BAB II
LANDASAN TEORI
2.1 Komunikasi Nirkabel
Komunikasi Nirkabel adalah sebuah istilah yang merupakan gabungan dari 2 buah kata yaitu : komunikasi dan nirkabel. Adapun menurut Kamus Besar Bahasa Indonesia, komunikasi berarti pengiriman dan penerimaan pesan atau berita antara dua orang atau lebih sehingga pesan yang dimaksud dapat dipahami. Sedangkan nirkabel berarti tanpa menggunakan kabel.
Komunikasi nirkabel merupakan pengiriman dan penerimaan pesan antara dua orang atau lebih tanpa menggunakan media kabel. Jadi dalam penggunaannya jenis komunikasi ini lebih menekankan kepada media yang digunakan untuk pengiriman dan penerimaan pesan.
Adapun jenis dari Komunikasi nirkabel itu sendiri diantaranya : a. Wireless Wide Area Network (WWAN)
WWAN Adalah jenis jaringan nirkabel yang mencakup daerah yang luas, seperti antar kota atau negara, yang penyampaian media nirkabelnya menggunakan bantuan Satelit atau Antena.
b. Wireless Metropolitan Area Network
Merupakan teknologi jaringan nirkabel yang mencakup beberapa lokasi dalam satu area, misalnya antar gedung berbeda dalam satu kota atau antar gedung kampus sebuah Universitas.
c. Wireless Local Area Network (WLAN)
WLAN Adalah teknologi jaringan nirkabel yang mencakup satu area mikro, seperti dalam satu gedung kantor atau satu ruangan dalam sebuah bangunan.
d. Wireless Personal Area Network (WPAN)
WPAN Adalah teknologi jaringan nirkabel yang memiliki jangkauan area jarak dekat. Contohnya Bluetooth dan Infrared.
a. Infrared
Infrared adalah salah satu komunikasi nirkabel yang menggunakan perantara sinar Infra Merah (Infrared), dengan jarak yang dekat, tidak lebih dari 5 meter dan sinar Infra Merah tidak bisa menembus dinding atau penghalang, sehingga bila menggunakannya, antara transmitter dengan receiver harus berada pada posisi lurus dengan tidak ada yang menghalangi pancaran sinar Infra Merahnya. Penggunaan Infrared untuk pertukaran dan komunikasi data saat ini sudah banyak ditinggalkan, hanya pada beberapa alat saja yang masih menggunakannya, contoh: Remote Control perangkat elektronik rumah tangga juga pada detektor suhu. b. Bluetooth
Bluetooth saat ini sangat banyak digunakan sebagai pengganti Infrared, untuk komunikasi data, adalah komunikasi nirkabel dengan menggunakan media pancaran gelombang radio, tidak seperti Infrared, Bluetooth memiliki cakupan area komunikasi yang lebih luas juga karena menggunakan gelombang radio, Bluetooth tetap mampu digunakan untuk berkomunikasi meski terdapat penghalang diantara transmitter dan receiver. Gelombang radio Bluetooth bekerja pada rentang frekuensi 2,4 – 2,485 GHz (http://www.bluetooth.com/Pages/Basics.aspx – Spectrum). Teknologi Bluetooth memiliki daya tahan yang baik, rendah daya dan rendah biaya. Untuk dapat berkomunikasi dengan Bluetooth, antara transmitter dengan receiver harus melakukan otentikasi (pairing) terlebih dahulu dikarenakan dari strukturnya yang sama secara menyeluruh, sehingga perangkat apapun yang kondisi Bluetoothnya sedang ON, akan dapat terdeteksi oleh perangkat lain yang dalam kondisi sama, bila kedua perangkat tersebut masuk dalam cakupan area Bluetooth tersebut.
