RANCANG BANGUN ALAT PENGUKUR JARAK
DENGAN SENSOR SHARP GP2D12 BERBASIS ATMEGA8
PROJEK AKHIR I
FRANSISKA JUNIATI BARINGBING
132411006
PROGRAM STUDI D-3 METROLOGI DAN INSTRUMENTASI
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
RANCANG BANGUN ALAT PENGUKUR JARAK
DENGAN SENSOR SHARP GP2D12 BERBASIS ATMEGA8
Diajukan Untuk Memenuhi Syarat Menyelesaikan Kuliah
pada Program Studi D3 Metrologi dan Instrumentasi
FRANSISKA JUNIATI BARINGBING
132411006
PROGRAM STUDI D3 METROLOGI DAN INSTRUMENTASI
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
HALAMAN PENGESAHAN
RANCANG BANGUN ALAT PENGUKUR JARAK
DENGAN SENSOR SHARP GP2D12 BERBASIS ATMEGA8
FRANSISKA JUNIATI BARINGBING
132411006
Medan, 26 Januari 2016
Menyetujui, Ketua Prodi D3 Metrologi dan Instrumentasi Pembimbing FMIPA USU
Dr. Diana A. Barus,M.Sc Junedi Ginting, S.Si, M.Si
SURAT PERNYATAAN
Saya yang bertandatangan di bawah ini :
Nama : Fransiska Juniati Baringbing Tempat/Tanggal Lahir : Medan/23 Juni 1995
Dept./Program Studi : Fisika /D3 Metrologi dan Instrumentasi Fakultas : Matematika Dan Ilmu Pengetahuan Alam Perguruan Tinggi : Universitas Sumatera Utara
Judul Karya Tulis Ilmiah : Rancang Bangun Alat Pengukur Jarak Dengan Sensor Sharp GP2D12 Berbasis ATMEGA8
Dengan ini menyatakan bahwa karya tulis ilmiah yang saya sampaikan pada kegiatan projek akhir I ini adalah benar karya sendiri dan/atau bukan merupakan plagiasi.
Apabila dikemudian hari ditemukan bahwa karya tulis ilmiah yang saya sampaikan bukan karya saya sendiri/plagiasi, saya bersedia menerima sanksi akademik atau yang lainnya.
Medan, 25 Januari 2016 Yang menyatakan
KATA PENGANTAR
Puji dan syukur kepada Tuhan Yang Maha Esa karena berkat dan rahmat-Nya kepada kita semua, sehingga penulis dapat menyelesaikan Laporan Projek Akhir I ini dengan baik.
Laporan Projek Akhir I ini merupakan salah satu syarat yang harus dipenuhi untuk menyelesaikan pendidikan D3 pada Program Studi Metrologi dan Instrumentasi Fakultas Matematika dan Ilmu Pengetahua Alam Universitas Sumatera Utara.
Selama pelaksanaan penyusunan Laporan Projek Akhir I hingga selesainya laporan ini penulis banyak mendapat bantuan, dorongan, motivasi baik secara langsung maupun tidak langsung. Maka pada kesempatan ini, penulis mengucapkan terimakasih kepada :
1. Dr. Sutarman, M.Sc, selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
2. Dr. Marhaposan Situmorang, selaku Ketua Departemen Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara
3. Dr. Diana A. Barus M.Sc, selaku Ketua Program Studi D-III Metrologi dan Instrumentasi FMIPA USU
4. Junedi Ginting, S.Si, M.Si, selaku Pembimbing yang telah membimbing dan mengarahkan penulis dalam penyelesaian laporan ini.
Penulis menyadari bahwa dalam penyusunan laporan ini masih terdapat banyak kekurangan dan kesalahan.Oleh karena itu, penulis sangat mengharapkan saran dan kritik untuk perbaikan penulisan di kemudian hari.Akhir kata, semoga laporan Projek Akhir I ini dapat memberi manfaat dan menambah wawasan maupun pengetahuan kita.
