BAB 3
PERANCANGAN SISTEM
Dalam merancang sebuah sistem, penting dilakukan beberapa pendekatan dan analisis mengenai sistem yang akan dirancang.Pada Perancangan Prototipe Mobile Robot Pemindah Benda, diperlukan beberapa analisis berupa keseimbangan tubuh robot, perancangan perangkat keras, perancangan piranti lunak dan perancangan rancang bangun.
3.1 Analisis Keseimbangan Robot
Dalam merancang sistem Mobile Robot Pemindah Benda ini, diperlukan analisis mengenai keseimbangan tubuh robot pada saat diam, bergerak maupun pada saat robot mengambil benda. Keseimbangan diperlukan oleh robot pada saat diam maupun bergerak,hal ini dikarenakan agar mobile robot maupun lengan robot tidak kehilangan keseimbangaan dan jatuh. Pada perancangan ini, berat badan robot ditopang dengan menggunakan empat buah roda, yaitu dua buah roda berdiameter 5 cm, dan dua buah caster ball yang berfungsi sebagai penopang pada bagian depan robot dan belakang robot. Dengan asumsi bahwa berat mobile robot tanpa lengan robot bersifat homogen, maka berat badan robot tersebut tersebar secara merata sepanjang seluas penampang tubuh robot tersebut dan pusat massanya terletak di tengah-tengah badan robot. Dari segi keseimbangan mobile robot dengan lengan yang akan dirancang, dengan asumsi kondisi bentuk badan dan lengan robot adalah normal, yaitu dimana tubuh robot
dan lengan tidak dapat ditekuk maupun tidak lentur, terdapat beberapa kemungkinan kondisi mobile robot agar tidak jatuh.
3.1.1 Analisis Pusat Berat Robot
Pusat berat adalah titik dimana berat total sebuah benda bekerja sehingga torsi yang dihasilkan terhadap sembarang titik sama dengan torsi yang dihasilkan oleh berat masing – masing partikel yang membentuk benda tersebut [3]. Jadi, pusat berat sebuah benda adalah titik yang terhadap gaya – gaya berat yang bekerja pada semua partikel benda itu menghasilkan torsi nol. Untuk benda yang serba sama, seperti bola/tongkat yang serbasama, pusat berat terletak pada pusat geometri benda.
Untuk partikel – partikel dengan berat yang sama (homogen), pusat berat berada diantara kedua partikel. Bila beratnya tidak sama, maka pusat berat berada lebih dekat ke partikel dengan berat yang lebih besar. Pusat berat benda bidang yang berbentuk tak teratur terletak tepat di bawah tiap titik putar benda. Sifat ini dapat digunakan untuk menentukan letak pusat berat benda.
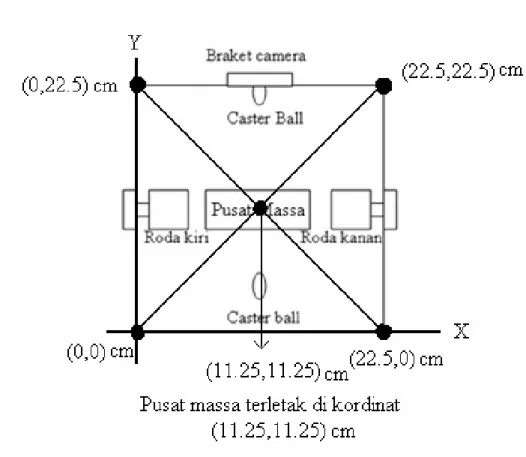
Dalam perancangan Mobile Robot Pemindah Benda ini, pusat massanya terletak di tengah-tengah badan robot dengan asumsi berat mobile robot bersifat homogen. Posisi pusat massa ini perlu diperhatikan agar dapat diperoleh keseimbangan pada robot agar robot tidak kehilangan keseimbangan pada saat memindahkan benda sambil berjalan. Pada saat perancangan, diasumsikan robot dalam keadaan diam. Sehingga dengan demikian, maka pusat massa pada robot terletak dikordinat (11.25,11.25)cm hasil ini didapat berdasarkan garis diagonal mobile robot serta dimensi panjang dan lebar mobile robot (22,5cm).
