TUGAS AKHIR
SELECTIVE COMPLIENT ARTICULATED ROBOT
ARM (SCARA) BERBASIS ARDUINO DAN VISUAL
BASIC 6.0 DALAM SISTEM PICK AND PLACE
BENDA KERJA
Oleh
YOHANES BERCHMAN ADYAPAKA APATYA NIM : 10 5114 026
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA YOGYAKARTA
2013
i
TUGAS AKHIR
SELECTIVE COMPLIENT ARTICULATED ROBOT
ARM (SCARA) BERBASIS ARDUINO DAN VISUAL
BASIC 6.0 DALAM SISTEM PICK AND PLACE
BENDA KERJA
Oleh
YOHANES BERCHMAN ADYAPAKA APATYA NIM : 10 5114 026
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
ii
FINAL PROJECT
SELECTIVE COMPLIENT ARTICULATED ROBOT
ARM (SCARA) BASE ON ARDUINO AND VISUAL
BASIC 6.0 IN SYSTEM PICK AND PLACE OBJECT
WORK
Author
YOHANES BERCHMAN ADYAPAKA APATYA NIM : 10 5114 026
ELECTRICAL ENGINEERING PROGRAM STUDY
SAINS AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY YOGYAKARTA
2013
HALAMAN
PBRSETUJUAII
TUGAS
AKHIR
SELECTIVE COMPLIANT ARTICULATED ROBOT
ARM
(scARA)
BERBASTS
ARDUTNO
DAN
VTSUAL
BASrC
6.0
DALAM
SISTEM PICK AI\D
PLACE BENDA
KERJA
Oleh
:Yohanes
Berchman Ad]rapaka
Apat-vaNIM : 105114026
telah disetujui oleh :
l1l
Pembimbing
HALAMAN
PENGESAHAN
TUGAS
AKHIR
SELECTIVE
COMPLIANT ARTICULATED ROBOT ARM
(SCARA)
BEREBASIS
ARDUINO DAN VISUAL BASIC
6.0DALAM
SISTEM
PICK AND PLACE BBNDA KERJA
Oleh:
Yohanes Berchman Adlzapaka Apatya
NIM: 105114026
Telah dipertahankan di depan Panitia Penguji
Pada tanggal 12 Februari2073
Dan dinyatakan memenuhi syarat
Ketua Anggota Anggota
Susunan Panitia Penguji
Nama Lengkap
Ir. Tjendro, M.Kom.
Martanto, S.T., M.T.
Ir. Th. Prima Ari Setiyani, M.T.
Yogyakarta, 2 I Februari 2013 Fakultas Sains dan Teknologi Universitas Sanata Dharma
tv
Heruningsih Prima Rosa, S.Si., M.Sc.
PERI\-YATAAi\ KEASLIAN KARYA
Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis ini tidak
memuat karya atau bagian karya orang 1ai4 kecuali yang telah disebutkan dalam kutipan dan daftar pustak4 sebagaimana layaknya karya ilmiah.
Yogyakarta"I I Februari 20 13
vi
Halaman Persembahan dan Motto :
HALAMAN
PERNYATAAN
PBRSETUJUAN
PUBLIKASI KARYA
ILMIAH
UNTUK
KEPENTINGAN AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma :
Nama
: Yohanes Berchman Adyapaka ApatyaNomor Mahasiswa : 105114026
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan Universitas
Sanata Dharma karya ilmiah saya yang berjudul :
SELECTIVE COMPLIANT ARTICULATED ROBOT ARM (SCARA) BERBASIS
ARDUINO DAN VISUAL BASIC 6.0
DA
AM SISTEM PICK AND PLACE BENDAKERJA
beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan kepada Perpustakaan Universitas Sanata Dharma hak untuk menyimpan, mengalihkan dalam bentuk media lain, mengelolanya dalam bentuk pangkalan data, mendistribusikan secara terbatas, dan
mempublikasikannya
di
internet atau media lain untuk kepentingan akademis tanpa perlumeminta ijin dari saya maupun memberikan royalty kepada saya selama tetap mencantumkan nama saya sebagai penulis.
Demikian pernyataan ini yang saya buat dengan sebenarnya.
Yogyakarta,ll Februari 20 13
Y.B.Adyapaka Apatya
viii
INTISARI
Manusia adalah makhluk paling berharga di dunia ini. Manusia menjadi sangat berharga jika dikaitkan dengan pekerjaan manusia yang memperhitungkan segi kesehatan, keamanan, dan tekanan kerja. Tak seharusnya manusia bekerja dalam lingkungan yang kotor. Perkembangangan teknologi saat ini mulai diarahkan ke arah memanusiakan manusia. Selective Compliant Articulated Robot Arm(SCARA) berbasis Arduino dan Visual Basic 6.0 dalam sistem Pick and Place benda kerja diharapkan mampu menjawab arah dasar teknologi untuk memanusiakan manusia.
Pada penelitian ini, Selective Compliant Articulated Robot Arm(SCARA) berbasis Arduino dan Visual Basic 6.0 dalam sistem Pick and Place benda kerja menggunakan Arduino sebagai pengontrol kerja dan menggunakan Visual Basic 6.0 sebagai user interfacenya. Aktuator untuk menggerakkan SCARA berupa motor stepper dan silinder pneumatik. End effector yang dipakai dalam sistem ini berupa sucker untuk mengambil benda kerja. Limit Switch dipakai untuk mendeteksi referensi gerakan awal SCARA. SCARA akan bekerja jika ada masukan posisi dan perintah-perintah lainnya yang dimasukkan oleh user melalui GUI. Selanjutnya masukan yang berasal dari user akan dikirimkan ke Arduino oleh GUI. Arduino akan mengeksekusi masukan menjadi keluaran yang berupa gerakan SCARA untuk mengambil dan menaruh benda kerja sesuai dengan masukan yang diterima Arduino.
Selective Compliant Articulated Robot Arm(SCARA) berbasis Arduino dan Visual Basic 6.0 dalam sistem Pick and Place benda kerja telah dibuat. Akan tetapi, unjuk kerja SCARA masih belum dapat bekerja karena hardware lengan tidak mampu digerakkan oleh aktuator. Walaupun demikian, secara sub sistem sudah dapat bekerja dengan baik.
Kata kunci : SCARA, Arduino, Visual Basic 6.0, Graphical User Interface, Motor Stepper, Limit switch, Sistem Pneumatik, Pick and Place.
ix
ABSTRACT
Human being is most valuable creature in this world. Human being become very valuable if related to work of human being reckoning health facet, security, and job pressure. Do not human being ought to work in dirty environment. Technology in this time start to be pointed at direction humanize human being. Selective Compliant Articulated Rrobot Arm (SCARA) Base on Arduino and Visual Basic 6.0 in System Pick and Place Object Work can answer elementary direction of technology to humanize human being.
At this research, Selective Compliant Articulated Robot of Arm(SCARA) being based on Arduino and is Visual Basic 6.0 in system of Pick Place work object and use Arduino as controller work and use Visually Basic 6.0 as user interface. Actuatorr to move SCARA in the form of motor of stepper cylinder and of pneumatik. Effector End weared in this system in the form of sucker to take work object. Limit Switch weared to detect movement reference early SCARA. SCARA will work if there is position input and other comands which included by user through GUI. Hereinafter input coming from user will be delivered to Arduino by GUI. Arduino will execute input become output which in the form of movement of SCARA to take and put object work as according to accepted by input Arduino.
Selective Compliant Articulated Robot of Arm(Scara) being based on Arduino and is Visual Basic 6.0 in system of Pick Place Object Work have been made. However, work of SCARA still not yet earned to work because arm hardware unable to be moved by aktuator. Even though, subly system have earned to work better.
KATA
PENGANTAR
Puji
syukur penulis panjatkan kepada Tuhan Yesus Kristus atas karunia dananugerah-Nya serta dampingan-Nyu, sehingga tugas akhir yang berjudul "Selective
Compliant Articulated Robot Arm (SCARA) berbasis Arduino dan Visual Basic 6.0 untuk
Pick and Place Benda
Kerja"
dapat diselesaikan. Penulis mengucapkan terimakasihkepada segenap pihak yang telah memberikan doa, dorongan, bantuan, dan bimbingan
dalam menyelesaikan tugas akhir ini.
1.
Dekan Fakultas Sains dan Teknologi Universitas Sanata Dharma Yogyakarta.2.
Ketua Program Studi Teknik Elektro Universitas Sanata Dharma Yogyakarta.3. Bapak Martanto, S.T.,
M.T., selaku dosen pembimbing dan dosen pendampingakademik yang senantiasa memberikan bimbingan,
kritik,
saran serta dorongan,
bagi penulis.4.
Ibu Ir. Th. Prima Ari Setiyani, M.T. dan Bapak Ir. ljendro, M.Kom. selaku dosenpenguji tugas akhir yang banyak membuka pemikiran saya.
5.
Bapak Ibu dosen serta laboran Teknik Elektro yang telah mendampingi penulis selama menimba ilmu.6.
Segenap Staf Sekretariat Fakultas Sains dan Teknologi7.
Kedua orang tua penulis, khususnya Bapak Edy Suyanta Macarius yang dengansabar memberikan inspirasi hidup untuk penulis.
8. Adikku
yang selalu hadir mewamai kehidupan penulis.9.