DAFTAR ISI
1.2 Maksud dan Tujuan Penulisan……….……… 2
1.3 Rumusan Masalah……….………... 2
1.4 Batasan Masalah……….………...….. 2
1.5 Metodologi Penelitian……….………. 3
1.6 Tinjauan Pustaka……….………. 4
1.7 Sistematika Penulisan……….. 4
BAB II LANDASAN TEORI……… 6
2.1 Sensor………... 6
2.1.1 Sensor Jarak……….. 6
2.1.2 Sensor Jarak Sharp GP2D12………. 7
2.1.3 Spesifikasi GP2D12……….. 9
2.2 Mikrokontroler ATmega8………. 9
2.2.1 Rangkaian Sistem Minimum AVR ATmega8……….. 9
2.2.1.1 Arsitektur Mikrokontroler AVR ATmega8…...……...… 10
2.2.1.2 Penjelasan Fungsi PIN Mikrokontroler AVR ATmega8.. 12
2.3 Bahasa Basic menggunakan Code Vision AVR (CV AVR)…... 15
BAB III PERANCANGAN ALAT…………...……… 21
3.1 Diagram Blok Rangkaian……… 21
3.1.1 Fungsi Tiap Blok………. 21
3.2 Rangkaian Regulator………...……… 22
3.3 Rangkaian Mikrokontroler ATmega8………...………….. 22
3.4 Rangkaian LCD………...……… 23
3.5 Rangkaian Sensor Jarak………...……… 25
3.6 Diagram Alir Pemrograman………...………. 26
BAB IV IMPLEMENTASI SISTEM………..……. 27
4.1 Pengujian LM7805 sebagai Regulator………...………. 27
4.2 Pengujian Rangkaian Mikrokontroler ATmega8………...…………. 28
4.3 Interfacing LCD 2x16………...………….. 29
4.4 Pengujian Sensor Jarak………...……… 30
4.5 Data Pengujian Alat………...………. 34
4.5.1 Menentukan %Ralat pada Pengujian Alat………..………… 34
BAB V KESIMPULAN DAN SARAN………..……… 35
5.1 Kesimpulan………..……….. 35
5.2 Saran………..……… 36
DAFTAR PUSTAKA………..……… 37
LAMPIRAN 1 PROGRAM LENGKAP SENSOR SHARP GP2D12 LAMPIRAN 2 DATA SHEET SENSOR SHARP GP2D12
DAFTAR GAMBAR
Gambar 2.1 Sensor Sharp GP2D12…………..………. 8
Gambar 2.2 Sistem Minimum AVR ATmega8……… 10
Gambar 2.3 Pin ATmega8……… 12
Gambar 2.4 LCD Pendeteksi Jarak……….. 16
Gambar 2.5 Konfigurasi Pin LCD………...… 18
Gambar 3.1 Diagram Blok Rangkaian………. 21
Gambar 3.2 Rangkaian Regulator IC LM7805……… 22
Gambar 3.3 Rangkaian Sistem Minimum Mikrokontroler ATmega8…………. 22
Gambar 3.4 Rangkaian LCD………....… 24
Gambar 3.5 Rangkaian Sensor Jarak……….…... 25
Gambar 3.6 Diagram Alir Pemrograman……….….…...… 26
Gambar 4.1 LM7805……….….…….. 27
Gambar 4.2 Informasi Signature Mikrokontroler……….…….…….. 28
DAFTAR TABEL
Tabel 2.1 Konfigurasi Pin Port B ATmega8……… 13
Tabel 2.2 Konfigurasi Pin Port D ATmega8……… 14
Tabel 2.3 Operasi Dasar LCD……….. 19
Tabel 2.4 Konfigurasi Pin LCD………...… 20
ABSTRAK
Alat pengukur jarak ini menggunakan Sensor Sharp GP2D12. Sensor Sharp GP2D12 ini digunakan sebagai pendeteksi jarak dengan menggunakan inframerah, dengan jangkauan jarak 10cm – 80cm. Pengendali utama pada alat ini menggunakan ATmega8. Alat ini digunakan untuk mengukur jarak dan untuk membandingkan alat ukur uji dengan alat standard berbasis ATmega dan ditampilkan pada LCD 2x16 yang telah dirancang dan direalisasikan menggunakan Sensor Sharp GP2D12 sebagai masukan dan LCD sebagai keluaran. Komponen lainnya yang mendukung alat pengukur jarak ini adalah adanya IC Regulator 7805 sebagai penstabil tegangan yang akan dikeluarkan, PSA (Power Supply Adaptor) yang digunakan adalah Baterai 9 Volt sebagai penyedia tegangan.
BAB I
PENDAHULUAN
1.1 Latar Belakang
Berkembangnya ilmu pengetahuan dan teknologi mendorong manusia untuk menciptakan berbagai jenis teknologi yang digunakan manusia untuk dapat mempermudah dalam melakukan pekerjaan.
Salah satu teknologi yang berkembang adalah teknologi dibidang pengukuran jarak. Pengukuran yang digunakan saat ini masih tergantung dengan sensor yang digunakan untuk mendapat jarak atau range yang tinggi.
Dengan pengukuran yang demikian masih memiliki kelemahan yaitu tidak dapat dilakukan secara terus menerus karena adanya faktor dari manusia ataupun faktor dari alat itu sendiri, seperti adanya kelemahan dari masing-masing komponen yang dipakai.
Salah satu syarat yang perlu dipenuhi suatu alat pengukur jarak adalah terpeliharanya tingkat akurasi atau tingkat ketelitian pada alat tersebut dikarenakan rendahnya spesifikasi sensor yang digunakan pada alat tersebut. Hal ini pasti akan berpengaruh terhadap hasil atau data pengukuran.
1.2 Maksud dan Tujuan Penulisan
Maksud dari penulisan projek akhir 1 ini antara lain guna mempermudah dalam mendeteksi jarak yang lebih akurat, sehingga dapat diaplikasikan di dalam segala aspek pengukuran.
Tujuan dari projek ini adalah merancang dan membuat suatu instrumentasi untuk: 1. Mengetahui fungsi Sensor Sharp GP2D12 secara umum.
2. Mengetahui jarak yang di ukur pada percobaan pengujian alat 3. Mengetahui perbandingan ralat yang di dapatkan dari pengujian.
