Konu : ASENKRON MOTORLARDA V / F
ORANI TUTULARAK HIZ AYARI
YAPILMASI
İÇİNDEKİLER
SAYFA 1 ASENKRON MOTORLAR GENEL BİLGİ SAYFA 2 ASENKRON MOTORLARIN ÇALIŞMA PRENSİBİ
SAYFA 5 ASENKRON MOTORLARDA V/ F ORANI SABİT TUTARAK HIZ AYARI YAPILMASI SAYFA 6 STATORA UYGULANAN GERİLİM FREKASININ DEĞİŞTİRİLMESİ
SAYFA 13 DİNAMİK FREKANS DEĞİŞTİRİCİLER SAYFA 13 1 – SENKRON FREKANS DEĞİŞTİRİCİ KULLANMAK
KULLANMAK
SAYFA 18 ASENKRON FREKANS DEĞİŞTİRİCİNİN ASENKRON MOTORLA TAHRİKİ
SAYFA 22 3 - SERBEST UYARTIMLI FREKANS DEĞİŞTİRİCİ SAYFA 23 4 - YARI İLETKEN ( TRİSTÖR VEYA IZGARA AYARLI GAZLI REDRESÖRLERİ ) KULLANMAK
ASENKRON MOTORLAR GENEL BİLGİ
GİRİŞ
Elektrik enerjisinin kural olarak üç fazlı A.C. şeklinde üretim , tasıma ve dağıtımı A.C. motorların elektrikle tahrikinde geniş ölçüde kullanılmalarının başlıca nedeni olmuştur.
Elektrikle tahrik sisteminde kullanılan şönt ve seri karakterislikli pek çok çeşit A.C. motoru vardır. Özellikle yapısı basit ve ucuz , pratik olduğu için son derece kullanışlı olduğundan dolayı irili ufaklı bir çok tahrikte üç fazlı asenkron motorlar kullanılır. Üç fazlı asenkron motor üç fazlı dağıtım sisteminde dengeli endüktif bir yük teşkil eder. Asenkron motorun farklı iki yapısı vardır.
1 - ) Kısa devre rotorlu ( Sincap Kafesli ) asenkron motorlar 2 - ) Rotoru sargılı ( Bilezikli ) asenkron motorlar
Bu iki tip asenkron motorun statorlarını tamamen aynı , yalnız rotorların yapı tarzları farklıdır. Normal olarak statorlarında yıldız veya üçgen olarak bağlanabilen üç fazlı bir sargı mevcuttur. Kısa devre rotorlu asenkron motorun rotorunda kısa devre halinde sincap kafesli ;
bilezikli tip asenkron motorun rotorunda ise kural olarak yıldız bağlı üç fazlı diğer bir sargı bulunur.
Her iki tip asenkron motorda üç fazlı stator sargısının uçları ( üç giriş ile üç çıkış ) bir bağlantı kutusuna bundan ayrı olarak sadece rotoru sargılı üç fazlı asenkron motorun yıldız bağlı olan rotor sargısının sadece üç giriş ucu bilezik ve fırça takımı üzerinden diğer bir bağlantı kutusuna taşınmıştır.
Çünkü asenkron motorlarda Us = k * F1 * ø bağıntısından anlaşılacağı gibi manyetik alanın değişmesi için U / f oranın sabit olması gerekmektedir.
Demek ki primer şebeke frekansı ile birlikte şebeke gerilimi de aynı oran dahilinde değiştirildiğinde motorun manyetik alanı ve netice olarak devrilme momenti ve yüklenilebilirlik kabiliyeti sabit kalır. Aslında düşük frekanslarda statordaki gerilim düşümünün artmasından dolayı devrilme momentinde bir miktar düşme görülür.
Endüstride birçok makinesi , değişik birkaç dönme sayısı yada çoğu zaman sürekli hız ayarı yapılabilen motora ihtiyaç gösterir. Tahrik motorlarına olan bu talep tahrik makinelerine olan ihtiyacı artırmıştır. Elektrik enerjisinin üretilmesi ile birlikte elektrik makineleri önem kazanmıştır. Elektriğin kolayca taşınması , istenildiği zaman kullanılması , elektrik makinelerin verimini diğer makinelere göre yüksek olusu , elektrikle çalışan makinelerin daha fazla kullanılmasını şağlamıştır.
Günümüzde endüstride en çok kullanılan hareketli elektrik makinesi asenkron motorlardır. Çalışma ilkesi bakımından bu makinelere endüksiyon makinesi de denilebilir. Ucuz olması , fırça ve kollektörün bulunmaması nedeni ile az arıza yaparak çalışmaları daha sık uygulamalarda kullanılmalarına sebep olmuştur. Alternatif akım makinelerinden olan asenkron motorların üretimleri doğru akım makinelerine göre daha ucuz ama kontrol edilmeleri daha zor ve pahalıdır. Bir asenkron makinenin devir sayısı kontrolü için ( mil momenti sabit kalmak ) şartı ile diğer asenkron makineye yada güç elektroniği elemanlarına ihtiyaç vardır. Gelişmiş birçok ayar sistemi arasında son
yıllarda endüstride yaygın olarak kullanılan kontrollü diyotlar ( tristörler ) asenkron motor hız ayarı alanında hiç kuşkusuz yeni bir çığır açmıştır.
ASENKRON MOTORLARIN ÇALIŞMA PRENSİBİ
Asenkron motorlar stator ve rotordan ibaret olup stator ve rotor üzerine açılan oluklara yerleştirilen sargılardan oluşur. Stator üzerine yerleştirilen sargılar ya üçgen şeklindeki sargılardan yada yıldız bağlı sargılardan oluşmaktadır.
Stator sargılarından geçen akım alternatif akım olduğundan manyetik devrede periyodik olarak değişen bir alan meydana getirir. Bu alana alternatif alan denir. Bu alternatif alanı fourier serisi ile yazmak mümkündür. Alternatif alanın her bir harmoniğini iki döner alana ayırabiliriz. Bu döner alanlardan birisi saat ibresi yönünde dönüyorsa diğeri saat ibresi tersi yönünde döner ve her ikisinin de dönüş açısal hızı aynıdır. Üç fazlı asenkron motorlarda birbirinden 120 derecelik farklı olan akımlar stator sargılarından geçerek üç adet alternatif alan meydana getirecektir. Üç alternatif alanın sadece birinci harmoniğini dikkate alırsak altı adet döner alan meydana gelir. Bu altı adet döner alandan üçü saat ibresi yönünde , üçü de saat ibresinin tersi yönündedir. Bunların açısal hızları aynı olup Ws tir. Sağa doğru dönen döner üç alan çakışık olarak döndüğü taktirde sola döner alanlar arasında 120 derecelik faz farkı olduğu için bileşke değeri sıfır olur, ve motor sağa doğru dönen çakışık üç döner alanın oluşturduğu moment ile sağa doğru döner . bu açıklamadan anlaşılabileceği gibi stator sargılarından geçen akımlar Ws açısal hızı ile döner stator alanı oluşturur. Motora ilk gerilim uygulandığı anda motor duracaktır.
