LAPORAN KERJA PRAKTIK
RANCANG BANGUN MOBILE CARRIER OF
RADIOACTIVE SOURCE UNTUK
PENGUJIAN PORTAL MONITOR RADIASI
TIRTA JAYADIHARJA
102116009
FAKULTAS TEKNOLOGI INDUSTRI
PROGRAM STUDI TEKNIK ELEKTRO
UNIVERSITAS PERTAMINA
JAKARTA, 2019
RANCANG BANGUN MOBILE CARRIER OF RADIOACTIVE
SOURCE UNTUK PENGUJIAN PORTAL MONITOR
RADIASI
LAPORAN KERJA PRAKTIK
Oleh:
Tirta Jayadiharja
102116009
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PERTAMINA
2019
*.'l
ILEMBAR
PERSETUJUAN
LAPORAN KERJA
PRAKTIK
Judul Kerja Praktik
Nama Mahasiswa
Nomor Induk Mahasiswa Program Studi
Fakultas
Tanggal Seminar
Pernbimbing Instansr
Rancang Bangun
Mobile Carrier
of
Radioactive Source untuk Pengujian Portal Monitor RadiasiTirta Jayadiharja 102t16009 Teknik Elektro Teknologi Industri Jakarta, .1r....*pFn
hf
?g
MENYETUruI,
CM,
Dian Fitri Atmoko. ST.
iii
KATA PENGANTAR
Puji syukur penulis panjatkan kehadirat Allah SWT yang telah memberikan semua limpahan serta rahmat-Nya kepada kita semua, sehingga penulis dapat meyelesaikan tugas penelitian kerja praktIk yang berjudul Rancang Bangun Mobile Carrier of Radioactive Source untuk Pengujian Portal Monitor Radiasi. Penulis menyadari bahwa penulisan ini tidak lepas dari bimbingan, bantuan, dan dukungan dari berbagai pihak.
Semoga laporan ini dapat bermanfaat bagi pembaca pada umumnya dan penulis pada khususnya, menyadari bahwa dalam pembuatan laporan ini masih jauh dari sempurna. Maka dari itu penulis sangat mengharapkan saran dan kritik yang membangun dari pembaca. Atas perhatiannya penulis mengucapkan terimakasih.
Jakarta, Agustus 2019
iv
DAFTAR ISI
LEMBAR PERSETUJUAN ... ii
KATA PENGANTAR ... iii
DAFTAR ISI ... iv DAFTAR GAMBAR ... v DAFTAR TABEL ... v BAB I ...1 PENDAHULUAN ...1 1.2. Tujuan ...2
1.3. Tempat dan Waktu Pelaksanaan ...2
1.4. Manfaat...2 BAB II ...3 PROFIL INTANSI ...3 Sejarah ...3 Visi ...3 Misi ...3
Tugas dan Tujuan...3
Tujuan ...4
BAB III ...5
KEGIATAN KERJA PRAKTIK ...5
BAB IV ...6
HASIL KERJA PRAKTIK ...6
BAB V ... 27 TINJAUAN TEORIS ... 27 5.1. Arduino Uno ... 27 5.2. 4-Channel Relay ... 27 5.3. HC-SR04 ultrasonic module ... 28 BAB VI ... 30
KESIMPULAN DAN SARAN ... 30
DAFTAR PUSTAKA ... 31
v
DAFTAR GAMBAR
Gambar 3. 1. Mobile carrier of radioactive source ...5
Gambar 4. 1 hardware diagram block...6
Gambar 4. 2. 4-channel relay module ...6
Gambar 4. 3. HC-sr04 module ...7
Gambar 4. 4. HC-05 module ...7
Gambar 4. 5. Simulation hardware sketch ...7
Gambar 4. 6. Controller flowchart ...8
Gambar 4. 7. PWM in action ...9
Gambar 4. 8. Controller application ...9
Gambar 4. 9. Mobile carrier of radioactive source controller ... 10
Gambar 5. 1. Arduino uno ... 27
Gambar 5. 2. 4-Channel relay board ... 28
Gambar 5. 3. HC-sr04 ultrasonic module ... 28
vi
DAFTAR TABEL
Tabel 4. 1 Hasil percobaan sumbu vertikal ... 26 Tabel 4. 2 Hasil percobaan sumbu horizontal ... 26
1
BAB I
PENDAHULUAN
1.1.