Pada Mobile Robot Pemindah Benda ini, pusat massanya terletak di tengah-tengah badan robot dengan asumsi berat mobile robot bersifat homogen. Dikarenakan bentuk penampang dimana lengan robot berada adalah persegi. Posisi pusat massa ini perlu diperhatikan agar dapat diperoleh keseimbangan pada robot agar robot tidak kehilangan keseimbangan pada saat memindahkan benda sambil berjalan. Pada saat perancangan robot, diasumsikan robot dalam keadaan diam. Sehingga dengan demikian, maka pusat massa pada robot terletak dikordinat (11.25,11.25)cm hasil ini didapat berdasarkan garis diagonal mobile robot serta dimensi panjang dan lebar mobile robot (22,5cm).
3.2 Rancang bangun
Setelah analisis berat badan dan komponen motor DC yang digunakan,langkah selanjutnya adalah perancangan mekanik robot :
Bagian ini meliputi semua tahap pengerjaan yang berhubungan langsung dengan rangkaian diantaranya :
1. Pembuatan jalur PCB (Printed Circuit Board) 2. Pembuatan bentuk mekanik robot
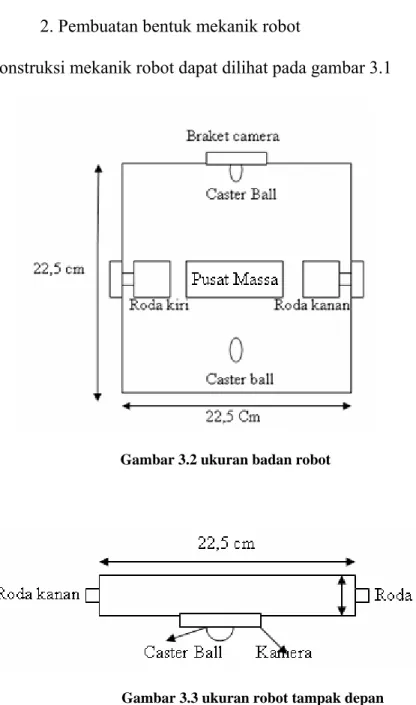
Konstruksi mekanik robot dapat dilihat pada gambar 3.1
Gambar 3.2 ukuran badan robot
Gambar 3.4 Sketsa bentuk robot tampak samping
Gambar 3.5 Sketsa bentuk mobile robot tampak depan
Sistem yang akan dikontrol disini adalah untuk mengendalikan arah mobile robot dengan menggunakan komunikasi bluetooth, mobile robot supaya bisa menelusuri jalurnya. Mobile Robot tersebut menggunakan empat
buah roda, dimana roda 1 dan 2 berfungsi sebagai penggerak lajunya robot dan roda 3 dan 4 sebagai pengarah. Perencanaan penggerak pada robot digunakan dua buah. Motor DC yang dihubungkan ke roda 1 dan 2. Putaran motor akan menyebabkan roda berputar, sehingga robot dapat berjalan pada jalurnya, dan roda 3 dan 4 (caster ball) sebagai penopang dari tubuh robot agar robot tidak jatuh saat bergerak. Dan untuk mengambil serta memindahkan benda digunakan lengan robot yang sudah jadi (ROBOT ARM MR 999-E).
Gambar 3.7 Robot ARM MR 999-E
Pemilihan bahan yang dipakai untuk membentuk badan robot, pada perancangan badan robot ini tidak dapat ditekuk. Untuk perancangan badan robot ini dibuat dari bahan acrilic, yang dibentuk dan dirancang sedemikian rupa sehingga badan robot ini dapat menahan berat lengan robot. Badan robot menggunakan bahan acrilic dengan ketebalan 0,2 cm dan 0,5 cm,dengan ukuran seperti pada gambar diatas.