n
s hızıyla dönen stator döner alanı durmakta olan rotor iletkenini aynı hızda keser ve rotor alternatif gerilimin oluşmasını sağlar. Bu gerilim frekansıf
1 olup bu değer şebeke frekansına eşittir.Motor senkron devir sayısında dönseydi bu taktirde senkron devirde dönen stator alanı rotor iletkenlerini kesmeyecekti. Son uçta rotor sargılarında alternatif gerilim meydana gelmeyecektir. Akım geçmeyince döndürme momenti de sıfır olacaktır. Bu nedenle rotor devir sayısı
senkron devir sayısını altında olacaktır. Bu açıklamadan anlaşılacağı gibi asenkron motorun motor halinde çalışması halinde rotorun senkron devirde dönmesi mümkün değildir. Rotor senkron devirde daha küçük olan ve yük ile değişen devirde döner.
Elektrik ile tahrikte geniş bir uygulama alanına sahip olan asenkron motor esas itibariyle şönt karekterislikli sabit devir sayılı bir tahrik makinesidir. Genellikle motor olarak kullanılmakla birlikte bazı koşulların sağlanması ile birlikte generatör olarak çalışabilirler.
Asenkron motorlar eş zamanlı olmayan makinelerden , yani stator sargılarının oluşturduğu döner alan hızı ile rotorun dönme hızı birbirinden farklıdır. Rotor dönme hızı motor çalışmada asenkron hızdan küçük , generatör çalışmada ise senkron hızdan büyüktür. İşletme özellikleri bakımından doğru akım şönt motoru ile boy ölçüşebilecek şekilde değilse bile sürekli devir sayısı ayar imkanına sahiptir.
Bir, iki, üç ve çok fazlı olarak imal edilebilirler. En fazla kullanılan motorların birisi yukarıda da belirtildiği gibi kısa devre rotorlu veya sincap kafesli asenkron motor ve de rotoru sargılı veya bilezikli asenkron motorlardır. Bilezikli asenkron makinelerin rotor oluklarına genellikle üç fazlı sargılar yerleştirilir. Üç fazlı rotor sargısı yıldız olarak bağlanır ve yıldız noktası dışarı çıkartılmaz . Mil üzerine bağlı ve milden yalıtılmış üç bilezik rotor ile birlikte döner. Bilezikler üzerinde sabit duran fırçalar yardımı ile dış kaynaktan gerilimi ve frekansı değiştirilebilen gerilim uygulanabildiği gibi sargılara dışarıdan empedansa bağlanabilir. Rotor bileziklerine yol alam direnci bağlayarak yol alam akımı sınırlayarak yol alam direnci büyütülebilir. Ayrıca rotora frekans ve güç faktörü kontrolü yapılabilir. Rotoru sargılı asenkron makinelere uygulanan bu kontrol sistemi sincap kafesli motora uygulanan hız kontrolün den daha ucuzdur. Bununla rotor sargıları rotorda oldukça yer kapladığı için sincap kafesli motorlara göre bilezikli asenkron motorlardan daha az güç elde edilir.
Sincap kafesli asenkron motorların statorlarında döner alan oluşturan sargılar vardır. Rotor kısa devre çubuklarının oluşturduğu hacim sincap kafesinkine benzediği için motora bu isim verilmiştir. Normal çalışma şartlarında rotor çubuklarında endüklenen gerilim 10 V altındadır.
Bu yüzden kısa devre çubukları rotor saç paketinden yalıtılmaz . Rotorda yalıtkan malzeme için yer kaplanmadığı için bu motorda birim hacime düşen güç bilezikli asenkron motorlardan daha fazladır.
Bilezikli asenkron motorlarda rotorun sargılı olması ile bileziklerin getirdiği avantaj devir sayısının kolaylıkla ayarlanmasını kalkış momentinin değiştirilebilmesi üstünlüğünü sağlar . Sincap kafesli makinede ise rotor sayısı yerine kısa devre edilmiş iletken çubukların bulunuşu makinenin hem kalkış momentini , hem de devir sayısı ayarı yapabilme yeteneklerini kısıtlamaktadır. Bu nedenle sincap kafesli makineler daha çok kalkış momenti değişmeyen ve devir sayısı mümkün olduğu kadar sabit olan iş makinelerinin tahrikinde kullanılır. Ancak yapım kolaylığından dolayı bilezikli makineye göre iki kat daha ucuzdur.
ASENKRON MOTORLARDA V/ F ORANINI SABİT TUTARAK HIZ
AYARININ YAPILMASI
GİRİŞ:
Asenkron motorlarda normal çalışma bölgesinde dönme sayısı sabit kalmaktadır. Endüstride birçok iş makinası , değişik birkaç dönme sayısı ya da çoğu zaman sürekli hız ayarı yapılabilen motorlara ihtiyaç gösterir. Ayrıca hava kirlenmesi nedeni ile elektrik motorlu taşıt araçlarında, yakıt bataryası almak ve elektrik motorunun kullanılması öngörülmektedir. Asenkron motorun ucuz olması fırça ve kollektorunun bulunmaması nedeni ile az arıza yaparak çalışma olanağının bulunması, bu motorların yaygın olarak kullanılmasına ve hız ayarının gene asenkron motorlar yardımı ile yapılmasına yol açmıştır. Geliştirilmiş birçok ayar yöntemi arasında son yıllarda endüstride yaygın olarak kullanılan kontrollu diyotlar ( Tristör ) asenkron motorların hız ayarı alanında , hiç kuşkusuz yeni bir uygulama alanı açmıştır.
Elektrikle tahrikte önemli bir uygulama alanına sahip bulunan üç fazlı asenkron motor esas itibariyle şönt karakteristikli sabit devir sayılı bir tahrik
makinasıdır. İşletme özellikleri bakımından her ne kadar doğru akım şönt motoru ile bot ölçüşecek boyutta değilse de kademeli ve sürekli devir sayısı ayar imkanlarına sahiptir. Bu nedenle devir sayısı ayarı istenen bazı tahrik sistemlerinde de kullanılmaktadır .