Latar Belakang
Pada dunia industri, perkembangan ilmu pengetahuan dan teknologi semakin berkembang pesat, sehingga perlu diimbangi dengan sumber daya manusia kreatif serta berkompeten agar mampu menghadapi era globalisasi dengan penuh persaingan. Oleh karna itu, Universitas Pertamina didirikan dengan tujuan menciptakan sumber daya manusia yang terampil, berintegritas, profesional dalam ilmu pengetahuan dan teknologi sehingga dapat menjadi bekal dalam dunia kerja nantinya. Pendidikan saat perkuliahan baik secara teori maupun praktik diharapkan dapat membentuk keterampilan mahasiswa untuk mempersiapkan diri menuju dunia kerja. Namun, tidak hanya menguasai ilmu pengetahuan yang bersifat teoritis saja tetapi juga dapat mengimplementasikan kedalam aplikasi sebenarnya.
Kerja praktik merupakan salah satu mata kuliah wajib di Universitas Pertamina. Mata kuliah tersebut mengharuskan mahasiswa untuk melakukan kerja praktik/magang di suatu instansi yang sesuai dengan minat mahasiswa. Melalui mata kuliah ini juga mahasiwa diharapakan dapat menambah wawasan dan pengalaman serta mampu menyelesaikan suatu masalah yang terjadi di dunia kerja. Kerjasama antara perusahaan dengan perguruan tinggi perlu terus ditingkatkan, supaya standar akademik dapat mengikuti perkembangan dunia industri dan mampu menciptakan mahasiswa yang handal dibidang teknologi, sehingga menjadi nilai tambah bagi perusahaan, bangsa, dan Negara.
Program studi Teknik Elektro, Fakultas Teknologi Industri, Universitas Pertamina merupakan salah satu program studi yang berfokus pada bidang rekayasa, terutama rekayasa energi listrik. Tujuan program studi Teknik Elektro Universitas Pertamina adalah menghasilkan lulusan yang memiliki kompetensi dan profesionalisme di bidang teknik elektro. Berdasarkan tujuan tersebut mahasiswa teknik elektro dibekali dengan berbagai ilmu dasar sistem kelistrikan dan ilmu terapan yang bermanfaat serta menunjang teknologi industri dan energi terbarukan berskala nasional maupun internasional.
Melalui kerja praktik ini diharapkan mahasiswa dapat menambah wawasan terhadap dunia kerja dan memiliki gambaran tentang kebutuhan dunia kerja di industri saat ini. Adapun proposal ini ditujukan untuk memberikan gambaran sampai sejauh mana mahasiswa calon peserta kerja praktik Universitas Pertamina memahami hal-hal yang akan dilakukan di Badan Tenaga Nuklir Nasional (BATAN) yang berkaitan dengan proses industri, riset, Keselamatan dan kesehatan kerja (K3), dan lain-lain.
Kerja praktik ini diharapkan dapat memberikan hubungan timbal balik yang bermanfaat bagi mahasiswa yang melakukan kerja praktik, perguruan tinggi selaku lembaga pendidikan dan instansi yang terkait. Pengalaman beserta segala ilmu pengetahuan yang diperoleh selama kerja praktik dapat menjadi tambahan ilmu pengetahuan yang mungkin tidak deperoleh dari bangku perkuliahan dan dapat menjadi bekal mahasiswa di kemudian hari. Kerja praktik ini mengambil topik dengan judul Rancang Bangun Mobile Carrier of Radioactive Source untuk Pengujian Portal Monitor Radiasi.
2
1.2.
Tujuan
Tujuan Kerja praktik ini adalah untuk memenuhi persyaratan kurikulum program studi Teknik Elektro di Universitas Pertamina, dan setiap mahasiswa diwajibkan untuk melaksanakan kerja praktik dengan tujuan sebagai berikut:
a. Agar mahasiswa mendapatkan pengalaman kerja yang sesuai dengan dunia kerja yang akan dimasuki selepas bangku kuliah.
b. Menambah ilmu pengetahuan dan wawasan mengenai teknologi yang kemungkinan hanya didapatkan ketika terjun langsung ke dunia kerja.
c. Membandingkan dan menerapkan pengetahuan akademis yang telah diperoleh di bangku kuliah dengan di dunia kerja.
d. Lebih memahami konsep-konsep non-akademik dan non-teknis di dunia kerja nyata, seperti hubungan antara atasan dan bawahan, hubungan sesame mitra kerja, ketidak pastian dan ketidak konsistenan spesifikasi serta penerapan di lapangan yang terkadang tidak sesuai dengan teori akademis;
1.3.