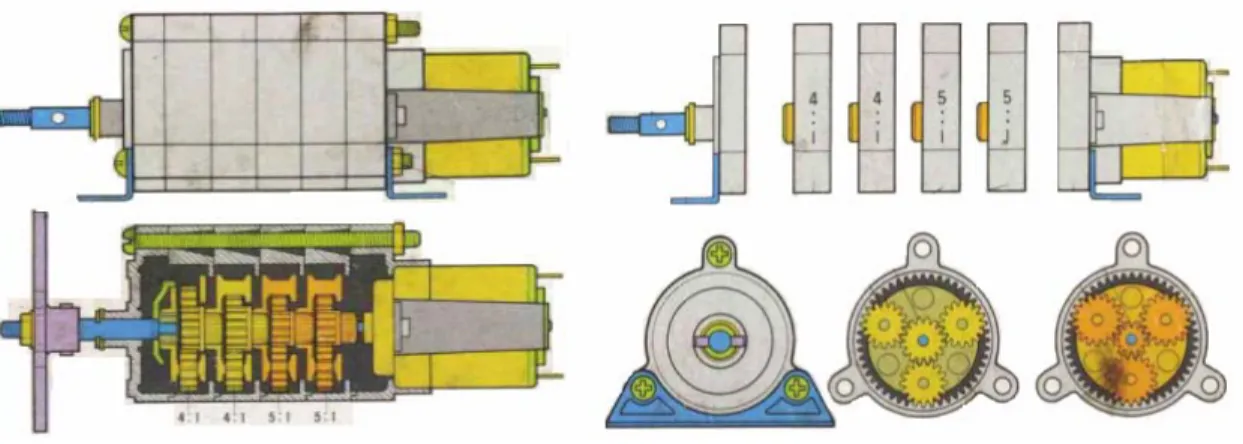
Mobile Robot yang dirancang Menggunakan 2 buah motor DC Planetary Gear Box Set produksi ”TAMIYA” yang berperan untuk menggerakan roda pada mobile robot.
Gambar 3.8 Motor DC PLANETARY GEARBOX SET
Gambar 3.9 Perbandingan Gear Motor DC PLANETARY GEARBOX SET
Motor adalah mesin yang dapat mengubah energi listrik menjadi energi mekanik atau gerak, dimana tenaga gerak itu merupakan putaran pada rotor. Suatu motor DC mempunyai pengertian dimana sebuah mekanisme suatu motor merupakan sistem automatic dalam mengendalikan sumber daya ke suatu beban mekanik (Semakin beban nya besar maka secara otomatis motor DC mengambil daya semakin besar). Pada kemasannya tidak tertera spesifikasi dari motor tersebut. Untuk mengetahui ratting arus pada motor yaitu dengan test, test yang
dilakukan dengan menghubungkan resistor 10 Ω pada salah satu terminal dan pengukuran tegangan dilakukan pada resistor. Hasil pengukuran adalah
• Motor bergerak tanpa beban (diangkat) didapat 5,18 V (518 mA). • Motor bergerak dilantai tanpa lengan robot didapat 5,09 V
(509mA).
• Motor bergerak dilantai dengan lengan didapat 4,94 V (494 mA). • Motor tidak bergerak 1,2 V (120 mA)
Mobile Robot yang dirancang menggunakan 2 buah roda yang berperan untuk menentukan arahnya dan 2 buah ball bearing yang berfungsi untuk mengikuti arah Mobile Robot bergerak.
Gambar 3.10 Wheel Set Gambar 3.11 Caster Ball Dua roda pada gambar 3.9 merupakan roda produksi Tamiya dengan ukuran diameter 5 cm yang terbuat dari bahan karet, sedangkan pada gambar 3.10 merupakan roda ball bearing dengan ukuran 1 cm dan tinggi 3.7 cm, yang dapat melakukan perputaran bebas sehingga pada waktu Mobile Robot berbelok gesekan yang dihasilkan lebih kecil sehingga tidak menambah beban pada Mobile Robot.
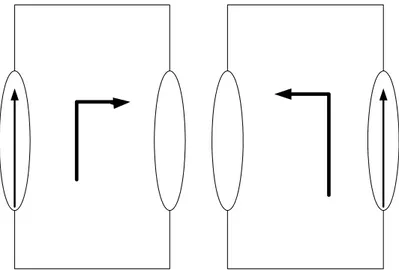
Berikut ini adalah gambar dari pergerakan roda yang dapat dilakukan oleh Mobile Robot :
Gambar 3.12 Pergerakan roda bergerak maju
Untuk pergerakan maju maka kedua roda tersebut akan berputar maju dengan kecepatan yang sama.Ini dikarenakan kedua motor DC yang dipakai pada Mobile Robot mempunyai jenis yang sama.
