TUGAS AKHIR
PENGGUNAAN STRAIN GAUGE SEBAGAI SENSOR GAYA UNTUK MENINGKATKAN KINERJA SISTEM TRANSMISI
CONTINUOUSLY VARIABLE TRANSMISSION ( CVT )
Oleh : HERLAMBANG BAGUS P.
NRP 2108 100 506
Dosen Pembimbing Dr. Ir. Bambang Sampurno, MT.
NIP. 196509191990031003
JURUSAN TEKNIK MESIN
• Transmisi manual adalah sistem transmisi yang menggunakan perbandingan roda gigi transmisi dan dalam jumlah tingkatan tertentu.
• Transmisi CVT adalah sistem transmisi yang tidak menggunakan roda gigi. (contoh belt dan pulley)
Latar Belakang
Toroidal atau roller CVT
Latar Belakang
Electrical push belt
Latar Belakang
Beberapa Keunggulan :
• Pada CVT memiliki variasi rasio (i) transmisi yang banyak diantara harga ratio minimum – maksimum.
• CVT tidak adanya daya yang terbuang ketika proses perpindahan gigi seperti yang terjadi pada transmisi manual.
• CVT memiliki kesederhanaan dalam konstruksi.
Latar Belakang Kerugian :
• Faktor slip yang terjadi pada CVT belt dan pulley yang menyebabkan kinerja CVT menurun.
• Kapasitas Torsi Terbatas apabila dibandingkan dengan manual transmisi.
• Pada CVT tipe push belt, besarnya torsi yang dapat ditransmisikan tergantung gaya pencekaman pulley .
Sehingga pada tugas akhir ini digunakan strain gauge
sebagai sensor gaya pada fork screw untuk
Rumusan masalah
• Bagaimana merancang dan memilih komponen sensor gaya yang dapat digunakan pada push belt fork screw CVT.
• Bagaimana mengidentifikasi pengaruh putaran terhadap hasil gaya pencekaman fork screw dengan menggunakan strain gauge.
• Bagaimana memperoleh efisiensi transmisi yang lebih
baik.
• Untuk memperoleh rancangan sensor gaya yang sesuai untuk push belt fork screw CVT.
• Untuk mendapatkan data - data yang lebih lengkap mengenai pergerakan pulley.
• Untuk memperoleh efisiensi transmisi yang lebih baik.
Tujuan
Batasan masalah
• Model kendaraan yang dibuat dimodelkan simulasi yaitu analisa ½ chasis dan diharapkan nanti dapat diaplikasikan pada kendaraan
penumpang jenis city car pengerak FWD dengan daya mesin kurang lebih 37 HP dan isi silinder 1300 cc.
• Simulasi ½ chasis menggunakan putaran mesin 1 silinder dengan kapasitas 6.5 HP 100 cc sebagai pengganti mesin kendaraan.
• Analisa desain serta kekuatan rangka CVT dan chasis kendaraan tidak dibahas dalam penelitian ini.
• Jenis mekanisme pengatur rasio Continuous Variabel Transmission adalah menggunakan push belt dengan mekanisme Fork Screw yang digerakkan oleh motor DC.
• Pengujian pada prototipe pada kondisi kendaraan mulai berjalan.
Manfaat penelitian
• Mendapatkan rancangan sensor gaya yang sesuai sehingga mendapatkan sistem rasio CVT yang lebih optimal.
• Hasil yang diperoleh dari penelitian ini dapat menjadi referensi bagi peneliti lain dalam pengembangan CVT.
• Hasil yang diperoleh dari penelitian ini dapat membantu
masyarakat dalam mengetahui dan menganalisis prinsip
kerja dari CVT.
Kajian Pustaka
• Prasetyo (2007) mengembangkan CVT untuk penelitian Smart Car dengan menggunakan penggerak single actuator hidrolik. Pada pengembangan riset ini maka harga slip roda dipertahankan pada kondisi 20 % dan hasil yang diinginkan diperoleh 10 – 15%, namun losses rasio putaran rata – rata sebesar 70,3 % karena terjadi slip antara belt dan pulley, sistem kendali yang digunakan adalah Fuzzy.
• Widjokongko (2009) melakukan analisa dan perancangan sistem kendali tertutup dengan mode elektrik pada CVT untuk meningkatkan kinerja kendaraan. pengendalian ratio transmisi CVT yang digunakan adalah mekanisme fork screw CVT dengan 2 penggerak yang menghasilkan effisiensi torsi yang terjadi antara 67,12% - 70.26%.
