
Tabel 2-11 Penentuan Mode Paritas[7]
UPM 1 : 0 Mode Paritas 00 Tidak aktif 01 Tidak digunakan 10 Paritas genap 11 Paritas ganjil
• USBS – Stop Bit Select, merupakan bit pemilih ukuran bit stop. Bernilai
awal 0 sehingga jumlah bit stop yaitu 1 bit. Jika bernilai 0, maka jumlah
bit stop yaitu 2 bit.
• UCSZ1 dan UCSZ0 merupakan bit pengatur jumlah karakter serial.
• UCPOL – Clock Polarity, merupakan bit pengatur hubungan antara
perubahan data keluaran dan data masukan serial dengan clock
sinkronisasi. Hanya berlaku pada mode sinkron. Untuk mode asinkron, bit
Proses membangun hubungan komunikasi data serial memerlukan suatu
kecepatan data (data transfer rate ) yang sesuai, baik di sisi computer maupun di
sisi mikrokontroller. Ada beberapa hal yang perlu diperhatikan untuk membangun
hal tersebut di mikrokontroler, yaitu nilai baud rate yang dipergunakan, seting
format data stop bit, dan pengaturan beberapa register seperti : RXEN, TXEN, dan
RXCIE. Pengaturan baud rate dilakukan dengan memberikan nilai pada register
UBRR. Register UBRR adalah register 16 bit sehingga terdiri dari UBRRH
(UBRR High) dan UBRRL (UBRR Low). Rumus yang dipergunakan adalah :
Nilai UBRR = (Frekuensi_kristal / (16 * baud_rate)) – 1 …………...(2.9)
Proses pengiriman data serial dilakukan per byte data dengan menunggu
register UDR yang merupakan tempat data serial akan disimpan menjadi kosong
sehingga siap ditulis dengan data yang baru. Proses tersebut menggunakan bit
yang ada pada register UCSRA, yaitu bit UDRE ( USART Data Register Empty ).
Bit UDRE merupakan indikator kondisi register UDR. Jika UDRE bernilai 1,
maka register UDR telah kosong dan siap diisi dengan data yang baru.
Proses penerimaan data serial dilakukan dengan mengecek nilai bit RXC (USART
Receive Complete) pada register UCRSA. RXC akan bernilai 1 jika ada data yang
siap dibaca di buffer penerima, dan bernilai 0 jika tidak ada data pada buffer
2.4. LCD HD44780
HD44780 merupakan matriks LCD dengan konfigurasi 16 karakter dan 2
baris. Setiap karakter dibentuk oleh 8x5 atau 10x5 pixel. Gambar 2-17
menunjukkan konfigurasi kaki pada LCD HD44780.
Gambar 2-17 Pin LCD HD44780.
Pin–pin pada LCD HD44780 adalah sebagai berikut:
• Pin 1 (VCC): tegangan +5Volt untuk catu LCD.
• Pin 2 (GND): tegangan 0Volt (ground) modul LCD.
• Pin 3 (VEE/VLCD): tegangan pengatur kontras LCD, maksimum pada
0Volt.
• Pin 4 (RS): Register Select, pin pemilih register yang akan diakses.
1 = akses ke register data
0 = akses ke register perintah
• Pin 5 (R/W): mode baca atau tulis LCD
1 = mode pembacaan
• Pin 6 (E): pin untuk mengaktifkan clock LCD.
• Pin 7-14 (D0-D7): jalur bus data.
• Pin 15 (Anoda): tegangan positif backlight modul LCD sekitar 4,5Volt.
• Pin 16 (Katoda): tegangan negatif backlight modul LCD sebesar 0Volt.
2.4.1 Proses Menampilkan Karakter di LCD
Untuk menampilkan karakter di LCD dilakukan dengan mengirimkan
kode ASCII melalui jalur bus data. Jalur bus data dapat menggunakan 8bit atau
hanya 4 bit saja. Jika menggunakan jalur bus data 4bit maka jalur bus data yang
digunakan hanya D7…D4 saja dan dilakukan 2 kali dengan mengirimkan data
nibble high dan nibble low. Proses diawali terlebih dahulu dengan memberikan
logika 1 pada pin RS untuk masuk ke register data dilanjutkan dengan
megirimkan data nibble high dan diikuti dengan memberikan logika 1 dan 0 pada
pin E sebagai clock dan kemudian diikuti dengan mengirimkan data nibble low
dan diulangi kembali dengan memberikan logika 1 dan 0 pada pin E. Sedangkan
untuk memberikan perintah pada LCD dilakukan proses yang sama dengan proses
untuk menampilkan karakter di LCD hanya saja pin RS harus diberi logika 0
untuk masuk ke register perintah.
