BAB II
MOTOR INDUKSI TIGA FASA
2.1 Umum
Karena kesederhanaanya ,kontruksi yang kuat dan karakteristik kerjanya yang baik ,motor induksi merupakan motor ac yang paling banyak digunakan .Penamaannya berasal dari kenyataan bahwa arus rotor motor ini bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar (rotating magnetic field) yang dihasilkan arus stator.
Motor ini memiliki konstruksi yang kuat, sederhana, handal, serta berbiaya murah. Di samping itu motor ini juga memiliki effisiensi yang tinggi saat
berbeban penuh dan tidak membutuhkan perawatan yang banyak. Akan tetapi jika, motor induksi masih memiliki kelemahan dalam hal pengaturan kecepatan.
Dimana pada motor induksi pengaturan kecepatan sangat sukar untuk dilakukan.
2.2 Kontruksi Motor Induksi
Motor induksi terdiri dari tiga bagian penusun utama yaitu stator,rotor dan celah udara.Pada inti stator terbuat dari lapisan –lapisan baja beralur yang
didukung dalam rangka stator yang terbuat dari besi tuang atau plat baja yang dipabrikasi.Belitan-belitan nya sma seperti generator sinkron ,diletakkan dalam alur 1200 yang tersambung wye maupun delta.
Pada bagian rotor motor induksi rotor sangkar ,kontruksi inti berlapis dengan konduktor dipasangkan paralel atau kira-kira pararel dengan poros dan mengelilingi permukaan inti.Konduktornya tidak terisolasi dari inti ,karena arus
rotor secara alami akan mengalir melalui tahanan yang paling kecil yaitu konduktor rotor.pada setiap ujung rotor ,konduktor rotor semuanya
dihubungsingkatkan dengan cincin ujung .Konduktor rotor dan cincin ujung serupa dengan sangkar tupi sehingga dinamakan demikian,
Batang rotor dan cincin ujung rotor motor induksi rotor sangkar yang lebih kecil adalah coran tembaga dan alumunium dalam satu lempeng pada inti
rotor.Dalam motor yang lebih besar ,batang rotortidak dicor melainkan dibenamkan ke dalam alur rotor dan kemudian dilas dengan kuat ke cincin ujung.batang rotor tidak selalu ditempatkan paralel terhadap poros motor tetapi kerap kali dimiringkan .Hal ini menghasilkan torsi yang lebih seragam dan juga mengurangi derau dengung magnetik sewaktu motor berjalan.
Motor rotor belitan berbeda dengan sangkar tupai dalam hal kontruksi rotornya.Seperti namanya ,rotor dililit dengan lilitan terisolasi serupa lilitan stator.Lilitan fasa rotor dihubungkan secara wye dan masing-masing fasa ujung terbuka dikeluarkan ke cincin slip yang terpasang pada poros rotor .lilitan rotor tidak dihubungkan ke pencatu .Cincin slip dan sikat semat-mata merupakan penghubung tahanan kendali variabel luar ke dalam rangkain rotor..
2.3 Prinsip Medan Putar
Ketika kita menghubungkan sumber tiga fasa ke terminal tiga fasa motor induksi, maka arus bolak-balik sinusoidal IR, IS, IT akan mengalir pada belitan stator. Arus-arus tersebut akan menimbulkan ggm (gaya gerak magnet) yang mana, pada kumparan, akan menimbulkan fluks magnetik yang berputar sehingga disebut juga dengan medan putar. Medan magnet yang demikian kutub-kutubnya
tidak diam pada posisi tertentu, tetapi meneruskan pergeseran posisinya disekitar stator.