c. Wireless Fidelity
Sama seperti pada Bluetooth, dalam media komunikasinya menggunakan pancaran gelombang radio, namun berbeda frekuensi. Frekuensi Wireless Fidelity memiliki 3 frekuensi yaitu : 2,4 – 3,6 – 5 GHz. Wireless Fidelity memiliki kapasitas bandwidth hingga 11Mbps (Megabit per second) sehingga saat ini Wireless Fidelity banyak digunakan dalam perangkat
sebagai media dalam pelayanan Internet Nirkabel (Wireless Internet), karena bandwidthnya yang lebar, Wireless Fidelity mampu melayani banyak pengguna dalam waktu yang bersamaan, juga memiliki tingkat keamanan yang lebih tinggi dibandingkan dengan. Wireless Fidelity memiliki cakupan area yang lebih luas daripada Bluetooth. Dengan demikian Wireless Fidelity membutuhkan daya yang lebih besar, biaya yang lebih mahal, karena dalam pengaplikasiannya memerlukan hardware dan konfigurasi khusus.
d. Cellular Mobile Communication
Cellular Mobile Communication adalah sistem komunikasi nirkabel secara berpindah tempat (mobile) menggunakan sejumlah besar pemancar nirkabel berdaya rendah untuk menciptakan sel, area layanan geografis menjadi dasar dari sebuah sistem komunikasi nirkabel selular. Pemancar ini lebih dikenal dengan sebutan BTS (Base Transceiver Station). Di Indonesia, komunikasi selular menggunakan frekuensi diantaranya untuk GSM (Global System for Mobile) berada pada frekuensi 900 dan 1800 MHz sedangkan untuk CDMA (Code Division Multiple Access) berada pada frekuensi 800 dan 1900 MHz.
2.2 Open Loop System
Open Loop System adalah jenis sistem kontrol yang hanya menggunakan sinyal input untuk menjalankan output. Tidak ada umpan balik otomatis untuk menyesuaikan proses yang dijalankan, sehingga penyesuaian harus dilakukan secara manual oleh operator.
Dari gambar diatas, menunjukkan bahwa output langsung dikeluarkan dan tidak terjadi umpan balik ke dalam sistem sebagai parameter seting.
2.3 Close Loop System
Close Loop System Adalah jenis sistem kontrol yang secara otomatis mengubah output berdasarkan selisih antara sinyal umpan balik dengan sinyal input. Servomotor dapat digunakan pada sistem kontrol Close Loop.
Gambar 2.2 Skema sistem Close Loop
Berbeda dengan Open Loop, dari gambar diatas, menunjukkan ada sensor yang menerima masukan dari hasil pembacaan output, dimana hasil ini diolah oleh sensor untuk diumpan balikkan ke dalam sistem sebagai parameter seting dengan tujuan agar kontrol mendapatkan masukkan berdasarkan output yang diolah oleh sensor, sehingga sistem bekerja secara otomatis dan akurat.
Secara keseluruhan keuntungan dari sistem Open Loop adalah, • Sistem bekerja secara otomatis
• Sistem lebih stabil dan konstan karena pengaturan dilakukan oleh sensor • Kinerja sistem lebih akurat
2.4 Flow Chart
Flow Chart merupakan gambar diagram yang menunjukkan urutan langkah sebuah algoritma atau sebuah proses yang dipresentasikan berupa gambar kotak dengan berbagai jenis serta antara kotak yang satu dengan yang lain dihubungkan menggunakan garis panah.
Adapun simbol-simbol flowchart diantaranya,
Preparation
Predefined process
Diagram flowchart dapat juga digunakan untuk menganalisa, merancang dan mendokumentasikan atau mengelola sebuah proses kerja atau urutan algoritma, bahkan dapat juga digunakan sebagai pemecah masalah dalam sebuah proses dengan menguraikan langkah-langkah dari proses tersebut.
2.5 Mekanisme Pencari Jalan
Diantara banyak kemampuan dari Robot, salah satunya adalah kemampuan untuk mencari jalan . Dengan memanfaatkan sensor pendeteksi jarak untuk mendeteksi halangan yang dilalui robot saat berjalan, sebagai pengirim informasi ke dalam sistem robot, dimana informasi ini diolah sesuai dengan kode yang ditulis, sehingga akan menghasilkan keluaran/output berupa gerakan robot untuk berbelok kanan, kiri maupun untuk bergerak maju kedepan. Adapun hal yang banyak digunakan sebagai media pencari jalan dalam sebuah pengujian robot adalah dengan menggunakan Labirin.
