Getaran (Vibration)
Dalam kehidupan sehari-hari terdapat banyak benda yang bergetar.
Garpu tala,
Senar gitar yang sering anda mainkan,
Sound system,
Ingat juga ketika anda tertawa terpingkal-pingkal tubuh anda juga bergetar
Getaran (Vibration)
Getaran adalah gerakan bolak-balik dalam suatu interval waktu tertentu.
Getaran dan gelombang merupakan dua hal yang saling
berkaitan. Baik itu gelombang air laut, gelombang gempa bumi, gelombang suara yang merambat di udara; semuanya bersumber pada getaran. Dengan kata lain, getaran adalah penyebab
Getaran Bebas (Free Vibration)
Persamaan gerak secara umum :
)
(
t
p
ku
u
c
u
m
+
+
=
Kecepatan dan perpindahan saat t=0 :
0 0
,
(
0
)
)
0
(
u
u
u
u
=
=
Sehingga persamaan gerak dapat ditulis :
)
(
2
2 2t
p
k
u
u
u
n n ndimana
n n
cr
k
m
c
ω
ω
2
2
=
=
cr
c
c
=
ζ
dan
k c
n adalah frekuensi alami sudut tak teredam (rad/s), adalah faktor redaman
Getaran bebas system SDOF
Respon total :
)
(
)
(
)
(
t
u
t
u
t
u
=
p+
cDi dalam istilah matematika, penyelesaian umum dari persamaan diferensial terdiri dari penyelesaian sesungguhnya up(t) dan
penyelesaian komplemen/pelengkap uc(t). up(t) = forced motion related p(t)
uc(t) = natural motion P(t) m
u
K
I
Getaran bebas system SDOF
Untuk getaran bebas
→
P(t)=0:
0
=
+
+
c
u
ku
u
m
0
2
+
2=
+
u
u
u
n
n
ω
ζω
Solusi umum, untuk menyelesaikan persamaan diatas :
t
s
e
C
u
=
Maka….
Getaran bebas system SDOF
0
)
2
(
s
2
+
ζω
n
s
+
ω
n
2
C
e
s
t
=
Supaya dapat valid untuk semua nilai t , kita harus mengeset :
0
2
2
2
=
+
+
n
s
n
s
ζω
ω
Getaran bebas system SDOF
SDOF Tak Teredam
(Undamped)
Persamaan gerakan untuk sistem "Undamped SDOF" adalah
0
=
+
ku
u
m
u
+
2u
=
0
n
ω
ataudan persamaan karakteristik yang sesuai adalah
0
2 2
=
+
ns
ω
akar dari persamaan diatas adalah
1
-i
dimana
2 ,
1
=
±
i
n=
Sehingga penyelesaian umum :
t i t
ei
n n
e
C
C
u
=
1 ω+
2 − ωdengan memperkenalkan persamaan Euler
θ
θ
θ
cos
sin
i
e
±
i
=
±
kita dapat menulis ulang persamaan dalam bentuk fungsi trigonometri, yaitu
t
A
t
A
u
n
n
ω
ω
sin
cos
2
1
+
dimana A1 dan A2 adalah konstanta real, ditentukan dari kondisi awal perpindahan dan kecepatan,
jadi
t
u
t
u
u
n n nω
ω
ω
sin
cos
0 0⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
=
adalah respon getaran bebas d a r i s i s t e m " u n d a m p e d SDOF".