Kekasihku atas dukungan, doa, cinta, perhatian, dan kasih sayang.10. Teman-teman Teknik Elektro angkatan 2007-2011 yang menemani penulis selama belajar di Teknik Elektro.
ll.Nugroho Budi Wicaksono S.T, teman sekaligus guru yang telah membantu dan
membimbing penulis dalam menyelesaiakan tugas akhir. 12. Semua pihak yang tidak dapat disebutkan satu persatu,
Penulis menyadari bahwa dalam penyusunan laporan akhir
ini
masih banyakkekurangannya. Oleh karena itu, penulis mengharapkan masukan, kritik dan saran yang membangun agar skripsi ini menjadi lebih baik sehingga dapat bermanfaat bagi kita.
Penulis
xi
DAFTAR ISI
HALAMAN JUDUL ... i
TITLE PAGE ... ii
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN DAN MOTTO ... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xi
DAFTAR GAMBAR ... xiv
DAFTAR TABEL ... xvii
DAFTAR LAMPIRAN ... xviii
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 2
1.2 Tujuan dan Manfaat ... 2
1.3 Batasan Masalah ... 2
1.4 Metodologi Penelitian ... 2
BAB II DASAR TEORI ... 5
2.1 Manipulator Robot ... 5
2.2 Mikrokontroler ATmega 328 ... 8
2.3 Arduino Uno ... 9
2.4 Visual Basic ... 12
2.5 Kinematika Lengan Robot ... 14
2.6 Motor Stepper ... 16
2.7 Driver Motor Stepper ... 19
xii
2.9 Optocoupler ... 19
2.10 Limit Switch ... 20
2.11 Pengendalian Untai Terbuka ... 20
2.12 Sistem Pneumatik ... 21
BAB III RANCANGAN PENELITIAN ... 26
3.1 Diagram Block Sistem ... 26
3.2 Perancangan Hardware ... 27
3.2.1 Hardware Mekanik ... 27
3.2.2 Hardware Elektrik ... 29
3.2.2.1 Minimum Sistem ATmega 328 ... 30
3.2.2.2 Driver Motor Stepper ... 30
3.2.2.3 Limit Switch ... 32
3.2.2.4 Elektropneumatik ... 32
3.3 Perancangan Perangkat Lunak ... 35
3.3.1 Perancangan Tampilan Program Visual Basic ... 35
3.3.2 Diagram Alir Program Visual Basic ... 37
3.3.3 Diagram Alir Arduino ... 39
3.3.3 Subrutin Limit Switch ... 39
BAB IV HASIL DAN PEMBAHASAN ... 43
4.1 Hardware Mekanik ... 43
4.1.1 Bentuk Meja ... 43
4.1.2 Bentuk Hardware SCARA ... 44
4.1.3 Bentuk Grid Koordinat Posisi ... 44
4.1.4 Assembly Hardware ... 45
4.2 Hardware Elektrik ... 45
4.2.1 Hardware Aktuator ... 45
4.2.1.1Pengamatan dan Pembahasan Motor Stepper ... 46
4.2.1.2Pengamatan dan Pembahasan Pneumatik ... 47
4.2.2 Hardware Rangkaian Elektrik ... 48
4.2.2.1Rangkaian Driver Motor Stepper ... 48
4.2.2.2Rangkaian Driver Solenoide ... 49
4.2.2.3Regulator Tegangan ... 50
xiii
4.3 Software ... 53
4.3.1 Program User Interface Menggunakan Visual Basic 6.0 (GUI SCARA) ... 53
4.3.1.1 Program Simulasi ... 55
4.3.1.2 Program Kalkulasi ... 59
4.3.1.3 Program Komunikasi ... 62
4.3.2 Program Arduino sebagai Kontroler SCARA ... 66
4.4 Pengujian Tingkat Keberhasilan ... 68
4.4.1 Pengujian sub sistem Arduino ... 68
4.4.2 Pengujian sistem SCARA berbasis GUI dan Arduino ... 70
BAB V KESIMPULAN DAN SARAN ... 71
DAFTAR PUSTAKA ... 72
xiv
DAFTAR GAMBAR
Gambar 1.1 Bagan sistem SCARA ... 3
Gambar 2.1 Konfigurasi Cartesian ... 6
Gambar 2.2 Konfigurasi Cylindrical ... 6
Gambar 2.3 Konfigurasi Polar ... 7
Gambar 2.4 Konfigurasi Articulated ... 7
Gambar 2.5 Konfigurasi SCARA ... 8
Gambar 2.6 Modul Arduino Uno ... 10
Gambar 2.7 Konfigurasi pin ATmega328 pada Arduino Uno ... 10
Gambar 2.8 Tampilan Pemrograman Arduino ... 11
Gambar 2.9 Jendela Visual Basic 6.0 ... 13
Gambar 2.10 Konfigurasi Robot Tangan Planar 2 Sendi ... 14
Gambar 2.11 Cara Kerja Motor Stepper ... 17
Gambar 2.12 Mode Fullstep ... 18
Gambar 2.13 Mode Halfstep ... 18
Gambar 2.14 Gambar Limit Switch ... 20
Gambar 2.15 Model pengendalian untai terbuka ... 21
Gambar 2.16 Diagram Alir Sistem Pneumatik ... 21
Gambar 2.17 Gambar Silinder Aksi Tunggal ... 22
Gambar 2.18 Gambar Silinder Aksi Ganda ... 22
Gambar 2.19 Cara Menggambar dan Membaca Katub Pneumatik ... 23
Gambar 2.20 Ringkasan Katup Penyearah dari Macam-macam Katup Pneumatik ... 24
Gambar 2.21 Jenis Kontrol Katup Secara Manual ... 24
Gambar 2.22 Jenis Kontrol Katup Secara Mekanik ... 25
Gambar 2.23 Jenis Kontrol Katup Secara Pneumatik ... 25
Gambar 2.24 Jenis Kontrol Katup Secara Elektrik ... 25
Gambar 3.1 Diagram Block Sistem ... 26
Gambar 3.2 Rancang Bangun Lengan Robot ... 27
Gambar 3.3 Gambar 3.3 Gambar meja untuk SCARA ... 28
Gambar 3.4 Rancangan Milimeter Block untuk Penentuan Posisi ... 28
xv
Gambar 3.6 Minimum system ATmega328 ... 30
Gambar 3.7 Rangkaian driver motor stepper ... 31
Gambar 3.8 Driver untuk solenoide silinder ... 33
Gambar 3.9 Driver solenoide untuk vacum generator ... 33
Gambar 3.10 Diagram sistem pneumatik ... 34
Gambar 3.11 Tampilan Visual Basic 6.0 ... 35
Gambar 3.12 Diagram alir GUI (Graphical User Interface) ... 37
Gambar 3.13 Diagram alir simulasi ... 39
Gambar 3.14 Diagram alir Arduino posisi 1 ... 40
Gambar 3.14 Diagram alir Arduino posisi 2(lanjutan) ... 40
Gambar 3.15 Gambar diagram alir limit switch ... 41
Gambar 4.1 Gambar meja tempat plant SCARA diletakkan. ... 43
Gambar 4.2 Gambar hardware SCARA ... 44
Gambar 4.3 Gambar grid koordinat posisi ... 44
Gambar 4.4 Hardware mekanik SCARA ... 45
Gambar 4.5 Gambar motor stepper 1 dan motor stepper 2 ... 46
Gambar 4.6 Gambar solenoide elektrik dan vacuum generator ... 47
Gambar 4.7 Gambar indikator solenoide menyala ... 48
Gambar 4.8 Driver motor stepper tampak depan ... 49
Gambar 4.9 Driver motor stepper tampak atas ... 49
Gambar 4.10 Driver solenoide ... 50
Gambar 4.11 Gambar schematik regulator tegangan ... 51
Gambar 4.12 Gambar rangkaian regulator tegangan ... 51
Gambar 4.13 Gambar schematik rangkaian limit switch ... 52
Gambar 4.14 Gambar rangkaian limit switch SCARA ... 53
Gambar 4.15 Tampilan awal GUI SCARA ... 54
Gambar 4.16 Tampilan utama GUI SCARA ... 54
Gambar 4.17 Gambar tampilan simulasi ... 55
Gambar 4.18 Gambar koding area kerja SCARA pada GUI ... 56
Gambar 4.19 Gambar hasil area kerja GUI SCARA ... 56
xvi
posisi kedua pada simulasi ... 58
Gambar 4.22 Gambar tampilan masukan koordinat oleh user ... 59
Gambar 4.23 Koding Visual Basic 6.0 deklarasi variabel perhitungan jumlah pulsa untuk posisi satu dan posisi dua ... 60
Gambar 4.24 Koding perhitungan jumlah pulsa untuk posisi satu dan posisi dua ... 60
Gambar 4.25 Koding perhitungan jumlah pulsa untuk posisi satu dan posisi dua ... 61
Gambar 4.26 Gambar tampilan hasil kalkulasi ... 61
Gambar 4.27 Gambar tombol GUI SCARA mode tidak sedang komunikasi dengan Arduino ... 62
Gambar 4.28 Gambar tombol komunikasi mode komunikasi antar GUI SCARA dengan Arduino ... 62
Gambar 4.29 Gambar koding Visual Basic 6.0 untuk membuka komunikasi dengan Arduino ... 63
Gambar 4.30 Koding Visual Basic 6.0 tombol disconect ... 63
Gambar 4.31 Koding Visual Basic 6.0 untuk memberikan perintah nesting ke Arduino .. 63
Gambar 4.32 Koding Visual Basic 6.0 untuk perintah nesting ... 64
Gambar 4.33 Koding deklarasi variabel komunikasi data ... 64
Gambar 4.34 Koding komunikasi data dari Visual Basic 6.0 ke Arduino ... 64
Gambar 4.35 Penulisan pulsa di GUI SCARA ... 65
Gambar 4.36 Koding menampilkan pulsa berupa 3 digit angka di GUI ... 65
Gambar 4.37 Koding pengiriman data dari Visual Basic 6.0 ke Arduino ... 66
Gambar 4.38 Gambar grafik pengujian Arduino untuk motor stepper 1 ... 68
xvii
DAFTAR TABEL
Tabel 2.1 Konfigurasi dan deskripsi pin ATmega328 ... 9
Tabel 3.1 Alokasi pin ATmega328 dengan L293 ... 31
Tabel 3.2 Alokasi pin ATmega328 dengan limit switch ... 32
Tabel 3.3 Alokasi pin Arduino untuk aktuator pneumatik (solenoide) ... 32
Tabel 3.4 Objek pada tampilan GUI ... 36
Tabel 4.1 Hasil pengamatan motor stepper 1 dan motor stepper 2 ... 46
Tabel 4.2 Tabel pengujian driver motor stepper ... 49
Tabel 4.3 Tabel pengujian rangkaian driver solenoide ... 50
Tabel 4.4 Tabel pengujian rangkaian regulator tegangan ... 51
Tabel 4.5 Tabel pengujian limit switch ... 52
xviii
DAFTAR LAMPIRAN
Halaman L1. Hasil Pengujian Sub Sistem Arduino ... L1 L3. Listing Program Arduino ... L3 L4. Listing Program Visual Basic 6.0 ... L15 L6. Hasil Perancangan Hardware Mekanik ... L27 L11. Rangkaian Elektrik Output ... L35 L12. Name Plate Motor Stepper ... L36 L13. Name Plate Solenoide ... L37
BAB I
PENDAHULUAN
1.1 Latar Belakang
Palletizing adalah suatu operasi mengambil dan meletakkan barang/produk dari suatu
pallet/tempat lain ke pallet yang lain dengan urutan dan berjajar teratur[1]. Palletizing juga sering disebut dengan istilah pick and place. Dalam dunia industri, proses ini dikategorikan sebagai proses non produktif, namun mempunyai peranan yang sangat penting serta berpengaruh terhadap hasil produksi yang dapat dicapai. Bisa dibayangkan jika dalam suatu proses produksi terjadi keterlambatan serta ketidaktepatan bahan, hal tersebut tentu akan mengurangi jumlah pencapaian hasil produksi.