Untuk berbelok ke kanan maka roda kiri berputar maju dan roda kanan diam, sebaliknya untuk berbelok ke kiri maka roda kanan berputar maju dan roda kiri diam.
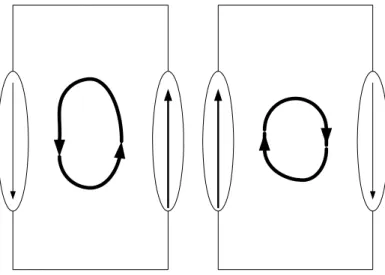
Untuk mutar 3600 kekiri secara ditempat maka roda kanan berputar maju dan roda kiri berputar mundur dengan kecepatan yang sama, dan sebaliknya untuk mutar 3600 kekanan secara ditempat maka roda kanan berputar mundur dan roda kiri berputar maju dengan kecepatan yang sama.
Gambar 3.14 Pergerakan roda mutar kiri dan mutar kanan
3.2.1 Perancangan Perangkat Keras
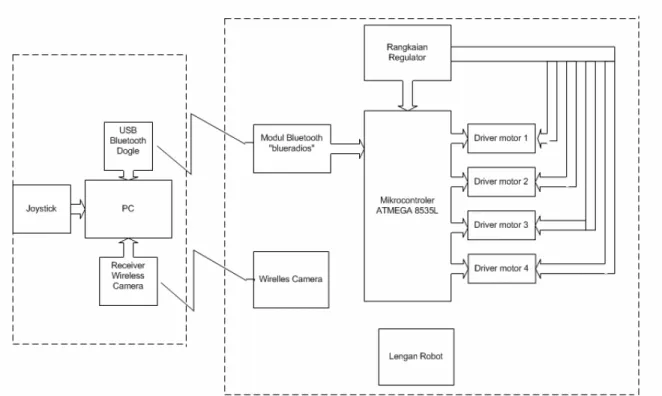
Rangkaian elektronika dari robot ini terdiri dari beberapa blok. Dimana diagram blok tersebut seperti gambar Gambar 3.15.
Gambar 3.15 Diagram Blok mobile Robot
Sesuai dengan diagram Mobile Robot diatas, perancangan mobile robot dibagi ke dalam modul-modul sebagai berikut :
• Modul AVR 8535L yang berperan sebagai pusat pengendali pada mobile Robot.
• Modul driver motor yang berfungsi menggerakan motor DC.
• Modul bluetooth yang berfungsi sebagai media untuk dapat berkomunikasi antara mobile robot dengan PC.
• Modul lengan robot ARM MR-999E untuk mengambil serta memindahkan barang.
• Modul Wirelles camera untuk melihat benda yang akan diambil dari komputer.
• Modul Regulator yang berfungsi menyediakan catu daya bagi mobile robot sesuai kebutuhan.
• Gamepad berfungsi untuk mengendalikan gerak dari robot.
3.2.2 Modul Pengendali
Setelah rancangan sistem mekanik robot dan peletakan lengan robot serta motor DC, maka selanjutnya adalah merancang modul pengendali yang
Gambar skematik rangkaian :
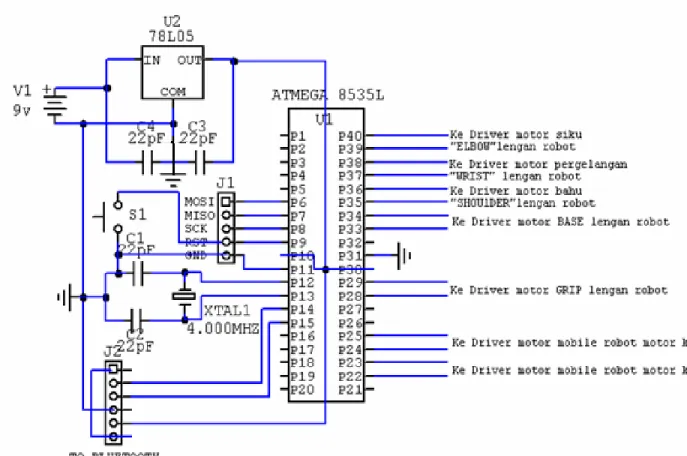
Gambar 3.17 Skematik Rangkaian modul AVR
Modul pengendali ini menggunakan sebuah mikrokontroller ATMEGA 8535L yang memiliki 40 pin dengan intruksi 8 bit. Modul AVR terdiri dari sebuah microntroler U1 ATMEGA 8535, rangkaian pembangkit pulsa, dan rangkaian reset. Dalam perancangan ini output yang digunakan 14 pin.