CVT
CVT adalah salah satu metode pemindah daya yang memanfaatkan perubahan diameter dari puli penggerak (driver pulley) dan puli yang digerakkan (driven pulley)
4
6 5
8 7
1 2
3
CVT Push belt fork screw
1. Motor ICE 2. Flywheel
3. Belt CVT (Rubber Belt) 4. Driver Pulley
5. Mekanisme Push Belt Fork Srew
6. Motor DC sebagai penggerak Fork Srew.
7. Driven Pulley.
8. Shaft Input dan Output.
Strain gauge adalah komponen elektronika yang dipakai untuk mengukur regangan. Strain gage menghasilkan perubahan nilai tahanan yang proporsional dengan perubahan panjang atau jarak (length).
R Vin
Vout R1 2
Flowchart Penelitian
START
Perencanaan sensor gaya fork screw sistem Transmisi CVT
Simulasi Komputer
Pemilihan Komponen Data Parameter
pendukung (Throttle valve, putaran mesin, dll)
Rumusan Masalah
Observasi Kajian Pustaka
Pembuatan dan Assembly sensor gaya
A
Pengujian pada prototipe
Sesuai dengan yang diinginkan
Analisa hasil pengujian
TIDAK
YA
B
Prototipe CVT Push Belt Fork Screw
Defeksi fork screw Resistansi strain gauge Wheatstone bridge
Voltage Output Op-Amp (gain)
Voltage output X gain
Kenaikan / penurunan Volt = Gaya Pencekaman pada fork screw
Komponen Sensor Gaya
komponen pendukung yaitu :
3 buah resistor dengan resistansi 120 Ω
1 buah variable resistor 5 kΩ
1 buah resistor 10 kΩ
1 buah power supply 9, 15 Volt DC
Rangkaian Op-Amp
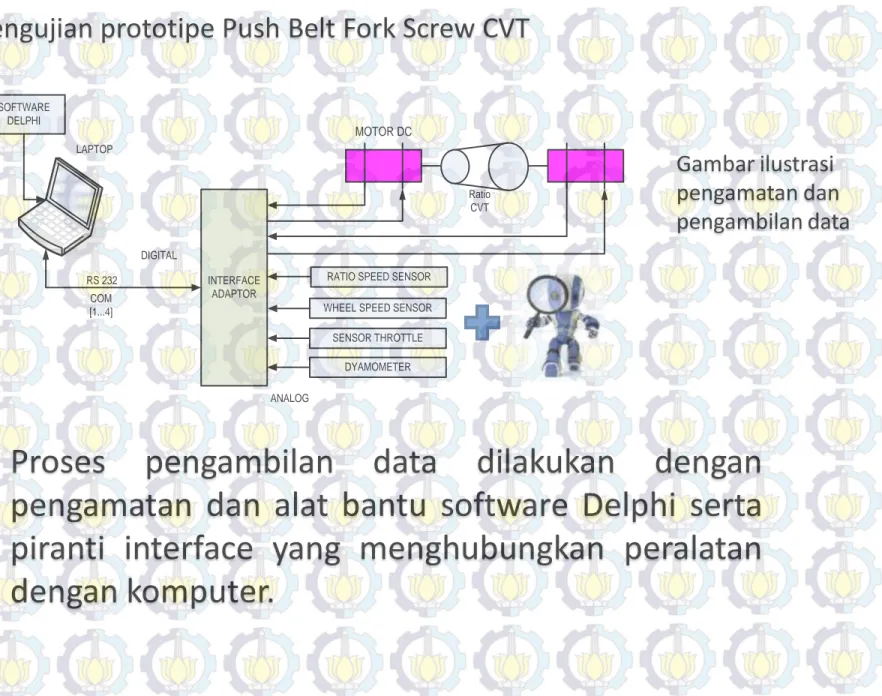
Pengujian prototipe Push Belt Fork Screw CVT
SOFTWARE DELPHI
INTERFACE ADAPTOR DIGITAL
COM [1...4]
RS 232
WHEEL SPEED SENSOR SENSOR THROTTLE LAPTOP
MOTOR DC
ANALOG
Ratio CVT
RATIO SPEED SENSOR
DYAMOMETER
Gambar ilustrasi pengamatan dan pengambilan data
Proses pengambilan data dilakukan dengan
pengamatan dan alat bantu software Delphi serta
piranti interface yang menghubungkan peralatan
dengan komputer.