Pada kebanyakan pabrik, palletizing masih dikerjakan oleh manusia. Manusia sebenarnya tidak cocok dalam pekerjaan ini karena kondisi fisik dari manusia yang terbatas. Manusia tidak dapat bekerja secara stabil terlebih menyangkut pekerjaan yang menuntut kecepatan dan ketepatan.
Masalah lain yang muncul ketika memekerjakan manusia adalah resiko kecelakaan kerja yang ada dalam setiap proses produksi. Hal tersebut menambah alasan tidak memekerjakan manusia untuk berinteraksi secara langsung dalam proses produksi, terlebih dalam palletizing. Robot arm atau lengan robot diharapkan dapat menjadi salah satu solusi untuk membantu peranan manusia agar manusia tidak berhubungan langsung dengan hal-hal yang tidak seharusnya dilakukan manusia.
Ada beberapa konfigurasi dari lengan robot yang dikenal. Konfigurasi adalah cara untuk mengklasifikasikan di dalam robot-robot industri. Konfigurasi merujuk pada bentuk geometri dari manipulator robot, yaitu bagaimana cara hubungan dari manipulator pada setiap joint. Robotic Industries Association (RIA) mendefenisikan robot sebagai manipulator yang didesain untuk memindahkan material, benda, alat atau peralatan tertentu lewat pergerakan yang terprogram untuk melakukan berbagai macam tugas. Salah satunya yang dipakai yaitu konfigurasi Selective Complient Articulated Robot Arm (SCARA). Konfigurasi ini adalah gabungan antara konfigurasi lengan artikulasi dan konfigurasi lengan silindris[2]. Konfigurasi SCARA merupakan konfigurasi yang terbaru, yang dikembangkan oleh Professor Hiroshi Makino dari Universitas Yamanashi, Jepang. Seperti namanya, konfigurasi ini telah dirancang untuk memberikan pergerakan pada arah
2
horizontal[2]. Pemilihan menggunakan konfigurasi SCARA, dikarenakan konfigurasi robot ini memiliki derajat yang tinggi akan pengulangan posisi[3].
Pada penelitian ini, penulis akan membuat robot arm dengan konfigurasi SCARA yang mempunyai 3 Degree of Freedom (DOF) , yang terdiri dari 2 lengan yang bergerak secara rotasi (revoluted) dan 1 lengan yang bergerak secara linier (prysmatic). Gerakan robot dikendalikan melalui komputer dengan menggunakan perangkat lunak Visual Basic. Data dari komputer kemudian akan dikirim ke mikrokontroler ATmega 328 yang bertindak sebagai kontroler robot arm. Mikrokontroler ini terletak pada sebuah board yang dikenal dengan Arduino. Mikrokontroler akan mengolah data yang diterima dan menggubahnya menjadi bentuk gerakan lengan robot berdasarkan data yang diberikan. Lengan robot akan bergerak secara terus menerus sesuai dengan posisi yang diberikan kepadanya. Sucker dipakai sebagai end effector, yaitu device untuk mengambil/membawa benda kerja.
1.2 Tujuan dan Manfaat
Tujuan penelitian ini adalah untuk membuat robot arm dengan konfigurasi SCARA berbasis Arduino dan Visual Basic 6.0 yang diaplikasikan dalam sistem pick and place untuk mengambil benda kerja.
Manfaat dari penelitian ini adalah sebagai salah satu solusi menjawab kebutuhan industri, yaitu dalam hal palletizing atau pick and place. Selain itu, robot arm ini dapat dipakai sebagai modul pembelajaran, khususnya untuk bidang pengajaran robotika, mikrokontroler, dan aktuator.
1.3 Batasan Masalah
a. Lengan robot dengan 3 Degree of Freedom (DoF), yakni 2 Revoluted (2R) dan 1
Prysmatic (1P) serta end effector berupa sucker.
b. Area kerja untuk gerakan rotasi sebesar 180° dan untuk gerakan liniernya sebesar 25 cm secara vertikal.
c. Kontroler yang dipakai adalah Arduino Uno.
d. Aplikasi lengan robot sebatas memindahkan barang dari satu posisi ke posisi lainnya. e. Benda kerja berupa tabung pipih (dalam prototype ini benda kerja menggunakan koin
karambol).
f. Aspek dinamika benda rigid tidak diperhitungkan dalam penelitian ini.
1.4 Metodologi Penelitian
Metodologi penelitian yang dipakai dalam penelitian ini adalah :
a. Pengumpulan referensi-referensi dari berbagai buku, jurnal serta sumber-sumber yang relevan dari internet.
b. Perancangan sub sistem baik meliputi sub sistem hardware (elektrik dan mekanik) maupun sub sistem software (user interface). Perancangan ini bertujuan untuk mencari bentuk sistem, sehinga nantinya didapatkan bentuk sistem yang mampu bekerja secara optimal. Tentunya dengan catatan bahwa komponen penyusun sistem mudah didapat di pasaran.
Gambar 1.1 Bagan sistem SCARA
c. Pembuatan subsistem hadware dan software meliputi sistem mekanik, sistem elektrik serta programming. Pada Gambar 1.1 dapat dilihat sub-sistem yang akan dibangun untuk membentuk sistem kerja SCARA. Bagian pertama adalah antar muka pengguna yang berbasis PC(Personal Computer) menggunakan software Visual Basic 6.0. Masukan berupa posisi awal benda kerja dan posisi yang akan dituju oleh benda kerja dari pengguna akan dikirimkan oleh komputer untuk diproses oleh kontroler. Kontroler yang dipakai menggunakan ATmega 328 yang terdapat dalam board Arduino Uno. Masukan tersebut akan diolah oleh kontroler dan dikeluarkan dalam bentuk gerakan aktuator. Terdapat empat buah aktuator dalam lengan robot ini, yang terdiri dari dua buah motor stepper dan dua buah solenoide. Lengan 1 dan 2 yang bergerak secara
revoluted menggunakan motor stepper. Lengan 3 yang bergerak secara prismatic
menggunakan aktuator berupa pneumatic system yang berupa solenoide dan silinder.
4
aktuator solenoide, vacum generator, dan PE Converter (Pneumatic to Elektrik
Converter).
d. Assembling ketiga sub sistem menjadi suatu sistem besar yaitu SCARA.
e. Pengujian dan pengambilan data. Pengujian dan pengambilan data penelitian dilakukan dengan membandingkan data (posisi) yang terdapat pada Visual Basic 6.0 dengan kesesuaian data yang terdapat pada plant.
f. Analisa data dan penyimpulan hasil penelitian. Analisa data didasarkan pada kesesuaian data yang dimasukkan ke dalam komputer (input) dengan data dari plant (output). Penyimpulan akhir dilakukan dengan melihat besarnya error antara data dari komputer dan juga data dari plant. Indikator keberhasilan terletak pada keakuratan data yang diberikan dari komputer dan data realtime pada plant.
5
BAB II
DASAR TEORI
Bab ini menjelaskan mengenai teori-teori mengenai komponen-komponen pendukung, perhitungan serta teknik yang dipakai pada penelitian ini. Komponen-komponen yang dipakai pada penelitian ini antara lain Motor Stepper Unipolar, Arduino Uno, Mikrokontroler ATmega 328, software Visual Basic 6.0 dan rangkaian elektronika yang dibutuhkan untuk penelitian ini. Rangkaian elektronika terdiri rangkaian driver motor stepper dan rangkaian driver untuk solenoide. Perhitungan posisi lengan robot menggunakan perhitungan kinematika, yaitu kinematika mundur (Invers Kinematics). Pengendalian sistem yang dipakai sistem untai terbuka (open loop) karena aktuatornya menggunakan motor stepper.
