6
BAB II
DASAR TEORI
Pada bab ini akan dijelaskan teori-teori penunjang yang diperlukan dalam merancang dan merealisasikan skripsi ini. Bab ini dimulai dari pengenalan singkat dari komponen elektronik utama yang dipakai. Yaitu yang pertama mikrokontroler, disini dipakai mikrokontroler jenis Arduino Nano sebagai pengendali utama dari sistem, kemudian modul Bluetooth HC-05 sebagai media komunikasi antara mikrokontroler dengan android smartphone, sensor akselerometer digital ADXL 345, LED, dan baterai. Selanjutnya adalah pembahasan tentang perangkat lunak yang dipakai untuk membuat aplikasi user interface pada android smartphone.
2.1. Arduino Nano
Arduino merupakan board sistem minimum mikrokontroler yang mempunyai sifat open source. Board Arduino ini menggunakan IC mikrokontroler AVR yang merupakan produk dari Atmel.
Pada Arduino Nano digunakan IC mikrokontroler ATmega 328 (Arduino Nano 3.x) atau ATmega 168 (Arduino Nano 2.x). Selain bersifat open source Arduino juga memiliki bahasa pemprograman sendiri berupa bahasa C. Arduino Nano memiliki DC power jack, port USB Mini-B yang digunakan untuk upload source code program ke dalam mikrokontroler.[2]
Gambar 2.1. Arduino Nano tampak depan.
7
2.1.1. Spesifikasi
Arduino Nano ini memiliki beberapa spesifikasi, antara lain[2]:
1. Menggunakan mikrokontroler Atmel ATmega 168 atau ATmega 328.
2. Memiliki tegangan operasi sebesar 5 V.
3. Tegangan input yang direkomendasikan sebesar 7 – 12 V. 4. Limit tegangan input 6 – 20 V.
5. Memiliki 14 pin digital I/O (6 diantaranya mendukung output PWM).
6. Memiliki 8 pin input analog. 7. Arus DC per pin I/O 40 mA.
2.1.2. Power
Arduino Nano dapat diberi power melalui koneksi Mini-B USB, pada pin 30 dapat diberi power sebesar 6 – 20 volt, dan pada pin 27 dapat diberi power sebesar 5 volt. Tegangan power tersebut dapat diperoleh melalui koneksi USB, catu daya DC, atau dari baterai.
2.1.3. Input dan Output
Ada 14 pin digital pada Arduino Nano yang dapat digunakan sebagai input ataupun output dengan menggunakan fungsi perintah pinMode(), digitalWrite(), digitalRead(). Input/output ini bekerja pada tegangan 5 V. Setiap pinnya dapat menghasilkan dan menerima arus maksimal sebesar 40 mA.
2.2. Modul Bluetooth HC-05
Pada perancangan skripsi ini dibutuhkan koneksi antara android smartphone dengan mikrokontroler secara nirkabel, maka digunakan media Bluetooth sebagai sarana komunikasi.
Modul Bluetooth yang digunakan adalah tipe HC-05. Modul Bluetooth HC-05 merupakan modul Bluetooth yang dapat diatur sebagai master atau slave. Mode master
8
adalah mode dimana Bluetooth dapat berfungsi sebagai pengirim dan penerima data, sedang mode slave Bluetooth hanya dapat berfungsi sebagai penerima saja.
Modul Bluetooth tipe HC-05 ini memiliki beberapa spesifikasi antara lain adalah[3]:
1. Memakai Bluetooth Chip dengan standar ver 2.0. 2. Menggunakan tegangan rendah sebesar 3,3 volt. 3. Dimensi: 28 mm × 15 mm × 2,35 mm.
4. Jangkauan 10 meter.
Gambar 2.3. Modul Bluetooth HC-05.
2.3. Sensor Akselerometer Digital ADXL 345
Dalam perancangan dan pembuatan skripsi ini akan digunakan sensor akselerometer sebagai pendeteksi percepatan translasi. Yang kemudian percepatan translasi yang terukur akan diolah, jika mengalami perlambatan akan menyalakan LED indikator.
Untuk keperluan tersebut maka akan digunakan sensor akselerometer digital tipe ADXL 345. Sensor ini bisa mengukur percepatan konstan seperti percepatan gravitasi bumi ataupun percepatan gerak translasi, dan mampu mengukur percepatan tersebut pada tiga sumbu yaitu sumbu x, y, dan z. Sensor akselerometer digital ADXL 345 ini memiliki jangkauan pengukuran yang dapat diatur oleh pengguna dengan jangkauan antara 2 g sampai 16 g. Satuan g merupakan satuan dari percepatan gravitasi bumi, dimana 1 g adalah 9.8 m/s2 . Sensor ADXL 345 ini dapat diakses melalui antar muka I2C ataupun SPI [4].