Prototipe kendaraan dengan Sensor Gaya
Langkah-langkah Percobaan
1) Start Engine stand 2) Kalibrasi sensor gaya
3) Ubah ratio untuk pengambilan data 1
4) Amati dan catat V SG sensor gaya baik primer maupun sekunder (normal)
5) Sesuaikan V SG antara primer dgn sekunder
Jika V SG primer lebih kecil maka pergerakan pulley primer ditambahkan ( diperbaiki )
Jika V SG sekunder lebih kecil maka pergerakan pulley sekunder ditambahkan ( diperbaiki )
6) Amati perubahan V SG primer dan sekunder jika nilainya relatif sama maka catat data-data yang dibutuhkan Xp, Xs, dll (diperbaiki)
7) Ulangi langkah percobaan ke-3 dengan ratio yang berbeda.
8) Selesai
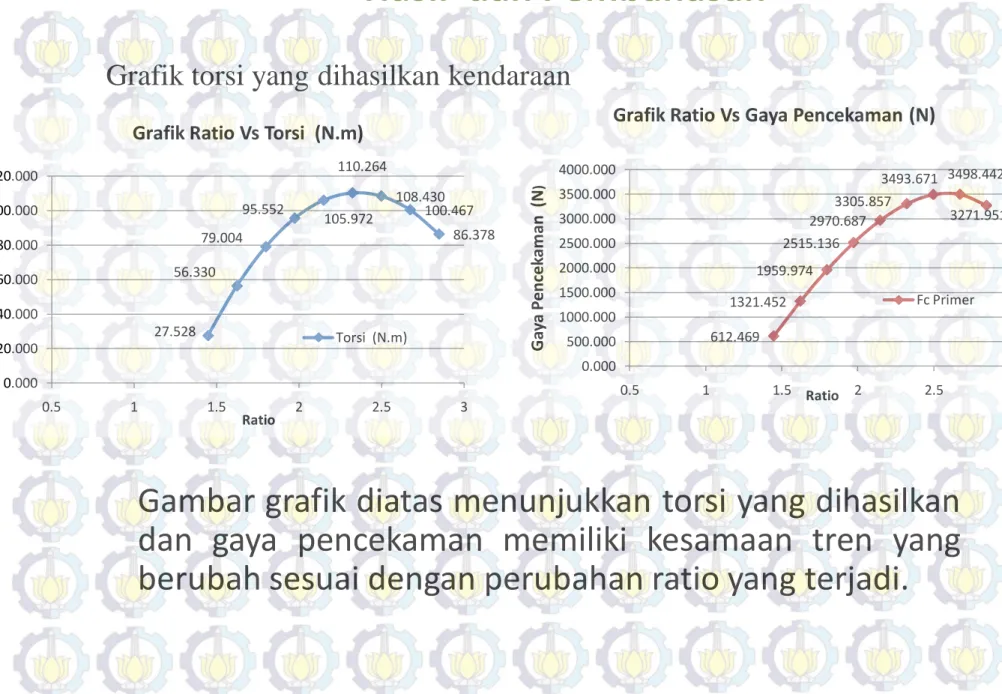
Hasil dan Pembahasan
Gambar grafik diatas menunjukkan torsi yang dihasilkan dan gaya pencekaman memiliki kesamaan tren yang berubah sesuai dengan perubahan ratio yang terjadi.
Grafik torsi yang dihasilkan kendaraan
86.378 100.467 108.430 110.264
105.972 95.552
79.004 56.330
27.528
0.000 20.000 40.000 60.000 80.000 100.000 120.000
0.5 1 1.5 2 2.5 3
Torsi ( N m)
Ratio
Grafik Ratio Vs Torsi (N.m)
Torsi (N.m)
3271.951 3498.442 3493.671
3305.857 2970.687 2515.136 1959.974 1321.452 612.469 0.000
500.000 1000.000 1500.000 2000.000 2500.000 3000.000 3500.000 4000.000
0.5 1 1.5 2 2.5 3
Gaya Pencekaman(N)
Ratio
Grafik Ratio Vs Gaya Pencekaman (N)
Fc Primer
Berdasarkan hasil simulasi Catia akibat pengaruh Clamping Force pada fork screw defleksi terjadi maksimum sebesar 0.2956 mm.