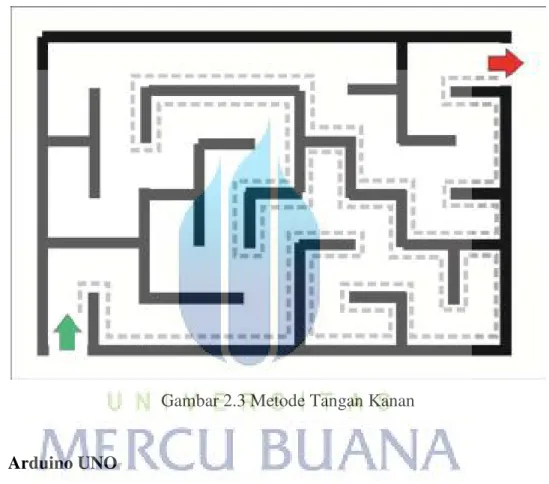
Labirin adalah sebuah tempat atau ruangan yang penuh dengan jalan atau lorong yang berliku-liku, simpang siur dan saling berhubungan. Sebuah labirin dapat digunakan dalam sebuah permainan dengan tantangan bagaimana cara menemukan jalan keluar sehingga terbebas dari labirin tersebut. Adapun salah satu metode penyelesaian dalam mencari jalan keluar dari labirin adalah metode “Tangan Kanan” Stored data Input/output data Decision Loop Connect or Document / print Terminator Off-page Reference Line Connector Control Transfer
Metode ini dilakukan dengan memanfaatkan tangan kanan yang digunakan sebagai patokan untuk menandai dinding sisi kanan labirin saat berada di posisi awal dan dinding sisi kanan ini sebagai acuan selama berjalan didalam labirin hingga menemukan jalan keluar labirin.
Meskipun dalam pelaksanaannya metode ini akan memerlukan waktu yang lebih lama dan jalan yang memutar, namun metode ini cukup efektif untuk menemukan jalan keluar dari sebuah labirin.
Gambar 2.3 Metode Tangan Kanan
2.6 Arduino UNO
Arduino Uno adalah papan mikrokontroller yang menggunakan IC ATMega328P sebagai “otak” pengolahnya. Arduino UNO memiliki 14 input/output digital, dimana 6 PIN diantaranya dapat digunakan sebagai output PWM, 6 input analog, 1 buah resonator keramik berfrekuensi 16MHz, port USB, jack power supply, header ICSP dan tombol Reset.
Untuk memprogramnya dilakukan melalui port USB yang dihubungkan dengan Komputer, dimana dasar pemrograman pada Arduino menggunakan Pemrograman Bahasa C dan untuk menggunakannya dengan memberikan power supply jenis DC (Direct Current) sebesar 7,5 - 12 volt. Bisa menggunakan baterai maupun dari DC Power Supply.
Gambar 2.4 Arduino Uno
(Sumber : http://arduino.cc/en/Main/arduinoBoardUno) Keterangan :
1. Port USB
2. Jack Power Supply
3. Digital Input-Output PWM
4. Header ICSP 5. IC ATMega328P 6. Tombol Reset Spesifikasi Arduino UNO : (Sumber :
http://arduino.cc/en/Main/arduinoBoardUno) Mikrokontroller : Atmega328 Voltase Operasi : 5V
Volt. Masukan (rekomendasi) : 7-12V DC Volt. Masukan (maks.) : 6-20V
Digital I/O Pin : 14 (6 pin sebagai PWM output) Pin Masukan Analog : 6
Arus DC tiap I/O Pin : 40 mA Arus DC untuk 3.3V Pin : 50 mA
Memori Flash : 32 KB (Atmega328) 0.5 KB sebagai bootloader
SRAM : 2 KB (Atmega328) EEPROM : 1 KB (Atmega328) Kecepatan Clock : 16 MHz 6 3 4 5 1 2
2.7 Bluetooth CZ-HC-05
Gambar 2.5 Modul Bluetooth (BT Shield V.2.2)
CZ-HC-05 merupakan modul Bluetooth basic-board dengan menggunakan board-modul tambahan berupa extended board dengan tujuan agar mudah dalam pengkabelan serta kompatibel dengan modul Arduino yang ada dipasaran sehingga mudah digunakan.