ASENKRON MOTORLARDA HIZ AYAR İLKELERİ
Asenkron motorlarda hız ayar ilkeleri aşağıdaki gibi sıralanabilir. 1-) Statora uygulanan gerilim frekansının değiştirilmesi
2-) Statora uygulanan gerilim değerinin değiştirilmesi 3-) Stator sargısı kutup sayısının değiştirilmesi
4-) Rotora bağlanan direncin değiştirilmesi
5-) Rotor sargılarına dış kaynaktan uygun gerilim uygulanması
STATORA UYGULANAN GERİLİM FREKANSININ DEĞİŞTİRİLMESİ
Bir asenkron motorun senkron hızı yada teorik boşta çalışma hızı stator sargılarına uygulana gerilimin frekansı fσ ve kutup sayısı 2p olduğuna göre aşağıdaki bağlantı ile verilir.
nσ = 60*fσ p
o halde asenkron motorun senkron hızı belli bir p kutup sayısında stator gerilimin fσ frekansı ile değiştirilip kontrol edilebilir. Frekansı değiştirerek yapılan hız kontrolun da asenkron motorun momentinin maksimum değerinin sabit kalması sağlanır. Bu amaç için Vσ /fσ oranı yaklaşık olarak sabit tutulur, gerçekten statora uygulanan gerilim Vσ ; yaklaşık olarak statorda endüklenen Eσ gerilimine eşit kabul edilebilir. Vσ ~ Eσ Statorda endüklenen gerilim ise :
Eσ = K*fσ *Ø ( K sabit ) dır. Moment ise :
M = λ* Ø *sin Ø *I ve maksimum moment için : I = Eσ
I = Eσ
K*fσ *(Lσ Ø+LrØ) M = λ ( Eσ )² sin Ø K fσ
olarak verilir. Buradan momentin maksimum değerinin yaklaşık olarak sabit kalması için Eσ / fσ nin yada (Øσ ) in sabit kalması gerekir. O halde statora uygulanan gerilim frekansını değiştirerek hız ayarı yapılırken , gerilim kaynağının Vσ / fσ oranı sabit tutulur ve öylelikle momentin maksimum değeri sabit tutulmuş olur. Bu amaç için statora uygulan gerilim kaynağı özel bir gerilim kaynağı olmalıdır.
Bu özellikte olan gerilim kaynakları su yollarla elde edilir.
a) Hızı değiştirilebilen bir senkron generatörün uyarma akımı sabit tutulursa Vσ / fσ oranı sabit tutulmuş ve aynı zamanda Vσ geriliminin frekansı da ayarlanmış olur.
b) Son zamanlarda geliştirilmiş olan tristörlü özel inverterler kullanılarak hem Vσ geriliminin frekansı değiştirilir ve hem de Vσ / fσ de sabit tutulur. c) Rotoru sargılı asenkron motorun rotor gerilimi de frekansı değiştirilebilen bir
gerilimdir ve hız kontrol unda kullanılabilir.
Asenkron motorun bu yöntemle yapılan hız kontrolü ve momentin maksimum değerinin sabit tutulması , doğru akım serbest uyarmalı motorunun Ward – Leonard düzeni ile hız ayarına benzemektedir. Şekil 1 de stator frekansının değiştirilmesi ile yapılan hız kontrol una ilişkin M=f(n) karakteristiği gösterilmiştir.
Şekil 1 Asenkron motorun stator gerilimi frekansının değiştirilmesi ve Vσ /fσ in sabit tutulması halinde moment -dönme sayısı karakteristikleri
Hızı değiştirilebilen bir senkron generatör yardımı ile asenkron motorun Vσ / fσ oranı sabit olması koşulu altında hız kontrolu pratikte büyük bir uygulama alanı bulmaz. Çünkü her asenkron motor için hızı ayarlanabilen bir asenkron generatöre ihtiyaç vardır. Asenkron motorun bu yolla hız kontrolu yapılırken , öte yandan hızı kontrol edilen bir tahrik makinesi sağlanmak zorunluluğu doğmaktadır. Bununla beraber buhar türbini ile çalışan bazı gemilerde pervaneleri tahrik eden sincap kafesli asenkron motorlar , hızı ayarlanabilen buhar türbinin tahrik ettiği senkron generatöre bağlanabilir. Böylece asenkron motorun hız ayarı yapılabilir.
Sincap kafesli asenkron motorlar ucuz ve az arıza yaptıklarından çoğu zaman değişken frekanslı kaynaklar pahalı olsa da frekans değiştirerek yapılan hız kontrolu uygulama alanı bulabilmektedir.
Ayrıca rüzgar tünellerinde uçak modellerini kontrol etmek için yüksek hızlı sincap kafesli asenkron motorlar kullanılır. Bunun için statora 50 Hz ‘e göre yüksek frekanslı gerilim uygulanır.
Statora uygulanan gerilim frekansını değiştirilmesinde asenkron motorun senkron hızı belirli bir p kutup sayısında stator gerilimin fσ frekansı ile değiştirilip kontrol edilebilir. Normal yükleme sınırları içinde kalmak koşulu ile kontrol edilen devir sayısı yük momentinden bağımsızdır.
Şekil 2 Asenkron motorda gerilim frekansı parametre olmak üzere momentin
devir sayısı ile değişmesi
Asenkron motorlarda frekansı değiştirerek yapılan hız kontrolunda , asenkron motorun devrilme momentinin değerinin sabit kalması sağlanır. Bu amaç için Vσ / fσ oranı sabit tutulur.
Buradan M(max)=( Vσ )² olduğu hatırlanır. fσ
Vσ / fσ ile devrilme momenti arasındaki bu bağlantıdan dolayı frekans büyüdükçe uygulan gerilimin etkin değeri değişmezse devrilme momenti küçülür. Yani hava aralığındaki akı yoğunluğu azalır. Aynı şekilde düşük hızlara indikçe de devrilme momenti yükselir. Bu ise stator artması gibi bir sakınca yaratır. Oysa devrilme momentinin sabit tutulması yani frekans değerine
f
2 =u
2f
1u
1olacak şekilde bir u stator gerilimi karşı düşürüp moment hız karakteristiklerini hız düştükçe sola doğru paralel olarak kaydırmak motorun hızını senkron hızla sıfır değeri arasında değiştirmek mümkün olur.
Buradan görüldüğü gibi asenkron makineye uygulanan gerilim ve ya akımın frekansını değiştirerek yapılan hız kontrolu hem geniş bir kontrol aralığı sağlaması hem de hız kontrol bölgesinde devrilme momentinin sabit tutulmasına olanak verdiğinden en uygun yöntemdir.