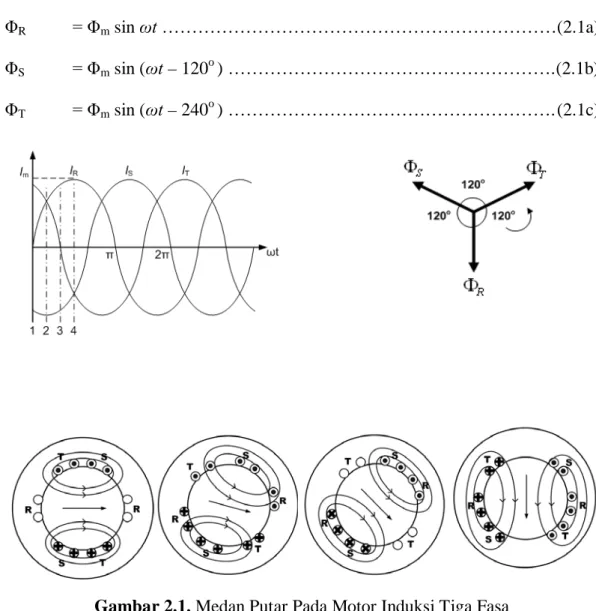
Untuk melihat bagaimana medan putar dibangkitkan, maka dapat diambil contoh pada motor induksi tiga fasa dengan jumlah kutub dua. Fluks yang dihasilkan oleh arus-arus bolak-balik pada belitan stator adalah :
ΦR = Φm sin ωt ………(2.1a)
ΦS = Φm sin (ωt – 120o) ………. (2.1b) ΦT = Φm sin (ωt – 240o) ………. (2.1c)
Gambar 2.1. Medan Putar Pada Motor Induksi Tiga Fasa (Menggambarkan keadaan pada gambar 2.8)
(a). Pada keadaan 1 (gambar 2.6 dan 2.8), ωt = 0 ; arus dalam fasa R bernilai nol sedangkan besarnya arus pada fasa S dan fasa T memiliki nilai yang sama dan arahnya berlawanan. Dalam keadaan seperti ini arus sedang
mengalir ke luar dari konduktor sebelah atas dan memasuki konduktor sebelah bawah. Sementara resultan fluks yang dihasilkan memiliki besar yang konstan yaitu sebesar 1,5 Φm dan dibuktikan sebagai berikut :
ΦR = 0 ; ΦS = Φm sin ( -120o ) = 2
− 3 Φm ;
ΦT = Φm sin ( -240o ) = 2
3 Φm
Oleh karena itu resultan fluks, Φr adalah jumlah fasor dari ΦT dan – ΦS
Sehinngga resultan fluks, Φr = 2 x 2
3 Φm cos 30o= 1,5 Φm
(b). Pada keadaan 2, arus bernilai maksimum negatif pada fasa S, sedangkan pada R dan fasa T bernilai 0,5 maksimum pada fasa R dan fasa T, dan pada saat ini ωt = 30o, oleh karena itu fluks yang diberikan oleh masing-masing fasa :
ΦR = Φm sin ( -120o) = 0,5 Φm
ΦS= Φm sin ( -90o ) = - Φm
ΦT= Φm sin (-210o) = 0,5 Φm
Maka jumlah fasor ΦR dan ΦT adalah = Φr’ = 2 x 0,5 Φmcos 60 = 0,5 Φm.
Sehingga resultan fluks Φr = -ΦS + Φr’ = 0,5 Φm+ Φm= 1,5 Φm.
Dari gambar diagram fasor tersebut dapat dilihat bahwa resultan fluks berpindah sejauh 30o dari posisi pertama.
(c). Pada keadaan ini ωt = 60o, arus pada fasa R dan fasa T memiliki besar yang sama dan arahnya berlawanan ( 0,866 Φm ), oleh karena itu fluks yang diberikan oleh masing – masing fasa :
ΦR = Φm sin ( 60o ) = 2
3Φm
ΦS= Φm sin ( -60o ) = 2
− 3 Φm
ΦT= Φm sin ( -180o ) = 0 Maka magnitud dari fluks resultan : Φr = 2 x
2
3 Φm cos 30o= 1,5 Φm
Dari gambar diagram fasor tersebut dapat dilihat bahwa resultan fluks berpindah sejauh 60o dari posisi pertama.