Tempat dan Waktu Pelaksanaan
Kerja praktik dilaksanakan pada tanggal 24 Juni 2019 – 28 Juli 2019 di Bidang Instrumentasi, Pusat Rekayasa Fasilitas Nuklir (PRFN) - BATAN Kawasan PUSPIPTEK, Serpong, Tangerang Selatan, Banten.
1.4.
Manfaat
Pada kerja praktik diperoleh manfaat bagi mahasiswa dan instansi, yaitu:
a. Mahasiswa mendapatkan pengalaman untuk terjun langsung di dunia kerja.
b. Mahasiswa memperoleh ilmu yang tidak dapat diperoleh ketika duduk di bangku kuliah. c. Mahasiswa dapat menerapkan ilmu dan pengalaman yang diperoleh ketika berkuliah di
dunia kerja;
Menambah relasi dan hubungan baik antara mahasiswa dengan pembimbing, mahasiswa dengan kolega, dan mahasiswa dengan mahasiswa kerja praktik yang lain.
3
BAB II
PROFIL INTANSI
Sejarah
Sejarah perkembangan Pusat Rekayasa Fasilitas Nuklir – BATAN (PRFN), dahulu Pusat Rekayasa Fasilitas Nuklir pertama dibentuk bernama Pusat Perangkat Nuklir dan Rekayasa, pada tahun 1999 PPNR berubah nama menjadi Pusat Pengembangan Perangkat Nuklir dengan tugas melakukan pembinaan dan pengembangan teknologi di bidang perangkat nuklir dan pada tahun 2014 berubah nama struktur organisasi dengan nama Pusat Rekayasa Fasilitas Nuklir sampai dengan sekarang dengan tugas melakukan perumusan dan pengendalian kebijakan teknis, pelaksanaan, dan pembinaan dan bimbingan di bidang perekayasaan instrumentasi, elektromekanik dan kendali, mekanik, struktur, dan proses fasilitas nuklir [1].
Visi
Untuk di lingkup BATAN tetapi harus sampai pada pengguna akhir dan manfaatnya dirasakan oleh masyarakat [1].
Misi
Dalam mewujudkan Visi BATAN 2015-2019, Deputi PTN telah menetapkan lima Misi. Di antara kelima Misi tersebut, PRFN mendukung secara langsung pelaksanakan dua Misi Deputi PTN sebagai berikut:
a. Mengembangkan perekayasaan fasilitas nuklir dan pendayagunaan teknologi produksi radioisotop dan radiofarmaka yang memenuhi persyaratan pemangku kepentingan.
b. Meningkatkan pemenuhan kepuasan pemangku kepentingan melalui layanan prima pemanfaatan iptek nuklir;
Selanjutnya, dukungan pada ke-dua Misi di atas dapat dijabarkan dan diformulasikan ke dalam Misi PRFN sebagai berikut:
a. Mengembangkan dan melakukan perekayasaan fasilitas nuklir secara profesional, berkelanjutan dan bermanfaat bagi masyarakat
b. Memperkuat sistem manajemen kelembagaan dan kompetensi bidang instrumentasi, bidang elektromekanik dan kendali, serta mekanik, struktur dan proses untuk mendukung kegiatan perekayasaan fasilitas nuklir.
c. Meningkatkan pemenuhan kepuasan pemangku kepentingan melalui layanan prima pemanfaatan iptek nuklir;
Tugas dan Tujuan
Sebagaimana dijabarkan pada pasal 267 Peraturan Kepala BATAN No. 14 Tahun 2013 tentang Organisasi dan Tata Kerja Badan Tenaga Nuklir Nasional, PRFN adalah satu-satunya Unit Kerja di yang diberikan oleh Deputi Bidang Pendayagunaan Teknologi Nuklir [1].
4
Tujuan
Tujuan yang ingin dicapai oleh BATAN periode 2015-2019 dirumuskan berdasarkan hasil identifikasi potensi, permasalahan, peluang dan ancaman yang akan dihadapi BATAN selama lima tahun ke depan dalam rangka mewujudkan visi dan melaksanakan misinya. Tujuan yang dirumuskan mencerminkan kondisi yang ingin dicapai BATAN pada jangka menengah melalui pelaksanaan misinya. Tujuan BATAN 2015-2019 tersebut adalah:
a. Terwujudnya BATAN sebagai lembaga unggulan iptek nuklir di tingkat regional. b. Peningkatan peran iptek nuklir dalam mendukung pembangunan nasional menuju
5
BAB III
KEGIATAN KERJA PRAKTIK
Pada kegiatan kerja praktik yang telah dilaksanakan dilakukan rancang dan bangun sebuah kontroler pada alat mobile carrier of radioactive source untuk pengujian portal monitor radiasi. Berikut adalah gambar alat mobile carrier of radioactive source.