Pratikte bu hız kontrol yönteminin sağladığı güç elektroniği devreleri, besleme biçimlerine göre iki gruba ayrılırlar.
a) Doğrudan şebekeden çevirici b) Dolaylı olarak şebekeden çevirici
a)Doğrudan şebekeden çevirici adından anlaşılacağı gibi birinci gruba dahil olup bir frekanstaki giriş gerilimini başka bir frekanstaki değişen gerilime çevrilir. Diğer frekans çeviricilere göre en önemli farkı bu gerilim ve frekans değiştirme işlemi giriş gücünde doğrudan yapılmasıdır.
Çevirme işlemi, tristör elemanlarının uygun tetiklenmesi ile gerçekleşir.
Frekans çeviricinin çalışma ilkesi istenen frekansta çıkış gerilimi oluşturacak şekilde giriş geriliminden yararlanarak tristörlerin uygun anlarda tetiklenmesine dayanır. Bu amaçla çeviricinin her fazına birbirine zıt paralele bağlı iki tane üç fazlı tam dalga kontrollu doğrultucu bağlanır. Bu doğrultuculardan biri çıkış akımın yarı periyodunda , diğeri ise negatif yarı periyodunda doğrultma ve evirme modunda çalışarak istenen frekansta çıkış gerilimi temel bileşen yanında harmonikleride kapsar.
Çıkışta elde edilen frekans şebeke frekansının altındadır. Bu nedenle düşük devir sayılarında çalışmak söz konusudur.
Dolaylı olarak kullanılan çeviricilerde dolaylı olarak düşük frekanslarda çalışma dalga şeklinin kare şeklinde olması asenkron motorlarda olumsuz etki yapar. Bundan dolayı üç faz için toplam 36 tristör kullanıldığından maliyet açısından olumsuz oluşu büyük güçlü motorların düşük hızlarda kullanılması hali için uygundur.
Şekil 3 50 Hz lik sabit frekanslı alternatif gerilim kaynağı kullanarak
değişken frekanslı (0-40 Hz) bir gerilim kaynağı veren cycloconverter dener doğrudan frekans değiştirici ile asenkron motorun ayarı
Beslemesi dolaylı olarak şebekeden sağlanan rekans çeviriciler şekil 4 de görüldüğü gibi dört kısımdan oluşur.
1- Doğrultucu 2- Ara devre 3- Çevirici 4- Kontrol ünitesi Motor
Şekil 4 Frekans çeviricinin çalışma ilkesi
Frekans çeviriciler kullanılan ara devre tipine göre iki ana grupta toplanabilir. Ara devre sadece seri bir endüktanstan oluşuyorsa çevirici akım ara devreli olarak tanımlanır.
Doğrultucu tarafından motor akımının kontrol edildiği bu düzen bir motorlu tahrik sistemleri için elverişlidir. Akım ara devreli çeviriciler alan zayıflama bölgesinde kullanılmaya uygun değildir.
a) Akım ara devreli
b) Kontrollu doğrultucu ile denetlenebilen gerilim ara devreli c) Doğru akım kıyıcı ile denetlenebilen gerilim ara devreli d) D.G.M. lu sabit ara devreli
Doğrultucu
Ara
Devre
Evirici
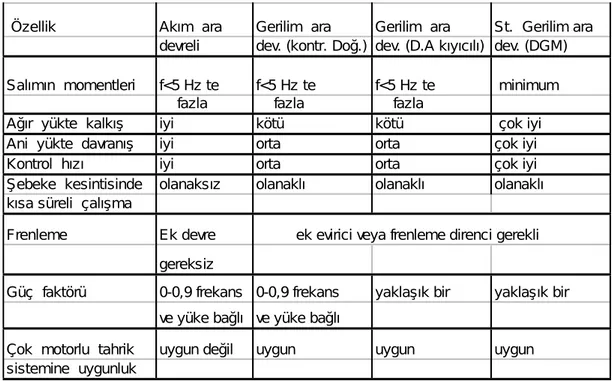
Özellik Akım ara Gerilim ara Gerilim ara St. Gerilim ara devreli dev. (kontr. Doğ.) dev. (D.A kıyıcılı) dev. (DGM) Salımın momentleri f<5 Hz te f<5 Hz te f<5 Hz te minimum
fazla fazla fazla
Ağır yükte kalkış iyi kötü kötü çok iyi
Ani yükte davranış iyi orta orta çok iyi
Kontrol hızı iyi orta orta çok iyi
Şebeke kesintisinde olanaksız olanaklı olanaklı olanaklı kısa süreli çalışma
Frenleme Ek devre ek evirici veya frenleme direnci gerekli gereksiz
Güç faktörü 0-0,9 frekans 0-0,9 frekans yaklaşık bir yaklaşık bir ve yüke bağlı ve yüke bağlı
Çok motorlu tahrik uygun değil uygun uygun uygun sistemine uygunluk
Tablo 1 de çeşitli frekans çeviricilerin karşılaştırılması yapılmıştır.
Asenkron ve senkron motorlarda 50 Hz lik frekansla erişeli bilecek maksimum devir sayısı 3000d/d dır. Halbuki bazı tezgah ve makinelerde ; örneğin marangoz tezgahları ve delme makinelerinde çok daha yüksek devir sayısına ihtiyaç vardır. Buna karşılık bazı tahriklerde de ; örneğin hadde tesisleri , taşıma yolları , seri halinde çalışan bazı tezgahlar , matbaa ve tekstil makinelerde düşük devir sayıları kullanılır.
Asenkron ve senkron motorların primer şebeke frekansını değiştirerek devir sayılarını geniş bir alan içinde iki yönlü sıhhatli bir şekilde ve stabil olarak ayarlamak mümkündür.
Yüksek hızlı tezgahlarda 150/300 Hz , hadde ve gemilerin tahrikinde 15/60 Hz arasında değişen frekanslara ihtiyaç duyulmaktadır. Düşük hızlı tahriklerde de 5 Hz lik frekanslar kullanılır.
Asenkron motorların devir sayısı ayarında çoğu zaman yüklenilebilirlik kabiliyetinin değişmemesi istenir. Bu ise primer şebeke frekansı değiştirirken manyetik lanın sabit tutulması ile gerçekleşir. Bilindiği gibi asenkron motorlarda :
Vσ =c * fσ *Ø bağıntısı geçerlidir. Buna göre manyetik alanın değişmemesi için ;
Vσ
=c * Ø = sabit fσ
oranını sabit kalması gerekir. Buradan primer şebeke frekansı ile birlikte şebeke gerilimi de aynı oran dahilinde değiştirildiği taktirde , motorun manyetik alanı ve netice olarak devrilme momenti ve yüklenilebilirlik kabiliyeti sabit kalır. Aslında düşük frekanslarda stator gerilimi düşümünün artmasından dolayı devrilme momentinde bir miktar düşme görülür.