(d). Pada keadaan ini ωt = 90o, arus pada fasa R maksimum ( positif), dan arus pada fasa S dan fasa T = 0,5 Φm , oleh karena itu fluks yang diberikan oleh masing – masing fasa
ΦR = Φm sin ( 90o) = Φm
ΦS= Φm sin ( -30o ) = - 0,5 Φm
ΦT= Φm sin (-150o) = - 0,5 Φm
Maka jumlah fasor - ΦT dan – ΦSadalah = Φr’ = 2 x 0,5 Φm cos 60 = 0,5 Φm. Sehingga resultan fluks Φr = Φr’ + ΦT= 0,5 Φm+ Φm= 1,5 Φm.
Dari gambar diagram fasor tersebut dapat dilihat bahwa resultan fluks berpindah sejauh 90o dari posisi pertama.
2.4 Prinsip Kerja
Adapun prinsip kerja motor induksi mengikuti langkah-langkah sebagai berikut;
1. Ketika tgangan AC dihubungkan pada kumparan stator ,mka akan timbul medan putar dengan kecepatan:
NS = ...(2.2)
2. Medan putar stator tersebut akan memotong batang konduktor pada rotor.
3. Sehingga pada kumparan rotor akan akan menimbulkan tegangan induksi sebesar:
Er = 4,44f2N2φm...(2.3)
4. Karena rangkaian rotor tertutup maka ggl induksi tersebut akan menghasilkan arus
5. Adanya arus di dalam medan magnet akan menimbulkan gaya pada rotor.
6. Bila torsi mula yang dihasilkan oleh gaya tersebut pada rotor cukup besar untuk memikul kopel beban ,rotor akan berputar searah dengan medan putar stator.
7. Dari pernyataan 2 dan 3 terlihat bahwa syarat terbentuknya tegangan induksi haruslah ada perbedaan kecepatan relatif (slip) antara kecepatan medan putar stator(Ns) dan keceptan putar rotor(Nr) yang dapat dituliskan sebagai berikut;
) 4 . 2 ( ...
...
...
%...
100
s r
s − ×
= n
n s n
8. Bila ns = nr, tegangan tidak akan terinduksi dan arus tidak akan mengalir pada kumparan rotor, karenanya tidak dihasilkan kopel. Kopel ditimbulkan jika nr < ns
2.5 Frekuensi Rotor
Sewaktu rotor belum berputar, maka frekuensi arus pada rotor akan sama seperti frekuensi masukan ( sumber ). Namun,sewaktu rotor akan berputar, maka frekuensi rotor akan bergantung kepada kecepatan relatif atau bergantung terhadap besarnya slip. Untuk nilai slip tertentu, maka frekuensi rotor sebesar f ' yaitu,
r
s n
n − = P
f '
120 , diketahui bahwa ns= p
f 120
Dengan membagikan frekuensi rotor setelah berputar dengan frekuensi sebelum berputar , maka akan didapatkan nilai sebagai berikut
n s n n f f
s r
s − =
=
'
Sehingga f = ' sf ( Hz )……….(2.5)
Telah diketahui bahwa arus rotor bergantung terhadap frekuensi rotor f = ' sf dan ketika arus ini mengalir pada masing – masing fasa di belitan rotor, akan
memberikan reaksi medan magnet. Biasanya medan magnet pada rotor akan menghasilkan medan magnet yang berputar yang besarnya bergantung atau relatif terhadap putaran rotor sebesarsn . s