Dimana port-port yang digunakan dalam IC ini adalah:
• PC 0 sampai port PC 3 : rangkaian driver motor untuk mengontrol gerakan motor DC pada mobile robot.
• PC 6, PC 7 : rangkaian driver motor untuk mengontrol gerakan motor Grip pada lengan robot.
• PA 0, PA 1 : rangkaian driver motor untuk mengontrol gerakan motor Elbow pada lengan robot.
• PA 2, PA 3 : rangkaian driver motor untuk mengontrol gerakan motor Wrirst pada lengan robot.
• PA 4, PA 5 : rangkaian driver motor untuk mengontrol gerakan motor Shoulder pada lengan robot.
• PA 6, PA 7 : rangkaian driver motor untuk mengontrol gerakan motor Base pada lengan robot.
• PD 0 (RXD), PD 1 (TRX) : Port untuk mengirim dan menerima data dari pc dengan komunikasi bluetooth.
Cara kerja rangkaian :
Perancangan mikrokontroller yang digunakan ber - default low, pin reset pada (S1) aktif low (aktif jika diberikan tegangan low). Bila tombol ditekan maka tegangan low akan membuat pin reset aktif. Rangkaian reset terdiri dari sebuah pushbutton yang terhubung dengan ground, rangkaian reset dapat dilihat dibawah ini :
Gambar 3.18 Rangkaian Reset pada AVR
Perlu diketahui bahwa pin reset pada ATMEGA 8535L adalah active low, sehingga saat saklar ditekan maka tegangan low (ground) akan masuk ke dalam ATMEGA 8535L. Pemberian pulsa clok pada mikrokontroller menggunakan kistal dengan ukuran 4,00 MHz. Rangkaian pembangkit pulsa clock terdiri dari
sebuah kristal yang mempunyai frekuensi 4,00MHz dan 2 buah kapasitor yang bernilai 22 pF.
Rangkaian pembangkit pulsa clock dapat dilihat dibawah ini :
Gambar 3.19 Rangkaian Pembangkit pulsa Clock pada AVR
Pin XTAL1 dan XTAL2 pada AVR, masing-masing dihubungkan pada sebuah kapasitor. Kristal berfungsi membangkitkan frekuensi sebesar 4,00 MHz, sedangkan besarnya kapasitor dipilih untuk menjaga stabilitas frekuensi.
Sedangkan untuk mengaktifkan mikrokontroller, diperlukan catu daya sebesar 5 Volt DC. Untuk mendapatkan tegangan sebesar 5 Volt tersebut, maka diperlukan sebuah IC regulator, yaitu IC regulator 7805.
Rangkaian Regulator dapat dilihat dibawah ini :
Gambar 3.20 Rangkaian Regulator
IC regulator 7805 berfungsi sebagai penurun tegangan , sehingga tegangan yang keluar sebesar +5 Volt, kapasitor non polar pada regulator berfungsi sebagai penghilang efek ripple.
Penulisan program ke mikrokontroller didownload dari Pc melalui port parallel dengan konektor DB 25 pada PC.
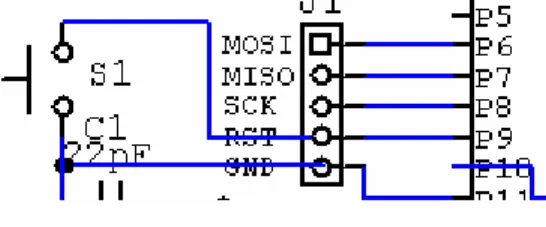
Gambar 3.21 ISP Pada AVR
Untuk penulisan program ke AVR digunakan pin MOSI, MISO, SCK, RST, GND, dengan menggunakan program codevision.