9
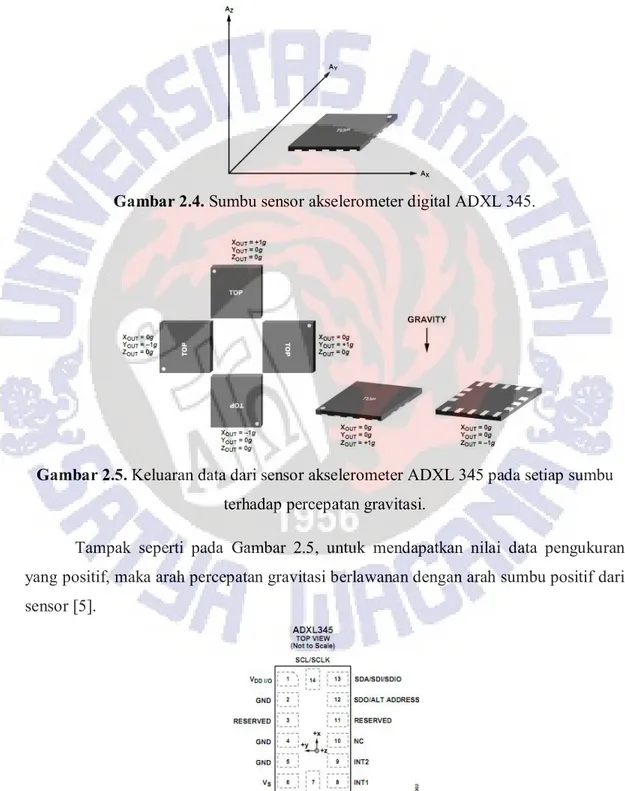
Berikut iniakan dijelaskan mengenai sumbu pengukuran dari sensor ADXL 345 yaitu sumbu x, y, dan z yang akan ditunjukkan pada Gambar 2.4. Kemudian akan dijelaskan mengenai keluaran data dari setiap sumbu sensor tersebut yang ditunjukan pada Gambar 2.5.
Gambar 2.4. Sumbu sensor akselerometer digital ADXL 345.
Gambar 2.5. Keluaran data dari sensor akselerometer ADXL 345 pada setiap sumbu terhadap percepatan gravitasi.
Tampak seperti pada Gambar 2.5, untuk mendapatkan nilai data pengukuran yang positif, maka arah percepatan gravitasi berlawanan dengan arah sumbu positif dari sensor [5].
10
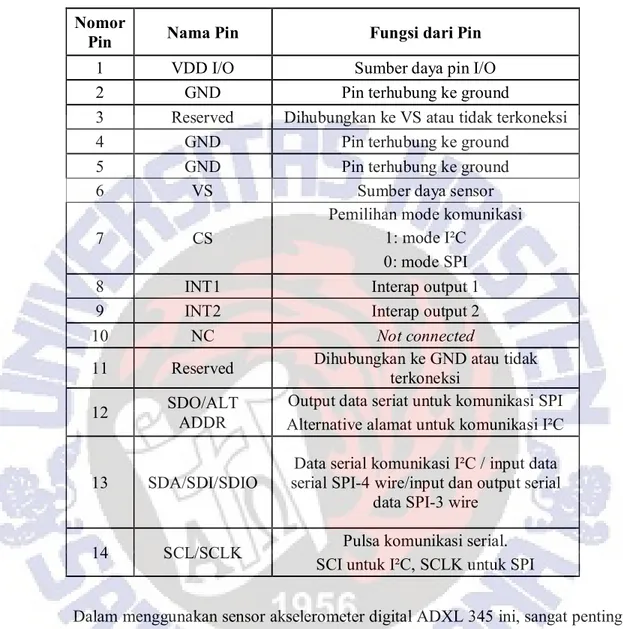
Tabel 2.1. Penjelasan pin akselerometer ADXL 345.
Nomor
Pin Nama Pin Fungsi dari Pin
1 VDD I/O Sumber daya pin I/O
2 GND Pin terhubung ke ground
3 Reserved Dihubungkan ke VS atau tidak terkoneksi
4 GND Pin terhubung ke ground
5 GND Pin terhubung ke ground
6 VS Sumber daya sensor
7 CS
Pemilihan mode komunikasi 1: mode I²C
0: mode SPI
8 INT1 Interap output 1
9 INT2 Interap output 2
10 NC Not connected
11 Reserved Dihubungkan ke GND atau tidak terkoneksi 12 SDO/ALT ADDR Output data seriat untuk komunikasi SPI
Alternative alamat untuk komunikasi I²C 13 SDA/SDI/SDIO serial SPI-4 wire/input dan output serial Data serial komunikasi I²C / input data
data SPI-3 wire 14 SCL/SCLK Pulsa komunikasi serial.
