BAB 2
TINJAUAN PUSTAKA
2.1. Motion Capture
Pada saat ini motion capture banyak ditemukan dalam berbagai bidang,
terutama pada dunia animasi dalam pembuatan film, industri game, analis bio
mekanik dan lain–lain [3]. Dengan semakin berkembangnya industri film dan game
maka saat ini bidang motion capture telah mengalami perkembangan yang sangat
pesat pula. Produk motion capture yang ada saat ini biasanya menggunakan optik,
magnetik ataupun alat mekanikal motion capture dengan menggunakan pakaian
khusus ataupun marker di seluruh tubuh. motions capture didefinisikan sebagai
pembentukan representasi objek 3D secara live, game development adalah pasar
terbesar untuk motion capture dengan pendapatan seperti pendapatan produksi film
[1].
Pada umumnya ada dua tipe utama karakter animasi objek 3D yang digunakan
dalam permainan yaitu: real-time playback dan cinematics, real-time playback
memungkinkan pemain untuk memilih dari pre-created moves, sehingga
pengendalian bergerak dalam real-time. Sedangkan cinematics adalah animasi full
render yang biasa digunakan untuk intro dan cut-scenes dalam game. Cinematics
umumnya tidak penting untuk game-play, tetapi menambahkan banyak visualisasi ke
permainan dan sangat membantu dalam pengembangan cerita. Motion capture
menciptakan karakter yang bergerak secara realistis, dalam situasi yang tidak praktis
atau terlalu berbahaya untuk aktor. Beberapa karakter film memerlukan penggunaan
motion capture supaya gerakan animasi tampak nyata [3]. Motion capture dapat
memberikan penghematan waktu yang besar untuk proyek animasi. Motion capture
dapat membuat proses animasi lebih mudah, terutama ketika menciptakan karakter
animasi yang realistis, seperti interaksi dari beberapa karakter 3D, atau ketika
karakter terlibat dalam aktifitas olahraga. Animasi sederhana, seperti karakter yang
sedang berdiri tanpa melakukan hal yang jauh lebih mudah dan lebih realistis ketika
menggunakan motion Capture [6].
2.1.1. Bidang aplikasi
Video game sering menggunakan motion capture untuk menganimasikan atlet,
seniman bela diri, dan karakter dalam game, hal ini telah dilakukan sejak game Atari
Jaguar berbasis CD Highlander: The Last dari MacLeods, dirilis pada tahun 1995.
Motion capture mulai digunakan secara intensif untuk memproduksi film yang
mensimulasikan tampilan bioskop secara live-action, dengan hasil hampir mendekati
fotorealistik dari model karakter digital [9].
The Polar Express menggunakan motion capture untuk memungkinkan Tom
Hanks dapat tampil beberapa karakter dalam bentuk berbeda. Film adaptasi tentang
Beowulf tahun 2007 adalah karakter animasi digital yang penampilanmnya didasarkan
sebagian pada para aktor yang memberikan gerakan mereka dan suara. James
Pandora. Walt Disney Company telah mengumumkan bahwa mereka akan
mendistribusikan Robert Zemeckis's A Christmas Carol dan Tim Burton's Alice in
Wonderland menggunakan teknik ini. Disney juga telah melakukan akuisisi Zemeckis
Image Movers digital yang memproduksi film motion capture. Film seri televisi yang
diproduksi sepenuhnya dengan animasi motion capture termasuk Laflaque di Kanada,
Sprookjesboom dan Cafe de Wereld di Belanda, dan Headcases di Inggris [9]. Selama
pembuatan film James Cameron's Avatar semua adegan yang dilakukan pada proses
ini di diarahkan secara realtime dengan menggunakan kostum pada aktor dengan
motion cupture yang terlihat seperti di film, sehingga memudahkan Cameron untuk
mengarahkan film seperti pada viewer. Metode ini memungkinkan Cameron untuk
melihat adegan-adegan yang tidak dapat dilihat dari pandangan dan sudut dari
animasi.