1.3 Rumusan Masalah
Berdasarkan latar belakang tersebut maka dapat dirumuskan permasalahan sebagai berikut:
1. Bagaimana merancang dan membuat suatu alat pengukur jarak 2. Bagaimana sistem kerja sensor GP2D12 sebagai sensor jarak 3. Pemanfaatan ATmega8 sebagai pusat pengendali
4. Pembuatan alat ukur jarak agar diperoleh ralat yang kecil
1.4 Batasan Masalah
Mengingat pembahasan dalam perancangan alat yang dibuat dapat meluas maka tulisan ini mempunyai batasan masalah sebagai berikut :
1. Alat pengukur jarak dari sistem ini mengunakan LCD 2 x 16.
1.5 Metodologi Penelitian
Metodologi yang digunakan dalam penulisan tugas akhir ini adalah sebagai berikut:
a. Metode pustaka
Mencari data - data yang berkaitan dengan alat yang akan dibuat, dari literatur, jurnal elektronika dan situs-situs internet untuk mempelajari karakterisitik sensor Sharp GP2D12 termasuk cara pemrograman dengan menggunakan Atmega8.
b. Metode perencanaan dan pembuatan alat
Untuk membuat alat ini dilakukan langkah-langkah sebagai berikut: 1. Mencoba-coba alat atau rangkaian sesuai dengan data-data yang
telah diperoleh dan sesuai spesifikasi alat yang diinginkan. 2. Melaksanakan perencanaan tiap-tiap blok diagram kemudian
digabungkan sehingga menjadi satu sistem.
c. Mempersiapkan komponen yang diperlukan antara lain sebagai berikut: 1. Sharp GP2D12 sebagai sensor yang akan bekerja mendeteksi jarak 2. ATMega8 sebagai pusat pengendali alat dan memproses data. 3. IC Regulator 7805 sebagai penguat dan pengatur tegangan yang
akan masuk sebesar 5V
4. LCD sebagai display/penampil hasil jarak yang telah di deteksi pada suatu tempat.
d. Pembuatan alat
e. Pengujian alat
pengujian alat dilakukan untuk mengetahui apakah sistem yang dibuat telah bekerja dengan baik. Pengujian dilakukan pada tiap-tiap blok, kemudian dilakukan pengujian sistem secara keseluruhan.
f. Kalibrasi alat
Membandingkan hasil pengukuran dengan alat ukur standar melalui beberapa tahap.
g. Konsultasi dengan dosen pembimbing serta mencari sumber informasi yang berhubungan dengan pembuatan projek.
1.6 Tinjauan Pustaka
Studi pustaka dimaksudkan untuk mendapatkan landasan teori, data-data atau informasi sebagai bahan acuan dalam melakukan perencanaan, percobaan, pembuatan dan penyusunan projek 1.
1.7 Sistematika Penulisan
Adapun sistematika penulisan projek 1 ini adalah sebagai berikut: BAB 1 : PENDAHULUAN
Bab ini akan membahas latar belakang projek akhir, maksud dan tujuan penulisan, rumusan masalah, batasan masalah, metodologi penelitian, tinjauan pustaka, dan sistematika penulisan.
BAB 2 : LANDASAN TEORI
BAB 3 : PERANCANGAN ALAT
Akan dibahas secara detail tentang perancangan konstruksi alat, sistem program untuk mengolah data dari masukan sensor,dan penampilan ke LCD.
BAB 4 : IMPLEMENTASI SISTEM
Berisikan tentang pengujian terhadap setiap komponen dan pengujian keseluruhan
BAB 5 : KESIMPULAN DAN SARAN
BAB II
LANDASAN TEORI
2.1 Sensor
Sensor adalah alat yang dapat digunakan untuk mendeteksi dan sering berfungsi untuk mengukur magnitude sesuatu.
Sensor merupakan jenis transduser yang digunakan untuk mengubah variasi mekanis, magnetis, panas, sinar dan kimia menjadi tegangan dan arus listrik.
2.1.1 Sensor Jarak
Sensor jarak dapat diartikan sebagai sensor yang berfungsi untuk mengukur serta mengetahui letak dari sebuah objek yang berbeda jaraknya. Sensor untuk mengetahui jarak ini pada perkembangannya memiliki dua kelompok, yang pertama adalah sensor ultrasonik dan yang kedua adalah sensor infra merah.
Sensor ultrasonik untuk mengukur jarak dihasilkan dari gelombang ultrasonic yang dipancarkan atau dikeluarkan oleh transmitter atau alat pemancar gelombang ultrasonic. Transmitter mengeluarkan gelombang ultrasonic yang dihasilkan dari frekuensi diatas normal dari gelombang suara.
pancaran gelombang ultrasonic tersebut akan terhenti dan dengan kemudian berbalik arah menuju alat penerima sinyal ultrasonic atau lebih dikenal dengan istilah receiver yang terdapat pada sensor jarak. Pada saat itu juga receiver akan memberikan data dari hasil tangkapan gelombang ultrasonic tadi kepada mikro kontroler yang kemudian oleh mikro kontroler akan diproses menjadi sebuah data mengenai bentuk objek dan jarak dari objek yang tersentuh gelombang ultrasonic tadi. Jaraknya gelombang yang dipancarkan oleh transmitter tergantung pada alat yang digunakan.
Jenis selanjutnya dari sensor jarak adalah sensor infra merah. Perbedaan sensor infra merah dengan sensor ultrasonic sendiri sebenarnya sangat kecil, karena perbedaannya hanya terletak pada cara kerjanya. Apabila pada sensor ultrasonic mempergunakan gelombang ultrasonic untuk mendeteksi sebuah objek pada jarak tertentu. Maka pada sensor infra merah, untuk dapat mendeteksi sebuah objek dan mendapatkan gambaran serta jaraknya adalah dengan menggunakan panas tertentu dari sebuah benda atau objek.
Setiap suhu panas dari suatu objek akan tertangkap oleh sensor infra merah karena infra merah menggunakan sumber utamanya yaitu radiasi panas atau juga radiasi termal. Sensor ini biasanya digunakan sebagai indra penglihatan dari robot seperti layaknya sebuah mata pada manusia.