SCI untuk I²C, SCLK untuk SPI
Dalam menggunakan sensor akselerometer digital ADXL 345 ini, sangat penting untuk mengetahui spesifikasi dan karakteristik dari sensor ini. Beberapa parameter penting dari ADXL 345 antara lain resolusi, sensitivitas, serta tegangan operasional sensor. Tabel 2.2 menjelaskan spesifikasi serta parameter-parameter sensor akselerometer digital ADXL 345.
Tabel 2.2. Spesifikasi Akselerometer Digital ADXL 345
Parameter Kondisi Pengujian Min Typ Max Satuan
Jangkaun
pengukuran dipilih user 2 16 g
11
4g, full resolution 11 Bits
8g, full resolution 12 Bits
16g, full resolution 13 Bits
Sensitivitas 2, 10-bits resolution 230 256 282 LSB/g 4g, 10-bits resolution 115 128 141 LSB/g 8g, 10-bits resolution 57 64 71 LSB/g 16g, 10-bits resolution 29 32 35 LSB/g Scale Factor 2, 10-bits resolution 3.5 3.9 4.3 mg/LSB 4g, 10-bits resolution 7.1 7.8 8.7 mg/LSB 8g, 10-bits resolution 14.1 15.6 17.5 mg/LSB 16g, 10-bits resolution 28.6 31.2 34.5 mg/LSB Tegangan pengoperasian (Vs) 2 2.5 3.6 V
Tegangan pin I/O
(Vdd I/O) 1.7 1.8 Vs V
I2C Address ALT ADDRESS = VDD 0x1D heksa
ALT ADDRESS = GND 0x53 heksa
Terlihat dari Tabel 2.2, akselerometer ADXL 345 memiliki jangkauan pengukuran antara 2 g sampai 16 g dengan resolusi 10 – 13 bit. Pemilihan resolusi ini perlu memperhatikan sensitivitas dan scale factor. Misalkan dipilih jangkauan pengukuran 2 g, maka sensor akan memberikan nilai antara 230 – 282 pada setiap sumbunya. Begitu pula dalam pemilihan resolusi yang lain. Jadi jika diinginkan untuk mengukur percepatan yang tinggi harus dipilih skala yang tinggi, dan sebaliknya.
Idealnya sensor akan memberikan nilai typical sensitivitas untuk setiap skala. Namun tidak bisa dijamin sensor ADXL 345 akan memberikan nilai yang ideal di setiap sumbunya, dan tidak bisa dijamin pula pada ketiga sumbunya akan memberikan nilai sensitivitas yang sama. Sehingga jika diperlukan sensor bisa dikalibrasi lebih lanjut.
12
2.4. Light-Emitting Diode (LED).
LED merupakan suatu komponen elektronika yang dapat memancarkan cahaya monokromatik saat diberikan tegangan. Seperti namanya light-emiting diode, LED adalah komponen berupa diode yang terbuat dari bahan semikonduktor. Warna yang dipancarkan tergantung dari bahan semikonduktor yang dipakai untuk membuatnya. Dan karena tidak seperti lampu pijar yang memerlukan pembakaran filament, maka LED tidak menimbulkan panas dalam menghasilkan cahaya.[6]
Pada skripsi ini LED digunakan sebagai lampu indikator yang terpasang pada helm, yang berfungsi antara lain sebagai indikator perlambatan, sein kiri, sein kanan, dan lampu depan.
Gambar 2.7. LED.
2.5. Baterai.
Karena pada perancangan dan pembuatan skripsi kali ini akan dibuat sebuah alat yang portable maka akan digunakan baterai untuk menyuplai tegangan pada mikrokontroler, sensor dan aktuator. Baterai yang dipakai adalah baterai sekunder (baterai yang dapat diisi ulang) yang memiliki tegangan sebesar 5 volt, yaitu besar tegangan yang dibutuhkan oleh mikrokontroler, sensor, dan modul Bluetooth untuk bekerja.
2.6. Eclipse IDE
Eclipse merupakan sebuah IDE (Integrated Development Environment) yang digunakan dalam pengembangan perangkat lunak dan dapat dijalankan pada semua platform/OS. Berikut akan dijelaskan beberapa sifat dari Eclipse:[3]
13
1. Multi-platform. Target sistem operasi Eclipse antara lain mencakup Microsoft Windows, Linux, Solaris, AIX, HP-UX, dan Mac OS X.
2. Multi-language. Eclipse dikembangkan dengan bahasa pemprograman Java, tetapi eclipse mendukung pengembangan aplikasi berbasis bahasa pemprograman lain seperti C++, Cobol Pyton, Perl, PHP, dan lain sebagainya.
3. Multi-role. Selain sebagai IDE untuk pengembangan apliksi. Eclipse juda digunakan dalam pengembangan perangkat lunak seperti dokumentasi, tes perangkat lunak, dan pengembangan web.