Şekil 5 Şebeke frekans ve gerilimin aynı oran kabilinde değiştirildiği asenkron
motorlarda n= f(M) karakteristikleri
Şekil 5 de primer şebeke frekans ve şebeke gerilimini birlikte aynı oran dahilinde değiştirildiği bir asenkron motorda elde edilen (n = f(M) ) ayar karakteristiği gösterilmiştir.
Üç fazlı asenkron ve senkron motorların primer şebeke frekansını değiştirerek devir sayısı ayarı dinamik ve statik frekans değiştiricileri gerektirir. Aşağıda bu maksatla en fazla kullanılan frekans değiştirme sistemleri ele alınacaktır.
DİNAMİK FREKANS DEĞİŞTİRİCİLER
Uygulamalarda , üç fazlı asenkron ve senkron motorların devir sayıları ayarı için dinamik frekans değiştirici olarak daha çok senkron ve
asenkron frekans değiştiriciler (motor ve generatör grupları ) ile serbest uyartımlı frekans değiştirici kullanılır.
1-) Senkron Frekans Değiştirici Kullanmak
senkron ve asenkron frekans değiştiriciler daha çok yüksek güçlü tahriklerde ; örneğin gemiler , seri halinde çalışan makineler ve hadde tesislerinde kullanılır. Özellikle düşük frekans doneleri için uygundur.
Gemilerde frekans değiştirici olarak büyük güçlü bir senkron alternatör ile tahrik makinası olarak devir sayısı geniş sınırlar içinde ekonomik olarak değişebilir bir ısı kuvvet makinası ; çoğunlukla bir buhar türbini kullanılır. Türbine gönderilen buhar çoğunlukla kısıldıkça devir sayısı ile birlikte alternatörün frekansı ve bir netice geminin pervanelerini tahrik eden senkron ve asenkron motorların devir sayıları düşer. Türbinin devir sayısını değiştirirken alternatörün ikazı sabit tutulursa frekansla birlikte gerilimi de aynı oran dahilinde değişeceği için esas tahrik motorunun devrilme momenti yaklaşık olarak sabit kalır.
Sanayide seri halinde çalışan makineler ve hadde tesislerinde çok sayıda tahrik motorunun devrini birlikte kontrol etmek için senkron frekans değiştiriciyi tahrik etmek üzere belirli güçlere kadar stator veya rotorundan beslenen üç fazlı kolektörlü şönt motor ( Schrage-Richter motoru ) büyük güçler için kural olarak WARD- LEONARD tahriki kullanılır.
Şekil 6 W-L Ayar sistemi ile ayar edilen büyük güçlü bir senkron frekans
değiştiricinin esas bağlantı şeması
Şekil 6 da frekans değiştiricinin tahrik makinesi olarak WARD-LEONARD sisteminin kullanıldığı büyük güçlü bir senkron değiştiricinin üç fazlı asenkron motorları (esas tahrik motorlarını ) içine alan esas bağlantı şeması gösterilmiştir. Bu bağlantı şemasında FD senkron frekans değiştirici , TM2 bunun tahrik makinesi ,TM1 de D.A. kontrol generatörün tahrik makinesi , İD ikaz dinamosu , M1 , M2 , M3 , devir sayısı ayarlanan üç fazlı asenkron motorlar (esas tahrik motorları ) dır.
Böyle bir tahrik sisteminde FD nin gücü tahrik motorları güçleri toplamına eşittir. Tahrik makinesi olarak bir ısı kuvvet makinesi kullanılması halinde ayar sisteminin toplam gücü esas tahrik motorları toplam gücünün %300 ‘ne , WARD-LEONARD sistemi kullanıldığı taktirde %500 ‘ne ulaşır.
Bu nedenle böyle bir ayar sisteminin verimi düşük, tesis ve işletme giderleri yüksektir. Buna karşılık ayar aralığı oldukça geniş ayrıca ayar sürekli ve stabildir. Alternatörün devir sayısı ve frekansı değiştirilirken ikaz akımı sabit tutulmak suretiyle üç fazlı asenkron ve senkron motorun devri geniş bir alanda değişirken devrilme momenti yaklaşık olarak sabit kalır., yüklenilebilirlik kabiliyeti değişmez.
Şekil 7 Üç fazlı bilezikli tip asenkron makinenin frekans değiştirici olarak
kullanılması
2-) Asenkron Frekans Değiştirici Kullanmak
Üç fazlı asenkron motorların kademeli ve sürekli devir sayısı ayarı için asenkron frekans değiştiriciler de kullanılır. Şekil 7 de asenkron frekans değiştirici olarak kullanılan üç fazlı bilezikli bir asenkron makinenin esas bağlantı şeması gösterilmiştir. Burada FD asenkron frekans değiştirici , TM tahrik makinesi , M devir sayısı ayarlanan motordur. Frekans değiştirici , tahrik makinesi tarafından döner alan yönünde ;
n
tm = 60 *fσ =n
sfd psenkron devir sayısı ile döndürülürse sekonder frekansı
f
2fd=f
1m ; döner alana zıt yönde isen
sfd hızıile tahrik edilirsef
2fd =f
1m = 2f
1 olur. Buradan frekans değiştiricinin devir sayısı +n
sfd ile -n
sfd arasında değiştirilerekf
2fd sekonder frekansı 0 ila 2f
1 arasında ayarlanır.Asenkron frekans değiştiricinin sekonder ve primer frekansları arasında ;
f
2fd =n
sf –n
tmf
1n
sfbağıntısı yazılabilir. Frekans değiştiricilerin sekonderinden beslenen esas tahrik motorunun boşta ideal devir sayısı ise ;
n
=f
2fdn
sm =n
sfd -n
tmn
sm olur. f1n
sfdBu denklemlerde
n
sm M esas tahrik motorununf
1 şebeke frekansındaki senkron devir sayısıdır. Asenkron frekans değiştiricilerin sekonder gerilimi frekansla orantılı değiştiği için devir sayısı ayarlanan M tahrik motorunun döner alanı ve devrilme momenti yaklaşık olarak sabit kalır. Asenkron frekans değiştiricileri güç kayıpları hesaba katılmadığı taktirde esas güçler için ;Pm = Pfd + Ptm
bağıntısı yazılabilir. Buradan M tahrik motoruna verilen güç frekans değiştiricinin stator döner alan gücü ile tahrik makinesinin mil gücü toplamına eşittir. Diğer taraftan bilindiği gibi kayıplar hesaba katılmadığı taktirde bir asenkron makinenin stator döner alan gücü ile rotor mekanik gücünün döndürme momentine göre ifadeleri ;
P fd = 2π *
n
sfd Mfd , P tm = 2π *n
tm Mfd60 60
olum güçlerin bu değerleri önceki formüllerde yerine konursa ; Pm = 2π *
n
m Mm = 2π (n
sfd –n
tm ) Mfd60 60
bağıntısı elde edilir. Bu denklemler ile frekans değiştirici ve devir sayısı ayar edilen M tahrik motoru momentleri arasında ;
Mfd =
n
sm Mmn
sfdbağıntısına ulaşılır. Bu denklem , frekans değiştirici döndürme momentinin motor milinde ki yük momenti ile orantılı değiştiğini , ayarlanan sekonder frekansına bağlı olmadığını gösteren önemli bir neticedir.