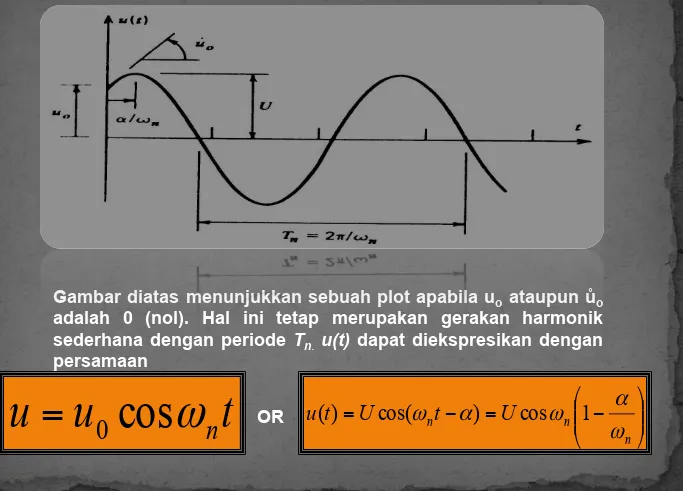
Pertama-tama dengan mempertimbangkan kasus dari sebuah sistem yang menggantikan dari posisinya yang seimbang dengan jumlah uo dan dibebaskan. Kemudian ů(0) = 0 , jadi
Dapat dilihat bahwa respon merupakan gerakan harmonik sederhana dengan amplitudo uo, dan periode dari "undamped natural"
t
u
u
n
ω
cos
0=
(s)
2
n n
T
ω
π
=
dan sebuah frekuensi dari "undamped natural"
(Hz)
2
1
π
ω
nn n
T
Gambar diatas menunjukkan sebuah plot apabila uo ataupun ů
o
adalah 0 (nol). Hal ini tetap merupakan gerakan harmonik sederhana dengan periode Tn. u(t) dapat diekspresikan dengan persamaan
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
=
−
=
n n
n
t
U
U
t
u
ω
α
ω
α
ω
)
cos
1
cos(
)
(
t
u
u
n
ω
cos
0
F(t)
W8x24
200 lb/ft
15 ft
Model Struktur :
E = 30.106 psi
I = 82,5 in4
W = 200 x 25 = 5000 lb
g = 386 in/dt2
Contoh
F(t)
W8x24
200 lb/ft
15 ft
F(t)
Model SDOF
Model Matematis
F(t)
m
K
y
FBD
f
sm
F(t)
Penyelesaian :
( )
t
F
fs
I
+
=
fs m F(t)I
( )
t
F
y
k
y
m
.
+
.
=
( )
(
)
(
)
sps f dt rad m k in dt lb g W m in lb L I E K n n 46 . 4 5000 386 . 185 , 10 2 1 2 / 786 . 0 5000 386 . 185 , 10 / . 95 . 12 386 5000 / 185 , 10 12 . 15 5 , 82 . 2 10 . 30 . 12 2 12 2 3 6 3 = = = = = = = = = = = =π
π
ω
ω
( )
t
F
y
y
+
10
.
185
=
95
.
t
u
t
u
t
u
n n nω
ω
ω
sin
cos
)
(
0 0⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
=
t
u
t
u
t
u
sin
0
.
786
786
.
0
786
.
0
cos
)
(
0 0⎟
⎠
⎞
⎜
⎝
⎛
+
=
Latihan
Jika: Simpangan awal
Kecepatan awal
Gaya luar F(t)
Gambarkan Respons Struktur!!
( )
0
=
0
,
001
ft
y
( )
0
=
0
,
1
ft/dt
0
=
+
+
c
u
ku
u
m
u
+
2
u
+
2u
=
0
n
n
ω
ζω
Persamaan gerakan untuk sistem "Undamped SDOF" adalah
atau
dan persamaan karakteristik yang sesuai adalah
0
2
2
2
=
+
+
n
s
n
s
ζω
ω
dimana akar-akarnya , s1 dan s2 diberikan oleh
1
2 2
,
1
=
−
ζω
n±
ω
nζ
−
Besarnya faktor "damping" ( ζ ) , dapat digunakan untuk membedakan 3 kasus, yaitu:
Ø underdamped (0 < ζ < 1)
Ø critically damped ( ζ = 1 )
Kasus
Underdamped
( 0 <
ζ
< 1)
1
2 2
,
1
=
−
ζω
n±
ω
nζ
−
s
( 0 <
ζ
< 1)
d
n
i
s
=
−
ζω
±
ω
2 , 1
Lebih mudah bila menulis persamaan diatas dalam bentuk
dimana ωd adalah frekuensi alami " damped circular " yang diberikan oleh
ζ
ω
ω
d=
n1
−
yang sesuai dengan periode damped , Td , yang diberikan oleh
d d
T
ω
π
2
Dengan bantuan dari formula Euler, penyelesaian umum, u (t), dapat ditulis dalam bentuk
)
sin
cos
(
)
(
t
e
A
1t
A
2t
u
d d t nω
ω
ζω+
=
−dan juga, uo dan ůo digunakan untuk mengevaluasi A
1 dan A2 ,
dengan hasil:
⎥
⎦
⎤
⎢
⎣
⎡
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
=
−cos
sin
)
)
(
t
e
u
0t
u
0u
0t
u
d d n d t nω
ω
ζω
ω
ζω
Atau dapat ditulis dalam bentuk
)
cos(
)
(
t
=
Ue
−ζωω
t
−
α
u
d t
Walaupun nilai dari ζ mempunyai efek pada frekuensi , ωd , efek yang paling berat dari damping adalah pada angka pada saat gerakan menyusut, yaitu pada waktu e-ζωdt.