2.1.2 Sensor Jarak Sharp GP2D12
sebuah objek) akan ditangkap oleh bagian detektor yang terdiri dari lensa pemfokus dan sebuah position-sensitive detector.
Gambar 2.1 Sensor Sharp GP2D12
Sensor Sharp GP2D12 dapat mengukur jarak halangan pada 10cm – 80 cm dengan memanfaatkan pemancaran dan penerimaan gelombang infra merah sebagai media untuk mengestimasi jarak. Penggunaan sperktrum infra merah menyebabkan sensor ini tidak mudah terganggu dengan keberadaan cahaya tampak dari lingkungan karena memiliki daerah spektrum yang berbeda.
Untuk menghitung jarak objek pada wilayah pandangnya, sensor ini menggunakan metode triangulation dan sebuah linear CCD array sebagai position-sensitive detector. Pertama-tama, emitter memancarkan sinyal IR yang telah dimodulasi ke arah target. Sinar ini berjalan sepanjang sudut pandangnya dan akan dipantulkan oleh objek yang menghalanginya. Jika tidak mengenai objek, IR tidak akan dipantulkan kembali dan sensor mendeteksi ketidakberadaan objek.
Pantulan IR akan diterima oleh lensa pada detektor dan difokuskan ke linear CCD array. Detektor akan mendeteksi sudut datang IR hasil pantulan sebagai parameter jarak.
sesuai sudut datang dari IR. Dengan kata lain, lokasi penerima cahaya pada CCD array akan merepresentasikan jarak objek.
2.1.3 Spesifikasi GP2D12
Sensor Sharp GP2D12 mempunyai spesifikasi catu daya 4,5 VDC – 5,5 VDC, Arus 30mA, jarak jangkauan : 10cm – 80cm, antarmuka outputnya tegangan analog, dimensi: 1.75 x 0.74 x 0.53 in (4.45 x 1.89 x 1.35 cm).
2.2 Mikrokontroler ATmega8
Mikrokontroler adalah sebuah system microprocessor dimana didalamnya sudah terdapat CPU, ROM, RAM, I/O, Clock dan peralatan internal lainnya yang sudah saling terhubung dan terorganisasi (teralamati) dengan baik oleh pabrik pembuatnya dan dikemas dalam satu chip yang siap pakai. Sehingga kita tinggal memprogram isi ROM sesuai aturan penggunaan oleh pabrik yang membuatnya.
Teknologi yang digunakan pada mikrokontroler AVR berbeda dengan mikrokontroler seri MCS-51. AVR berteknologi RISC (Reduced Instruction Set Computer), sedangkan seri MCS-51 berteknologi CISC (Complex Instruction Set Computer).
Mikrokontroler AVR dapat dikelompokkan menjadi empat kelas, yaitu keluarga ATtiny, keluarga AT90Sxx, keluarga ATMega, dan keluarga AT89RFxx.Pada dasarnya yang membedakan masing-masing kelas adalah memori, kelengkapan periperal dan fungsi-fungsi tambahan yang dimiliki.
2.2.1 Rangkaian Sistem Minimum AVR ATmega8
kemudian bisa dihubungkan dengan rangkaian lain untuk menjalankan fungsi tertentu. Di keluarga mikrokontroler AVR, seri 8 adalah salah satu seri yang sangat banyak digunakan. Untuk membuat rangkaian sistem minimum Atmega AVR 8 diperlukan beberapa komponen yaitu IC mikrokontroler Atmega8, XTAL 4 MHz, kapasitor, resistor, trimpot, IC Regulator 7805, Atmega8.
Selain itu tentunya diperlukan power supply (adaptor) yang bisa memberikan tegangan 5V DC. Rangkaian sistem minimum ini sudah siap untuk menerima sinyal analog (fasilitas ADC) di port A.
Gambar rangkaiannya adalah sebagai berikut:
Gambar 2.2 Sistem Minimum AVR ATmega8 2.2.1.1 Arsitektur Mikrokontroler AVR ATmega8
(Random Access Memory), Input-Output, dan fasilitas pendukung lainnya. Mikrokontroler AVR memiliki arsitektur RISC 8 bit, di mana semua instruksi dikemas dalam kode 16-bit (16-bit word) dan sebagian besar instruksi dieksekusi dalam 1 (satu) siklus clock, berbeda dengan instruksi MCS51 yang membutuhkan 12 siklus clock.
Hal ini terjadi karena kedua jenis mikrokontroler tersebut memiliki arsitektur yang berbeda. AVR berteknologi RISC (Reduced Instruksi Set Computing), sehingga eksekusi instruksi dapat berlangsung sangat cepat dan efisien. Sedangkan seri MCS51 berteknoli CISC (Complex Instruktion Set Computing). Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral, dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka bias dikatakan hampir sama.
Mikrokontroler AVR sudah menggunakan konsep arsitektur Harvard yang memisahkan memori dan bus untuk data dan program, serta sudah menerapkan single level pipelining.