2.5. Keypad
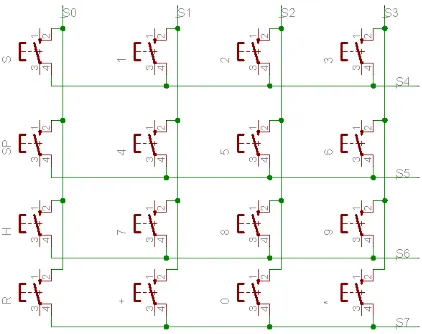
Keypad digunakan sebagaimasukan pada mikrokontroler[16]. Rangkaian
Gambar 2-18 Rangkaian keypad
Prinsip kerja dari rangkaian keypad adalah dengan menggunakan prinsip
skanning dimana S0...S3 sebagai masukan dan S4...S7 sebagai keluaran. S0...S3
diberi masukan secara bergantian dan S4...S7 diperiksa apakah ada keluarannya
atau tidak. Masukan S0...S3 dilakukan secara bergantian, setiap pergantian
masukan maka keluaran akan diperiksa. Jika ada keluaran pada salah satu dari
S4...S7 maka mikrokontroler akan mengolah data tersebut untuk diterjemahkan.
2.6
Komunikasi Serial RS232
RS232 merupakan salah satu standar interface dalam proses transfer data
antar komputer terutama dalam bentuk serial transfer. Standar ini digunakan untuk
interface antara peralatan terminal data dan komunikasi data, dengan
munggunakan data biner sebagai data yang ditransmisi. RS232 adalah suatu data
Serial Data Interface Standart yang dikeluarkan oleh EIA. Standarisasi meliputi
Standar ini juga berisikan karakteristik sinyal listrik, karakteristik mekanik
dan cara operasional rangkaian fungsioanal . Beberapa karakteristik rangkaian
fungsionalnya adalah sebagai berikut :
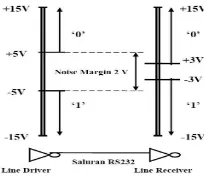
1. Tegangan terbuka maksimum 25 volt.
2. Keadaan logika `1` disebut “mark” ditandai dengan tegangan antara -5
volt sampai dengan - 15 volt.
3. Keadaan logika `0` disebut “space”ditandai dengan tegangan antara +5
volt sampai dengan +15 volt.
4. Hambatan keluaran DC harus dikurangi dari 700 ohm jika diberi tegangan
3 volt dan 15 volt, dan harus lebih besar 3000 ohm jika tegangan kurang
dari 25 volt.
5. Slew rate harus lebih kecil dari 30 volt/detik. Waktu yang dipergunkan
untuk melewati daerah peralihan -3 volt sampai dengan +3 volt tidak boleh
melebihi 1mdetik.
Gambar 2-19 Level Tegangan RS 232[14,15]
Gambar 2-21 Circuit Diagram MAX 232
2.7 Konfigurasi Serial DB-9
Berikut ini adalah konfigurasi pin pada DB-9 yang merupakan konektor
port serial yang biasanya tersedia pada komputer.
Gambar 2-22 Konfigurasi Serial DB-9[14]
Keterangan :
1. Pin 1(Data Carier Detect) berfungsi untuk medeteksi apakah DTE
menerima data atau tidak.
2. Pin2 (Received Data) digunakan DTE untuk menerima data dari DCE
3. Pin3(Transmitted Data) digunakan DTE untuk mengirimkan data ke DCE.
4. Pin4 (Data Terminal Ready) digunakan pada saat DTE memberitahukan
5. Pin5 (Signal Ground) merupakan saluran ground.
6. Pin6 (DCE Ready) berfungsi untuk menunjukan bahwa DCE siap untuk
menerima data.
7. Pin7 (Request To Send) digunakan pada saat DCE diminta mengirimkan
data oleh DTE.
8. Pin8 (Clear To send) digunakan pada saat DCE memberitahukan bahwa
DTE boleh mulai mengirimkan data.
9. Pin9 (Ring Indicator) digunakan pada saat DCE memberitahukan ke DTE
bahwa sebuah stasiun menghendaki hubungan dengannya.