2.1.2. Sistem dan metode motion capture
Motion tracking atau motion capture dimulai sebagai sebuah alat analisis
fotogrametri dalam penelitian biomekanika pada 1970-an dan 1980-an, dan diperluas
ke pendidikan, pelatihan, olahraga, animasi, bioskop, dan video game sebagai
teknologi baru. Seorang aktor memakai penanda atau marker pada masing-masing
joint untuk mengidentifikasi gerak seperti pada Gambar 2.1. Akustik, inertial, LED,
marker magnetik atau reflektif, atau kombinasi dari semua gerakan ini diulang
beberapa kali sesuai dengan tingkat frekuensi yang diinginkan, untuk posisi
Gambar 2.1. Reflektif marker menempel pada kulit untuk mengidentifikasi landmark tulang dan gerakan 3D dari bagian tubuh [9]
2.1.3. Optical system
Sistem optik memanfaatkan data yang diambil dari sensor untuk melakukan
tracking pada posisi 3D dari sebuah objek dengan satu atau beberapa kamera yang
telah dikalibrasi. Pengambilan data secara tradisional dilaksanakan dengan
menggunakan marker khusus yang melekat pada aktor yang menyebabkan data yang
dihasilkan tidak akurat. Namun dengan sistem terbaru dari optical system mampu
identifikasi secara dinamis untuk setiap objek. Dalam memperluas area tracking dan
daerah capture para aktor melakukan dengan penambahan kamera, sistem ini
menghasilkan data dengan pergeseran 3 derajat untuk setiap marker [9].
2.1.4. Marker pasif
Sistem marker pasif menggunakan marker yang dilapisi dengan material yang
bersifat “retroreflective” yang mampu merefleksikan kembali cahaya yang dihasilkan
dekat dengan lensa kamera. Threshold dari kamera bisa diatur sedemikian rupa
hingga hanya cahaya terang hasil refleksi marker yang akan disampel dan tidak
melakukan sampling terhadap kulit dan kain yang ada pada aktor.
Centroid dari marker adalah hasil estimasi dari perhitungan image dua
dimensi yang ditangkap. Nilai keabuan atau graysclae value dari setiap piksel dapat
digunakan untuk menyediakan akurasi dari sub piksel dengan menemukan centroid
dari Gaussian. Sebuah objek dengan posisi marker yang telah diketahui digunakan
untuk melakukan kalibrasi kamera dan mendapatkan posisinya dengan distorsi lensa
setiap kamera telah diukur [9].
Secara umum sistem yang ada menggunakan 6 sampai 24 kamera. Vendor
memiliki kendala perangkat lunak untuk mengurangi masalah dari marker swapping
karena semua marker tampak identik. Tidak seperti sistem marker aktif dan sistem
magnetik, sistem pasif tidak membuat aktor untuk menggunakan kawat atau peralatan
Gambar 2.2. Contoh beberapa marker ditempatkan di titik-titik tertentu pada tubuh dan wajah aktor selama adegan motion capture [9]
Sebaliknya, ratusan bola karet melekat dengan selotip reflektif yang perlu
diganti secara berkala. Marker biasanya menempel langsung ke kulit seperti dalam
biomekanik, atau mereka dipasang pada pakain actor yang mengenakan full body
yang dirancang khusus untuk motion capture seperti pada Gambar 2.2[9].
2.1.5. Marker aktif
Sistem optikal aktif melakukan triangulasi posisi dengan memperlihatkan satu
LED dengan waktu yang sangat cepat atau beberapa LED dengan software untuk
mengidentifikasi LED terhadap posisi relatif dengan memantulkan kembali cahaya
yang dihasilkan secara eksternal, pada marker sendiri mempunyai kemampuan untuk
memancarkan cahayanya sendiri. Salah satu penerapan nya adalah pada serial TV
Effects). Aktor harus berjalan di sekitar alat peraga hal ini akan menyulitkan untuk
penggunaan sistem marker aktif [9].