Berikut adalah feature-feature mikrokontroller seri ATmega8. 1. Memori Flash 8 Kbytes dalam programmable flash
2. Memori EEPROM 512 bytes untuk data yang dapat diprogram saat operasi 3. Memori SRAM 1 bytes untuk data
4. Dua buah Timer / Counter18 bit dengan kemampuan pembandingan 5.Watchdog Timerdengan osilator internal
6. 6 channel ADC, Empat Saluran 10-bit Akurasi dan Dua Saluran 8-bit Akurasi 7. Lima Mode Sleep: Idle, ADC Noise Reduction, Power-save, Power-down, dan
8. Antar muka komparator analog
9. Saluran I/O sebanyak 23 buah, yaitu Port A, Port B, Port C, dan Port D. 10. Unit interupsi internal dan eksternal
11. Programmable Serial USART 12. Master / Slave SPI Serial Interface
13. Power-on reset dan Deteksi Programmable Brown-out 14. Internal dikalibrasi RC Oscillator
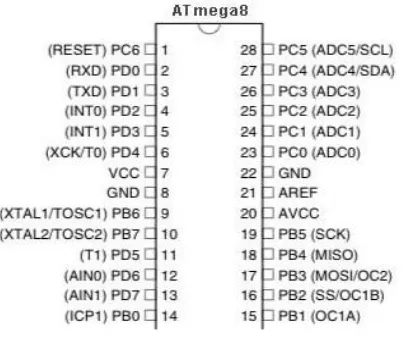
2.2.1.2 Penjelasan Fungsi PIN Mikrokontroler AVR ATmega8
IC mikrokontroler dikemas (packaging) dalam bentuk yang berbeda. Namun pada dasarnya fungsi kaki yang ada pada IC memiliki persamaan. Gambar salah satu bentuk IC seri mikrokontroler AVR Atmega 8 dapat dilihat pada gambar dibawah ini:
Gambar 2.3 Pin Atmega8 Berikut adalah penjelasan fungsi tiap kaki :
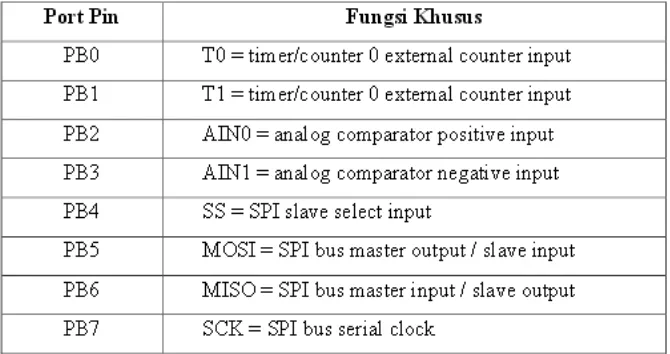
1) PORT B
Data Direction Register Port B (DDRB) harus disetting terlebih dahulu sebelum Port b digunakan. Bit-bit DDRB diisi 0 jika inginmemfungsikan pin-pin Port B bersesuaian sebagai input, atau diisi 1 jika sebagai output. Pin-pin Port B juga memiliki fungsi alternatif khusus seperti yang dapat dilihat dalam tabel konfigurasi pin Port B ATmega 8 berikut:
Tabel 2.1 Konfigurasi Pin Port B ATmega8 2) PORT C
Port C merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port C dapat memberi arus 20mA dan dapat mengendalikan display LED secara langsung.
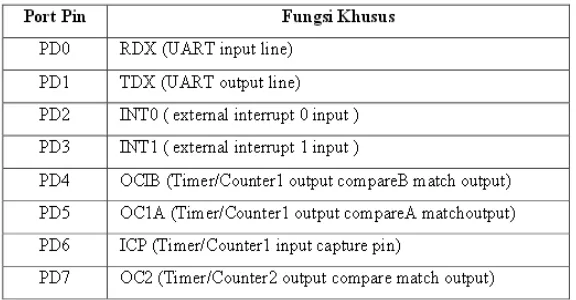
3) PORT D
Port D merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port D dapat member arus 20mA dan dapat mengendalikan display LED secara langsung.
Data Direction Register port D (DDRD) harus disetting terlebih dahulu sebelum Port D digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki untuk fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel konfigurasi pin Port D ATmega8 berikut:
Tabel 2.2 Konfigurasi Pin Port D ATmega8 4) RESET
RST pada pin 9 merupakan reset dari AVR. Jika pada pin ini diberi masukan selama 2 detik maka system akan di-reset.
5) XTAL1
XTAL1 adalah masukan ke inverting oscillator amplifier dan input ke internal clock operating circuit.
6) XTAL2
7) Avcc
Avcc adalah kaki masukan tegangan bagi A/D Converter. Kaki ini harus secara eksternal terhubung ke Vcc melalui lowpass filter.
8) AREF
AREF adalah kaki masukan referensi bagi A/D Converter. Untuk operasionalisasi ADC, suatu level tegangan antara AGND dan Avcc harus diberikan ke kaki ini.
9) AGND
AGND adalah kaki untuk analog ground. Hubungkan kaki ini ke GND, kecuali jika board memiliki anlaog ground yang terpisah.
2.3 Bahasa Basic menggunakan Code Vision AVR (CVAVR)
Perangkat lunak merupakan program yang meliputi bahasa pemrograman Code Vision AVR Evaluation (CVAVR) untuk pemrograman mikrokontroler Atmega8. CodeVisionAVR merupakan sebuah cross-compiler C, Integrated Development Environtment (IDE), dan Automatic Program Generator yang didesain untuk mikrokontroler buatan Atmel seri AVR. CodeVisionAVR dapat dijalankan pada sistem operasi Windows 95, 98, Me, NT4, 2000, dan XP. Cross-compiler C mampu menerjemahkan hampir semua perintah dari bahasa ANSI C, sejauh yang diijinkan oleh arsitektur dari AVR, dengan tambahan beberapa fitur untuk mengambil kelebihan khusus dari arsitektur AVR dan kebutuhan pada sistem embedded.