Berikut ini adalah konfigurasi pin dan nama sinyal konektor serial DB-9 :
Tabel 2-12 Konfigurasi Pin dan Nama Sinyal Konektor Serial DB-9[14]
Nomor Pin Nama Sinyal Direction Keterangan
1 DCD In Data Carrier Detect / Received Line Signal Detect
2 RxD In Received Data
3 TxD Out Transmit Data
4 DTR Out Data Terminal Ready
5 GND - Ground
6 DSR In Data Set Ready
7 RST Out Request to Send
8 CTS In Clear to Send
9 RI In Ring Indicator
Untuk dapat menggunakan port serial dalam hal ini COM1 maka perlu
diketahui alamatnya. Base address COM1 biasanya adalah 1016(3F8h). Alamat
tersebut adalah alamat yang biasanya digunakan, tergantung dari komputer yang
register-register yang digunakan untuk komunikasi port serial ini. Berikut adalah
tabel register-register tersebut beserta alamatnya :
Tabel 2-13 Nama Register Beserta Alamatnya[14]
Nama Register Alamat Register
TX Buffer 3F8h
RX Buffer 3F8h
Baud Rate Divisor Latch LSB 3F8h
Baud Rate Divisor Latch MSB 3F9h
Interrupt Enable Register 3F9h
Interrupt Identification Register 3FAh
Line Control Register 3FBh
Modem Control Register 3FCh
Line Status Register 3FDh
Modem Status Register 3FEh
• RX Buffer, digunakan untuk menampung dan menyimpan data dari DCE.
• TX Buffer, digunakan untuk menampung dan menyimpan data yang akan
dikirim ke port serial
• Baud rate Divisor Latch LSB, digunakan untuk menampung byte bobot
rendah untuk pembagi clock pada IC UART agar didapat baud rate yang
tepat.
• Baud rate Divisor Latch MSB, digunakan untuk menampung byte bobot
tinggi untuk pembagi clock pada IC UART.
• Interrupt Enable Register, digunakan untuk menset interupsi apa saja
yang akan dilayani komputer.
• Interrupt Identification Register, digunakan untuk menentukan urutan
• Line Control Register, digunakan untuk menentukan jumlah bit data,
jumlah bit parity, jumlah bit stop.
• Modem Control Register, digunakan untuk mengatur saluran pengatur
modem terutama saluran DTR dan saluran RST.
• Line Status Register, digunakan untuk menampung bit-bit yang
menyatakan keadaan penerimaan atau pengiriman data dan status
kesalahan operasi.
• Modem Status Register, digunakan untuk menampung bit-bit yang
menyatakan status dari saluran hubungan dengan modem.
2.8
Visual Basic
Form utama berupa tampilan menu-menu yang dibuat dengan perangkat
lunak berbasis pada bahasa pemrograman visual basic, komponen yang digunakan
antara lain : Timer, Label, Textbox , dan Comand Button[14,15].
2.8.1 Penggunaan Komponen Timer
Timer adalah komponen pada toolbox yang digunakan untuk memberikan
suatu waktu tunda (delay) terhadap perintah yang dikenakan[15]. Untuk
menggunakan komponen timer langkah yang harus dilakukan adalah :
1. Mengambil komponen timer dari toolbox dan memasangnya pada form yang
digunakan.
2. Memberikan waktu tunda dengan mengisikannya pada properti interval dengan
3. Komponen timer terdapat fasilitas Enable sehingga kita dapat mengeset
mulainya komponen timer.
2.8.2 Penggunaan Komponen Label
Untuk menggunakan komponen Label, langkah – langkahnya adalah:
1. Mengambil komponen Label dari Toolbox dan memasangnya pada form
yang digunakan.
2. Pada properti caption disikan dengan tulisan yang ingin ditampilkan pada
form yang digunakan.
3. Pada properti name dapat disikan nama dari pada komponen tersebut.
4. Komponen Label merupakan komponen visual sehingga dapat diatur
properti visible-nya untuk ditampilkan atau tidak pada form sesuai dengan
kebutuhan yang diinginkan.
2.8.3 Penggunaan Komponen TextBox
Untuk menggunakan komponen Textbox, langkah - langkahnya adalah:
1. Mengambil komponen Textbox dari Toolbox dan memasangnya pada form
yang digunakan .
2. Pada properti caption disikan dengan tulisan yang ingin ditampilkan pada
form yang digunakan.
4. Komponen Textbox merupakan komonen visual sehingga dapat diatur
properti visible-nya untuk ditampilkan atau tidak pada form sesuai dengan
kebutuhan yang diinginkan.
5. Komponen Textbox dapat digunakan untuk memberikan suatu perintah
dengan memberikan input pada Textbox.
2.8.4 Penggunaan Komponen Command Button
Untuk menggunakan komponen Command Botton, langkah – langkahnya
adalah :
1. Mengambil komponen Command Botton dari Toolbox dan memasangnya
pada form yang digunakan.
2. Pada properti caption disikan dengan tulisan yang ingin ditampilkan pada
form yang digunakan.