Gambar 3. 1. Mobile carrier of radioactive source
Mobile carrier of radioactive source adalah alat yang dapat digerakan pada sumbu vertikal dan horizontal. Pada sumbu vertikal kecepatan motor tidak dapat atur dan pada sumbu horizontal kecepatan motor dapat di atur. Penggunaan Arduino pada sistem kontrol Mobile carrier of radioactive source digunakan untuk menggendalikan motor pada sumbu vertikal dan horizontal dengan pengendalian nirkabel.
6
BAB IV
HASIL KERJA PRAKTIK
Rancang dan bangun sebuah kontroler pada alat mobile carrier of radioactive source menggunakan Arduino sebagai microcontroller. Pada kendali nirkabel digunakan Bluetooth dan dikendalikan melalui handphone dengan android operation system. Berikut adalah blok diagram hardware yang telah dibuat.
Gambar 4. 1 hardware diagram block
Pada micromodule adalah sebuah pengatur sistem yang dibuat, dimana micromodule yang dipakai adalah Arduino Nano. DC power adalah sistem yang mengeluarkan arus DC dan tengan DC yang digunakan untuk menjalankan micromodule, DC motor driver dan relay module.
Pada pengaturan motor untuk menggerakan lengan sumbu vertikal dan horizontal digunakan modul relay untuk mengatur motor berputar searah jarum jam atau berputar berlawanan jarum jam. Berikut adalah modul relay yang digunakan.
7
Pada pengaturan motor sumbu vertikan untuk membaca ketinggian lengan bergerak digunakan modul HC-sr04 yaitu sensor ultrasonic. Berikut adalah sensor ultrasonic yang digunakan.
Gambar 4. 3.HC-sr04 module [2]
Pada kendali nirkabel yang memanfaatkan komunikasi bluetooth menggunakan modul HC-05. Berikut adalah modul Bluetooth yang digunakan.
Gambar 4. 4.HC-05 module [2]
Pada proximity sensor adalah sensor pendeteksi logam dimana akan didapatkan nilai jika di dekatkan pada logam dengan jarak tertentu. Pembacaan dari sensor tersebut diubah menjadi kecepatan. Berikut adalah simulation hardware sketch yang telah dibuat.
8
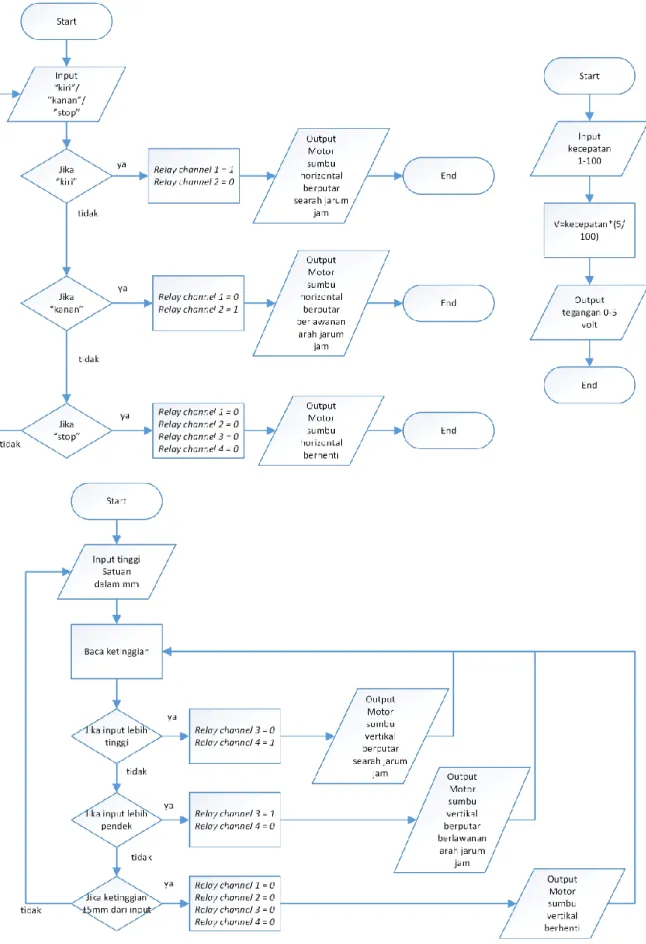
Berikut adalah flowchart dari sistem yang telah dibuat.