AVR Studio. IDE (Integrated Development Environtment) mempunyai fasilitas internal berupa software AVR Chip In-System Programmer yang memungkinkan anda untuk melakukan transfer program kedalam chip mikrokontroler setelah sukses melakukan kompilasi/asembli secara otomatis. Software In-System Programmer didesain untuk bekerja dengan Atmel STK500/AVRISP/AVR Prog, Kanda Systems STK200+/300, Dontronics DT006, Vogel Elektronik VTEC-ISP, Futurlec JRAVR dan MicroTronics ATCPU/Mega2000 programmers/ development boards.
2.4 LCD (Liquid Crystal Display)
LCD merupakan salah satu perangkat penampil yang sekarang ini banyak digunakan. Penampil LCD dapat menggantikan fungsi dari penampil CRT (Cathode Ray Tube), yang sudah berpuluh-puluh tahun digunakan manusia sebagai penampil gambar/text baik monokrom (hitam dan putih), maupun yang berwarna.Teknologi LCD memberikan keuntungan dibandingkan dengan teknologi CRT, kaena pada dasarnya, CRT adalah tabung triode yang digunakan sebelum transistor ditemukan.
Beberapa keuntungan LCD dibandingkan dengan CRT (Cathode Ray Tube) adalah konsumsi daya yang relative kecil, lebih ringan, tampilan yang lebih bagus, dan ketika berlama-lama di depan monitor, monitor CRT lebih cepat memberikan kejenuhan pada mata dibandingkan dengan LCD.
LCD memanfaatkan silicon atau gallium dalam bentuk kristal cair sebagai pemendar cahaya. Pada layar LCD, setiap matrik adalah susunan dua dimensi piksel yang dibagi dalam baris dan kolom. Dengan demikian, setiap pertemuan baris dan kolom adalah sebuah LED terdapat sebuah bidang latar (backplane), yang merupakan lempengan kaca bagian belakang dengan sisi dalam yang ditutupi oleh lapisan elektroda trasparan. Dalam keadaan normal, cairan yang digunakan memiliki warna cerah.
Daerah-daerah tertentu pada cairan akan berubah warnanya menjadi hitam ketika tegangan diterapkan antara bidang latar dan pola elektroda yang terdapat pad sisi dalam lempeng kaca bagian depan.
Lapisan film yang berisi kristal cair diletakkan di antara dua lempeng kaca yang telah ditanami elektroda logam transparan. Saat tegangan dicatukan pada beberapa pasang elektroda, molekul – molekul kristal cair akan menyusun diri agar cahaya yang mengenainya akan dipantulkan atau diserap. Dari hasil pemantulan atau penyerapan cahaya tersebut akan terbentuk pola huruf, angka, atau gambar sesuai bagian yang di aktifka.
bawah sinar cahaya yang remang-remang dalam kondisi gelap, sebuah lampu (berupa LED) harus dipasang dibelakang layar tampilan. LCD yang digunakan adalah jenis LCD yang menampilkan data dengan 2 baris tampilan pada display. Keuntungan dari LCD ini adalah :
1. Dapat menampilkan karakter, sehingga dapat memudahkan untuk membuat program tampilan.
2. Mudah dihubungkan dengan port I/O karena hanya mengunakan 8 bit data dan 3 bit control.
3. Ukuran modul yang proporsional yaitu 2x16 karakter 4. Daya yang digunakan relative sangat kecil yaitu 5 Volt DC
Gambar 2.5 Konfigurasi Pin LCD
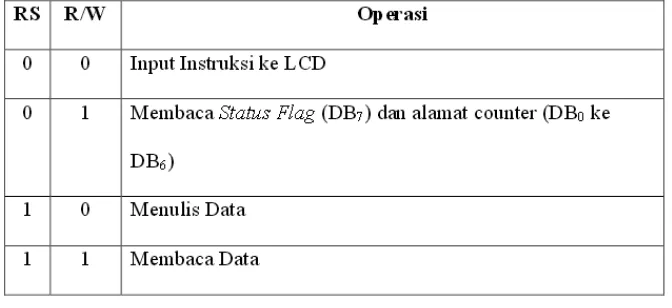
Tabel 2.3 Operasi Dasar LCD
LCD membutuhkan tegangan dan daya yang kecil sehingga sangat popular untuk aplikasi pada kalkulator, arloji digital, dan instrument elektronika lain seperti Global Positioning System (GPS), baragraph display dan multimeter digital. LCD umumnya dikemas dalam bentuk Dual In Line Package (DIP) dan mempunyai kemampuan untuk menampilkan beberapa kolom dan baris dalam satu panel. Untuk membentuk pola, baik karakter maupun gambar pada kolom dan baris secara bersamaan digunakan metode Screening.
