BAB III
PERANCANGAN ALAT
Pada bab ini akan dijelaskan perancangan alat yang terdiri dari gambaran sistem
kerja alat, perancangan perangkat keras dan perancangan perangkat lunak. Perancangan
dimulai dari uraian mengenai gambaran sistem kerja alat yaitu penjelasan tentang
bagaimana alat ini bekerja. Kemudian dilanjutkan uraian mengenai perancangan
perangkat keras dan yang terakhir uraian mengenai perancangan perangkat lunak.
3.1. Gambaran Sistem
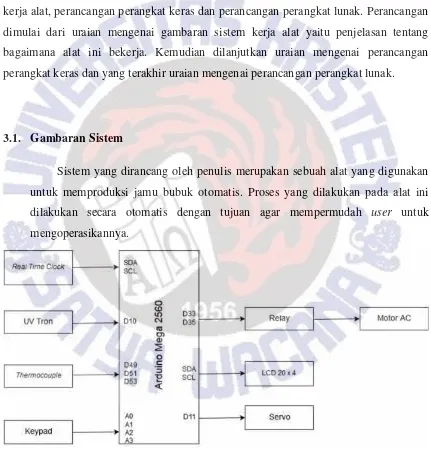
Sistem yang dirancang oleh penulis merupakan sebuah alat yang digunakan
untuk memproduksi jamu bubuk otomatis. Proses yang dilakukan pada alat ini
dilakukan secara otomatis dengan tujuan agar mempermudah user untuk mengoperasikannya.
3.2. Gambaran Cara Kerja Alat
Ketika terhubung dengan catu daya AC 220 V pada saklar utama dalam
kondisi ON, maka alat ini akan bekerja. Jika kondisi ini sudah terpenuhi makauser bisa memasukkan rempah-rempah jamu jahe ke dalam kuali terlebih dahulu.
Setelah usersudah memasukkan rempah-rempah jamu jahe ke dalam kuali, maka LCD akan menampilkan lama proses memasak yang tersedia.Userdapat memilih untuk melakukan berapa lama proses memasak jamu jahe, yaitu proses memasak
selama 1 jam, 2 jam, 3 jam. Ketika user sudah memilih berapa lama proses memasak jahe tersebut, maka servo akan membuka keran gas sebesar 20o selama
lima detik, dan Arduino akan mengaktifkan pematik api selama lima detik. UV
Tron mendeteksi adanya api atau tidak, apabila tidak mendeteksi adanya api, servo
akan terus membuka keran gas sebesar 20oselama lima detik dan pematik api akan
aktif selama lima detik, setelah itu servo akan menutup kembali keran gas selama
5 detik dan pemantik api tidak aktif selama lima detik, dan begitu seterusnya.
Apabila UV Tron mendeteksi adanya api, maka servo akan membuka keran gas
sesuai yang sudah ditentukan, yaitu untuk lama proses memasak 1 jam, servo akan
membuka dari 30o, 60o, 90o, lama proses memasak 2 jam, servo akan membuka dari
30o, 60o, 80o, lama proses memasak 3 jam, servo akan membuka dari 30o, 60o, 70o.
Setelah kondisi semua sudah terpenuhi,yaitu UV Tron sudah mendeteksi adanya
api, servo sudah pada posisi terbuka 90o apabila memilih proses memasak 1 jam,
80o apabila memilih proses memasak 2 jam, atau 70o apabila memilih proses
memasak 3 jam, maka relay akan mengaktifkan Motor AC, dan pengaduk akan
bergerak. LCD akan menampilkan waktu dan tanggal pada saat itu, waktu mundur
proses memasak jahe, seberapa besar derajat servo terbuka, dan juga berapa derajat
suhu saat proses berlangsung. Setelah proses memasak jamu sudah selesai maka
alarm akan berbunyi menandakan semua proses sudah selesai, dan LCD akan
3.3. Perancangan Perangkat Keras
Pada bagian ini akan dijelaskan mengenai perancangan perangkat keras yang
dirancang oleh penulis. Perancangan perangkat keras yang akan dijelaskan meliputi
perancangan mekanik dan perancangan elektronika dari keseluruhan sistem yang
dirancang.