2.1.6. Time modulated active marker
Sistem marker aktif adalah sistem marker dengan menyalakan satu penanda
pada waktu tertentu, atau melakukan tracking beberapa marker dalam waktu tertentu
dengan melakukan modulasi dari amplitudo untuk mendapatkan indentitas. Resolusi
spasial 12 megapiksel pada sistem yang termodulasi menunjukkan pergerakan lebih
halus dari sistem optik 4 megapiksel yang memiliki resolusi yang lebih tinggi.
Dengan sistem ini sutradara dapat melihat gerakan aktor secara real time pada
motion capture, penempatan marker yang akurat akan mengurangi nilai error
sehingga dapat menghasilkan data yang lebih bersih [1].
2.1.7. Semi-passive imperceptible marker
Sebuah sistem yang didasarkan pada kamera kecepatan tinggi, sistem ini
menggunakan multi-LED proyektor berkecepatan tinggi yang murah. Sistem ini
dirancang secara khusus pada ruang motion capture. Dibandingkan penggunaan
retro-reflektif atau LED marker, sistem ini menggunakan tag marker foto sensitif
untuk memproses sinyal optik pada poin scene, tag dapat menghitung tidak hanya
2.1.8. Markerless motion capture
Teknik dan penelitian dalam visi komputer menuju perkembangan pesat dari
pendekatan motion capture beralih ke markerless motion capture, sistem seperti yang
dikembangkan di Stanford, University of Maryland, MIT, dan Max Planck Institute
dalam melakukan tacking objek tidak memakai peralatan khusus akan tetapi dengan
system komputer yang dirancang khusus dan diterapkan pada sistem untuk
menganalisisa beberapa aliran input optik dan mengidentifikasi bentuk tersebut untuk
tracking [10], seperti pada Gambar 2.3.
2.2. Principal Component Analysis (PCA)
Principal Component Analysis (PCA) adalah teknik reduksi dimensi yang
umum digunakan pada aplikasi pemorosesan citra dan sinyal processing seperti pada
Gambar 2.4 [4]. Untuk mewakili benda yang mampu terdeformasi, baik dalam 2D
dan 3D. Tujuan utama dari PCA adalah untuk pemadatan data atau pengurangan
dimensi. Komponen yang tidak berkorelasi diberi nama “Principal Component”,
yang terbukti sesuai dengan nilai-nilai eigen terbesar dan eigen vektor dari matrik
varians-kovarians dari data sampel [4].
Gambar 2.4. Contoh PCA dari distribusi Gaussian multivariat [4]
Sumbu panjang menunjukkan arah sebaran titik dengan varians terbesar
sedangkan sumbu pendek menunjukkan luas sebaran titik, untuk sumbu panjang
dijadikan sebagai komponen utama (Principal Component) dan kemudian baru sumbu arah sebaran titik
luas sebaran titik
yang pendek. Principal Component Analysis (PCA) merupakan teknik linier untuk
memproyeksikan data vektor yang berdimensi tinggi ke vektor yang mempunyai
dimensi lebih rendah, Principal Component Analysis (PCA) lebih banyak digunakan
untuk keperluan ektraksi fitur gambar, dimana jumlah dimensi dari gambar jauh lebih
besar dibandingkan dengan jumlah data sampel yang digunakan. Untuk melakukan
proyeksi sampel vektor dari gambar pelatihan, semua gambar pelatihan disusun
dalam bentuk vektor baris. Apabila vektor gambar pelatihan mempunyai dimensi mxn
tersebut diortogonalisasi dengan menentukan eigenvector dan eigenvalue, maka
dimensinya akan berubah menjadi mxm, dimana m<n. Pengurangan dimensi yang
sangat signifikan ini akan sangat membantu untuk mempercepat proses komputasi
saat melakukan klasifikasi fitur. Sebelum klasifikasi fitur dilakukan maka akan
dilakukan penyelesaian eigenface untuk data pelatihan. Model matrik data pelatihan
dapat ditulis dalam persamaan (2.1).