Gambar 2.6 Basic Board HC-05 (Sumber : Itead Studio – BT Shield 2.2)
Modul Bluetooth CZ-HC-05 ini berkomunikasi menggunakan port serial dan dapat digunakan baik secara master maupun slave dalam sebuah rangkaian Arduino. Modul Bluetooth ini kompatibel dengan modul Arduino dan
menggunakan port U port komunikasi anta UART ini, dilakukan Bluetooth dinyalakan. Spesifikasi CZ-HC-05 : Mikroprosesor Indikator Power Supply IO Protokol Komunikasi Frekuensi Sensitifitas Kekuatan Pancaran Antena G
Untuk dapat menggun setting preset parame pada pin KEY, sehin Command) yang merupa perintah AT Command kehendaki.
UART (Universal Asymmetric Receiver Trans ntar modulnya. Sedangkan untuk melakukan kukan dengan melakukan triggering-pin KEY pa
an. 05 : : CSR BC417 : LED State : 3,3 VDC : 6
si : UART dan Wireless Serial : 2,4 GHz
: -80 dBm : +4 dBm (RF) : internal
Gambar 2.7 Skema Bluetooth CZ-HC-05
nggunakan modul Bouetooth CZ-HC-05 ini, dipe ameter (AT Command) yaitu dengan cara mem
hingga Modul Bluetooth akan bekerja pada m erupakan mode dimana Chip Modul Bluetooth
and dan menyimpan sejumlah seting param
ansmitter) sebagai n konfigurasi port pada saat Modul
perlukan beberapa emberikan trigger mode CMD (AT dapat menerima rameter yang kita
2.8 2A Motor Shield Modul ini adala motor DC (Direct C (L298P), modul ini beban dan dengan fas DC. Masing-masing m
Gam
Sebagai proteksi mot peka terhadap arus ke
Adapun untuk melakuka jumper pada pin yang
4,8 – 35 VDC
M M
eld for Arduino (DFRduino L298P)
lah modul yang berfungsi sebagai pengatur t Current). Dengan menggunakan Chip dar ni mempunyai daya keluaran maksimal 2 Am
asilitas pengendalian motor sebanyak maksimum g motor diatur sebanyak 4 tingkat kecepatan.
mbar 2.8 2A Motor Shield (DFRduino L298P)
otor, modul ini menggunakan delapan buah di kejut bila terjadi hubungan pendek pada beban (
Gambar 2.8 2A pin & IO mapping
akukan konfigurasi modul ini, dapat dilakukan ng ada, diantaranya :
ur dan pengendali dari produsen LG mpere untuk tiap um 2 buah motor
298P)
diode zener yang n (motor).
kukan dengan setting
Selektor Input Power
Mode kendali kecepatan
1. Selektor Input Power PIN
Gambar 2.10 Soket Power
PWRIN : Jumper pin pada posisi ini, sumber catu daya berasal dari eksternal supply, bisa menggunakan baterai tambahan. VIN : Jumper pin pada posisi ini, sumber catu daya daya berasal dari Board Arduino yang terhubung.
Posisi jumper pada PWRIN digunakan bilamana Motor yang dikendalikan (beban) mengalami kekurangan daya.