2.1 Manipulator Robot
Manipulator adalah suatu peralatan yang menyerupai lengan manusia dan dapat memindahkan benda dari suatu tempat ke tempat lainnya dalam ruang tiga dimensi[4]. Suatu benda dapat disebut manipulator jika mempunyai link dan joint. Link adalah benda
rigid yang menyerupai tulang lengan manusia. Joint adalah sambungan yang dibentuk oleh
dua dua buah link yang saling bersinggungan.
Dengan adanya link dan joint akan menghasilkan gerakan atau suatu mobilitas dari manipulator, baik gerakan prismatik maupun gerakan rotasi. Gerakan prismatik adalah gerakan lurus, dapat berupa gerakan lurus secara vertikal maupun gerakan lurus secara horizontal. Rotasi adalah gerakan berputar. Mobilitas atau gerakan tersebut dikenal dengan istilah derajat kebebasan (degree of freedom). Setiap manipulator yang mempunyai satu
link dan satu joint mempunyai mempunyai satu DoF (degree of freedom)[5].
6
a. Konfigurasi cartesian
Gambar 2.1. Konfigurasi cartesian[6]
Gambar 2.1 menggambarkan bentuk dari manipulator konfigurasi cartesian. Konfigurasi ini terdiri dari satu atau lebih joint prismatik dan akan menghasilkan gerakan linear yang dapat bergerak dalam bidang horizontal dan bidang vertikal. Area kerja (woekspace) yang dapat dibentuk oleh manipulator konfigurasi cartesian menyerupai bentuk balok. Work volume adalah lebar bidang dari area kerja dan work envelope adalah kedalaman/permukaan dari area kerja [6].
b. Konfigurasi cylindrical
Gambar 2.2. Konfigurasi cylindrical[6]
Gambar 2.2 di atas adalah gambar dari konfigurasi manipulator cylindrical. Konfigurasi ini biasanya terbentuk dari gabungan antara joint prismatik dan revolute. Perbedaan konfigurasi cylindrical dengan konfigurasi cartesian pada gerakan yang
dihasilkan dapat berupa gerakan rotasi. Area kerja yang dibentuk oleh konfigurasi ini menyerupai bentuk tabung.
c. Konfigurasi polar
Gambar 2.3. Konfigurasi polar[6]
Gambar 2.3 adalah gambar yang menunjukan konfigurasi manipulator polar (spherical). Gambar 2.3 menunjukkan pada konfigurasi ini merupakan gabungan dari tiga macam joint, yaitu joint untuk gerakan rotasi secara vertikal, gerakan rotasi secara horisontal, dan joint untuk gerakan prismatik. Area kerja yang dihasilkan oleh konfigurasi ini menyerupai setengah bola.
d. Konfigurasi articulated
Gambar 2.4 Konfigurasi articulated[6]
Gambar 2.4 menggambarkan konfigurasi ariculated. Konfigurasi ini adalah konfigurasi yang konfigurasi yang paling mirip dengan lengan manusia[6]. Konfigurasi
articulated pada Gambar 2.4 terdiri dari gabungan tiga gerakan rotasi. Area kerja yang
8
ruang menyerupai setengah bola. Perbedaan dari kedua konfigurasi tersebut terletak padavariasi gerakan uang lebih banyak untuk konfigurasi articulated. Hal ini dikarenakan konfigurasi articulated terdiri dari gerakan rotasi untuk semua link.
e. Konfigurasi SCARA
Gambar 2.5 Konfigurasi SCARA[6]
Gambar 2.5 adalah gambar konfigurasi SCARA. Konfigurasi ini adalah konfigurasi yang paling baru. konfigurasi SCARA merupakan gabungan dari gerakan linear dan gerakan rotasi. Gerakan linear memberikan keleluasaan untuk bidang vertikal. Gerakan rotasi memberikan keleluasaan untuk bidang horizontal. Perpaduan dari dua gerakan tersebut menghasilakan area kerja menyerupai tabung.
2.2 Mikrokontroler ATmega 328
Mikrokontroler adalah suatu chip atau IC (Integrated Circuit) yang dapat ditanamkan program menggunakan komputer sehingga dapat digunakan untuk menerima masukan kemudian memprosesnya sehingga menghasilkan keluaran yang sesuai dengan yang keluaran yang diinginkan. Dalam penelitian ini digunakan mikrokontroler ATmega328 karena kompatibilitasnya dengan Arduino dan fiturnya cukup lengkap. ATmega328 memiliki fitur 32 kByte downloadable flash memory, 1 kByte Electrically
Erasable Programmable Read-Only Memory (EEPROM), 2 kByte internal Static
Random-Access Memory (SRAM), 2 Timer/Counter 8 bit dan 1 Timer/Counter 16 bit, 6 kanal
PWM, Serial USART yang dapat diprogram, dan frekuensi kerja sampai dengan 20 MHz[7].
ATmega 328 memiliki bebrapa mode komunikasi. Salah satu di antaranya adalah
USART. Universal Synchronous dan Asynchronous serial Receiver and Transmitter
(USART) adalah salah satu mode pengiriman dan penerimaan data secara serial. USART
dapat dipakai untuk transfer data antarmikrokontroler dan komputer yang memiliki fitur UART (Universal Asynchronus serial Receiver anf Transmitte). Untuk komunikasi dua arah (bi-directional), USART memiliki tiga sambungan, yaitu Rx (Receiver), Tx (Tramsmitter), dan GND (Ground).
Tabel 2.1 Konfigurasi dan deskripsi pin ATmega328[8]
No Pin Nama Pin Keterangan
7 VCC Sumber tegangan 8,22 GND Ground
14,15,16,17, 18,19,9,10
Port B (PB7:0)
Masing-masing pin pada port B memiliki resistor pull-up internal dan dapat digunakan sebagai 8 bit I/O digital. pin PB6 dan pin PB7 terhubung dengan kristal 16 MHz, tidak digunakan sebagai I/O. Pin PB1 - pin PB3 dapat digunakan sebagai output PWM.
23,24,25,26, 27,28,1
Port C (PC6:0)
Masing-masing pin pada port C memiliki resistor pull-up internal dan dapat digunakan sebagai 7 bit I/O analog. Pin PC6 digunakan sebagai input reset , tidak digunakan sebagai I/O.
2,3,4,5,6,11, 12,13
Port D (PD7:0)
Masing-masing pin pada port D memiliki resistor pull-up internal dan dapat digunakan sebagai 8 bit I/O digital. Pin PD3 dapat digunakan sebagai output PWM. Konfigurasi alternatif port D dapat dilihat pada Tabel 2.2
20 AVcc Sumber tegangan untuk konversi analog ke digital 21 Aref Tegangan referensi untuk konversi analog ke digital
2.3 Arduino Uno
Arduino adalah sebuah kit elektronik open source yang dirancang khusus untuk memudahkan setiap orang dalam belajar membuat robot atau mengembangkan perangkat elektronik yang dapat berinteraksi dengan bermacam-macam sensor dan pengendali[9].
10
width modulation(PWM)) dan 6 pin input analog, koneksi USB (Universal Serial Bus), dan
osilator 16 MHz. Pin input analog dapat dipakai sebagai pin input digital.
Gambar 2.6 Modul Arduino Uno[11]
Pada gambar di bawah ini dapat dilihat konfigurasi pin dari mikrokontroler ATmega 328. Fungsi masing-masing port Arduino pada Gambar 2.7 dapat dilihat pada Tabel 2.1.
Gambar 2.7 Konfigurasi pin ATmega328 pada Arduino Uno[12]
Spesifikasi board Arduino Uno dapat dilihat sebagai berikut :
Mikrokontroler : ATmega 328
Operating voltage : 5 Volt
Input Voltage (recommended) : 7-12V
Input Voltage (limits) : 6-20V
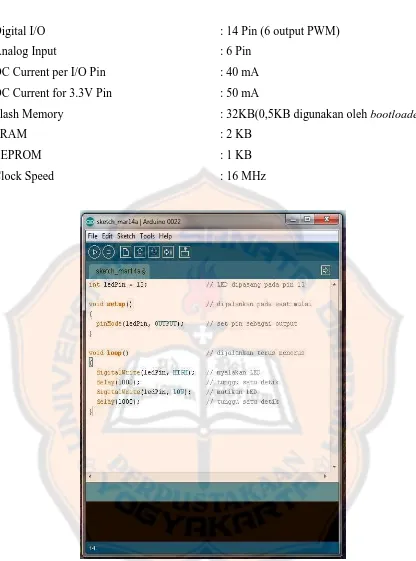
Digital I/O : 14 Pin (6 output PWM)
Analog Input : 6 Pin
DC Current per I/O Pin : 40 mA
DC Current for 3.3V Pin : 50 mA
Flash Memory : 32KB(0,5KB digunakan oleh bootloader)
SRAM : 2 KB
EEPROM : 1 KB
[image:30.595.92.508.47.608.2]Clock Speed : 16 MHz
Gambar 2.8 Tampilan pemrograman Arduino
12
2.4 Visual Basic
Visual basic merupakan suatu bahasa pemrograman yang dikembangkan dari bahasa pemrograman BASIC (Beginners All-Purpose Symbolic Instruction Code) . Perbedaan antara Visual Basic dengan bahasa BASIC adalah pemrograman BASIC masih berorientasi pada text dan program dijalankan secara berurutan. Untuk itu bahasa BASIC disebut sebagai Interpreter. Sedangkan dalam Visual Basic dengan lingkungan grafiknya, pemrograman berorientasi obyek dan sudah merupakan compiler. Karena alasan inilah, banyak programmer baik yang sudah mahir maupun yang baru belajar bahasa pemrograman lebih senang menggunakannya.