3.3.1. Perancangan Perangkat Keras Mekanik
Perangkat keras mekanik adalah bentuk fisik dari alat yang berfungsi
untuk menopang komponen-komponen yang digunakan dalam perancangan
ini, sehingga dapat memenuhi kenerja dari alat yang dirancang.
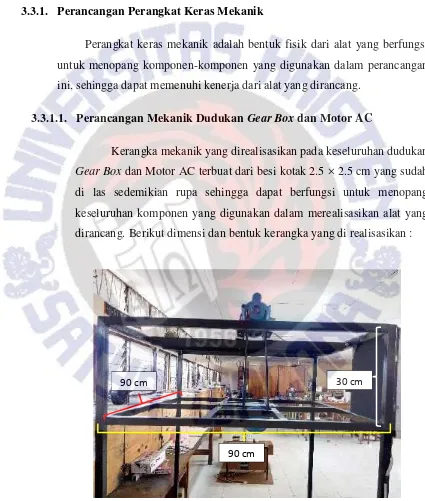
3.3.1.1. Perancangan Mekanik DudukanGear Boxdan Motor AC
Kerangka mekanik yang direalisasikan pada keseluruhan dudukan
Gear Boxdan Motor AC terbuat dari besi kotak 2.5 × 2.5 cm yang sudah di las sedemikian rupa sehingga dapat berfungsi untuk menopang
keseluruhan komponen yang digunakan dalam merealisasikan alat yang
dirancang. Berikut dimensi dan bentuk kerangka yang di realisasikan :
Gambar 3.2.Mekanik Keseluruhan Dudukan Motor AC danGear Box
Pemilihan bahan sebagai kerangka alat menggunakan besi 2.5x2.5
cm bertujuan agar alat yang direalisasikan dapat menopang berat beban 90 cm
dariGear Boxdan Motor AC. Seperti yang ditunjukkan pada Gambar 3.1., bahwaGear Boxdan Motor AC terdapat bagian penting untuk menunjang kinerja dari alat.
Berikut adalah penjelasan dari bagian alat tersebut :
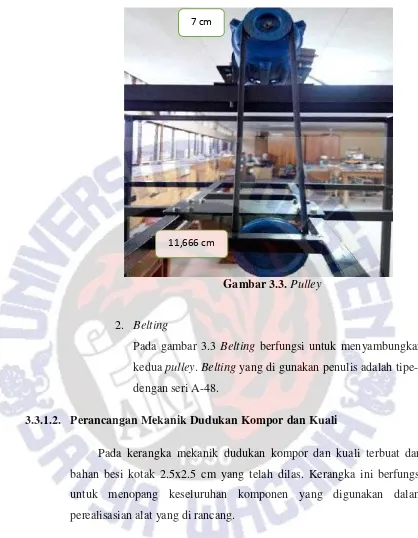
1. Pulley
Pulley adalah bagian yang berfungsi untuk menggerakkan Gear Box dari Motor AC dan juga memperlambat putaran yang keluar dari Motor AC ke Gear Box. Perhitungan menggunakanPulleytersebut sebagai berikut :
Rasio = D2 =pulleypada inputgear box
Gambar 3.3.Pulley
2. Belting
Pada gambar 3.3 Belting berfungsi untuk menyambungkan keduapulley.Belting yang di gunakan penulis adalah tipe-a dengan seri A-48.
3.3.1.2. Perancangan Mekanik Dudukan Kompor dan Kuali
Pada kerangka mekanik dudukan kompor dan kuali terbuat dari
bahan besi kotak 2.5x2.5 cm yang telah dilas. Kerangka ini berfungsi
untuk menopang keseluruhan komponen yang digunakan dalam
perealisasian alat yang di rancang.
Berikut adalah dimensi dan bentuk kerangka yang di realisasikan : 7 cm
Gambar 3.4.Mekanik Keseluruhan Dudukan Kompor dan Kuali
Seperti yang di tunjukkan pada Gambar bahwa kerangka dudukan
kompor dan kuali terdiri dari beberapa bagian penting untuk menunjang
kinerja dari alat.
Berikut adalah penjelasan dari bagian-bagian alat untuk otomatisasi
buka tutup keran gas, pengecekan adanya api atau tidak, dan suhu pada
kuali.