3. Pada properti name dapat disikan nama dari pada komponen tersebut.
4. Komponen Command Botton merupakan komonen visual sehingga dapat
diatur properti visible-nya untuk ditampilkan atau tidak pada form sesuai
dengan kebutuhan yang diinginkan.
5. Komponen Command Botton dapat digunakan untuk memberikan suatu
perintah dengan menambahkan program pada event-nya.
2.8.5 Pengaksesan dengan menggunakan Kontrol MSComm
Kontrol MSComm menyediakan fasilitas komunikasi antara program
Setiap MSComm hanya menangani satu port serial sehingga jika ingin
menggunakan lebih dari satu port serial, maka harus digunakan juga MSComm
sebanyak port serial yang dipakai. Properti–properti MSComm yang sering
digunakan adalah sebagai berikut :
• CommPort : digunakan untuk menentukan nomor port serial yang akan
dipakai
• Setting : digunakan untuk menset nilai baud rate, pariti, jumlah bit data,
dan jumlah bit stop
• PortOpen : digunakan untuk membuka ataupun menutup port serial yang
dihubungkan dengan MSComm ini
• Input : digunakan untuk mengambil data string yang ada pada buffer
penerima
• Output : digunakan untuk menulis data string pada buffer kirim
2.9. Sistem Kendali Fuzzy
2.9.1 Himpunan Klasik (crisp)
Teori himpunan fuzzy merupakan perluasan dari teori himpunan klasik /
himpunan tegas[8]. Pada teori himpunan klasik, keberadaan suatu elemen pada
suatu himpunan A, hanya akan memiliki 2 kemungkinan keanggotaan, yaitu
menjadi anggota A atau tidak menjadi anggota A. Suatu nilai yang menunjukkan
seberapa besar tingkat keanggotaan suatu elemen (x) dalam suatu himpunan (A),
dinotasikan dengan µA(x). Pada himpunan klasik, hanya ada 2 derajat
keanggotaan, yaitu µA(x)=1 untuk menjadi keanggotaan A; dan µA(x)=0, untuk
tidak menjadi anggota dari A.
Misalkan dimiliki variabel suhu ruangan yang dibagi menjadi 3 kategori yaitu:
Dingin suhu ruangan < 20°C
Sejuk 20°C < suhu ruangan < 35°C
Panas suhu > 35°C
Nilai keanggotaan secara grafis, himpunan Dingin, Sejuk, dan Panas dapat dilihat
pada gambar 2-23.
Gambar 2-23 Himpunan klasik dingin, sejuk dan panas
Pada gambar 2-23 dapat dilihat bahwa:
1. Apabila suhu ruangan 19°C maka suhu ruangan tersebut dikatakan Dingin
(µDINGIN(19) = 1)
2. Apabila suhu ruangan 21°C maka suhu ruangan tersebut dikatakan TIDAK
Dingin (µDINGIN (21) = 0)
3. Apabila suhu ruangan 36°C maka suhu ruangan tersebut dikatakan TIDAK
4. Apabila suhu ruangan 36°C maka suhu ruangan tersebut dikatakan Panas
(µPANAS(36) = 1)
Adanya perubahan kecil saja pada suatu nilai mengkibatkan perbedaan
kategori yang cukup signifikan, sehingga dapat dikatakan bahwa pemakaian
himpunan klasik untuk menyatakan suhu ruangan kurang bijaksana.
Apabila digunakan dalam suatu sistem kendali, misalkan untuk
mengendalikan kecepatan putaran kipas, maka kecepatan putaran kipas akan
berubah-ubah secara liar karena adanya perubahan kecil dari variabel masukan
suhu ruangan[13]. Dengan kondisi yang demikian kendali fuzzy menunjukkan
kelebihan dari himpunan klasik.
2.9.2 Logika Fuzzy
Logika kabur (fuzzy) pertama kali diperkenalkan oleh Prof. Lotfi A. Zadeh dari
University of California di Berkeley pada tahun 1965[8].
Logika fuzzy diimplementasikan dalam empat tahapan :
1. Tahap fusifikasi (fuzzification), yakni pemetaan dari masukan tegas ke
himpunan fuzzy[8].
2. Tahap inferensi, yakni pembangkitan aturan fuzzy[8].
3. Tahap komposisi, yakni mengkombinasikan output yang menyatakan
himpunan fuzzy ke dalam sebuah himpunan fuzzy[10].
4. Tahap defusifikasi (defuzzification), yakni transformasi keluaran dari nilai
Keempat tahapan tersebut dapat digambarkan dalam gambar 2-24.