Kelebihan lain dari Visual Basic adalah kemampuannyan untuk mengkompilasi program dalam bentuk Native Code, yaitu optimasi pada saat prosesor mengkompilasi dan menjalankan program tersebut. Keuntungan yang didapat dari Native Code adalah kecepatannya dalam mengakses program, dimana hal ini hanya dapat ditemui pada aplikasi-aplikasi yang di-kompilasi dengan bahasa pemrograman C++[13].
Dalam segi komunikasi, terdapat dua cara yang disediakan Visual Basic. Komunikasi dapat dilakukan dengan menggunakan fitur langsung yang diberikan oleh Visual Basic (MSComm 6.0) dan juga dapat dilakukan dengan USART (menggunakan IC USART).
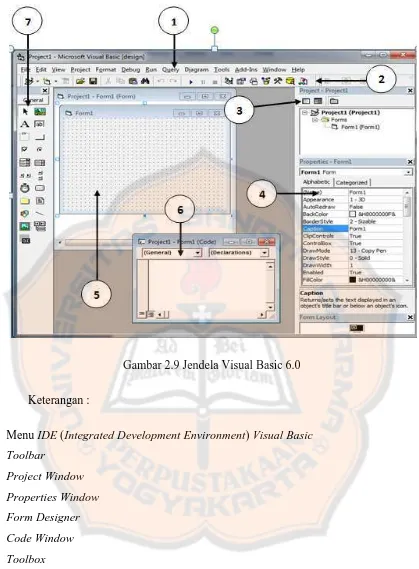
Pada Gambar 2.9 memberikan gambaran mengenai jendela Visual Basic 6.0. Tampilan di atas akan ditemui ketika bekerja menggunakan Visual Basic 6.0. Ada beberapa pengertian dasar yang harus dimengerti ketika akan bekerja menggunakan Visual Basic [13], yaitu :
a. Control, yaitu objek yang akan digunakan dalam pemrograman antarmuka. Kontrol
yang digunakan adalah kontrol yang terdapat pada toolbox.
b. Event, adalah aksi yang diberikan pada suatu kontrol, misalnya click pada kontrol
tombol.
c. Methods, adalah metode yang digunakan sebelum suatu objek diberi aksi, misalnya
hide, visible,load, dan seterusnya.
d. Object, disebut dengan objek jika suatu kontrol diberikan suatu aksi, karakteristik dan
metode tertentu.
e. Procedure, adalah sekumpulan perintah, fungsi urut-urutan bagaimana suatu program
dijalankan.
f. Properties, yaitu karakteristik yang melekat pada suatu objek. Misalnya karakteristik
huruf, warna, bentuk, dan seterusnya.
Gambar 2.9 Jendela Visual Basic 6.0
Keterangan :
1. Menu IDE (Integrated Development Environment) Visual Basic 2. Toolbar
3. Project Window
4. Properties Window
5. Form Designer
6. Code Window
7. Toolbox
2.5 Kinematika dan Dinamika
suatu benda bergerak. Sed mempelajari tentang gaya menggambarkan gerak suat jika kita ingin menghubung juga sifat / karakteristik permasalahan dinamika[14]
[image:33.595.89.528.343.650.2]Hubungan yang seri kecepatan serta percepatan. akan dipergunakan adalah t posisi ke posisi lainnya y linear dan pergerakan ro menggerakkan lengan robo lainnya. Pergerakan motor adalah analisa kinematik un kita mempunyai data koordi
Gambar 2.10 K Gambar 2.10 menjela gerakan rotasi dari lengan 1 yang terletak pada koordina
edangkan dinamika adalah suatu cabang ilm a yang menyebabkan pergerakan suatu bend atu benda, maka kita membatasi diri pada kine ungkan gerak suatu benda terhadap gaya-gaya tik benda yang bergerak tersebut, maka
].
ering dipakai dalam konteks kinematika ad an. Dalam pembuatan lengan robot ini, konse h tentang perpindahan. Kaitan perpindahan sua yaitu pergerakan. Pergerakan dibagi menjad
rotasi Sebagai contohnya ketika motor obot, akan terjadi perpindahan sudut dari pos or tersebut termasuk dalam pergerakan rotasi.
untuk mendapatkan besar sudut dari masing rdinat posisi (x,y,z)[15].
Konfigurasi robot tangan planar 2 sendi (2 DO elaskan mengenai perhitungan kinematika mun
n 1 dan lengan 2). Jika kedudukan lengan suat inat (x,y) dinyatakan sebagai P(x,y)[16], maka :
14
ilmu mekanika yang nda. Jika kita hanya inematika; sedangkan ya penyebabnya dan a kita menghadapi
adalah perpindahan, nsep kinematika yang uatu benda dari suatu jadi dua, pergerakan r digerakkan untuk posisi satu ke posisi i. Inverse Kinematic g – masing joint jika
DOF)[16]
undur untuk 2 DOF ( uatu titik yaitu titik P
a :
, , ... (2.2) Jika titik P adalah vektor penjumlahan lengan 1( ,) dan lengan 2( ,), maka :
cos , sin ... (2.3)
cos , sin ... (2.4)
cos cos ... (2.5)
sin sin ... (2.6)
Dengan menggunakan rumus identitas trigonometri pada persamaan 2.7 dan Persamaan 2.8 maka didapatkan besarnya nilai x dan y:
cos cos cos sin sin ... (2.7)
sin sin cos sin cos ... (2.8)
cos cos cos sin sin ... (2.9)
sin sin cos cos sin ... (2.10)
Dengan menggunakan rumus trigonometri dan persamaan 2.9 serta 2.10, besarnya yaitu :
cos ... (2.11)
arccos # $ ... (2.12)
tan &'( )&'() . (+, ). (+, ) ... (2.13)
arctan # &'( )&'( ) . (+, ). (+, ) $ ... (2.14)
Misal :
Titik P (x,y) : (100,50) dengan l1 = 150 mm dan l2 = 100 mm, maka besarnya nilai dan
yaitu :
arccos -100 502.150.100150 100 2
arccos 0)
131,8°
16
arctan 64167,34 7454,764167,34 7454,76:
arctan 64167,34 7454,764167,34 7454,76:
arctan 611621,76 : 3287,42
arctan 0,28
29,7°
2.6 Motor Stepper
Motor stepper adalah salah satu jenis aktuator untuk rotary motion. Perbedaan mendasar antara motor stepper dan motor DC magnet permanen adalah bila motor DC magnet permanent menggunakan gaya lawan untuk menolak kutub magnet, motor stepper justru menggunakan gaya tarik untuk menarik kutub magnet yang berlawanan sedekat mungkin ke posisi kutub magnet yang dihasilkan oleh kumparan[16].
Motor stepper bekerja dalam bentuk digital[17]. Motor stepper mengubah pulsa-pulsa listrik yang diberikan dan menjadikannya gerakan-gerakan diskrit rotor yang kemudian kita sebut dengan langkah (step)[18]. Karena pergerakannya berupa langkah-langkah (step) inilah maka motor ini dinamakan stepper. Motor akan berputar sesuai dari banyaknya pulsa yang diberikan. Dengan kata lain, banyaknya pulsa akan merepresentasikan berapa banyaknya putaran motor stepper.
;<=> BCDE FGH D?@A ... (2.1)
Dari persamaan 2.1 di atas[30], nilai step (pulsa) adalah jumlah pulsa yang digunakan untuk menggerakan motor stepper sebanyak satu putaran penuh dengan step angle tertentu.
Step angle adalah sudut yang dapat digerakkan motor stepper setiap pemberian satu pulsa.
Nilai 360° adalah sudut satu putaran penuh. Misal :
Jika S = 0,9° , motor stepper digerakkan untuk sudut 30°, maka jumlah pulsa yang diberikan sebanyak :
;<=> 0,9°/>K L360
;<=> 400 pulsa
Motor stepper akan berputar satu putaran penuh jika diberi pulsa sebesar 400 pulsa. Jika motor stepper akan digerakkan sebesar 30° saja, maka jumlah pulsa yang diberikan :
Pulsa = (30°/360°) x 400 = 33,33 pulsa
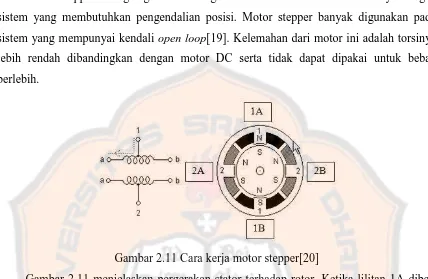
[image:36.595.88.516.159.438.2]Motor stepper sering digunakan sebagai aktuator terlebih dalam kaitannya dengan sistem yang membutuhkan pengendalian posisi. Motor stepper banyak digunakan pada sistem yang mempunyai kendali open loop[19]. Kelemahan dari motor ini adalah torsinya lebih rendah dibandingkan dengan motor DC serta tidak dapat dipakai untuk beban berlebih.