Terdapatnya daerah yang dimungkinkan terjadi kegagalan akibat defleksi yaitu pada 20 mm dari ujung forkscrew. Pada daerah tersebut sensitif terhadap
Simulasi defleksi pada fork screw
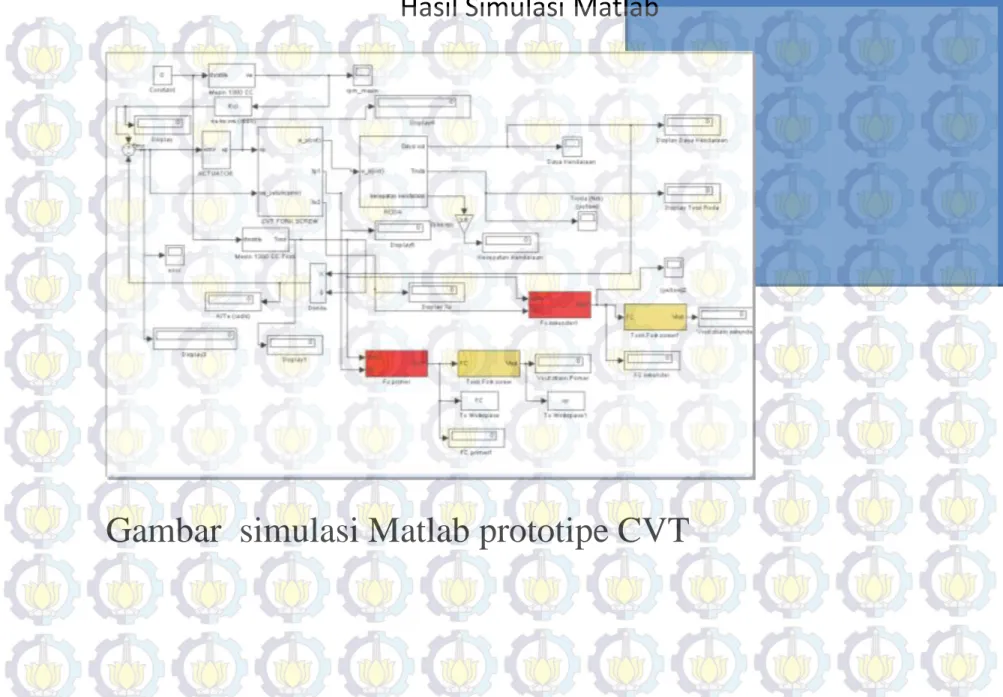
Hasil Simulasi Matlab
Gambar simulasi Matlab prototipe CVT
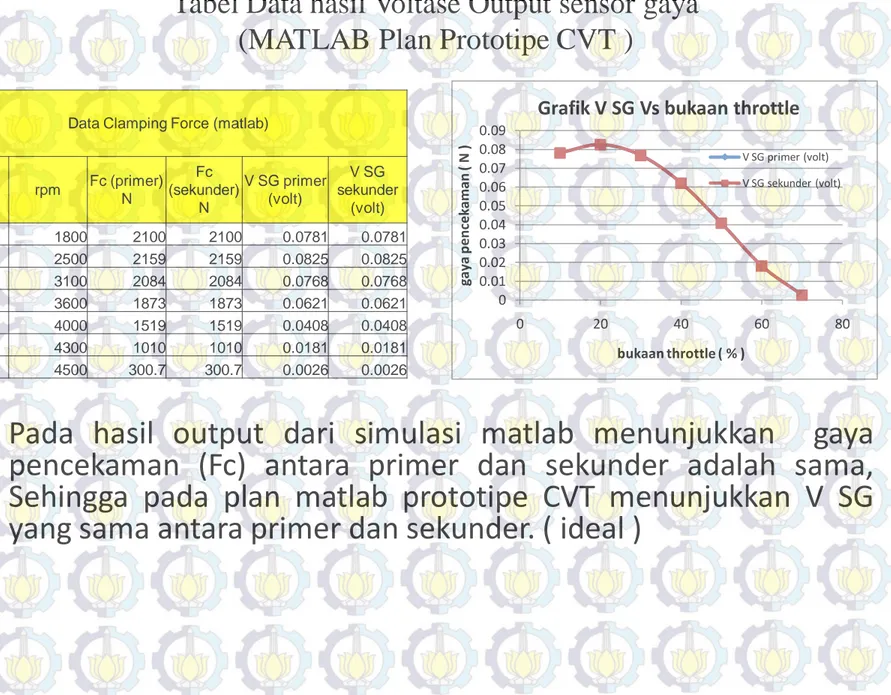
Tabel Data hasil Voltase Output sensor gaya (MATLAB Plan Prototipe CVT )
Pada hasil output dari simulasi matlab menunjukkan gaya pencekaman (Fc) antara primer dan sekunder adalah sama, Sehingga pada plan matlab prototipe CVT menunjukkan V SG yang sama antara primer dan sekunder. ( ideal )
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09
0 20 40 60 80
gaya pencekaman ( N )
bukaan throttle ( % )
Grafik V SG Vs bukaan throttle