Port TX dan RX digunakan untuk mengirim data dari PC ke AVR 8535L dengan mengunakan Bluetooth blueradios.
3.2.3 Modul Driver Motor
Pengontrolan motor DC menggunakan sebuah IC driver L298n yang dapat mengontrol dua buah motor dalam satu IC, pengontrolan dilakukan dengan memberikan sinyal pulsa ke driver motor yang mana merupakan pengontrol hidup matinya gerak motor, untuk mengaktifkan driver motor dibutuhkan catu daya sebesar 5 Volt dan untuk menjalankan motor DC driver ini memerlukan catudaya sebesar 6 Volt.
IC driver ini memungkinkan pengendalian dari motor yang lebih mudah karena mempunyai fungsi – fungsi pengendalian yang sudah terintegrasi, yaitu :
Enable
Berfungsi untuk pengaktifan motor, apabila motor dalam keadaan diam maka motor dapat dimatikan untuk menghemat sumber batere yang digunakan.
Berfungsi untuk sistem pengamanan darurat, apabila dalam keadaan tertentu motor menerima beban atau arus yang berlebih maka IC akan mengirimkan sinyal sebagai tanda bahwa terjadi kesalahan atau beban berlebih, fungsi ini dapat digunakan sebagai feedback otomatis dalam pengendalian motor agar motor akan langsung mati apabila terjadi kelebihan beban sehingga motor tidak rusak.
Cara kerja dari driver motor sebagai berikut :
Pin enable diaktifkan dan motor akan langsung berjalan sesuai dengan sinyal yang diberikan output atau arah putaran dari motor sepenuhnya kepada logic yang diberikan kepada pin-pin input logic dan arah putaran dari motor sebagai berikut :
Gambar 3.22 Block Diagram L298n
Transistor yang berada pada pin current sensing berfungsi untuk mengetahui apakah motor dalam keadaan kelebihan arus atau beban, apabila terjadi kelebihan arus atau beban maka pin current sensing akan berada dalam logic HIGH, logic ini akan mengaktifkan transistor dan output dari transistor mengeluarkan logic LOW. Transistor kedua berfungsi sebagai kontrol tambahan, apabila dalam keadaan normal ingin mematikan fungsi current sensing maka logic HIGH dikirimkan kedalam transistor dan current sensing mode akan dimatikan.
Mobile Robot menggunakan 1 buah driver motor l298n dan untuk lengan robot menggunakan 3 buah driver motor l298n. IC l298n ini dapat menggerakan motor DC dengan arus maksimal sampai 3 A.
Modul driver motor ini menggunakan 2 buah H – bridge dioda IN4001,masing – masing motor memerlukan 4 buah dioda. Dioda ini berguna untuk mencegah masuknya arus balik dalam tegangan logic.
Pada pin enable IC L293N diberi tegangan High sebesar <Vss untuk mengaktifkan channel driver, sedangkan pin input dihubungkan ke port ATMEGA 8535L.
Trimpot 100 untuk mengatur kecepatan pergerakan motor, semakin hambatannya besar maka laju motor akan semakin lambat dan sebaliknya semakin hambatannya kecil maka semakin cepat laju putaran motor. Untuk mengatur besar hambatan putar kekanan pada trimpot maka akan menghasilkan hambatan yang besar dan sebaliknya untuk mengatur kecil-nya hambatan maka putar ke kiri pada trimpot-nya.
3.2.4 Modul Catu Daya
Modul catu daya pada Mobile Robot menggunakan battery sebanyak 2 buah, battery sebesar 6 volt sebagai sumber tegangan untuk menggerakan mobile robot dan lengan robot, dan 1 buah battery sebesar 9 volt digunakan sebagai sumber tegangan Vs pada modul driver motor, AVR, Bluetooth.
Gambar 3.24 Modul Regulator
IC regulator 7805 digunakan sebagai penurun tegangan , sehingga tegangan yang keluar sebesar +5 Volt, kapasitor non polar pada regulator berfungsi sebagai penghilang efek ripple.