Ø
Kasus critically damped (
ζ
= 1 )
Ketika ζ=1 maka persamaan
1
2 2
,
1
=
−
ζω
n±
ω
nζ
−
s
menjadi
n
s
=
−
ζω
2 , 1
maka respon dari sistem redaman kritis adalah:
Solusinya menjadi:t n
e
t
C
C
t
u
(
)
=
(
+
)
−ζω2 1 t o n o o n
e
t
u
u
u
t
Eksperimen Penentuan dari
Frekuensi Alami Dasar dan
Faktor
Damping
dari sebuah
sistem SDOF
Faktor damping , ζ , umumnya diukur, dan bila diinginkan, nilai efektif dari c dapat dihitung dari persamaan
Frekuensi alami undamped dari sebuah sistem SDOF sederhana dapat ditentukan dari pengukuran statis.
Main Menu
cr
Contoh
Tentukan frekuensi alami dari sebuah sistem pegas sederhana dengan menggunakan pengukuran statis defleksi.
Penyelesaian :
k
L
ok
w
u
stfs=ku
stωn2 = k/m
keseimbangan berat dari massa yang tergantung pada pegas ditunjukkan pada
∑
=
↓
+
F
0
atau
0
=
−
f
sW
dari persamaan gaya yang menyebabkan perpanjangan pada pegas
st s
ku
f
=
2 1
3
4
persamaan 3 dan 4 digabungkan mendapat
st s
mg
ku
f
=
=
5k Lo k
w
ust
fs=kust
jadi, dari persamaan 1 dan 5
st n
u
g
=
2
ω
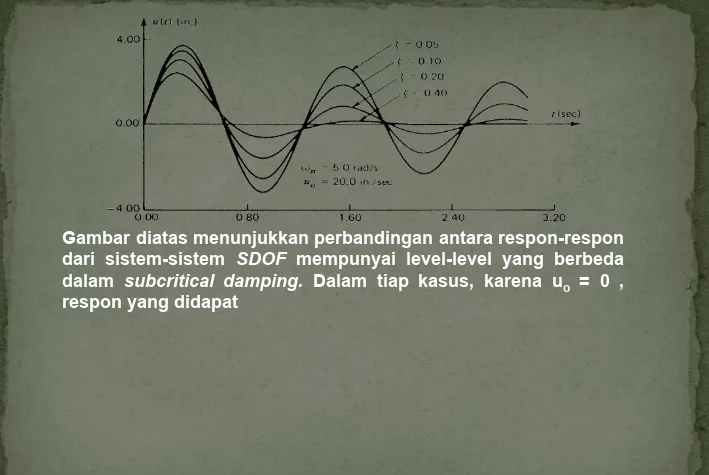
6apabila the damping dalam sistem kecil ( ζ < 0.2 ), persamaan
menunjukkan bahwa ωd kurang lebih sama dengan ωn. Contoh selanjutnya menunjukkan bagaimana sebuah eksperimen getaran bebas dapat digunakan untuk menentukan frekuensi alami dari sebuah sistem SDOF.
1
2
−
Contoh
Frekuensi natural dari balok kantilever dengan massa
lumped (terpusat) bergerak dinamis. Massa bergerak
dengan amplitudo A = 1 in kemudian dilepaskan. Gerakan
yang terjadi ditunjukkan gambar di bawah yang
Penyelesaian :
Pada titik a, beban telah bergerak 1¼ putaran
Hz
putaran
125
.
3
4
.
0
25
.
1
=
≈
s
f
nrad/s
6
.
19
)
125
.
3
)(
28
.
6
(
2
=
=
=
n
n
π
f
ω
s
f
T
n
n
0
.
32
Terdapat dua metode yang hampir sama untuk m e n e n t u k a n t h e d a m p i n g f a c t o r, ζ, d e n g a n menggunakan rekaman melemahnya getaran bebas dari sebuah sistem SDOF : metoda logarithmic decrement dan metoda setengah amplitudo. Keduanya berdasarkan pada persamaan,
)
cos(
)
(
t
=
Ue
−ζωω
t
−
α
u
d t
Dalam metoda logarithmic decrement , amplitudo gerakan, uP, pada per mulaan dari putaran dan amplitudonya, uQ, pada akhir putaran , dihitung.