V SG primer (volt) V SG sekunder (volt)
Data Clamping Force (matlab)
Ѳ % rpm Fc (primer) N
Fc (sekunder)
N
V SG primer (volt)
V SG sekunder
(volt)
10 1800 2100 2100 0.0781 0.0781
20 2500 2159 2159 0.0825 0.0825
30 3100 2084 2084 0.0768 0.0768
40 3600 1873 1873 0.0621 0.0621
50 4000 1519 1519 0.0408 0.0408
60 4300 1010 1010 0.0181 0.0181
70 4500 300.7 300.7 0.0026 0.0026
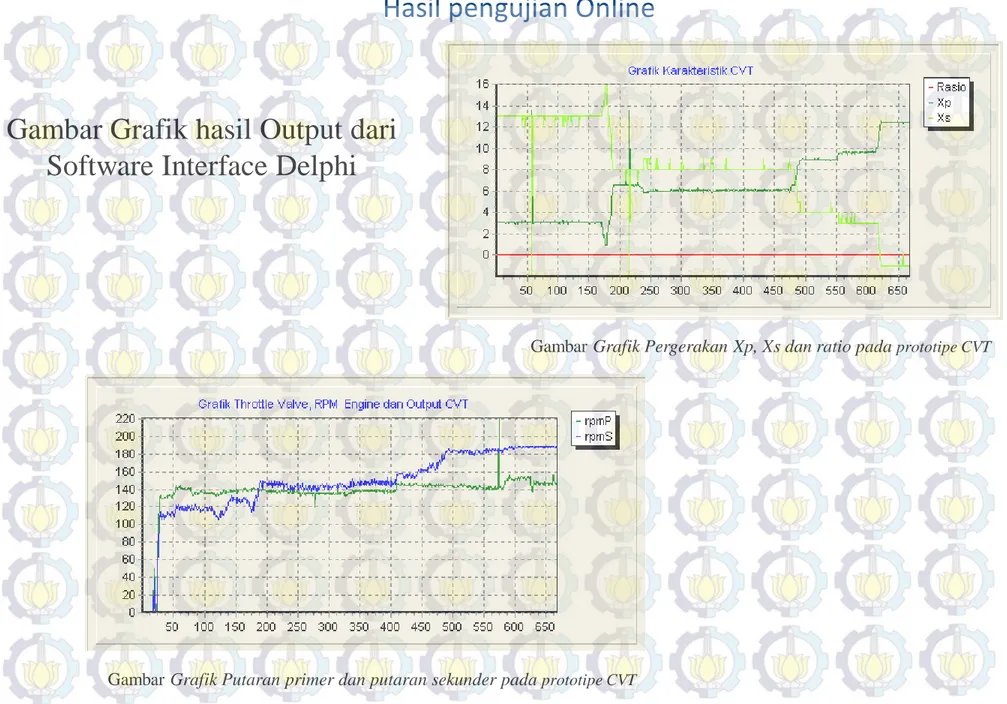
Hasil pengujian Online
Gambar Grafik hasil Output dari Software Interface Delphi
Gambar Grafik Pergerakan Xp, Xs dan ratio pada prototipe CVT
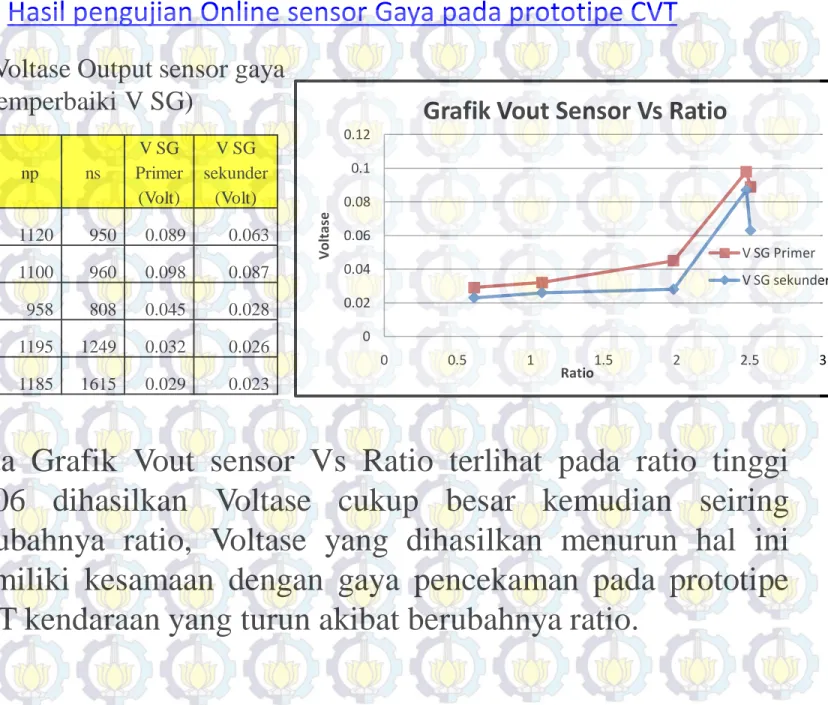
Hasil pengujian Online sensor Gaya pada prototipe CVT
Ratio Xp Xs np ns
V SG Primer (Volt)
V SG sekunder
(Volt)
2.506 1.11 1.6 1120 950 0.089 0.063
2.477 1.33 1.84 1100 960 0.098 0.087