BAB III
PERANCANGAN ALAT
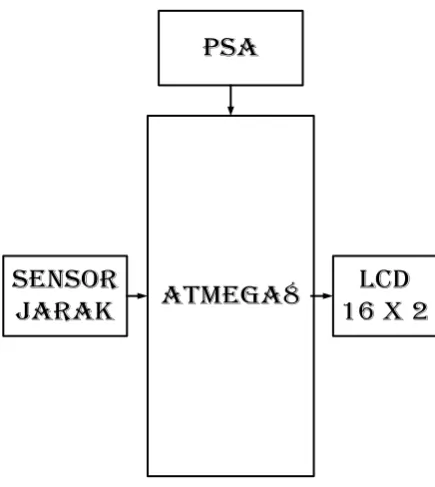
3.1 Diagram Blok Rangkaian
ATMEGA8
PSA
Sensor
Jarak
LCD
16 X 2
Gambar 3.1 Diagram Blok Rangkaian
3.1.1 Fungsi Tiap Blok
1. Atmega8 : Sebagai pengkonversi data dari sensor 2. Sensor Jarak : Sebagai sensor yang mendeteksi jarak 3. LCD : Sebagai output tampilan
3.2. Rangkaian Regulator
Gambar 3.2 Rangkaian Regulator IC LM7805
Pada rangkaian tersebut menggunakan baterai 9 volt, karena untuk menghemat biaya. Rangkaian mikrokontroler hanya membutuhkan tegangan sebesar 5 volt sedangkan baterai 9 volt, dari itu membutuhkan IC LM7805, agar tegangan yang di keluarkan 5 Volt. Di atas adalah adalah rangkaian penstabil tegangan.
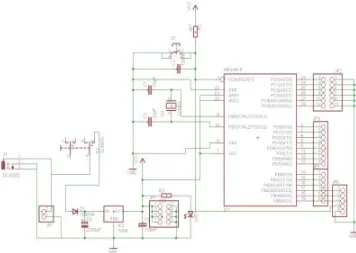
3.3. Rangkaian Mikrokontroller Atmega8
Dari gambar 3.3, rangkaian tersebut berfungsi sebagai pusat kendali. Komponen utama dari rangkaian ini adalah IC Mikrokontroler Atmega8. Semua program diisikan pada memori dari IC ini sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki.
Pin 12 dan 13 dihubungkan ke XTAL 11.0592 MHz dan dua buah kapasitor 30 pF. XTAL ini akan mempengaruhi kecepatan mikrokontroler Atmega8 dalam mengeksekusi setiap perintah dalam program. Pin 9 merupakan masukan reset (aktif rendah). Pulsa transisi dari tinggi ke rendah akan me-reset mikrokontroler ini.
Untuk men-download file heksadesimal ke mikrokontroler, Mosi, Miso, Sck, Reset, Vcc dan Gnd dari kaki mikrokontroler dihubungkan ke Jack 10 Pin header sebagai konektor yang akan dihubungkan ke ISP Programmer. Dari ISP Programmer inilah dihubungkan ke komputer melalui port paralel.
Kaki Mosi, Miso, Sck, Reset, Vcc dan Gnd pada mikrokontroler terletak pada kaki 6, 7, 8, 9, 10 dan 11. Apabila terjadi keterbalikan pemasangan jalur ke ISP Programmer, maka pemograman mikrokontroler tidak dapat dilakukan karena mikrokontroler tidak akan bisa merespon.
3.4 Rangkaian LCD
Pemasangan potensiometer sebesar 10 KΩ untuk mengatur kontras karakter yang tampil. Gambar 3.4 berikut merupakan gambar rangkaian LCD yang dihubungkan ke mikrokontroler.
Dari gambar 3.4, rangkaian ini terhubung ke PD.5, PD.6, PD.7, PB.0, PB.1 , PB.2 , PB.3 yang merupakan pin I/O dua arah dan pin fungsi khusus, yaitu sebagai Timer/Counter, komperator analog dan SPI mempunyai fungsi khusus sebagai pengiriman data secara serial. Sehingga nilai yang akan tampil pada LCD display akan dapat dikendalikan oleh Mikrokontroler Atmega8.
3.5. Rangkaian Sensor Jarak
Gambar 3.5 Rangkaian Sensor Jarak
Sharp GP2D12 adalah sensor jarak analog yang menggunakan infrared untuk mendeteksi jarak antara 10 cm sampai 80 cm. GP2D12 mengeluarkan output voltase non-linear dalam hubungannya dengan jarak objek dari sensor dan menggunakan interface analog to digital converter (ADC).
Sensor jarak Sharp banyak dipilih untuk proyek yang membutuhkan
pengukuran jarak akurat. Sensor ini lebih ekonomis, tapi memberikan kinerja
yang jauh lebih baik daripada alternatif IR lainnya.
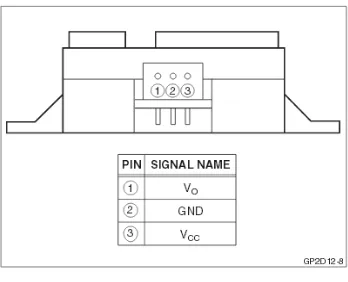
Sensor ini memiliki 3-pin, Voltage, Ground, Signal. Output sensor ini
adalah analog tunggal, dapat terhubung ke sebuah konverter analog ke-digital
untuk mengambil pengukuran jarak, atau output dapat dihubungkan ke
comparator untuk deteksi ambang batas. Jangkauan deteksi versi ini adalah sekitar
3.6 Diagram Alir Pemrograman
Mulai
Insialising
Selesai Sensor Deteksi
Jarak
Konversi Analog To Digital
Tampil Data Di LCD
BAB IV
IMPLEMENTASI SISTEM
4.1 Pengujian LM7805 Sebagai Regulator
Gambar 4.1 LM7805
Tabel 4.1 Konfigurasi Pin LM7805
Regulator ini menghasilkan tegangan output stabil 5 Volt dengan syarat tegangan input yang diberikan minimal 7-8 Volt (lebih besar dari tegangan output)
Pin
No
Function Name
1 Input voltage (5V-18V) Input
2 Ground (0V) Ground
sedangkan batas maksimal tegangan input yang diperbolehkan dapat dilihat pada datasheet IC 78XX karena jika tidak maka tegangan output yang dihasilkan tidak akan stabil atau kurang dari 5 Volt.