9
Berdasarkan flowchart tersebut sistem yang dibuat menjelaskan bahwa kendali motor horizontal bersifat manual dengan kata lain motor akan berputar jika ditekan perintah kiri atau kanan dan akan berhenti jika ditekan perintah stop. Pada perintah kecepatan akan mengeluarkan tegangan PWM 0-5 volt yang digunakan untuk mengaktifkan kecepatan motor horizontal.
Pin PWM adalah pin yang dapat mengeluarkan sinyal DC yang diubah kedalam bentuk sinyal AC yang bertujuan untuk menurunkan tegangan keluaran dari pin tersebut. Berikut adalah gambar sinyal keluaran PWM.
Gambar 4. 7. PWM in action [3]
Pada perintah motor vertikan bersifat otomatis dengan kata lain input nilai ketinggian akan mengatur motor vertikal secara otomatis akan maju atau mundur dan akan berhenti jika nilai input sama dengan ±5mm nilai ketingian sebenarnya.
Aplikasi kendali dibuat menggunakan Android Studio. Aplikasi tersebut dibuat dengan bluetooth interconnection dan dengan minimal operation system yaitu Android 4.1 (Jelly Bean). Berikut adalah tampilan aplikasi yang telah dibuat.
10
Berikut adalah hardware kontroler alat mobile carrier of radioactive source yang telah dibuat.
Gambar 4. 9. Mobile carrier of radioactive source controller
Berikut adalah script yang telah dibuat pada aplikasi Arduino.
#include <EEPROM.h> #define TRIGGER 8 #define ECHO 7 int jarak = 0; bool maju = true; bool mundur = false; int addr = 0; int CN1 = 1; int CN2 = 2; int CN3 = 3; void setup() { Serial.begin(9600);
11
pinMode(10, OUTPUT); //Motor pinMode(11, OUTPUT); //Motor pinMode(12, OUTPUT); //Motor pinMode(3, OUTPUT); //PWM pinMode(2, INPUT); //Proximity pinMode(TRIGGER, OUTPUT); pinMode(ECHO, INPUT); }
void loop() {
while ( Serial.available()){
String Tulis = Serial.readString(); int TulisIn= Tulis.toInt();
EEPROM.write(addr, TulisIn); int Baca = EEPROM.read (addr); parseCommand(Tulis); delay(1000); } //tinggi bacaJarak(); int Setpoin=EEPROM.read(CN2); atur(Setpoin); //kecepatan proximity(); }
void parseCommand(String com) {
12 String part1; String part2; String part3; int part4; int part5;
part1 = com.substring(com.indexOf("N") + 1,com.indexOf("N") + 2);
part2 = com.substring(com.indexOf("N") + 2,com.indexOf("N") + 3); part3 = com.substring(com.indexOf("N") + 3); if (part1=="1"){ if(part2=="f") { jalankanX (maju); } if(part2=="b") { jalankanX (mundur); } if(part2=="s") { berhenti(); } } if (part1=="2"){
part4 = com.substring(com.indexOf("N") +2,7).toInt(); int part=part4;
13 int Baca4=EEPROM.read(CN2); atur(Baca4); } if (part1=="3") {
// part PWM for Speed 0V-5V or 0-255
part5 = com.substring(com.indexOf("N") +2,6).toInt(); Serial.print(part5);
int pwm= part5*(255/100); analogWrite(3, pwm); }
}
void jalankanY(bool direct) { if(direct) { digitalWrite(11, HIGH); digitalWrite(12, LOW); } else { digitalWrite(11, LOW); digitalWrite(12, HIGH); } }
14 { if(direct) { digitalWrite(9, HIGH); digitalWrite(10, LOW); } else { digitalWrite(9, LOW); digitalWrite(10, HIGH); } } void berhenti(){ digitalWrite(9, LOW); digitalWrite(10, LOW); digitalWrite(11, LOW); digitalWrite(12, LOW); bacaJarak(); int part4=jarak; EEPROM.write(CN2, part4); } void bacaJarak() {
long duration, distance; digitalWrite(TRIGGER, LOW);
15 delayMicroseconds(2); digitalWrite(TRIGGER, HIGH); delayMicroseconds(10); digitalWrite(TRIGGER, LOW); duration = pulseIn(ECHO, HIGH); distance = ((duration/2) / 29.1); jarak = distance;
delay(500); }
void atur(int tinggi_cm) {
bacaJarak();
if (jarak>=tinggi_cm) {
if (jarak<=tinggi_cm+1 and jarak>=tinggi_cm-1) {berhenti();} else {jalankanY (mundur);}
}
if (jarak<=tinggi_cm) {
if (jarak<=tinggi_cm+1 and jarak>=tinggi_cm-1) {berhenti();} else {jalankanY (maju);}
} }
void proximity() {
16
int H_time; //variabel untuk menyimpan high time int L_time; //variabel untuk menyimpan low time float T_time; // variabel untuk menyimpan total time float freq; H_time=pulseIn(2,HIGH); L_time=pulseIn(2,LOW); T_time = H_time+L_time;
freq=1000000/T_time; //getting frequency with Ttime is in Micro seconds //lcd.setCursor(00,1); Serial.print(freq); int PPM=freq*60; Serial.print(PPM); Serial.println(" PPM"); delay(1000); }
Berikut adalah script yang telah dibuat pada aplikasi Android Studio.