1.98 4.14 5.87 958 808 0.045 0.028
1.08 9.3 13.13 1195 1249 0.032 0.026 0.616 11.9 16.9 1185 1615 0.029 0.023
Tabel Data hasil Voltase Output sensor gaya (tanpa memperbaiki V SG)
0 0.02 0.04 0.06 0.08 0.1 0.12
0 0.5 1 1.5 2 2.5 3
Voltase
Ratio
Grafik Vout Sensor Vs Ratio
V SG Primer V SG sekunder
Pada Grafik Vout sensor Vs Ratio terlihat pada ratio tinggi
2.506 dihasilkan Voltase cukup besar kemudian seiring
berubahnya ratio, Voltase yang dihasilkan menurun hal ini
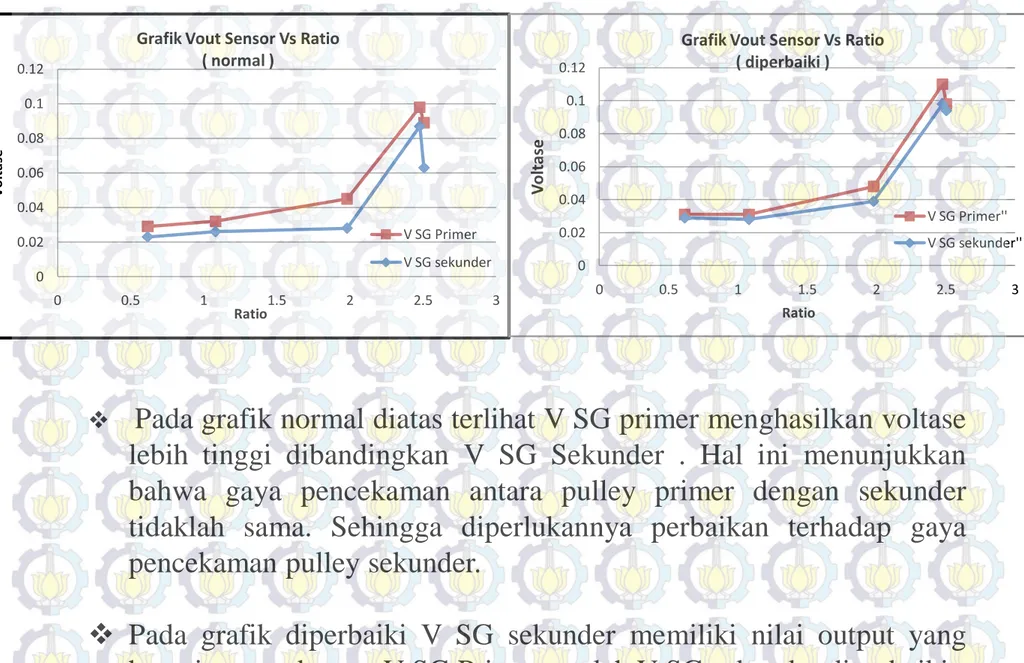
Pada grafik normal diatas terlihat V SG primer menghasilkan voltase lebih tinggi dibandingkan V SG Sekunder . Hal ini menunjukkan bahwa gaya pencekaman antara pulley primer dengan sekunder tidaklah sama. Sehingga diperlukannya perbaikan terhadap gaya pencekaman pulley sekunder.