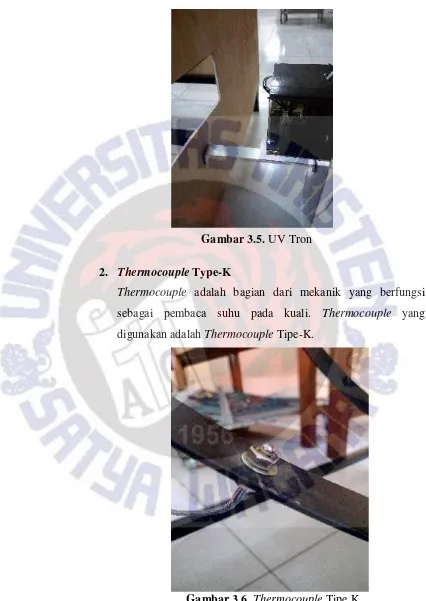
1. UV Tron
UV Tron adalah bagian yang berfungsi untuk mengecek adanya
api atau tidak. Tegangan input yang diterima oleh UV Tron
sebesar 12 volt.
90 cm
Gambar 3.5.UV Tron
2. ThermocoupleType-K
Thermocouple adalah bagian dari mekanik yang berfungsi sebagai pembaca suhu pada kuali. Thermocouple yang digunakan adalahThermocoupleTipe-K.
3. Servo
Servo adalah bagian dari mekanik yang digunakan untuk
membuka dan menutup keran gas.
Gambar 3.7.Servo
4. Pemantik Api
Pemantik api adalah bagian dari mekanik yang digunakan untuk
menyalakan kompor. Pemantik api yang digunakan dalam
skripsi ini menggunakan baterai kotak 9 V sebagai sumber
tegangan. Pemantik ini akan aktif ketikarelaydiaktifkan.
3.3.2. Perancangan Perangkat Keras Elektronik
Perangkat Keras Elektronik merupakan beberapa rangkaian elektronika
yang digunakan dalam sistem yang dirancang. Pada bagian ini akan membahas
tentang mikrokontroler Arduino Mega sebagai pengendali utama,
Thermocouple, UV Tron, Servo, Pemantik api.
3.3.2.1. Pengendali Utama
Pengendali utama pada suatu sistem kendali memiliki peran yang
sangat penting. Hal ini dikarenakan pengendali utama dapat
mengendalikan semua masukan dan keluaran dari suatu plant maupun
sensor yang ada pada suatu sistem. Oleh karena itu digunakan sebuah
pengendali utama pada skripsi ini untuk mengolah data yang diperlukan
dan mengambil keputusan untuk melakukan sesuatu pada tahap
selanjutnya dalam alat ini.
Pada skripsi ini pengendali utama yang digunakan adalah sebuah
mikrokontroler. Mikrokontroler ini dapat menerima data dari sensor
kemudian akan memprosesnya dan mengkonversikan data tersebut
menjadi satuan yang diinginkan. Mikrokontroler yang digunakan adalah
mikrokontroler yang termasuk dalam keluarga ATMega buatan Atmel
Corporation, yaitu ATMega 2560 yang diprogram dengan program
Arduino. Pemilihan ATMega 2560 berbasis Arduino sebagai pengendali
utama karena ATMega 2560 memiliki input dan output yang banyak, serta
memiliki banyak fasilitas yang relative lebih mudah dipelajari.