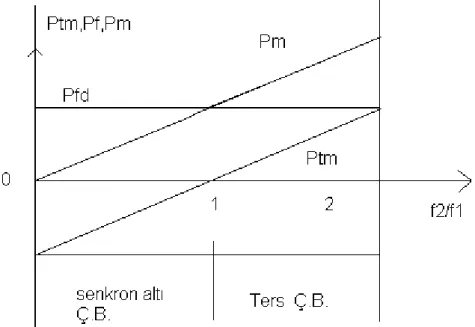
Şekil 8 de yük momentinin sabit değeri için esas güçlerin ( P, Ptm Pm güçlerinin )
f
2fd /f
1 frekanslar oranına bağlı olarak değişimleri gösterilmiştir. Frekanslar oranının 0 ile 2 arasında değişen ayar alanı için ; Pfd = Ptm = Pm/2 olup tesisin toplam gücü tahrik motoru gücünün 2 katıdır. Bu bakımdan asenkron frekans değiştirici kullanmak senkron frekans değiştiriciye göre daha avantajlıdır.Şekil 8 Yük momentinin sabit değeri için asenkron frekans değiştirici
kullanarak devir sayısı ayarında güçlerin değişimi
Tahrik makinesi olarak, sürekli devir sayısı ayarı için belirli güçlere kadar aynı şebekeden beslenen üç fazlı kolektörlü alternatif akım şönt motoru büyük güçlerde WARD-LEONARD tahriki kullanılır. Kademeli devir sayısı ayarı ile yetinildiği taktirde , tahrik makinesi kural olarak çok kutup sayısına haiz üç fazlı k.d. rotorlu bir asenkron motordur.
Şekil 9 da WARD-LEONARD sistemiyle tahrik edilen büyük güçlü bir asenkron frekans değiştiricinin esas bağlantı şeması gösterilmiştir. Bu bağlantının normal bağlantıdan olan farkı , rotorun
f
1 frekanslı şebekeye bağlanışı , statorun ise sekonder olarak kullanılmasıdır.Bu bağlantıda vantlı gücün yanında, gerek Fd gerekse M tahrik motorları döner alanları için lüzumlu reaktif güç FD nin rotorundan statora aktarılır.
Burada sekonder frekansı yine FD nin devri değiştirilerek ayarlanır. Sükunet durumunda
f
2fd =f
1 dir. Sekonder frekansınıf
1 üstünde daha büyük bir değere ayarlamak için frekans değiştirici rotordöner alan yönünde daha küçük frekanslar için rotor döner alanına zıt yönde çevrilir. Böyle bir ayar sistemiyle tahrik motorlarının devir sayıları birlikte sıhhatli ve stabil olrak geniş bir alan içinde ayarlanabilir. Ayar oranı 10:1 hatta 12:1 ‘e kadar çıkar.
Şekil 9 daki montaj şeklinde 0 ile 2
f
1 arasındaki frekans ayar alanı için tesisin toplam gücü devir sayıları ayarlanan esas tahrik motorları toplam gücünün 4 katıdır. Bundan dolayı bu ayar sisteminde kuruluş ve işletme maliyetleri oldukça yüksektir.ŞEKİL 9 WARD –LEONARD ayar sistemiyle tahrik edilen bir asenkron
frekans değiştiricinin esas bağlantı şeması
ASENKRON FREKANS DEĞİŞTİRİCİNİN ASENKRON MOTORLA TAHRİKİ
Kademeli devir sayısının yeterli olduğu tahriklerde kural olarak asenkron frekans değiştirici kutup sayısı değişebilen ( iki , üç , veya dört devirli ) k.d. rotolu bir senkron motorla tahrik edilir. Burada asenkron tahrik makinesi için iki farklı besleme şekli mümkündür.:
a) Doğrudan doğruya primer şebekeden besleme b) Frekans değiştiricinin sekonderinden besleme
Şekil 10 da her iki besleme şekline ait esas bağlantı şemaları gösterilmiştir.
Şekil 10 Asenkron frekans değiştiricinin
a) Primer şebekeden
b) Sekonder şebekeden beslenen asenkron motorla tahriki
İlk olarak ilk bağlantı sekli etüt edilirse : Kayıplar hesaba katılmadığı taktirde üç fazlı TM asenkron tahrik makinesi asenkron frekans değiştiriciyi boşta senkron devir sayısı ile tahrik eder. Asenkron frekans değiştirici ve asenkron tahrik makinesinin çift kutup sayıları sıra ile Pfd ve Ptm ile gösterilirse her iki makinenin senkron devir sayıları :
n
sfd = 60f
1 ven
stm = 60f
1 Ptm PtmOlup boşta yaklaşık
n
stm devir sayısı ile çevrilen frekans değiştiricinin dönüş yönüne bağlı olrak sekonder ve primer frekansları arasında :f
2 = ( 1+(-) Pfd )f
1 Ptmbağıntısı elde edilir. Buna göre devir sayısı ayarlanan M tahrik motorunun ( veya tahrik motorlarının ) boşta ideal devir sayısı :
Ptm
olur. Burada
n
m tahrik makinesininf
1 frekanslı şebekeye direkt bağlantısındaki - senkron devir sayısıdır.TM tahrik makinesi asenkron frekans değiştiriciyi döner alan yönünde çeviriyorsa yukarıdaki denklemlerde parantez içindeki işaret döner alana zıt yönde tahrik ediliyorsa + dır.