Gambar 2.11 Cara kerja motor stepper[20]
Gambar 2.11 menjelaskan pergerakan stator terhadap rotor. Ketika lilitan 1A diberi pulsa, maka antara rotor dan kutub nomor 1A akan terjadi gaya tolak. Selanjutnya lilitan 2B, kemudian lilitan 1B diberi pulsa, akan terjadi gaya tolakan juga antara rotor dan kutub 2B. Jika pemberian pulsa diberikan secara terus menerus, maka rotor akan berputar terus menerus sesuai dengan pulsa yang diberikan ke lilitan 1 (1A,1B) dan lilitan 2 (2A,2B).
18
[image:37.595.102.492.68.747.2]Gambar 2.12 Mode fullstep[22]
Gambar 2.13 Mode halfstep[22]
2.7 Driver Motor Stepper
Rangkaian driver adalah interface (antarmuka) antar rangkaian satu dengan rangkaian yang lainnya. Rangkaian driver dibutuhkan untuk menjembatani keluaran dari satu rangkaian ke rangkaian yang mempunyai beda impedansi. Driver motor stepper adalah rangkaian yang digunakan untuk menjembatani antara rangkaian pengendali motor stepper dan motor stepper (rangkaian penggerak motor stepper). Ada banyak macam driver motor stepper, di antaranya menggunakan IC L293. L293 adalah IC untuk pengendalian motor (DC ataupun stepper). IC L293 merupakan sebuah IC Half Bridge. L293 dapat dipakai untuk menggerakkan dua buah motor DC atau satu buah motor stepper. Untuk karakteristik lain L293 dapat dilihat pada datasheet.
2.8 MOSFET
MOSFET(Metal Oxide Semiconductor Field Effect Transistor) adalah piranti elektronika yang dikendalikan oleh tegangan dan hanya membutuhkan arus masukan yang kecil untuk dapat aktif. MOSFET hampir sama dengan transistor bipolar lainnya, yang mempunyai tiga buah kaki. Jika di dalam transistor bipolar dikenal kaki Basis(B),
Collector(C), dan Emitter(E), MOSFET mempunyai kaki Gate(G), Source(S), dan
Drain(D). MOSFET menggunakan tegangan pada Gate(=Basis) untuk mengontrol arus
antara terminal Source(=Emittor) dan Drain(=Collector). Prinsip dasar cara kerja MOSFET sama dengan transistor bipolar. Arus yang mengalir dari Drain ke Source dikendalikan oleh tegangan antara Gate dan Source(MNB).
2.9 Optocoupler
Optocoupler atau Optoisolator adalah komponen elektronika yang dipakai untuk
isolasi listrik (electrical isolation) antara rangkaian input dan output[23]. Optocoupler terdiri dari penggabungan sebuah sumber cahaya dan foto transistor[24]. Dioda cahaya sebagai sumber cahaya langsung ke sumber tegangan. Optocoupler bekerja berdasarkan sumber cahaya dari dioda cahaya ke fotodioda atau fototransistor.
2.10 Limit switch
Limit switch atau sering juga disebut saklar batas adalah saklar yang dapat
20
kontak yang tadinya NC menjadi NO, begitu juga sebaliknya. Ketika roller dilepas, maka
Limit switch akan kembali ke keadaan awal. Bentuk fisik limit switch bermacam-macam.
[image:39.595.90.511.148.370.2]Salah satu bentuk dari limit switch dapat dilihat pada Gambar 2.14.
Gambar 2.14 Gambar limit switch[25]
2.11 Pengendalian Sistem Untai Terbuka
Konsep dasar dalam pengendalian suatu sistem berasal dari adanya masukan, yang kemudian dari masukan tersebut diolah melalui suatu proses pengendalian dan hasilnya nanti akan menghasilkan suatu keluaran. Pengendalian dibedakan menjadi dua, ada pengendalian untai terbuka (open loop) dan pengendalian untai tertutup (closed loop). Perbedaan dari kedua jenis pengendalian tersebut terletak pada ada atau tidaknya umpan balik (feedback) dari keluarannya. Feedback terdapat pada sistem untai tertutup. Sedangkan sistem pengendalian untai terbuka tidak terdapat feedback, sehingga ketepatan suatu sistem tergantung pada proses kalibrasi[26]. Sistem untai terbuka diartikan suatu kontrol yang tidak dipengaruhi oleh outputnya[27]. Model dari sistem pengendalian untai terbuka dapat dilihat dari Gambar 2.15 :
Gambar 2.15 Model pengendalian untai terbuka
2.12 Sistem Pneumatik
Pneumatik berasal dari bahasa Yunani yang berarti udara/angin. Sistem pneumatik sendiri diartikan sebagai suatu sistem yang menggunakan udara/angin sebagai penggerak dan transmisi, baik secara linear maupun juga secara rotational[28]. Sistem ini masih
sering digunakan dalam dunia industri, dikarenakan dari segi harga terhitung lebih murah dibandingkan dengan menggunakan sistem hidrolik (fluida). Ringkasnya, cara kerja sistem pneumatik adalah dengan memampatkan udara dan kemudian akan menghasilkan tekanan yang dapat dipakai sebagai media penggerak maupun media transmisi. Komponen-komponen yang erat hubungannya dengan sistem ini seperti piston atau cylinder, preasure
gauge, air filter regulator, solenoide valve, dll. Runtutan (sequence) cara kerja sistem
[image:40.595.92.499.217.526.2]pneumatik dapat dilihat pada Gambar 2.16.
Gambar 2.16 Diagram alir sistem pneumatik[29] a. Piston (Cylinder)
Silinder atau juga sering disebut piston merupakan bagian aktuator akhir dari output sebuah sistem pneumatik. Silinder pada sistem pneumatik dibedakan menjadi dua, yaitu silinder aksi tunggal (Single Acting Cylinder) dan silinder aksi ganda (Double Acting
Cylinder). Perbedaan antara silinder aksi tunggal dan silinder aksi ganda adalah jika pada
22
Gambar 2.17 Gambar silinder aksi tunggal[29]
Gambar 2.18 Gambar silinder aksi ganda[29] b. Katup (Valve)
Dalam sistem kerja pneumatik, komponen ini dapat dikatakan sebagai salah satu komponen utama. Katub atau valve pneumatik adalah komponen pengontrol ataupun pengatur, baik untuk memulai (start), menghentikan (stop), dan arah angin[30]. Dalam penggunaanya, katub dibedakan menjadi beberapa macam, yaitu :
1.) Katup Pengarah (Directional Control Valve) 2.) Katub Searah (Non-Return Valve)
3.) Katup Pengatur Aliran (Flow Control Valve) 4.) Katub Pengatur Tekanan (Preasure Valve) 5.) Katub Penutup (Shut-Off Valve)
6.) Katub Kombinasi (Combination Valve)
Dari keenam jenis katub di atas, bagian yang paling sering dipakai oleh konsumen adalah katub penyearah (Directional Control Valve). Katub pengarah adalah perlengkapan yang menggunakan lubang-lubang saluran kecil yang akan dileawati oleh aliran angin, terutama untuk memulai, menghentikan serta mengarahkan aliran angin tersebut. Katub penyearah juga diartikan sebagai alat atau instrumentasi pneumatik yang berfungsi sebagai saklar aliran angin [30].
Dalam rangkaian listrik, simbol-simbol dibuat untuk memudahkan pengenalan komponen pada rangkaian. Hal yang sama juga terdapat pada katub penyearah. Dalam katub penyearah dibuat simbol-simbol untuk memudahkan dalam membuat maupun
mengenali rangkaian. Simbol-simbol yang terdapat pada katub penyearah dapat dilihat pada Gambar 2.19 dan Gambar 2.20.
24
Gambar 2.20 Ringkasan katup penyearah dari macam-macam katup pneumatik[29]
Sebagai fungsi memulai, menghentikan dan, mengarahkan aliran, katub memerlukan sebuah penggerak kontrol. Penggerak kontrol katub penyearah dibedakan menjadi beberapa macam. Macam-macam pengontrolan katub penyearah Gambar 2.21, Gambar 2.22, Gambar 2.23, dan Gambar 2.24.
[image:43.595.84.518.476.709.2]1. Dikontrol secara manual
Gambar 2.21 Jenis kontrol katup secara manual[29]
2. Dikontrol secara mekanik
Gambar 2.22 Jenis kontrol katup secara mekanik[29]
3. Dikontrol oleh tekanan angin
Gambar 2.23 Jenis kontrol katup secara pneumatik[29]
4. Dikontrol secara elektrik (elektropneumatik)
Gambar 2.24 Jenis kontrol katup secara elektrik[29] c. Sucker
Sucker adalah salah satu macam end effector yang sering dipakai ketika benda kerja
26 BAB III
RANCANGAN PENELITIAN
Pada bab ini akan dijelaskan mengenai perancangan pembuatan “SCARA dalam sistem Pick and Place benda kerja” mulai dari diagram alir sistem, perancangan hardware baik dari segi mekanik maupun elektriknya, dan juga perancangan perangkat lunak.
3.1 Diagram Block Sistem
Perancangan diagram blok sistem “SCARA berbasis Arduino dan Visual Basic 6.0 dalam sistem pick and place benda kerja” ditunjukkan pada Gambar 3.1 :
Gambar 3.1 Diagram block sistem
Diagram block penelitian pada Gambar 3.1 menunjukkan runtutan cara kerja sistem
SCARA. Sistem terdiri dari empat bagian utama, yaitu input (Visual Basic 6.0 dan limit
switch), kendali (mikrokontroler), dan ouput (aktuator dan rangkaian driver aktuator).
Input dari Visual Basic 6.0 adalah input posisi yang diberikan oleh pengguna. Sedangkan
input yang berasal dari limit switch adalah input untuk memberikan batas maksimal
pergerakan lengan. Pada bagian output, motor stepper satu adalah aktuator untuk lengan pertama dan motor stepper dua adalah aktuator lengan kedua. Sedangkan pneumatik satu adalah aktuator lengan ketiga dan pneumatik dua adalah aktuator untuk end effector lengan robot.