2. Mode kendali kecepatan
Gambar 2.11 Pin PWM
Terdapat 2 mode pengaturan dengan masing-masing memiliki konfigurasi pin, yaitu :
PWM (Pulse Width Modulation)
• E1 = pin 4 (Motor 2 kendali arah putaran) • M1 = pin 5 (Motor 2 PWM control)
• E2 = pin 6 (Motor 1 PWM control) • M2 = pin 7 (Motor 1 kendali arah putaran) PLL (Phase Locked Loop)
• E1 = pin 5 (Motor 2 kendali arah putaran) • M1 = pin 4 (Motor 2 enable control) • E2 = pin 6 (Motor 1 kendali arah putaran) • M2 = pin 7 (Motor 1 enable control)
Spesifikasi teknis modul 2A Motor Shield for Arduino (DFRduino L298P) Microchip Controller : LG – L298P
Logic Control Voltage : 5V DC (from Arduino) Motor input voltage : 4,8 – 35V DC
Max. Motor Current : 2 pcs (masing-masing 2 Amper)
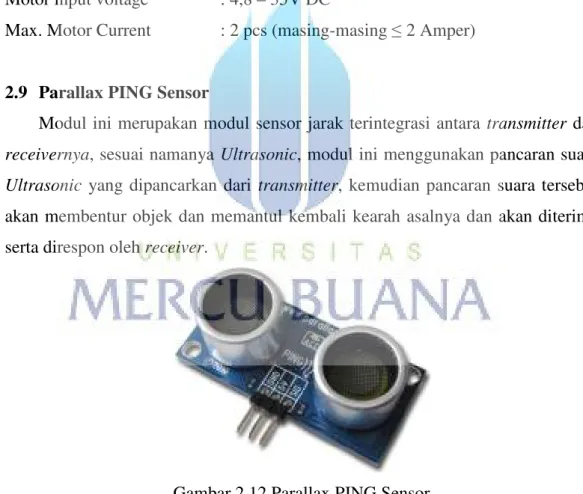
2.9 Parallax PING Sensor
Modul ini merupakan modul sensor jarak terintegrasi antara transmitter dan receivernya, sesuai namanya Ultrasonic, modul ini menggunakan pancaran suara Ultrasonic yang dipancarkan dari transmitter, kemudian pancaran suara tersebut akan membentur objek dan memantul kembali kearah asalnya dan akan diterima serta direspon oleh receiver.
Gambar 2.12 Parallax PING Sensor
(Sumber: https://lh5.googleusercontent.com/-6dOxiHRa5XE/TxzdFI0su-I/AAAAAAAAAQY/TvfE7zjyVv4/s1600/Parallax_Ping_Lo.jpg)
Modul sensor ini mem • GND (groundi • 5 V (Powe • SIG = pin
Ga
Dari port Trigger, m untuk memancarkan s memantul pada dindi kembali kepada sens untuk selanjutnya signal
Gam (Sumber : http://ww
emiliki 3 pin konektor yang terdiri dari pin : grounding) = polaritas catu daya (-).
ower supply input) = polaritas catu daya (+) maks pin Echo send dan Echo Receive (bergantian)
ambar 2.13 Skema kinerja signal Ultrasonic
masuk perintah kepada sensor Transmitter (w signal ultrasonic (garis hijau), yang kemudian nding kemudian pantulan signal ultrasonic (ga
nsor dan direspon oleh sensor Receiver (war ignal ini akan diteruskan kepada port Echo.
mbar 2.14 Karakteristik waktu diagram signal
http://www.robot-electronics.co.uk/images/srf05tma
aks. 5VDC.
(warna hijau – T), udian signal ini akan garis merah) akan arna merah – R),
nal
Dari diagram diatas, nampak karakteristik berbanding waktu dari pancaran signal Ultrasonic, pada baris atas perintah dikirimkan kepada modul sensor melalui port Trigger minimum 10µS (microsecond), sensor Transmitter akan memancarkan gelombang ultrasonic (sonic_burst) sebanyak 8 kali secara berturut-turut. Kemudian output signal melalui port Echo berupa signal sepanjang 100µS – 25mS (millisecond) dan akan timeout setelah 30mS, bila ternyata tidak ada dinding atau objek yang memantulkan signal ultrasonic yang dipancarkan.
