TE141345 Dasar Sistem Pengaturan
Model Matematik
Objektif:
Penyajian Model Matematik
Model Sistem Mekanik
Model Sistem Elektrik
Model Sistem Mekatronika
Model Matematik Sistem Fisik
Penyajian Model Matematik
• Dalam bentuk Persamaan Matematik
Pers.Differensial, untuk sistem kontinyu Pers.Beda, untuk sistem diskrit
• Dalam bentuk Fungsi Alih (Transfer Function)
TF dalam fungsi s, untuk sistem kontinyu TF dalam fungsi z, untuk sistem diskrit
• Dalam bentuk Persamaan State
State kontinyu State diskrit
• Dalam bentuk Polinomial
Polinomial dalam s, untuk sistem kontinyu Polinomial dalam q, untuk sistem diskrit
• Dalam bentuk Diagram
Model Matematik dalam bentuk PD
Hubungan Input-Output sistem dapat dituliskan sebagai:
f( , ) = weighting function
Atau dalam bentuk PD dapat pula ditulis sebagai berikut (*):
Model Matematik dalam bentuk TF
Transfer Function: hubungan Input-Output sistem yang berasal dari TL
bentuk PD dengan asumsi semua kondisi awal=0.
TL dari persamaan di atas (*) dengan semua kondisi awal=0, menjadi:
Model Matematik Sistem Mekanik
Pada sistem mekanik untuk mencari persamaan dinamik sistem banyak menggunakan Hukum Newton.
Gerakan Translasi: ΣF = m a Gerakan Rotasi: Στ = J α
di mana :
F = gaya yang bekerja pada massa m m = massa benda
a = percepatan benda
Sistem Mekanik- Rodagigi
Rodagigi n1 diputar oleh torsi Τ1, menghasilkan torsi Τ2 pada rodagigi n2:
di mana:
r = jari-jari roda
ω = kecepatan sudut roda α = percepatan sudut roda
Τ = torsi
Sistem Mekanik – Pengungkit
Suatu gaya F1 diberikan pada batang yang mempunyai panjang l, akan diteruskan oleh batang m sebesar F2 :
Contoh: Sistem Mekanik
Sistem mekanik seperti gambar berikut: di mana:
f(t) = gaya yang bekerja pada massa m
K = konstanta pegas
B = konstanta daspot (peredam viscos) y(t) = simpangan pegas
• Carilah model dinamik sistem mekanik tersebut dengan y(t) sebagai output dan f(t) sebagai input.
• Carilah transfer function sistem mekanik tersebut dengan y(t) sebagai output dan f(t) sebagai input.
m f(t)
y(t) B
Model Matematik Sistem Elektrik
Pada sistem elektrik untuk mencari persamaan dinamik sistem banyak menggunakan Hukum-hukum pada rangkaian listrik.
persamaan tegangan Kirchoff, dan arus Mesh
0
;
=
=
∑
∑
) ( ) (t Ri t vR = R =
∫
i t dt C t vC ( ) 1 C( )R
iRv
RC
iCv
CL
v
L iL ) ( ) (s RI s VR = R ( ) 1 I (s) Cs s VC = C dt t di L t vL( ) = L ( ) ) ( ) (s LsI s VL = LKomponen Pasif: R-L-C
Resistor: Kapasitor: Induktor:
Contoh: Sistem Elektrik R-L-C
vi v o R C LSuatu Filter yang terdiri dari komponen RLC. Tegangan input
vi(t) dan tegangan output vo(t).