Pada keadaan tertentu, arus rotor dan arus stator menghasilkan distribusi medan magnet yang sinusoidal dimana medan magnet ini memiliki magnetudo yang konstan dan kecepatan medan putar n yang konstan. Kedua Hal ini merupakan s medan magnetik yang berputar secara sinkron. kenyataannya tidak seperti ini karena pada stator akan ada arus magnetisasi pada kumparannya
2.6 Rangkaian Ekivalen Lengkap
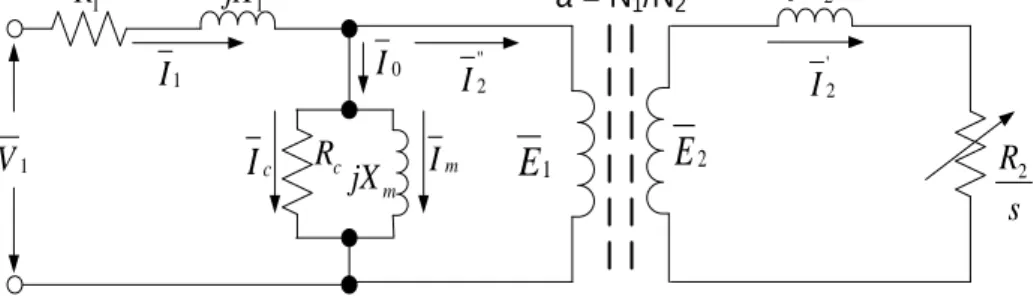
Pada prinsipnya induksi yang terjadi pada motor induksi hampir sama dengan transformator yang berbeban resisitif sehingga penggambaran rangkaian ekivalen motor induksi berdasarkan rangkaian ekivalen transformator diman stator identik dengan sisi primer trasformator dan rotor identik dengan sisi sekunder transformator.perbedaannya yang mendasr antara keduanya adalah transformator merupakan mesin listrik statis sedangkan motor listik merupkan mesin dinamis
V1 Rc E1
I1
Im
+
-
Ic E2
jX2
''
I2 I'2
R1 jX1
jXm
I0
a = N1/N2
s R2
Gambar 2.2. Rangkaian Ekivalen Per-Fasa Motor Induksi Model Transformator
Untuk menghasilkan rangkaian ekivalen per-fasa akhir dari motor induksi, penting untuk menyatakan bagian rotor dari model rangkaian ekivalen gambar 2.2 di atas terhadap sisi stator. Pada transformator yang umum, tegangan, arus, dan impedansi pada sisi sekunder dapat dinyatakan terhadap sisi stator dengan menggunakan rasio perbandingan belitan dari transformator tersebut. Dengan mengasumsikan jenis rotor yang digunakan adalah jenis rotor belitan dan terhubung bintang ( Y ), yang mana motor dengan rotor jenis ini sangat mirip dengan transformator, maka kita dapat melakukan hal tersebut pada motor induksi tiga fasa juga.
Jika rasio perbandingan efektif dari sebuah motor induksi adalah a (= N1/N2), maka pentransformasian tegangan rotor terhadap sisi stator menjadi:
………. (2.6) untuk arus rotor :
………. (2.7)
dan untuk impedansi rotor :
= = = ……….. (2.8)
=
2 + jX2 s
R
dengan penguraian lebih lanjut :
= a2 R2 ………... (2.9) = a2 X2 ………... (2.10)
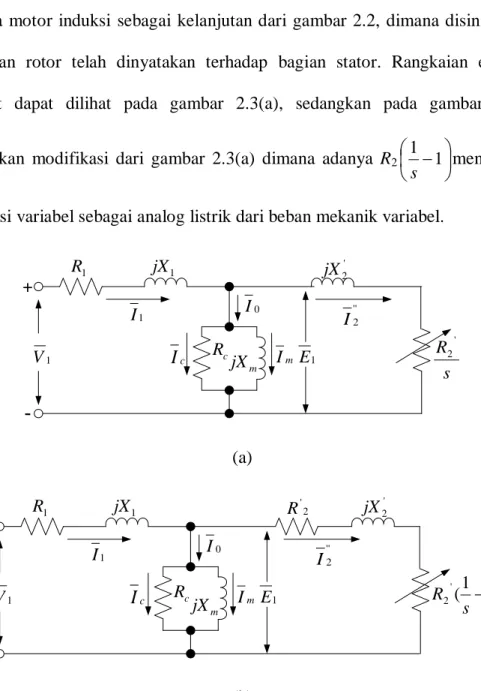
Dari persamaan di atas maka dapat kita gambarkan rangkaian ekivalen per-fasa motor induksi sebagai kelanjutan dari gambar 2.2, dimana disini bagian rangkaian rotor telah dinyatakan terhadap bagian stator. Rangkaian ekivalen tersebut dapat dilihat pada gambar 2.3(a), sedangkan pada gambar 2.3(b) merupakan modifikasi dari gambar 2.3(a) dimana adanya R2
−11
s menyatakan resistansi variabel sebagai analog listrik dari beban mekanik variabel.