3.2.5 Modul Bluetooth
Mobile Robot memerlukan suatu media untuk dapat berkomunikasi dengan PC, oleh sebab itu digunakan jalur komunikasi serial dalam bentuk modul bluetooth. Bluetooth adalah suatu teknologi komunikasi wireless yang memanfaatkan frekuensi radio 2.4 GHz untuk menghubungkan perangkat-perangkat secara terpisah. Pada modul Bluetooth sudah terdapat tranceifer dan receiver. Modul Bluetooth yang digunakan “Blueradios” Bluetooth dan usb bluetooth yang siap pakai.
Bluetooth dirancang untuk mendukung aplikasi layanan data dan suara. Karakteristik dari teknologi Bluetooth dapat dilihat pada tabel.3.1
Tabel 3.2 Karakteristik Bluetooth Karakteristik Deskripsi
Physical Layer Frequency Hopping Spread Spectrum (FHSS) Frequency Band 2,4 – 2,4835 GHz
Kecepatan data 1 Mbps (raw)
Jangkauan Sekitar 10 meter dan dapat diperluas sampai 100 meter
Throughput ~ 720 kbps
Kelebihan Tanpa kabel,
Sinyal dapat menembus halangan, Biaya relatif murah,
Berdaya rendah, dan
Hardware yang relatif kecil.
Kekurangan Kemungkinan terjadinya interferensi dengan teknologi lain. Kecepatan data relatif rendah.
Bluetooth memungkinkan alat – alat ini berkomunikasi satu sama yang lain apabila berada pada jarak jangkauan. Bluetooth menggunakan komunikasi radio, sehingga komunikasi dapat dilakukan walaupun tidak dalam line of sight. Bluetooth terbagi menjadi 3 kelas, pembagian kelas ini berdasar pada besar daya yang dipakai dan kekuatan sinyal yang dihasilkan.
Tabel 3.3 Kelas – kelas Bluetooth
3.2.6 USB Gamepad
Untuk mengontrol mobile robot maka diperlukan suatu media yang dapat menentukan arah pergerakan robot, oleh sebab itu diperlukan Gamepad
Gamepad sebagai media input untuk melakukan pengontrolan terhadap arah pergerakan robot. Gamepad dikoneksikan ke komputer melalui port usb. Untuk
- mengetahui adanya inputan melalui gamepad, digunakan Microsoft Windows
API (application programming interface). API berfungsi sebagai jembatan antara driver hardware (dalam hal ini gamepad) dengan programmer. Sehingga
programmer hanya perlu mengetahui bagaimana cara untuk mengambil inputan yang akan diberikan oleh user melalui gamepad ke PC. Caranya adalah dengan mengakses file “winmm.dll” yang disebut juga Windows Multimedia API. Ada 3 variabel penting bagi gamepad yang akan diambil dari “winmm.dll” yaitu
variabel X, Y dan tombol.
(http://gpwiki.org/index.php/VB:Windows_API_Gamepad_Input)
Adapun fungsi tombol pada gamepad dibagi atas 2 yaitu pergerakan mobile robot dan pergerakan lengan robot:
1. Pergerakan mobile robot
• Tombol arah atas = untuk menggerakan mobile robot maju. • Tombol arah bawah = untuk menggerakan mobile robot mundur.
• Tombol arah kanan = untuk melakukan gerakan berputar ke arah kanan dengan cara roda kanan diam sedangkan roda kiri berputar maju.
• Tombol arah kiri = untuk melakukan gerakan berputar ke arah kiri dengan cara roda kiri diam sedangkan roda kanan berputar maju.
• Tombol 9 = untuk melakukan gerakan berputar di tempat ke arah kiri. • Tombol 10 = untuk melakukan gerakan berputar di tempat ke arah kanan.
2. Pergerakan lengan robot
• Tombol 1 = untuk menggerakan joint P1 berputar ke arah kanan. • Tombol 1 + L1 = untuk menggerakan joint P1 berputar ke arah kiri. • Tombol 2 = untuk menggerakan joint P2 ke arah atas.