0 0.02 0.04 0.06 0.08 0.1 0.12
0 0.5 1 1.5 2 2.5 3
Voltase
Ratio
Grafik Vout Sensor Vs Ratio ( normal )
V SG Primer
V SG sekunder 0
0.02 0.04 0.06 0.08 0.1 0.12
0 0.5 1 1.5 2 2.5 3
Voltase
Ratio
Grafik Vout Sensor Vs Ratio ( diperbaiki )
V SG Primer'' V SG sekunder''
Hasil pengujian
Ratio xp' xs' np ns
V SG Primer (Volt)
V SG sekunder
(Volt)
V SG Primer
(Volt)
V SG sekunder
(Volt)
baru normal Diperbaiki
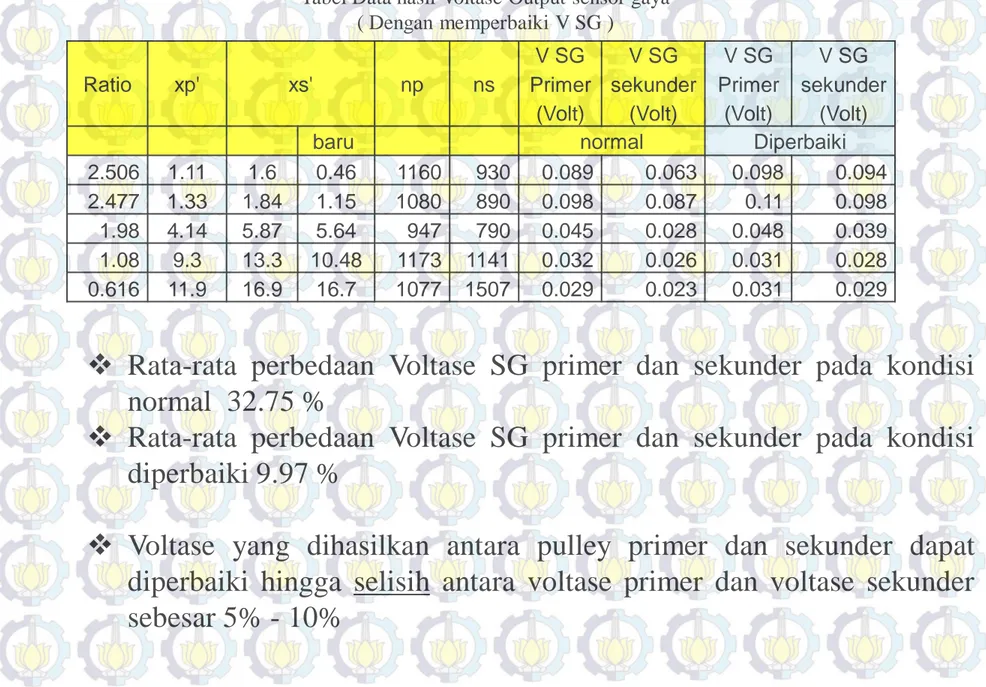
2.506 1.11 1.6 0.46 1160 930 0.089 0.063 0.098 0.094 2.477 1.33 1.84 1.15 1080 890 0.098 0.087 0.11 0.098 1.98 4.14 5.87 5.64 947 790 0.045 0.028 0.048 0.039 1.08 9.3 13.3 10.48 1173 1141 0.032 0.026 0.031 0.028 0.616 11.9 16.9 16.7 1077 1507 0.029 0.023 0.031 0.029
Tabel Data hasil Voltase Output sensor gaya ( Dengan memperbaiki V SG )
Rata-rata perbedaan Voltase SG primer dan sekunder pada kondisi normal 32.75 %
Rata-rata perbedaan Voltase SG primer dan sekunder pada kondisi diperbaiki 9.97 %
Hasil pengujian
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45
0 0.5 1 1.5 2 2.5
Slip
Ratio
Grafik Slip putaran vs ratio