4.2 Pengujian Rangkaian Mikrokontroler Atmega8
Karena pemrograman menggunakan mode ISP (In System Programming) mikrokontroler harus dapat diprogram langsung pada papan rangkaian dan rangkaian mikrokontroler harus dapat dikenali oleh program downloader. Pada pengujian ini berhasil dilakukan dengan dikenalinya jenis mikrokontroler oleh program downloader yaitu Atmega8.
Gambar 4.2 Informasi Signature Mikrokontroler
4.3. Interfacing LCD 2x16
Bagian ini hanya terdiri dari sebuah LCD 2 x 16 karakter yang berfungsi sebagai tampilan hasil pengukuran dan tampilan dari beberapa keterangan. LCD dihubungkan langsung ke Port D dari mikrokontroler yang berfungsi mengirimkan data hasil pengolahan untuk ditampilkan dalam bentuk alfabet dan numerik pada LCD.Display karakter pada LCD diatur oleh pin EN, RS dan RW: Jalur EN dinamakan Enable. Jalur ini digunakan untuk memberitahu LCD bahwa anda sedang mengirimkan sebuah data. Untuk mengirimkan data ke LCD, maka melalui program EN harus dibuat logika low “0” dan set ( high ) pada dua jalur kontrol yang lain RS dan RW. Jalur RW adalah jalur kontrol Read/ Write. Ketika RW berlogika low (0), maka informasi pada bus data akan dituliskan pada layar LCD. Ketika RW berlogika high ”1”, maka program akan melakukan pembacaan
memori dari LCD. Sedangkan pada aplikasi umum pin RW selalu diberi logika low ( 0 )
PORTB=0x00; diaktifkan, maka pada LCD akan menampilkan status sensor dan emberitahuan apabila menerima sms .
4.4 Pengujian Sensor Jarak
#include <delay.h>
// Alphanumeric LCD Module functions #include <alcd.h>
#include <stdio.h>
#define ADC_VREF_TYPE 0x60 // Read the 8 most significant bits // of the AD conversion result
unsigned char read_adc(unsigned char adc_input) {
ADMUX=adc_input | (ADC_VREF_TYPE & 0xff);
// Delay needed for the stabilization of the ADC input voltage delay_us(10);
// Start the AD conversion ADCSRA|=0x40;
read_adc(0)) – 6.2304); //read_adc(0) membaca nilai analog dari PINA0
//nilai ADC sudah dikonversi dengan mengalikan konstanta yang dibagi dengan perbandingan konversi ADC return jarak;
}
// Declare your global variables here void main(void)
fungsi sprinf
lcd_clear(); //membersihkan layar LCD
lcd_gotoxy(0,0); //mengatur kursor LCD menuju koordinat 0,0 lcd_puts(kata); //mengirim data LCD
delay_ms(300); //delay agar perubahan dari lcd_clear tidak terlalu cepat
} }
program ini digunakan untuk mengkonversikan tegangan atau sinyal analog ke sinyal digital dengan resulusi 10 bit.
4.5 Data Pengujian Alat
Pengujian
Jarak Praktek
(Sp)
Jarak Teori/Standar
(St)
1 21,1 cm 21,5 cm
2 15,1 cm 15,3 cm
3 10,6 cm 10,5 cm
4.5.1 Menentukan % Ralat pada Pengujian Alat
* Pengujian 1
%Ralat = x 100%= x 100% = 1,896%
*Pengujian 2
%Ralat = x 100%= x 100% = 1,325%
*Pengujian 3
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
1. Sensor Sharp GP2D12 merupakan sensor infra merah yang secara umum dapat mendeteksi jarak dengan jangkauan 10 cm – 80 cm, namun setelah dilakukan perancangan alat dan dilakukan pemrograman, sensor tersebut hanya dapat menjangkau jarak 10 cm – 30 cm dikarenakan adanya keterbatasan dari sensor itu sendiri.
2. LCD baik digunakan karena memiliki keunggulan yaitu menarik arus yang kecil, sehingga alat atau sistem menjadi portable karena dapat menggunakan catu daya yang kecil, tampilan yang diperlihatkan dapat dibaca dengan mudah di bawah terang sinar matahari. Di bawah sinar cahaya yang remang-remang dalam kondisi gelap, sebuah lampu (berupa LED) harus dipasang dibelakang layar tampilan. LCD yang digunakan adalah jenis LCD yang menampilkan data dengan 2 baris 16 karakter tampilan pada display
5.2 Saran
1. Alat pengukur jarak ini sangat sensitif, maka dari itu lebih berhati-hati dalam melakukan perancangan alat dan ketika melakukan pengukuran, benda yang akan diukur dikondisikan dalam keadaan benar-benar diam sehingga data yang dihasilkan akurat/terbukti kebenarannya.
DAFTAR PUSTAKA
Ibrahim, KF. 2002. Teknik Digital. Penerbit: ANDI Yogyakarta Muis, Saludin. 2007. Teknik Digital Dasar. Penerbit: Graha Ilmu http://komponenelektronika.biz/sensor-jarak-dengan-infrared.html
http://komponenelektronika.biz/jenis-jenis-sensor.html