• Tombol 2 + L1 = untuk menggerakan joint P2 ke arah bawah. • Tombol 3 = untuk menggerakan joint P3 ke arah atas.
• Tombol 3 + L1 = untuk menggerakan joint P3 ke arah bawah. • Tombol 4 = untuk menggerakan joint P4 berputar ke arah kanan. • Tombol 4 + L1 = untuk menggerakan joint P4 berputar ke arah kiri. • Tombol R1 = untuk menutup grip.
• Tombol R2 = untuk membuka grip.
3.2.7 Modul Wireless Camera 1/3” CMOS
Camera yang digunakan untuk melihat benda berupa camera wireless cmos dengan ukuran 1/3”.
Gambar 3.28 Modul wireless Camera
Camera ini di tempatkan dibawah mobile robot agar dapat melihat benda yang terletak dibawah mobile robot. Dengan specification :
Transmission Power 50 mW Modulation Mode FM
BandWidth 20 MHz Power Supply 8 Vdc
Consumption Current 80 & 120 mA
3.2.8 Perancangan Software
Setelah melakukan perancangan hardware, maka untuk menjalankan hardware tersebut diperlukan suatu program, program ini nantinya akan digunakan untuk mengendalikan pergerakan motor DC. Dengan menggunakan software codevision, yang selanjutnya setelah melalui kompilasi akan ditulis ke dalam mikrokontroller melalui writer. Penulisan ke dalam mikrokontroller ini menggunakan sebuah kabel serial yang dihubungkan kecomputer port paralel PC (DB 25).
-
Gambar 3.30 Lanjutan diagram alir pergerakan motor
Dibawah ini daftar reaksi yang akan dilakukan oleh robot apabila tombol pada gamepad ditekan ditekan:
• Jika tombol gamepad 1 ditekan maka motor lengan 1 akan bergerak kekanan. • Jika tombol gamepad L1 + 1 ditekan maka motor lengan 1 akan bergerak
kekiri.
• Jika tombol gamepad 2 ditekan maka motor lengan 2 akan bergerak ketas. • Jika tombol gamepad L1 + 2 ditekan maka motor lengan 2 akan bergerak
kebawah. If tombol joypad arah kiri
ditekan If tombol joypad arah kanan ditekan If tombol joypad arah atas ditekan If tombol joypad arah bawah ditekan If tombol joypad 9 ditekan If tombol joypad 10 ditekan Motor kanan dan kiri maju Motor kanan maju Motor kiri maju Motor kanan dan kiri mundur Motor kanan maju, motor kiri mundur Motor kiri maju, motor kanan mundur Motor stop bergerak Motor lengan stop bergerak If tombol arah joystick tidak ada yang ditekan If tombol joypad tidak ada yang ditekan tidak tidak tidak tidak tidak ya ya ya ya ya tidak ya ya ya tidak
• Jika tombol gamepad 3 ditekan maka motor lengan 3 akan bergerak keatas. • Jika tombol gamepad L1 + 3 ditekan maka motor lengan 3 akan bergerak
kebawah.
• Jika tombol gamepad 4 ditekan maka motor lengan 4 akan bergerak kekanan. • Jika tombol gamepad L1 + 4 ditekan maka motor lengan 4 akan bergerak
kekiri.
• Jika tombol gamepad R1 ditekan maka motor lengan 5 akan bergerak membuka.
• Jika tombol gamepad R2 ditekan maka motor lengan 5 akan bergerak menutup.
• Jika tombol gamepad Arah kiri ditekan maka motor kanan maju. • Jika tombol gamepad Arah Kanan ditekan maka motor kiri maju.
• Jika tombol gamepad Arah atas ditekan maka motor kanan dan kiri maju. • Jika tombol gamepad Arah bawah ditekan maka motor kanan dan kiri
mundur.
• Jika tombol gamepad 9 ditekan maka motor kanan maju dan motor kiri mundur.
• Jika tombol gamepad 10 ditekan maka motor kanan mundur dan motor kiri maju.
• Jika arah gamepad tidak ada yang ditekan maka motor stop bergerak. • Jika arah gamepad tidak ada yang ditekan maka motor stop bergerak.
Pada program ini akan terus menerus memeriksa apakah tombol ditekan atau tidak.