Pada akhir dari periode (misal satu putaran ) nilai dari cos (ωdt - α ) kembali pada nilai yang didapat pada permulaan dari putaran.
Karena itu, didapat persamaan
d nT
Q P
e
u
u
ζω=
the logarithmic decrement δ dijelaskan sebagai berikut :
d n Q
P
T
u
u
ζω
δ
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
dimana Td adalah periode natural damped , dijelaskan sebagai berikut :
2
1
2
2
ζ
ω
π
ω
π
−
=
=
n d dT
jadi, kita mendapatkan
2
1
2
ζ
πζ
ζω
δ
−
=
=
nT
dUntuk damping kecil ( ζ < 0.2 ) , perkiraannya :
πζ
δ
=
2
dapat diterima, memungkinkan faktor damping untuk
didapat dari persamaan :
Prosedur yang sama juga diterapkan pada metoda setengah amplitudo, dimana hasilnya merupakan
perhitungan yang sederhana untuk faktor damping.
Metoda setengah amplitudo ber dasar kan pada
amplitudo dari envelope curve (kurva envelope).
t
n
Ue
t
u
ˆ
(
)
=
−
ζω
2
ˆ
ˆ
PR
u
u
=
Titik-titik tersebut adalah N periode damped yang
terpisah, dimana N tidak harus sebuah bilangan bulat.
Kemudian,
2
ˆ
ˆ
=
=
nNT
dR
P
e
u
u
ζω
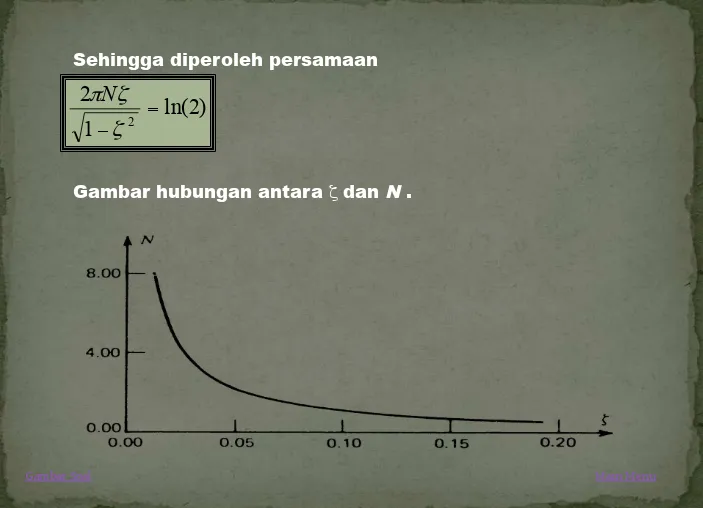
Sehingga diperoleh persamaan
)
2
ln(
1
2
2
=
−
ζ
ζ
π
N
Gambar hubungan antara ζ dan N .
Main Menu
Tetapi, untuk nilai damping yang kecil, ζ2 << 1,
menghasilkan:
)
2
ln(
2
π
N
ζ
=
atau
N
11
.
0
=
ζ
Contoh
Sebuah sistem bergetar terdiri dari berat W = 10 lb dan pegas
dengan kekakuan K = 20 lb/in. Akibat redaman viskous (liat)
sehingga terjadi amplitudo puncak 1,0 dan 0,85.
a). Frekuensi natural tak teredam (ωn)
b). Pengurangan logaritmis c). Rasio redaman(ζ)
d). Koefisien redaman(c)
e). Frekuensi natural redaman (ωn)
Penyelesaian :
a). Frekuensi natural tak teredam (ωn)
m K n =
ω
2 in/sec 386 lb 10 = = g W mK = 20 lb/in ,
sec rad 78 , 27 386 10 20 = = n
ω 4,42 sps
2 78 , 27
2 = =
= π π ω f atau
b). Pengurangan logaritmis
2 1
ln
y
y
=
δ
y1 = 1,00y2 = 0,85
165
,
0
85
,
0
0
,
1
ln
=
=
δ
c). Rasio redaman(ζ)
π
δ
ζ
2
=
0
,
026
d). Koefisien redaman(c)
cr
c
c
=
ζ
c
=
2
k
⋅
m
=
2
10
⋅
20
386
cr
cr
c
c
=
ζ
⋅
(
)
⎟
⎠
⎞
⎜
⎝
⎛
⋅
=
386
20
10
2
026
,
0
in
dt
lb
⋅
=
0
,
037
e). Frekuensi natural redaman (ωD)
,
1
ζ
2ω
ω
D=
−
rad/det
77
.