)
(
)
(
1
1
2
2
v
t
n
n
t
v
=
)
(
)
(
s
n
2V
s
V
=
n
1n
2i
1i
2v
1v
2Komponen Pasif: Transformator
Ideal
Model Dinamik
Transformator tidak ideal
• Ada pengaruh induktansi gandeng
(M)
• Titik menandakan awal lilitan • v1 = tegangan input
• v2 = tegangan output
• i1 = arus kumparan primer • i2 = arus kumparan sekunder • n1 = jumlah lilitan kumparan 1 • n2 = jumlah lilitan kumparan 2
M
n
1n
2i
1i
20
)
(
)
(
)
(
1 1 2 1−
−
=
dt
t
di
M
dt
t
di
L
t
v
Trafo tidak ideal (sisi primer)
Contoh: Sistem Elektrik - Trafo
Rangkaian input transformator (trafo) dihubungkan seri oleh kapasitor C, dan rangkaian output diberi beban R1 dan R2 secara seri-paralel.
• Carilah transfer function sistem elektrik tersebut
M
Komponen Aktif: Operational Amplifier
Sifat–sifat Operasional Amplifier:
1. Gain sangat besar K= 105 sampai dengan 106
kali.
2. Mempunyai dua masukan yaitu masukan positif
(v1) dan masukan negatif (v2).
3. Mempunyai impedansi masukan yang sangat
besar sehingga arus input pada masukan positif atau masukan negatif kecil sekali ≈ 0
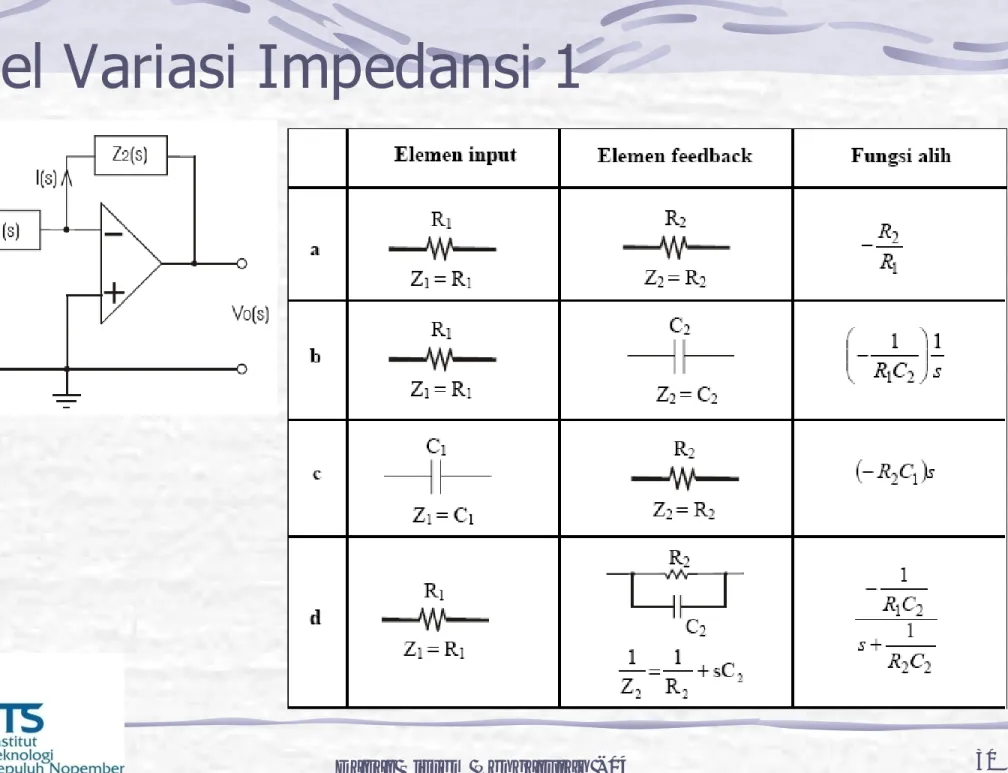
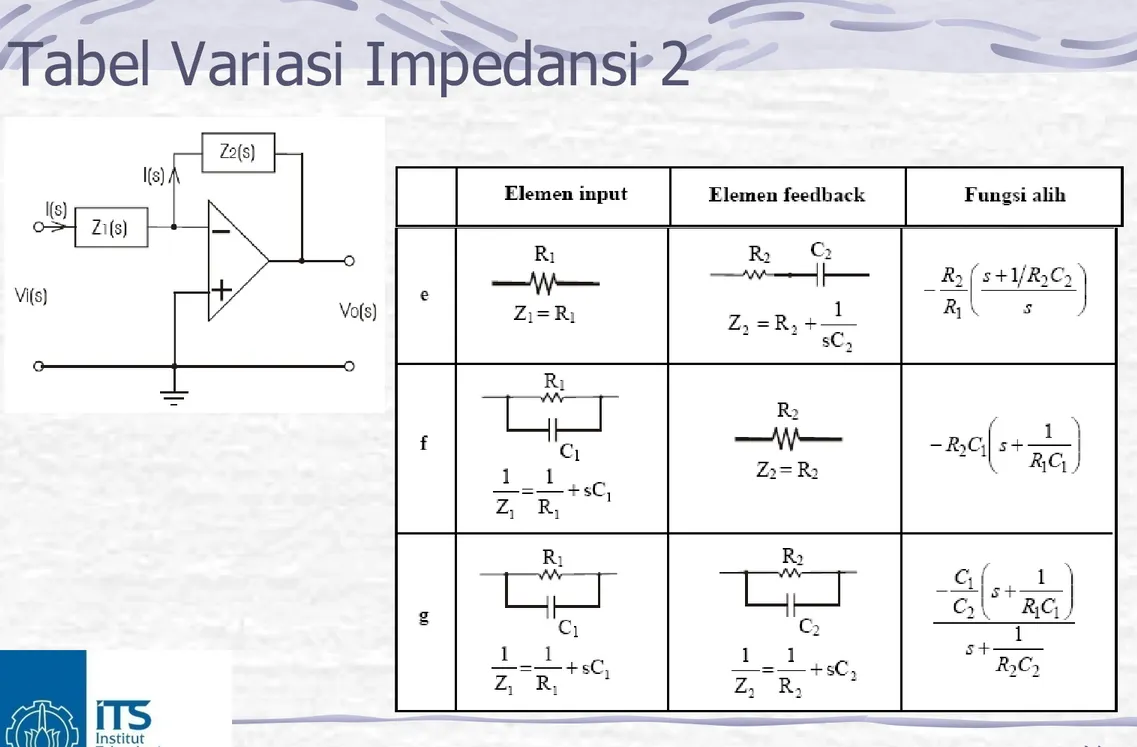
Contoh: Operational Amplifier