Rc
Im
Ic
I0
I1
V1 E1
s R2'
R1 jX1 '
jX2
jXm
''
I2
+
-
(a)
Rc Im Ic
I0
I1
) 1 1
'(
2 −
R s
'2
R
V1 E1
R1
''
I2
'
jX2
jX1
jXm
+
-
(b)
Gambar 2.3. Rangkaian Ekivalen per-Fasa Motor Induksi dengan Bagian Rangkaian Rotor Dinyatakan Terhadap Sisi Stator
(a) dengan tahanan variabel s R2'
(b) dengan tahanan variabel 1 1)
'(
2 −
R s sebagai bentuk analog listrik dari beban mekanik
Pada transformator, analisis rangkaian ekivalen dilakukan dengan mengabaikan cabang pararel yang terdiri dari Rc dan Xm, atau dengan memindahkan cabang pararel ke terminal primer. Bagaimanapun, penyederhanaan ini tidak diperbolehkan pada rangkaian ekivalen motor induksi. Ini disebabkan kenyataan bahwa arus penguatan pada transformator bervariasi dari 2% sampai 6% dari arus beban penuh dan per unit reaktansi bocor primer kecil. Tetapi pada masalah motor induksi, arus penguatan bervariasi dari 30% sampai 50% dari arus beban penuh dan per unit reaktansi bocor stator adalah lebih tinggi. Dengan demikian kesalahan yang besar akan terjadi dalam penentuan daya dan torsi, dalam hal cabang pararel diabaikan, atau dihubungkan pada terminal stator.
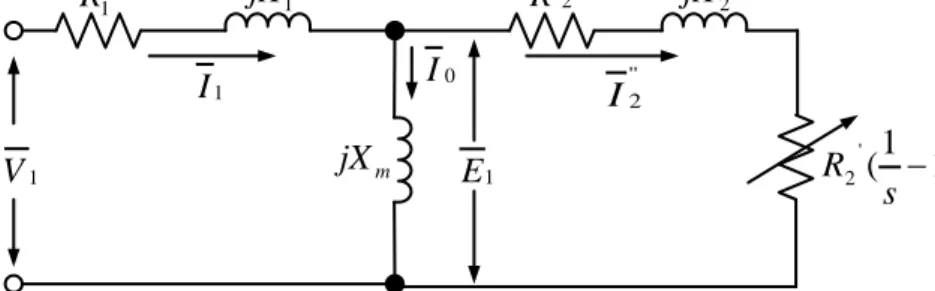
Dibawah kondisi kerja normal pada tegangan dan frekuensi konstan, rugi inti pada motor induksi biasanya juga konstan. Dalam pandangan pada kenyataan ini, tahanan rugi inti Rc yang mewakili rugi inti motor, dapat dihilangkan dari rangkaian ekivalen motor induksi pada gambar 2.3(b). Akan tetapi, untuk menentukan daya poros atau torsi poros, rugi inti yang konstan harus diikut- sertakan dalam pertimbangan, bersama dengan gesekan, rugi-rugi beban buta (stray-load losses) dan angin. Dengan penyederhanaan ini, maka dapat digambar rangkaian ekivalen baru (gambar 2.16.) dengan akurasi rugi yang dapat diabaikan.
I0
I1
) 1 1
'(
2 −
R s
2
R'
V1 E1
R1 jX1 jX2'
jXm
''
I2
+
-
Gambar 2.4. Rangkaian Ekivalen per-Fasa Motor Induksi dengan Mengabaikan Rugi Inti