...(2.1)
jika n>>m dimana n merupakan dimensi gambar, dan m adalah jumlah gambar yang
dilatih. Berdasarkan persamaan (2.1) maka rata-rata seluruh data sampel dapat
dihitung dengan menggunakan persamaan (2.2). Hasil persamaan (2.2) merupakan
vektor yang berbasis nilai rata-rata, karena jumlah dimensi adalah n, maka nilai
...(2.2)
Nilai rata-rata nol (zero mean) dari suatu sampel data dapat dihitung dengan
mengurangkan nilai masing-masing data sampel dengan rata-rata data jumlah seluruh
data sampel. Persoalannya adalah dimensi yang tidak sama antara data sampel (mxn),
sedangkan dimensi dari rata-rata seluruh data sampel (1xm). Matrik rata-rata gambar
data sampel yang telah digandakan sebanyak m kali dapat ditulis menggunakan
persamaan (2.3).
... (2.3)
Dan nilai dari pada baris ke i = nilai baris ke i + 1 dan
berlaku , maka hasil persamaan (2.3) dapat digunakan
untuk menghitung zero mean. Zero mean data dapat dimodelkan menggunakan
persamaan (2.4) [4].
...(2.4)
...(2.5)
Hasil perhitungan zero mean digunakan untuk mendapatkan nilai matrik
konvarian selain dapat dimodelkan menggunakan persamaan (2.5), juga dilakukan
dengan mengalikan transpos zero mean, seperti pada persamaan (2.6).
...(2.6)
Matrik konvarian disusun dari nilai-nilai varian yang telah ditentukan, dengan
model simetris. Untuk dua parameter yaitu xidan xi+1, maka matrik konvarian dapat
ditulis seperti pada persamaan (2.4). Untuk 3 parameter dan n parameter persamaan
dapat ditulis seperti pada persamaan (2.7) dan (2.8).
....(2.8)
Berdasarkan persamaan (2.8), maka dimensi dari konvarian menjadi mxn,
dengan berkurangnya jumlah dimensi yang sangat signifikan pada matrik konvarian,
maka akan menyebabkan berkurangnya dimensi pada saat menentukan eigenvector.
...(2.9)
... (2.10)
Untuk mendapatkan ciri dari suatu data sampel yang di representasikan dalam
bentuk matrik, maka dihitung eigenvector dan eigenvalue dari matrik konvarian. Jika
C adalah matrik bujur sangkar dengan ukuran sembarang m>1, maka vektor tidak nol
pada Rn disebut eigenvector dari C jika suatu penggandaan skalar dari ,
disebut sebagai eigenvector dari C yang berpadanan terhadap , untuk mendapatkan
eigenvector dan eigenvalue, maka dapat ditunjukan pada persamaan (2.11).
... (2.11)
...(2.12)
Atau dapat dituliskan menggunakan persamaan (2.13) berikut:
...(2.13)
...(2.14)
Hasil dari persamaan (2.14) adalah berupa vektor, yaitu eigenvalue
diurutkan secara menurun dari nilai paling besar menuju nilai yang paling kecil
. Eigenvector yang bersesuaian dengan nilai terbesar dari
eigenvalue mempunyai ciri yang paling dominan, sedangkan nilai eigenvector yang
bersesuaian dengan eigenvalue yang paling kecil mempunyai ciri paling tidak
2.3. Active Appearance Models (AAM)
AAM erat terkait dengan konsep aktif blobs dan modelmorphable, non-linear,
generatif, dan parametrik model dari fenomena visual tertentu untuk memaksimalkan
"match point" antara contoh model dan citra masukan [11,14]. Model parameter yang
kemudian digunakan dalam aplikasi tertentu. Sebagai contoh, parameter dapat
dimasukkan ke classifier untuk menghasilkan algoritma pada pengenalan wajah [12].