Asenkron frekans değiştirici tek devreli kd rotorlu bir asenkron motorla tahrik edildiği taktirde üç devir sayısı kademesi , kutup değiştirme sayısı k olan çok devirli bir asenkron motorla tahrik halinde 3k+1 devir sayısı kademesi elde edilir. Örneğin çift kutup sayısı Pfd =1 olan bir asenkron frekans değiştirici çift kutup sayısı Ptm =2 olan tek devirli bir asenkron makine ile tahrik edilirse elde edilen devir sayısı kademeleri
n
m /n
sm = 0,5 - 1 - 1,5 olur. Çift kutup sayıları 2 ve 4 olan çift devirli bir asenkron tahrik makinesi kullanıldığından
m /n
sm = 0,5 – 0,75 – 0,875 –1 – 1,125 – 1,25 – 2 devir sayısı kademesi elde edilir.Şimdi şekil 10’daki ikinci bağlantı ele alınırsa : Bu ikinci bağlantı şeklinde TM tahrik makinesi asenkron frekans değiştiricinin sekonderinden beslenmektedir. Kayıplar hesaba katılmadığı taktirde bu bağlantı şeklinde esas güçler arasında :
Pfd + Ptm = P2fd = Pm + Ptm veya
Pfd = Pm = P2fd - Ptm
Bağıntısı yazılabilir. Diğer taraftan Pfd = 2π
n
sfd Mfd 60 Pm = 2πn
m Mm ve ; 60 P2fd = 2π (n
sfd –n
tm ) Mfd 60 Ptm = 2πn
tm Mfd dir. 60Bu bağıntılardan
n
m , tahrik makinesinin devir sayısı olup , şayet tahrik makinesi frekans değiştiriciyi döner alan yönünde çeviriyorsan
tm pozitif , döner alan ters yönde çeviriyorsa negatiftir.Önceki denklemlerden asenkron frekans değiştiricinin döndürme momentleri için
Mfd =
f
2n
sm Mf
1n
sfdbağıntısı bulunur , ve devir sayısı ayarlanan M tahrik motoru milindeki yük momentinin sabit kalması halinde :
Mfd =
f
2 60 P1mf
1 2πn
sfdbağıntısı yazılabilir. Mfd nin bu değeri önceki denklemlerde yerine konulduğunda :
P2fd = (
f
2 )² * P1m ve Ptm = (1-f
2 )f
2 P1mf
1f
1f
1bağıntıları elde edilir.
Şekil 11 de sabit kalan kren – moment yük karakteristiği halinde şekil 10 b deki ayar bağlantısı için Pm , Pfd , ve Ptm güçlerinin
f
2 /f
1 frekanslar oranına bağlı olarak bu oranın 0 ile 2 sınır değer arasındaki değişmeleri gösterilmiştir.Şekil 11 , Şekil 10 b deki kaskat bağlantı ile sabit moment altında devir
sayısı ayarında Pm , Ptm , P2fd güçlerinin frekanslar oranına bağlı olarak değişimi
3 - Serbest Uyartımlı Frekans Değiştiriciler Kullanmak
Serbest uyartımlı frekans değiştirici esas itibariyle bir tarafında üç bilezik , diğer tarafında komütatör ve üzerinde üç veya altı adet fırça takımı bulunan bir doğru akım endüvisinden meydana gelir. Statorun üzerinde serbest ikaz sargısı bulunur.
Endüvi sargısının uçları normal olarak kollektör dilimlerine ve bu sargının aralarına 120 derece E faz farklı üç noktası da bileziklere bağlıdır. Bu yapıda bir doğru akım endüvisi , frekans transformatörü olarak kullanılabilir. Bilezikler , en genel halde sürekli veya kademeli olarak ayarlanabilen üç fazlı bir transformatör üzerinden
f
1 frekanslı üç fazlı şebekeye bağlıdır.Frekans değiştiricinin sekonderini oluşturan komütatör üzerindeki fırçalarda devir sayısı ayar edilebilecek asenkron motora bağlıdır.
Bu yapıda bir endüvi komütatör ve fırçalar sistemiyle birlikte fırçalardaki gerilim sabit kalmak koşulu ile frekansın geniş sınırlar arasında değişimini mümkün kılar.
Frekans değiştiricinin endüvisi transformatör ve bilezikler üzerinden
f
1 frekanslı ve üç fazlı şebekeden beslenirse endüvi sargısından geçen üç fazlı akımlar rotora nazaran :n
sfd = 60f
1 Pfdhızıyla hareket eden bir döner alan meydana getirir. Bu döner lalnın endüvi sargılarında meydana getirdiği EMK dalgası komütatöre göre aynı hızla hareket eder. Eğer endüvi sabit tutulursa bu taktirde komitatör üzerindeki sabit fırçalarda fine
f
1 frekanslı üç fazlı bir gerilim sistemi elde edilir. Şayet endüvi döner alan hızı ile döner alan yönünde çevrilirse elde edilen gerilim sisteminin frekansı sıfır , aynı hızla ve fakat döner alan zıt yönde çevrilirse 2f
1 olur. Demek ki tahrik motorunun devri +n
sf ile -n
sf arasında değiştirilmek suretiyle sekonder gerilimini değeri sabit kalmak suretiyle frekansı 0 ile 2f
1 arasında ayarlanabilir. Frekanstan bağımsız olarak gerilimin genliği ise TR ayar transformatörü ile değiştirilebilir.Serbest ikazlı frekans değiştiricide gerek frekans değiştirici ve gerekse besleme transformatörü devir sayısı ayar edilecek M tahrik edilecek motor büyüklüğünde , fakat TM tahrik makinesi ise sadece frekans değiştiricinin sürtünme ve vantilasyon kayıplarını karşılamaya yeter büyüklükte ufak güçlü bir makinedir.
Bu faydasına karşılık serbest ikazlı frekans değiştiricinin güç alanı sınırlıdır. Belirli güçlere kadar inşa edilip kullanılabilmektedirler.
4 – Yarı İletken ( Tristör Veya Izgara Ayarlı Gazlı Deşarj Redresörleri ) Kullanmak
Güç elektroniğinde özellikle transistör ve tristörlerin yapı tarzlarında elde edilen son gelişmeler ; verimleri yüksek ve son derece ucuz olan bu statik cihazların doğru ve alternatif akımlı bir çok tahrik ve ayar sistemlerinde geniş ölçüde kullanılmalarına vesile olmuştur. Bu ayar redresörleri doğru akımlı tahrik ve ayar sistemlerinden başka , üç fazlı asenkron motorlara yol verme , devir sayısı ayarında ve koruma işlerinde de kullanılmaya başlanmıştır. Bunların kren işletimi , gemiler ve çeşitli iş makinelerinde her an rastlamak mümkündür.
Tristör ve gazlı deşarj tüpleri , redresör olarak alternatif akımı doğru akıma , ondülör olarak doğru akımı alternatif akıma çevirme işini gördüklerinden başka frekans transformatörü olarak da kullanılmaktadır. Bu ızgara veya kapı ayarlı yarı iletkenlerle şebeke frekansını doğrudan doğruya daha küçük bir frekansa , düşürmek mümkündür. Fakat şebeke frekansının üstünde daha yüksek bir frekans elde etmek için önce alternatif akımı bir redresör grubu ile doğru akıma çevirmek , bundan sonra bu doğru akımı daha yüksek frekanslı alternatif akıma çevirmek için ikinci bir ondülör grubu kullanmak gerekir.