Gambar 2-24 Tahapan proses dalam logika fuzzy[10]
2.9.3 Fusifikasi (fuzzification)
Pada tahap fusifikasi, nilai masukan nyata terukur dipetakan ke dalam
fungsi keanggotaan fuzzy[8,13]. Sebagai contoh, dalam bahasan berikut
pengendali suhu ruangan dikembangkan dengan metode logika fuzzy.
Untuk membuat sistem kendali suhu ruangan mula-mula dikembangkan
fungsi keanggotaan untuk variabel masukan "suhu_ruangan". Fungsi keanggotaan
ini didefinisikan dengan rentang nilai dan derajat keanggotaan. Dalam logika
fuzzy, penting untuk membedakan tidak hanya dalam fungsi keanggotaan mana
suatu variabel berada tetapi juga derajat keanggotaan relatif variabel tersebut. Jadi
tiap variabel memiliki bobot keanggotaan dalam suatu fungsi keanggotaan. Suatu
variabel dapat memiliki memiliki bobot keanggotaan dalam beberapa fungsi
keanggotaan sekaligus pada suatu saat. Sebagai contoh, fungsi keanggotaan
Gambar 2-25 Fungsi keanggotaan variabel masukan suhu_ruangan
Seperti terlihat pada gambar 2-25, fungsi keanggotaan fuzzy memiliki
rentang nilai-nilai yang dapat saling tumpang-tindih. Dalam diagram tersebut
didefinisikan adanya tiga himpunan nilai keanggotaan untuk variabel
"suhu_ruangan". Ketiga himpunan itu adalah Dingin, Sejuk, dan Panas. Derajat
keanggotaan suatu nilai tertentu, dalam diagram tersebut, adalah titik perpotongan
antara nilai masukan pada sumbu horisontal dengan garis yang mendefinisikan
satu atau lebih fungsi keanggotaan fuzzy. Titik perpotongan ini dinyatakan dengan
nilai tertentu pada sumbu tegak yang menentukan keanggotaan relatif nilai
tersebut di dalam himpunan nilai masukan nyata. Sebagai contoh, nilai 34 pada
variabel suhu_ruangan adalah anggota dari fungsi keanggotaan Panas dengan
keanggotaan relatif 0.8. Nilai 34 tersebut juga adalah anggota dari fungsi
keanggotaan Sejuk dengan keanggotaan relatif 0.19.
Tidak seperti pada sistem klasik, di mana suatu nilai secara tegas dapat
dinyatakan sebagai anggota atau bukan anggota dari suatu fungsi, sistem logika
fuzzy bekerja atas dasar keanggotaan dari suatu himpunan dan derajat keanggotaan
suhu_ruangan pada 34°C adalah lebih condong pada keanggotaan Panas (0.8)
daripada Sejuk (0.19), maka pengendali akan memperhitungkan derajat
keanggotaan Panas tersebut dalam menentukan aksi keluaran yang akan
dilakukan.
2.9.4 Inferensi
Setelah fungsi keanggotaan untuk variabel masukan dan keluarannya
ditentukan, basis aturan pengendalian dapat dikembangkan untuk menghubungkan
aksi keluaran pengendali terhadap kondisi masukannya[8,13]. Tahap ini disebut
sebagai tahap inferensi, yakni bagian penentuan aturan dari sistem logika fuzzy
![Gambar 2-6 Transistor dengan konfigurasi dharlington[6]](https://thumb-ap.123doks.com/thumbv2/123dok/1622308.2063883/37.612.241.397.327.464/gambar-transistor-dengan-konfigurasi-dharlington.webp)
![Tabel 2-5 Konfigurasi bit clock select untuk memilih sumber clock[7]](https://thumb-ap.123doks.com/thumbv2/123dok/1622308.2063883/42.612.170.474.546.677/tabel-konfigurasi-clock-select-untuk-memilih-sumber-clock.webp)
![Gambar 2-22 Konfigurasi Serial DB-9[14]](https://thumb-ap.123doks.com/thumbv2/123dok/1622308.2063883/55.612.254.382.106.215/gambar-konfigurasi-serial-db.webp)
![Gambar 2-29 Aturan-aturan kendali untuk pengendali fuzzy sederhana secara umum[11,13]](https://thumb-ap.123doks.com/thumbv2/123dok/1622308.2063883/71.612.154.486.313.527/gambar-aturan-aturan-kendali-untuk-pengendali-sederhana-secara.webp)
![Tabel 2-15 Aturan-aturan kendali fuzzy secara umum[11]](https://thumb-ap.123doks.com/thumbv2/123dok/1622308.2063883/73.612.229.411.102.184/tabel-aturan-aturan-kendali-fuzzy-secara-umum.webp)