Pendekatan yang biasa secara iteratif memecahkan update aditif tambahan untuk
parameter (bentuk dan koefisien penampilan). Mengingat perkiraan parameter bentuk
citra masukan ke koordinat frame model dan kemudian untuk menghitung kesalahan
model. AAM merupakan metode pembelajaran statistik, yang dilatih dari sebuah kelas
obyek non-rigid dalam hal ini wajah. AAM bekerja dengan fitting model untuk sebuah
parameter gambar suatu optimasi pencari jenis obyek [13]. Tujuan dari pencarian ini
adalah untuk mencapai deskripsi parameter obyek dalam citra. Active Appearance
Models memiliki sekumpulan model template deformable, dan dapat dipahami sebagai
metode pencocokan template yang canggih [1].
2.4. Analisis Procrustes
Korespondensi dan analisis bentuk memainkan peran yang penting dalam
bidang komputer vision, tidak hanya dalam menentukan korespondensi, tetapi juga
menentukan validitas algoritma yang digunakan untuk menempatkan landmark di
lokasi yang akurat. Analisis harus didefinisikan dengan baik sehingga tidak bias dan
menyeluruh dalam evaluasi. Procrustes analisis yang digunakan adalah analisis bentuk
adanya kesesuaian antara dua atau lebih bentuk landmark. Analisis procrustes adalah
orthogonal atau biasa disebut Generalized Orthogonal Procrustes Analysis (GPA)
digunakan untuk korespondensi bentuk karena sifat orthogonal rotasi matriks. Gower
telah memerankan peran penting dalam pengenalan dan derivasi dari analisis
Procrustes ortogonal pada tahun 1971-1975. Meskipun Hurley dan Cattell pertama
kali menggunakan istilah analisis procrustes pada tahun 1962 dengan metode yang
tidak membatasi untuk transformasi sebuah matriks ortogonal [15]. Pada teknik ini
mengeksplorasi bentuk dan mempertahankannya.
Tabel 2.1. Algoritma generalized orthogonal procrustes analysis (GPA) [15]
1. Memililih satu bentuk menjadi bentuk perkiraan rata-rata awal (yaitu set bentuk pertama).
2. Menyejajarkan posisi bentuk dengan bentuk mean perkiraan.
a.Menghitung centroid masing-masing bentuk (atau sekumpulan Landmark). b.Menyelaraskan semua bentuk centroid ke bentuk asal.
c.Menormalkan centroid setiap bentuk ukuran.
d.Memutar bentuk masing-masing untuk menyelaraskan dengan rata-rata perkiraan terbaru.
3. Mengitung rata-rata perkiraan baru dari bentuk selaras.
4. Jika rata-rata perkiraan dari langkah 2 dan 3 berbeda kembali ke langkah 2, jika tidak, berarti telah menemukan bentuk mean sebenarnya dari himpunan.
Analisis procrustes memiliki beberapa keunggulan, terutama pada pendekatan
proses korespondensi pada bentuk, kompleksitas algoritmanya rendah sehingga
memungkinkan untuk diimplementasi dengan mudah. Selain ituGeneralized
Orthogonal Procrustes Analysis (GPA) merupakan solusi praktis untuk penyelarasan
obyek yang mirip. Analisis Procrustes adalah cara yang efektif untuk menyesuaikan
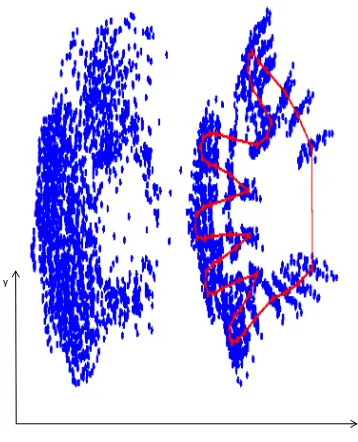
brutal terhadap pengambilan hampir semua data [15]. Gambar 2.5 distribusi titik yang
merepresentasikan bentuk tangan setelah dilakukan proses rata-rata yang diberikan
pada warna merah [15].