Pada mikrokontroler ini digunakan untuk mendapatkan data yang
terukur pada sensor suhu yang terukur oleh sensor suhu Thermocouple Type K, serta digunakan untuk mendapatkan data yang terukur pada
sensor UV Tron. Mikrokontroler ini juga bertugas untuk menghidupkan
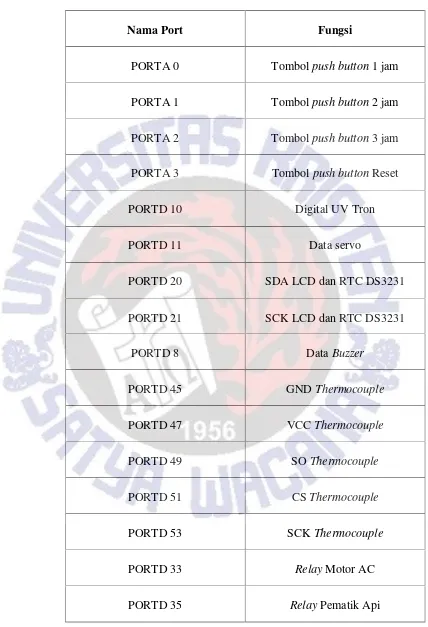
Tabel 3.1.Konfigurasi Pin ATMega 2560 Pada Bagian Pengendali Utama
Nama Port Fungsi
PORTA 0 Tombolpush button1 jam
PORTA 1 Tombolpush button2 jam
PORTA 2 Tombolpush button3 jam
PORTA 3 Tombolpush buttonReset
PORTD 10 Digital UV Tron
PORTD 11 Data servo
PORTD 20 SDA LCD dan RTC DS3231
PORTD 21 SCK LCD dan RTC DS3231
PORTD 8 DataBuzzer
PORTD 45 GNDThermocouple
PORTD 47 VCCThermocouple
PORTD 49 SOThermocouple
PORTD 51 CSThermocouple
PORTD 53 SCKThermocouple
PORTD 33 RelayMotor AC
Skripsi yang dirancang dan direalisasikan ini dilengkapi dengan
programuser interface. Programuser interfaceyang digunakan berfungsi untuk menampilkan status apakah alat dapat bekerja atau tidak, serta untuk
menampilkan waktu mundur lama pemasakan, berapa derajat servo
terbuka, suhu yang terukur oleh suhu Thermocouple, sertareal timedari RTC. Hal ini dirancang dengan tujuan untuk mempermudah user dalam penggunaan supayausermengetahui apakah alat sudah selesai atau belum pada saat melakukan pemasakan. Untuk menampilkan user interface digunakan sebuah LCD character 20 x 4 yang terhubung langsung ke
mikrokontroler, selain itu digunakan tombol push buttonmemulai proses memasak.
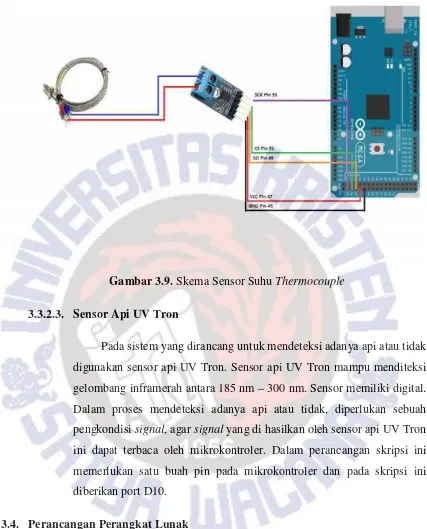
3.3.2.2. Sensor SuhuThermocouple Type-K
Pada sistem yang dirancang untuk pengukuran suhu digunakan
Thermocoupletype-k. Sensor suhuThermocoupleini memiliki jangkauan pengukuran 0oC sampai dengan 1200oC. Pada prinsipnya sensor suhu
Thermocouple digunakan untuk mengubah perbedaan suhu dalam benda menjadi perubahan tegangan listrik (voltase). Dalam perancangan skripsi
ini dibutuhkan sebuah pengkondisi sinyal agar sensor suhuThermocouple dapat diolah oleh mikrokontroler. Pengkondisi sinyal yang digunakan
adalah modul MAX6675. Modul MAX6675 dibentuk dari kompensasi
cold-junction yang outputnya didigitalisasi dari sinyal yang dihasilkan oleh Thermocouple type-k. Data output memiliki resolusi 12 bit dan mendukung komunikasi SPI mikrokontroler secara umum. Data dapat
dibaca dengan mengkonversi dengan hasil pembacaan 12-bit data.
Gambar 3.9.Skema Sensor SuhuThermocouple
3.3.2.3. Sensor Api UV Tron
Pada sistem yang dirancang untuk mendeteksi adanya api atau tidak
digunakan sensor api UV Tron. Sensor api UV Tron mampu menditeksi
gelombang inframerah antara 185 nm–300 nm. Sensor memiliki digital.