slip
slip diperbaiki
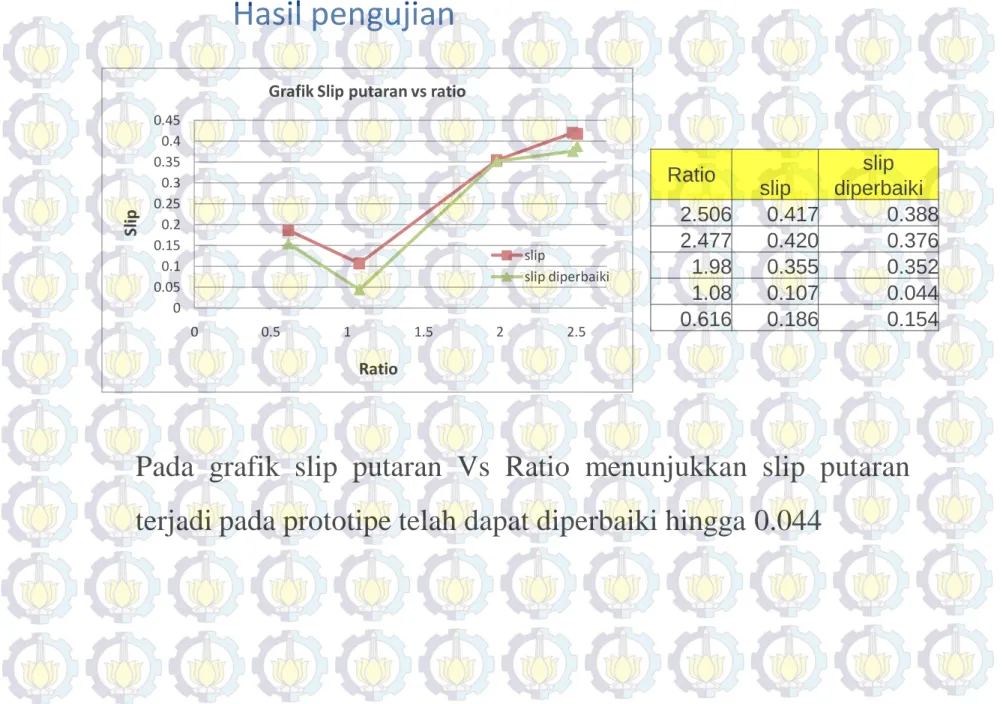
Pada grafik slip putaran Vs Ratio menunjukkan slip putaran terjadi pada prototipe telah dapat diperbaiki hingga 0.044
Ratio
slip
slip diperbaiki 2.506 0.417 0.388 2.477 0.420 0.376 1.98 0.355 0.352 1.08 0.107 0.044 0.616 0.186 0.154
Perhitungan Torsi
Perhitungan Torsi
Pada pengujian simulink MATLAB untuk ratio 1.98 menghasilkan Torsi sebesar 122.7 N m
Pada Pengujian online untuk ratio 1.98 menghasilkan Torsi sebesar 100.1 N m
Kesimpulan
• Strain gauge yang dipasang untuk sensor gaya pada push belt fork screw sistem transmisi CVT telah bekerja dan mewakili nilai Clamping force yang terjadi pada fork screw.
• Selisih Voltase Output pada Sensor gaya push belt fork screw antara pulley primer dan sekunder dapat diperbaiki hingga 5 – 10
% sehingga didapatkan pergerakan Xs yang sesuai dengan Clamping force.
• Kinerja sistem transmisi dapat menjadi lebih baik, yang ditunjukkan pada kondisi tertentu nilai slip putaran yang yang terjadi yaitu 0.15
% dan 0.38 % dan efisiensi Torsi yang terjadi adalah 81.5 %