Gambar 2.5. Distribusi titik yang merepresentasikan bentuk tangan setelah dilakukan proses rata-rata yang diberikan pada warna merah [15]
2.4.1. Translasi
Tahap translasi memindahkan semua bentuk ke pusat dasarnya, titik awalnya
adalah (0,0) ini adalah yang paling mungkin untuk mewakili titik pusat umumnya,
namun tidak secara eksklusif begitu. Sebagai contoh berikut ini titik asal yang akan
menjadi pusat umum.
...(2.15)
...(2.16)
Dimana:
X: k x m matriks koordinat dari Landmark k dalam dimensi m (m=2 atau 3)
Xc: baru koordinat dari X berpusat pada titik asal
Titik pusat dihitung dari jumlah kolom matriks X dibagi dengan jumlah
landmark (sejumlah baris). Setelah titik pusat dihitung kemudian mengurangkan titik
pusat dari setiap elemen di pusat akan matriks itu pada titik asal [1].
2.4.2. Isomorphic Scaling
Skala isomorfik adalah teknik manipulasi yang mentransformasikan bentuk
Normalisasi adalah jenis transformasi isomorfik yang berguna untuk skala bentuk
Bila matriks telah disesuaikan dan diskalakan selanjutnya akan dilakukan
proses rotasi. Pada saat melakukan rotasi perlu dilakukan penyelarasan semua bentuk
ke satu bentuk target.
X: koordinat X berpusat dan normalisasi.
Q: rotasi ortogonal matriks untuk menyelaraskan X dengan rata-rata.
: rata-rata matriks.
Rotasi akan menggunakan eucidean/frobenius normal di mana ||A||=trace
(A'A), yang merupakan jumlah kuadrat dari elemen A[2]. Jadi, akan meminimalkan
perbedaan antara rata-rata dan merotasikan bentuk matriks dengan menggunakan
jumlah kuadrat.
...(2.18)
...(2.19)
Oleh karena bagian pertama tidak mengandung Q, maka:
...(2.20)
Dengan Menggunakan dekomposisi nilai singular dari dan properti
cyclic dari trace maka dapat dilihat pada persamaan ( 2.21).
…....(2.21)
H=V'QU adalah ortogonal (pxp) matriks karena merupakan produk dari orthogonal
matriks. Dengan demikian, memiliki persamaan (2.22).
...(2.22)
Oleh karena itu, karena si adalah bilangan tidak-negatif dan trace (SH) adalah
maksimum pada saat hii= 1 untuk i = 1, 2 ... p (nilai maksimal dari suatu matriks
ortogonal), memiliki persamaan (2.23).
...(2.23)
Sehingga Q minimum || XQ - || adalah:
...(2.24)
Oleh karena itu rotasi tersebut diselesaikan dengan mengalikan VU' ke X matriks agar
![Gambar 2.1. Reflektif marker menempel pada kulit untuk mengidentifikasi landmark tulang dan gerakan 3D dari bagian tubuh [9]](https://thumb-ap.123doks.com/thumbv2/123dok/3930844.1874264/4.612.186.491.90.432/gambar-reflektif-marker-menempel-mengidentifikasi-landmark-tulang-gerakan.webp)
![Gambar 2.2. Contoh beberapa marker dan wajah aktor selama adegan ditempatkan di titik-titik tertentu pada tubuh motion capture [9]](https://thumb-ap.123doks.com/thumbv2/123dok/3930844.1874264/6.612.116.532.91.309/gambar-contoh-beberapa-selama-adegan-ditempatkan-tertentu-capture.webp)
![Gambar 2.3. Contoh aplikasi markerless dalam mendeteksi gerakan ekspresi wajah [ 10]](https://thumb-ap.123doks.com/thumbv2/123dok/3930844.1874264/8.612.142.505.311.637/gambar-contoh-aplikasi-markerless-dalam-mendeteksi-gerakan-ekspresi.webp)
![Gambar 2.4. Contoh PCA dari distribusi Gaussian multivariat [4]](https://thumb-ap.123doks.com/thumbv2/123dok/3930844.1874264/9.612.194.470.311.562/gambar-contoh-pca-dari-distribusi-gaussian-multivariat.webp)