Kendali utama sistem berada di Mikrokontroler ATmega328. Visual Basic 6.0 digunakan sebagai user interface SCARA. Data yang dimasukkan oleh user melalui user
interface akan diolah menjadi perubahan gerakan motor dalam satuan derajat oleh Visual
Basic. Perhitungan posisi dari Cartesian (x dan y) diubah menjadi sudut dilakukan di Visual Basic agar tidak membebani kerja dari Mikrokontroler. Komunikasi antara board Arduino dan Visual Basic 6.0 menggunakan port USB yang terdapat pada ATmega328.
Setelah menerima data berupa sudut, mikrokontroler akan mengendalikan gerakan motor yaitu arah putaran motor, banyaknya pulsa, dan kecepatan putaran motor. Untuk aktuator pneumatik ( silinder dan sucker), keduanya akan dijalankan menggunakan fungsi
timer. Setelah target posisi tercapai, selang dua detik sistem pneumatik akan dijalankan.
Setelah mencapai posisi maksimal silinder, maka sucker akan diaktifkan selang dua detik kemudian.
3.2 Perancangan Hardware
Hardware menjadi salah satu bagian paling penting untuk membangun suatu sistem
lengan robot sehingga sistem dapat berjalan dengan baik. Pada penelitian ini, hardware dibagi dalam dua kategori, yaitu :
3.2.1 Hardware Mekanik
Hardware mekanik berisi komponen-komponen mekanik yang disusun membentuk
suatu sistem mekanik yang berupa lengan robot. Komponen penyusun lengan robot pada sistem SCARA terlihat seperti pada Gambar 3.2, Gambar 3.3, Gambar 3.4, dan 3.5.
28
Gambar 3.3 Gambar meja untuk SCARA
[image:47.595.95.496.401.734.2]Gambar 3.3 adalah meja tempat meletakan robot. Seluruh komponen sistem akan diletakkan pada meja ini, termasuk rangkaian-rangkaian elektronika yang dibutuhkan oleh sistem.
Gambar 3.4 adalah g digunakan untuk melihat p kotak-kotak yang menginte Setiap kotak pada millime menjadi beberapa block lag di atas meja dasar dengan d
Gambar 3.5 Rancan
Gambar 3.5 memberi oleh robot.Area kerja robo dikurangi luas dari setenga yang sebesar 150 mm dan
mm2. Di dalam Gambar 3.5 nol untuk masing-masing le
3.2.2 Hardware Elektronik
Perancangan Hardwa dikarenakan hardware elek
h gambar rancangan milimeter block. Milime t posisi secara real di dalam plant. Milimeter ntepretasikan satuan yang dipakai sebagai koor
meter block memiliki dimensi 5 cm x 5 cm lagi dengan dimensi 10 mm x 10 mm. Milimete
dilapisi oleh akrilik sebagai pelindung kertas m
cangan area kerja serta penentuan zero point len
erikan gambaran awal mengenai area kerja yan bot besarnya adalah selisih dari luas setenga gah lingkaran kecil. Dari dimensi panjang le n 100 mm, maka didapatkan luas area kerjany .5 juga memberikan gambaran mengenai letak lengan.
nika
ware elektronika diperlukan dalam penyusu
lektronika merupakan salah satu pembangun
meter block tersebut ter block terdiri dari ordinat lengan robot.
cm, yang dibagi lagi
eter block diletakkan s millimeter block.
lengan robot
yang dapat dilakukan ngah lingkaran besar lengan satu dan dua anya seluas ± 193,35 ak dari koordinat titik
30
agar sistem dapat dikendalikan dan digerakkan. Komponen penyusun hardware elektronika meliputi rangkaian pengendali, rangkaian penggerak (driver), dan rangkaian sensor. Hardware elektronika yang menyusun sistem SCARA meliputi rangkaian-rangkaian elektronika yaitu :
[image:49.595.103.507.176.502.2]3.2.2.1 Minimum System ATmega328
Gambar 3.6 Minimum system ATmega328
Gambar 3.6 menjelaskan mengenai minimum system ATmega 328. Penjelasan tersebut meliputi pin input/output dari ATmega 328 yang terhubung ke input/output sistem.
Output berupa aktuator yaitu dua buah motor stepper dan dua buah penggerak sistem
pneumatik. Input berupa limit switch yang dipakai sebagai sensor yang akan memberikan batasan gerakan lengan robot terhadap area kerja maksimal yang dapat dijalankan oleh lengan robot.
3.2.2.2 Driver Motor Stepper
Rangkaian driver motor stepper diperlukan sebagai driver antara pin output Arduino dengan motor stepper. Rangkaian driver motor stepper dipakai sebagai interface antara keluaran Arduino dengan motor stepper. Driver motor stepper pada penelitian ini menggunakan IC L293. Pemilihan IC L293 dikarenakan IC L293 dapat dipakai untuk menggerakan motor yang mempunyai arus kerja cukup tinggi.
Tabel 3.1 mengidenti Tabel 3.1 dapat dilihat bahw
output Arduino terhubung d
penyambungan antara kelua dilihat pada Gambar 3.7.
Tabe
Ga
ntifikasikan wiring antara port Arduino dan p ahwa pada intinya koneksi antara pengendali da
g dengan kaki-kaki input dari IC L293. Untuk luaran port Arduino dan L293 serta kaki-kaki m
abel 3.1 Alokasi pin ATmega328 dengan L293
Gambar 3.7 Rangkaian driver motor stepper
port IC L293. Pada
32
3.2.2.3 Limit switch
Limit switch dipakai sebagai sensor untuk membatasi gerak maksimal yang dapat
[image:51.595.87.498.226.439.2]dilakukan oleh lengan robot. Bila roller pada limit switch tertekan, maka kontak NO yang terhubung ke Arduino akan menjadi NC dan akan memberikan inputan ke Arduino. Keluaran limit switch terhubung langsung dengan inputan port masukan Arduino. Pengalokasian port Arduino dengan limit switch dapat dilihat pada Tabel 3.2.
Tabel 3.2 Alokasi Pin ATmega328 dengan L293
3.2.2.4 Elektropneumatik
Rangkaian driver elektropneumatik pada penelitian ini ada dua rangkaian. Rangkaian dapat dilihat pada Gambar 3.8 dan Gambar 3.9 .Gambar 3.8 adalah rangkaian driver solenoide untuk silinder pneumatik. Gambar 3.9 adalah gambar rangkaian solenoide untuk
vacumm generator yang akan menggerakkan sucker. Tabel 3.3 menunjukkan
pengalokasian pin output Arduino dengan solenoide satu dan dua.
Gambar 3.8 Driver untuk solenoide silinder[14] Komponen Elektronika :
1. IRFZ44N : 1
2. 4N27 : 1
3. Dioda 1N4148 : 1 4. Resistor 330 : 1 5. Resistor 1K : 1 6. Resistor 3K9 : 1
34
Komponen Elektronika :
1. IRFZ44N : 1
2. 4N27 : 1
[image:53.595.91.508.73.546.2]3. Dioda 1N4148 : 1 4. Resistor 330 : 1 5. Resistor 1K : 1 6. Resistor 3K9 : 1
Gambar 3.10 Diagram sistem pneumatik
Gambar 3.10 menjelaskan mengenai wiring serta diagram pneumatik dari sistem
SCARA. Pengendalian komponen pneumatik menggunakan
komponen-komponen elektropneumatik. Komponen-komponen-komponen elektropneumatik akan menerima masukan yang berasal dari driver pneumatik. Berikut disajikan kebutuhan-kebutuhan komponen pneumatik dan elektropneumatik dari sistem SCARA :
1. 3/2 Way Single Acting Solenoide : 2 2. Single Acting Sylinder : 1
3. PE Coverter : 1
4. Vacuum Generator : 1
5. Sucker : 1
6. Fitting : 1
7. Selang pneumatik : secukupnya
3.3 Perancangan Perangkat Lunak
Perancangan perangkat lunak dimaksudkan sebagai user interface SCARA dengan operator. Perangkat lunak yang dipakai menggunakan Visual Basic 6.0. Komunikasi antara
User Interface dengan robot menggunakan komunikasi serial melalui port USB (Universal
Serial Bus). Board Arduino Uno dilengkapi dengan port komunikasi serial sehingga tidak
diperlukan lagi rangkaian tambahan untuk menggomunikasikan keduanya.
Perancangan perangkat lunak difungsikan untuk memudahkan pemrograman Visual Basic 6.0 dan Arduino. Perancangan perangkat lunak terdiri dari perancangan tampilan program Visual Basic 6.0 dan diagram alir program.
[image:54.595.89.522.273.660.2]3.3.1. Perancangan Tampilan Program Visual Basic
Gambar 3.11 Tampilan Visual Basic 6.0
36
data posisi baik itu posisi awal benda kerja dan posisi akhir benda kerja yang akan dilakukan oleh SCARA, kecepatan SCARA, dan jumlah pengulangan posisi. Selain itu, dari
GUI, pengguna dapat menyimulasikan terlebih dahulu atas masukan perintah (posisi) yang
[image:55.595.102.512.218.738.2]telah dimasukkan oleh pengguna. Simulasi merupakan gambaran awal gerakan SCARA sebelum masukan dari pengguna dikirim dan dijalankan pengendali.