Rangkaian Operational Amplifier dikonfigurasi dengan rangkaian pasif R-C untuk menjadi filter
Model Sistem Mekatronik
Untuk mencari persamaan dinamik sistem berikut, digunakan persamaan-persamaan sistem elektrik pada motor dan
selenoid (plunger).
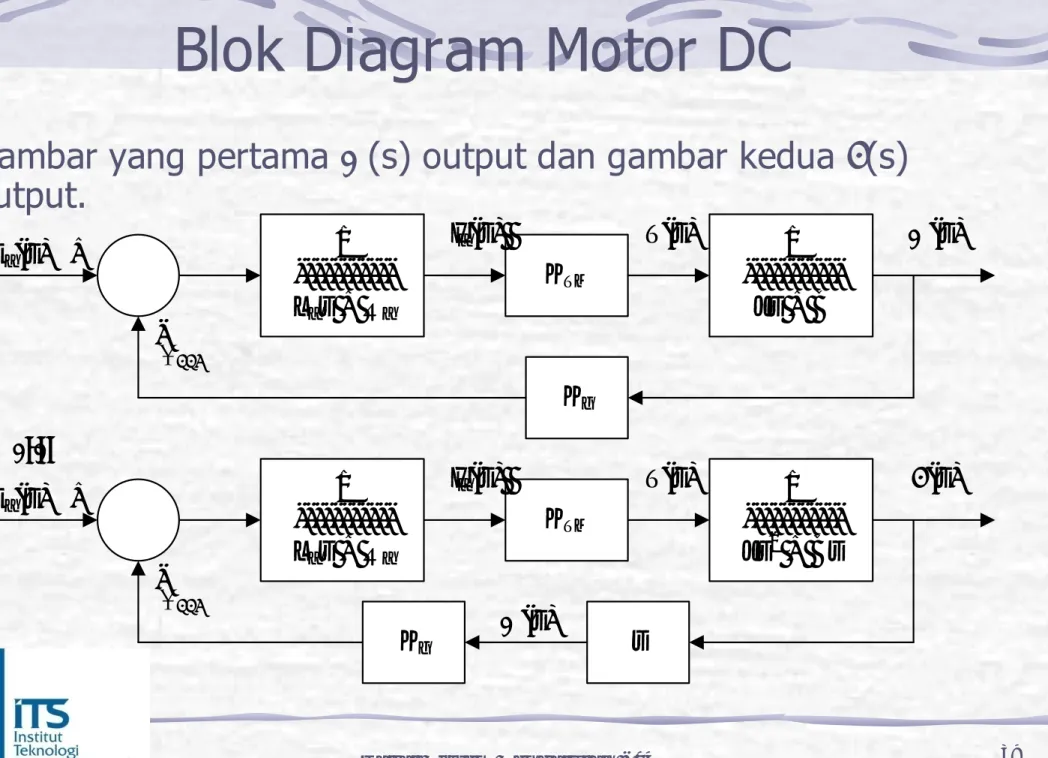
Blok Diagram Motor DC
Penyederhanaan Blok Diagram Motor DC
E
a(s) input dan Ω(s) output:
Motor AC-Servo
Motor AC-Servo pada prinsipnya dapat berupa sebuah motor induksi dengan 2-kutub/dua-fasa
Fasa ref.
ec
Fasa kontrol (a)
J
τ θ
b
Arsitektur Motor AC-Servo
Salah satu dari kumparan medan sebagai lilitan referensi (fase
reference) dan kumparan medan yang lainnya sebagai lilitan
kontrol (fase control) dengan tegangan AC yang berbeda 90° listrik terhadap tegangan referensi.
Persamaan Torsi Motor AC-servo
Torsi τ yang dibangkitkan merupakan fungsi dari kecepatan sudut poros motor dan tegangan kontrol EC , adalah:
di mana:
Kn dan KC konstanta positif.
Kesetimbangan torsi untuk motor servo dua-fasa adalah: di mana:
J = momen inersia motor dan beban pada poros motor
b = koefisien gesekan viskos motor dan beban poros motor
Fungsi Alih Motor AC-servo
Tegangan kontrol EC adalah input dan perpindahan poros