Spesifikasi teknis :
(Sumber : http://www.seeedstudio.com/wiki/Grove_-_Ultrasonic_Ranger) Jarak deteksi : 3 cm – 400 cm (deteksi terbaik pada sudut 30 derajat) Fekuensi gelombang : 40 kHz
Input Power : 5 VDC (minimum 3,3 VDC) Konsumsi daya : 15mA
Output : port PWM
2.10 Arduino 1.0.5 (updateable)
Arduino v.1.0.5 merupakan aplikasi open source dari Arduino yang dibuat untuk memudahkan proses pemrograman board Arduino. Tool ini dapat beroperasi pada sistem Operasi Windows, MacOS maupun Linux. Dalam penulisan kode program Arduino, menggunakan dasar pemrograman Bahasa C kemudian untuk menyimpannya ke dalam memory modul Arduino, menggunakan fitur upload yang ada pada tool ini.
Untuk versi rilis Arduino 1.0.5 ini kompatibel dengan modul Arduino tipe : Arduino UNO, Mega2560, Duemilanove, Mega dan Diecimila.
Gambar 2.15 Interface Arduino 1.0.5
Keterangan :
1. Main Toolbar
= Verify, digunakan untuk memferifikasi antara kode program yang dibuat dengan yang ada pada memory Arduino.
= Upload, digunakan untuk menyimpan kode program yang sudah ditulis ke dalam memory Arduino.
= New, digunakan untuk membuat halaman baru pada aplikasi program.
= Open, digunakan untuk membuka file projek Arduino yang disimpan dalam media penyimpanan komputer. File ini berekstensi “.ino”.
= Save, digunakan untuk menyimpan kode program yang sudah dibuat ke dalam media penyimpanan internal komputer, agar mudah dikembangkan lebih lanjut.
2. Header dengan Nama File projek
3. Halaman utama, tempat dimana kode program ditulis
6 3
2 5
4 1
4. Serial monitor, digunakan untuk memeriksa status port serial yang digunakan untuk berhubungan dengan Modul Arduino
5. Tab Navigator, adalah tombol navigasi multi-tab halaman utama, bila ternyata diperlukan tambahan tab baru dalam proses penulisan kode. 6. Status Port, menginformasikan status Port Arduino yang terhubung
dengan komputer.
Pada gambar dibawah ini, merupakan contoh penulisan kode program sederhana pada Arduino v.1.0.5, secara garis besar metode penulisan kode programnya tidak berbeda dengan standar penulisan kode program Bahasa C, hanya saja bila hendak menggunakan pin tertentu pada modul Arduino, nomor dari pin yang akan digunakan, ikut di deklarasikan.
Gambar 2.16 Contoh Kode sederhana pada Arduino 1.0.5
2.10 Penerapan Close Loop
Dalam pembuatan media pengujian, penulis menggunakan skema Close Loop system, dimana pengaturan kendali robot dilakukan berdasarkan hasil pembacaan sensor ultrasonik yang dipasang. Terutama pada operasi Pencari Jalan, untuk mendeteksi adanya halangan dinding, menggunakan sensor Ultrasonik dan juga pada operasi pengiriman perintah (trigger) dari Robot Transmitter kepada Robot Receiver, berdasarkan pada deteksi Bluetooth yang sudah diatur jaraknya antara Robot Transmitter dan Robot Receiver.
Gb. 2.17 Close-Loop Sistem Mekanisme Pencari Jalan
Keterangan : E : Input
M : Motor penggerak
Pertama, diawali perintah dari kode yang dieksekusi, untuk mengaktifkan 2 buah motor, yang kemudian sensor jarak aktif secara terus menerus, dengan mengirimkan sinyal hasil deteksi jarak kepada Board Arduino, untuk memandu Arduino sistem untuk mengendalikan operasi motor.