Şekil 13 iki farklı frekans değiştirme metoduna ait şematik bağlantı
Tristörlü üç fazlı köprüler kullanarak sincap kafesli asenkron motorun hız kontrolunu yapan inverter devre düzeni sekil 14 de gösterilmiştir. Bu düzende sabit frekanslı bir alternatif akım kaynağının gerilimi üç fazlı tristör köprüsü yardımı ile doğru akıma çevrilir. Bu doğru gerilim üç fazlı tristör köprüsüne uygulanır.
Tristörler alternatif akımı bir yönde geçirdiği için motorun faz
sargılarından her iki yönde de akım geçebilmek için , genellikle her faz için iki tristör kullanılır. Tristörün tam ateşlemesinde , üzerinde gerilim ihmal edilecek kadar küçük olduğundan hiç geçirmediği zaman kaynağın bütün gerilimini üzerine alır. Aşağıdaki şekilde sincap kafesli motorun bir faz sargısına uygulanan gerilimin tristör ile kontrolü gösterilmiştir.
ŞEKİL – 14 Asenkron motorun bir fazına uygulanan gerilimin tristör yardımı ile değişimini gösteren prensip şema
Sincap kafesli asenkron motorun stator sargısının yıldız yada üçgen olarak bağlanışı da mevcuttur. Bu bağlantılarda elde edilen gerilim dalga şekli bozuk olduğu için asenkron motorlarda yüksek harmonikler oluşur. Gürültü ve ısınma meydana gelir. Bunun önlenmesi için tristörle birlikte ototrafo da kullanılır.
Stator geriliminin değiştirilmesinde kullanılacak güç elektroniği çeviricisi a.a. kıyıcısıdır. Hız denetimi açısından en uygun olan a.a. kıyıcısı her faza ters yönde paralel bağlanmış tristörlerden oluşan tam dalga denetimli a.a. kıyıcısıdır.
ŞEKİL – 15 Tam denetimli a.a. kıyıcı ile denetim
Hız denetimi yarım dalga denetimli bir a.a. kıyıcı ile gerçekleşebilir. Ancak bu durumda kontrol edilen motorda gürültü gibi istenmeyen durumlar ortaya çıkabilir.
Tam denetimli a.a kıyıcı ile yapılan denetimde dört ilave tristör daha ilave edilerek faz sırasını değiştirme imkanı elde edilerek regeneratif frenleme ve ters yönde çalışma olanağı elde edilir. Aşağıda bu durum incelenmiştir. Tahrik ( sürücü ) sistemlerinde , bir frenleme sırasında motor kinetik enerjisinin kaynağa geri verilmesine regeneratif frenleme denir. Ayrıca reküperasyon olarak adlandırılır.
ŞEKİL – 16 Regeneratif frenleme ve ters yönde çalışma
Belirli bir hızda çalışmakta olan motorun besleme frekansı aniden düşürülecek olursa kayma negatif bir değer alır ve motor yeni bir değer alıncaya kadar yavaşlar. Bu sırada motorun önceki çalışmasından biriken kinetik enerji kaynağa geri verilerek regeneratif frenleme sağlanmış olur. Diğer taraftan stator döner alanının yönü faz sırası değiştirilerek değiştirilirse stator ve rotor döner alan yönleri birbirine ters olacağından kayma birden büyük olur ve motor frenleme modun da çalışmaya başlar. Endüklenen motor moment rotor dönüş yönüne zıt olacağından motor çok
hızlı şekilde yavaşlar. Motor sıfır hıza ulaştığında kaynaktan ayrılmazsa bu kez ters yönde dönüş başlar.
Diğer bir frenleme türü de stator uçları kaynaktan ayrılır ve iki faz birleştirilir. Bu birleştirilen faz ucuna ve diğer faza bir doğru gerilim kaynağı bağlanırsa stator alanı hareketsiz kalacağından kayma doğrudan rotorun hızına bağlı olur. Böylece frenleme sağlanmış olur
Tristörden kapılara uygun bir kontrol işaretleri verilerek çıkışından üç fazlı değişken frekanslı gerilim elde edilmiş olur. Tristörler ters yönde enerji iletmeyeceğinden şekil 17 de motorun generatör olarak çalışması halinde enerji şebekeye geri verilemez.
Şekil 17 Sabit frekanslı alternatif gerilimi doğru gerilime , doğru gerilimi
de alternatif gerilime çeviren inverter ile sincap kafesli asenkron motorun hız ayarı
Doğru akım basamaklı inverterin çıkışı sinüs yerine dikdörtgen biçiminde alternatif gerilim verdiğinden bu gerilim yüksek harmonikleri ihtiva eder ve sincap kafesli asenkron motorun çalışmasını kötü yönde etkiler. Örneğin : ısınma ve gürültü v.b. Söz konusu inverterlerden 10 Hz – 1000 Hz frekansları arasında değişen frekanslı gerilim alma olanağı vardır. Ayrıca dalga şeklinin kare şeklinde olması , düşük frekanslarda , asenkron motorun çalışması üzerinde daha da olumsuz etki yapar. Bu bakımdan düşük frekanslarda cycloconverter adı verilen ve sabit frekanslı alternatif gerilimi , değişken frekanslı alternatif gerilime dönüştüren frekans değiştiriciler kullanılır.
Şekil 18 de cycloconverter yardımı ile üç fazlı sincap kafesli asenkron motorun hızını kontrol eden düzen gösterilmiştir. Güçleri 10 kw’tan 10000 kw’a kadar olan motorların 0 - 40 Hz frekans aralığında hız kontrolu ve ayarının yapılmasında bu yöntem kullanılır.
Şekil 18 50 Hz lik sabit frekanslı alternatif gerilim kaynağını kullanarak
değişken frekanslı ( 0 – 40 Hz ) bir gerilim kaynağı veren ve cycloconverter dene frekans değiştirici ile asenkron motorun hız ayarı yapılması
Frekans değiştirilmesi ile hız kontrolu yapan başka düzenler de vardır. Örneğin rotorunda kollektör , bilezikler ve sargı bulunan , statorunda üç fazlı sargısı bulunan bir converterin ( frekans değiştiricinin ) kollektör yanında bir indüksüyon regülatörü yardımı ile değişken gerilim verilirse , bileziklerden değişken frekans elde etem olanağı vardır. Bu sistemde V / f sabit kaldığı gibi bileziklerden 5 – 45 Hz arasında değişken gerilim elde edilebilir.