motor adalah output, maka fungsi alih (transfer-function) sistem ini diberikan:
di mana :
Km = KC /( b + Kn) = konstanta penguatan motor
Tm = J /( b + Kn) = konstanta waktu motor
Diagram Kotak Motor AC-servo
Fungsi alih didasarkan pada anggapan bahwa motor servo linier. Namun dalam praktek, motor servo tidak benar-benar linier. Karena kurva torsi-kecepatan tidak benar-benar sejajar dan berjarak sama, maka harga Kn tidak konstan. Sehingga harga Km dan Tm juga tidak konstan, harga-harga tersebut berubah terhadap tegangan kontrol.
Diagram blok dari motor Servo dua-fasa di atas sebagai berikut :
Km
Model Matematik Selenoid (Plungger)
Suatu kumparan yang dililitkan pada media isolator yang mempunyai inti besi yang bebas bergerak. Tegangan vp(t) sebagai input dan x(t) sebagai output. Kp = konstanta plungger ip = arus yang mengalir pada plungger.
Contoh: Sistem Elektromekanik
Consider the temperature control system shown in figure. It is assume that the heat q pumped into the chamber is proportional to the valve opening x and the temperatur y inside the chamber related to q by the differential equation dy/dt
= -cy + kcq. Compute transfer function of each blok.