27
)
026
.
0
(
1
78
.
27
−
2=
=
D
Contoh
Penyelesaian :
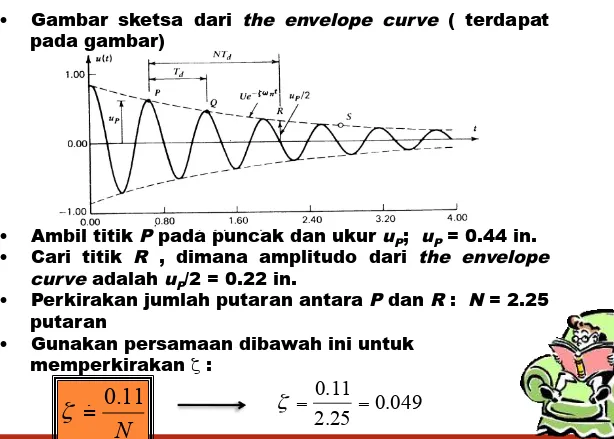
049
.
0
25
.
2
11
.
0
=
=
ζ
• Gambar sketsa dari the envelope curve ( terdapat pada gambar)
• Ambil titik P pada puncak dan ukur uP; uP = 0.44 in. • Cari titik R , dimana amplitudo dari the envelope
curve adalah uP/2 = 0.22 in.
• Perkirakan jumlah putaran antara P dan R : N = 2.25 putaran
• Gunakan persamaan dibawah ini untuk memperkirakan ζ :
N
11
.
0
=
Level dari damping dari sebuah sistem juga tercer min dalam jumlah yang disebut time constant, τ.
Yang ar tinya waktu yang diper lukan bagi amplitudo untuk berkurang dengan faktor 1 / e. Dengan perlakuan yang sama ketika formula setengah amplitudo didapat, persamaan untuk time constant bisa didapat.
atau,
e
e
n=
τ
ζω
dengan mengeliminasi logaritma pada kedua sisi, kita dapatkan
1
=
τ
ζω
n
kemudian, time constant , τ, diberikan sebagai :
πζ
ζω
τ
2
1
nn
T
=
=
Getaran Bebas dari sebuah sistem
SDOF dengan
Coloumb
Damping
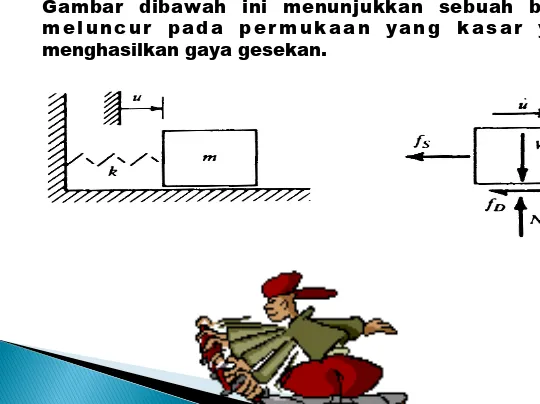
Gambar dibawah ini menunjukkan sebuah benda m e l u n c u r p a d a p e r m u k a a n y a n g k a s a r y a n g menghasilkan gaya gesekan.
mg
N
f
D=
µ
k=
µ
kdimana
µk adalah koefisien gesekan kinetik, atau koefisien gesekan luncur.
Gaya gesek selalu berlawanan dengan gerakan, yakni ber lawanan gaya yaitu u. Dengan m e n g g u n a k a n h u k u m N e w t o n I I , k i t a mendapatkan
u
m
f
f
s−
D=
−
tapi
fs = ku dan
)
sgn(
u
mg
f
D
=
µ
k
Gerakan hasil di plot dalam gambar diatas. Catatan pada gambar, bahwa sistem coulomb-damped berlaku seperti sistem undamped SDOF yang posisi seimbangnya berubah di akhir pada setiap setengah putaran.