Dalam proses mendeteksi adanya api atau tidak, diperlukan sebuah
pengkondisisignal, agarsignalyang di hasilkan oleh sensor api UV Tron ini dapat terbaca oleh mikrokontroler. Dalam perancangan skripsi ini
memerlukan satu buah pin pada mikrokontroler dan pada skripsi ini
diberikan port D10.
3.4. Perancangan Perangkat Lunak
Pada bagian ini akan dijelaskan mengenai perancangan perangkat lunak yang
digunakan dalam skripsi ini. Perancangan perangkat lunak yang akan dijelaskan
mengenai mikrokontroler ATMega 2560 dan pengolahan data dari sensor api UV
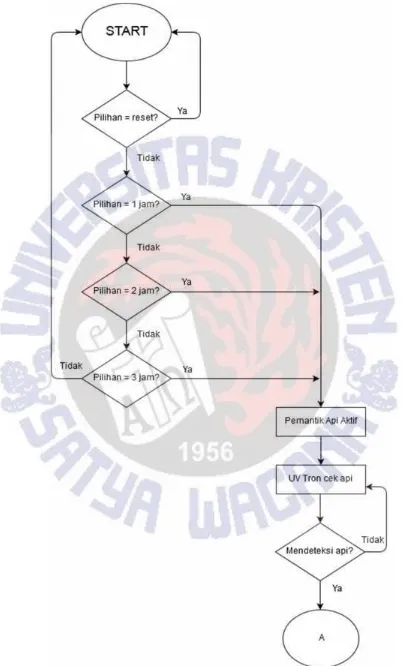
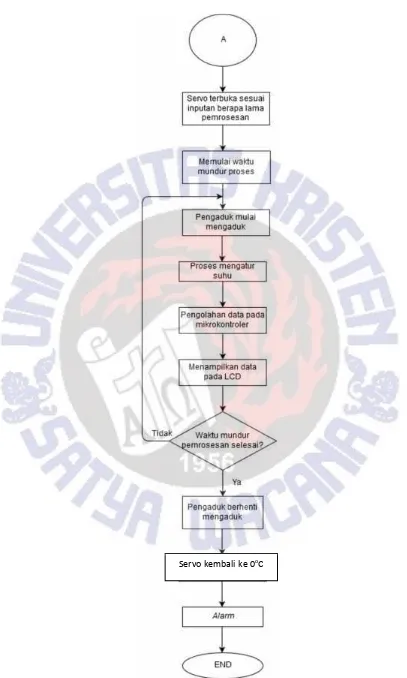
Penjelasan dari Gambar 3.10. adalah sebagai berikut :
• Sistem akan melalui proses pemasakan jamu ketika salah satu tombol push buttonlama pemrosesan ditekan oleh user.
• Setelah salah satupush buttonlama pemrosesan di tekan, maka servo akan membuka keran gas sebesar 20o.
• Setelah keran gas terbuka maka mikrokontroler akan mengaktifkan pematik api dan UV Tron akan mendeteksi adanya api atau tidak.
• Setelah UV Tron mendeteksi adanya api, servo akan membuka keran gas 30o, 60o, 90o, untuk lama proses memasak 1 jam, 30o, 60o, 80o, untuk
lama proses memasak 2 jam, 30o, 60o, 70o, untuk lama proses memasak 3
jam.
• Setelah kondisi servo telah terpenuhi, maka mikrokontroler akan mengaktifkanrelayuntuk mengaktifkan Motor AC yang akan
menggerakkanGear Box, dan pengaduk akan mulai mengaduk hingga waktu yang telah ditentukan, lama pemrosesan akan tertempil di LCD 20
x 4.
• Kemudian cek lagi, apakah waktu pemrosesan telah selesai?
• Jika YA, maka mikrokontroler akan menonaktifkanrelayyang menjadi pemicu Motor AC sehinggaGear Boxuntuk pengaduk berhenti berputar.
• Servo akan menutup keran gas ke 0o, sehingga kompor akan mati dan jamu sudah bisa diambil.
• Jika TIDAK, maka pengaduk tetap berputar sampai proses waktu memasak selesai.