Tabel 3.4. Objek pada tampilan GUI
3.3.2. Diagram Alir Program Visual Basic
Gambar 3.12 Diagram alir GUI (Graphical User Interface)
38
Gambar 3.12 menjelaskan mengenai diagram alir user interface yang berupa aplikasi VB. Runtutan diagram alir tersebut yaitu pada saat aplikasi VB ini dijalankan, VB akan mengecek ada atau tidaknya penekanan tombol Exit. Jika tombol tersebut ditekan, maka jendela aplikasi ini akan ditutup. Jika tombol ini tidak ditekan, lalu VB akan menunggu masukan berupa koordinat yang diberikan user pada frame Input posisi 2R.
Jika tombol Save Posisi ditekan, maka data yang diberikan oleh user akan disimpan dan ditampilkan pada frame Data Posisi. Data posisi yang ditampilkan berupa koordinat masukan x dan y. Jika tombol Save Posisi tidak ditekan, maka program akan melakukan pengecekan kembali penekanan tombol Exit.
Terdapat tombol Tambah Posisi untuk menambahkan posisi yang akan dituju oleh lengan robot. Jika tombol ini ditekan maka program akan membaca masukan inputan posisi kembali. Jika tombol ini tidak ditekan, maka program akan menunggu user memberikan kecepatan motor pada frame Kecepatan Motor. TextBox Kecepatan Motor akan menampilkan kecepatan motor yang diberikan oleh user melalui SchorlBar
Kecepatan Motor.
Selanjutnya, pada frame gerakan 1P dilakukan pengecekan ada atau tidaknya penekanan tombol gerakan aktuator pneumatik. Jika tombol tersebut tidak ditekan, maka program akan membaca kembali ada tidaknya penekanan tombol pada On frame Gerakan
1P. Jika tombol On ditekan, maka program akan dilanjutkan dengan membaca ada atau
tidaknya penekanan tombol Simulasi On pada frame Simulasi. Jika tidak ada penekanan, maka program akan terus membaca ada atau tidaknya penekanan. Jika ada penekanan tombol tersebut, maka program melanjutkan pengecekan tombol Simulasi Off. Jika tombol
Simulasi Off tidak ditekan, maka program akan terus menjalankan simulasi sesuai data
yang diberikan atau tertampil pada frame Data Posisi. Jika tombol Simulasi Off ditekan, maka program akan melakukan pengecekan kondisi ada atau tidaknya penekanan tombol
Kirim Data ke Mikrokontroler pada frame Kirim Data. Jika tidak ada penekanan, maka
program terus melakukan pengecekan penekanan tombol Kirim Data ke Mikrokontroler. Jika penekanan tombol dilakukan, maka program akan mengirim data ke mikrokontroler.
Data yang dikirimkan berupa jumlah pulsa yang diperlukan oleh motor stepper. Perhitungan konversi posisi dari koordinat cartessian ke bentuk sudut kemudian ke bentuk pulsa yang dibutuhkan untuk menggerakkan motor stepper dilakukan di dalam program VB. Sehingga, data yang dikirimkan ke Arduino nantinya hanya berupa banyaknya jumlah pulsa. Nilai dari pulsa akan dibulatkan ke atas jika hasil perhitungannya menghasilkan nilai bukan bilangan bulat. Contoh pembulatan dapat dilihat pada contoh halaman empat belas
(14). Persamaan yang dipakai untuk mengubah koordinat dari cartessian ke degree menggunakan Persamaan 2.12 dan 2.14 . Persamaan yang dipakai untuk mengubah nilai sudut ke jumlah pulsa menggunakan Persamaan 2.1.
Gambar 3.13 Diagram alir simulasi
Gambar 3.13 memberikan gambaran mengenai diagram alir atau flowchart untuk simulasi GUI. Pada prinsipnya, simulasi ini dibuat sedemikian hingga akan memberikan gambaran awal unjuk kerja dari plant. Plant yang dimaksud di sini adalah SCARA. Simulasi akan memberikan gambaran mengenai titik-titik yang akan dituju oleh robot.
3.3.3. Program Arduino
40
Gambar 3.14 Program Arduino
[image:59.595.93.516.329.720.2]Gambar 3.15 akan menjelaskan rincian dari sub rutin program arduino pertama, Arduino akan melakukan initialisasinya. Arduino menerima data dari Visual Basic 6.0 berupa pulsa. Arduino dalam penelitian ini dipakai sebagai pengendali I/O. Seperti sudah dikatakan pada halaman sebelumnya, perhitungan-perhitungan yang dibutuhkan untuk menggerakan SCARA dilakukan di dalam Visual Basic 6.0.
Gambar 3.15 Diagram alir Arduino posisi 1
Gambar 3.15 (lanjutan) Diagram alir Arduino posisi 2 3.3.4. Subrutin Limit switch
42
Gambar 3.16 menjelaskan mengenai diagram alir subrutin limit switch. Seperti yang sudah dikatakan di awal bahwa limit switch dipakai sebagai indikator bila posisi yang diberikan pengguna melebihi area kerja dari lengan robot. Oleh karena itu, ketika limit
switch memberikan input pada Arduino, maka Arduino akan memerintahkan motor untuk
berhenti dan pada GUI akan muncul Message Box yang menjelaskan bahwa posisi yang dimasukkan melebihi area kerja dari SCARA. Ketika tombol “OK” pada Message Box ditekan, maka sistem akan reset posisi kembali ke posisi awal (posisi awal lengan robot pada titik (0,0)).
HA
Bab ini berisi hasi
Articulated Robot Arm (SC
place benda kerja. Penga
mekanik, hardware secara e
4.1.
Hardware Mekanik Pengamatan dan pemRobot Arm (SCARA) berba
kerja terdiri dari bentuk me
assembly seluruh bagian me
4.1.1
Bentuk Meja
Gambar 4.1 menunju membuat meja ini yaitu meletakkan plant SCARA, modul sehingga dapat dipi saat perancangan. Yang m meja lebih besar, yaitu : 60 kesalahan dalam pembuatanGambar 4.1
43
BAB IV
HASIL DAN PEMBAHASAN
asil pengamatan dan pembahasan dari Se
SCARA) berbasis Arduino dan Visual Basic 6
gamatan dan pembahasan meliputi bentuk a elektrik, software, dan tingkat keberhasilan.
nik
embahasan hardware mekanik Selective Com basis Arduino dan Visual Basic 6.0 untuk pic meja, bentuk hardware SCARA, bentuk grid ko mekanik.
jukkan gambar plant dari SCARA. Material y u kayu. Meja tersebut berfungsi selain seba , digunakan juga untuk mempermudah mobi ipindah-pindah. Meja ini secara konsep sama membedakan meja tersebut dengan perancang
60 cm x 60 cm x 100 cm. Perbedaan ukuran d tan.
4.1 Gambar meja tempat plant SCARA diletakka
Selective Compliant
6.0 untuk pick and uk hardware secara
ompliant Articulated
pick and place benda
koordinat posisi dan
l yang dipakai untuk ebagai tempat untuk obilitas plant sebagai a dengan gambaran angan adalah ukuran n dikarenakan adanya
4.1.2
Bentuk Hardwar
G Gambar 4.2 menunju modul, SCARA, komponen
4.1.3
Bentuk Grid Ko
Gambar 4.3 menunju benda kerja. Luas total dar kecil. Masing-masing kotak terdiri dari garis vertikal da dengan garis yang lainnya sGa
are SCARA
Gambar 4.2 Gambar hardware SCARA
njukkan hardware SCARA secara keseluruhan n pneumatik, dan hardware elektrik.
oordinat Posisi
njukan gambar bentuk grid posisi untuk men ari grid posisi ini 10000 cm² yang terdiri dari tak kecil mempunyai luasan 25 cm². Di dalam k
dan garis horizontal yang mempunyai jarak ant a sebesar 1 cm.
Gambar 4.3 Gambar grid koordinat posisi
44
han mulai dari meja
4.1.4
Assembly Hardw
Gambar 4.4 Menunju lengan pertama 10 cm da pembuatan len
![Gambar 2.10 KKonfigurasi robot tangan planar 2 sendi (2 DODOF)[16]](https://thumb-ap.123doks.com/thumbv2/123dok/390859.222913/33.595.89.528.343.650/gambar-kkonfigurasi-robot-tangan-planar-sendi-dodof.webp)
![Gambar 2.13 Mode halfstep[22]](https://thumb-ap.123doks.com/thumbv2/123dok/390859.222913/37.595.102.492.68.747/gambar-mode-halfstep.webp)
![Gambar 2.14 Gambar limit switch[25]](https://thumb-ap.123doks.com/thumbv2/123dok/390859.222913/39.595.90.511.148.370/gambar-gambar-limit-switch.webp)
![Gambar 2.16 Diagram alir sistem pneumatik[29]](https://thumb-ap.123doks.com/thumbv2/123dok/390859.222913/40.595.92.499.217.526/gambar-diagram-alir-sistem-pneumatik.webp)
![Gambar 2.17 Gambar silinder aksi tunggal[29]](https://thumb-ap.123doks.com/thumbv2/123dok/390859.222913/41.595.82.520.71.559/gambar-gambar-silinder-aksi-tunggal.webp)
![Gambar 2.19 Cara menggambar dan membaca katub pneumatik[29]](https://thumb-ap.123doks.com/thumbv2/123dok/390859.222913/42.595.98.496.109.637/gambar-cara-menggambar-dan-membaca-katub-pneumatik.webp)
![Gambar 2.21 Jenis kontrol katup secara manual[29]](https://thumb-ap.123doks.com/thumbv2/123dok/390859.222913/43.595.84.518.476.709/gambar-jenis-kontrol-katup-secara-manual.webp)