package com.current.tirta.simplebluetooth; import android.bluetooth.BluetoothAdapter; import android.bluetooth.BluetoothDevice; import android.bluetooth.BluetoothSocket; import android.content.BroadcastReceiver; import android.content.Context; import android.content.Intent; import android.content.IntentFilter; import android.os.Handler; import android.os.SystemClock; import android.support.v7.app.AppCompatActivity; import android.os.Bundle; import android.view.View; import android.widget.AdapterView; import android.widget.ArrayAdapter; import android.widget.Button;
17 import android.widget.CheckBox; import android.widget.EditText; import android.widget.ListView; import android.widget.SeekBar; import android.widget.TextView; import android.widget.Toast; import java.io.IOException; import java.io.InputStream; import java.io.OutputStream; import java.io.UnsupportedEncodingException; import java.util.Set; import java.util.UUID;
public class MainActivity extends AppCompatActivity {
// GUI Components
private TextView mBluetoothStatus;
private TextView mReadBuffer;
private Button mScanBtn;
private Button mOffBtn;
private Button mListPairedDevicesBtn;
private Button mDiscoverBtn;
private Button mHidup;
private Button mMati;
private Button mSetStop;
private Button mSetStart;
private Button mOktinggi;
private BluetoothAdapter mBTAdapter;
private Set<BluetoothDevice> mPairedDevices;
private ArrayAdapter<String> mBTArrayAdapter;
private ListView mDevicesListView;
private CheckBox mLED1;
EditText speed; TextView text_view; SeekBar seek_bar; int progress_value=0;
private Handler mHandler; // Our main handler that will
receive callback notifications
private ConnectedThread mConnectedThread; // bluetooth
background worker thread to send and receive data
private BluetoothSocket mBTSocket = null; // bi-directional
client-to-client data path
private static final UUID BTMODULEUUID =
UUID.fromString("00001101-0000-1000-8000-00805F9B34FB"); // "random" unique identifier
// #defines for identifying shared types between calling functions
private final static int REQUEST_ENABLE_BT = 1; // used to
identify adding bluetooth names
private final static int MESSAGE_READ = 2; // used in
bluetooth handler to identify message update
private final static int CONNECTING_STATUS = 3; // used in
18
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState); setContentView(R.layout.activity_main); mBluetoothStatus =
(TextView)findViewById(R.id.bluetoothStatus);
mReadBuffer = (TextView) findViewById(R.id.readBuffer); mScanBtn = (Button)findViewById(R.id.scan); mOffBtn = (Button)findViewById(R.id.off); mDiscoverBtn = (Button)findViewById(R.id.discover); mListPairedDevicesBtn = (Button)findViewById(R.id.PairedBtn); speed = (EditText)findViewById(R.id.ketinggian); mHidup = (Button) findViewById(R.id.hidup); mSetStop = (Button) findViewById(R.id.setstop); mSetStart = (Button) findViewById(R.id.setstart); mOktinggi = (Button) findViewById(R.id.Oktinggi); mBTArrayAdapter = new
ArrayAdapter<String>(this,android.R.layout.simple_list_item_1); mBTAdapter = BluetoothAdapter.getDefaultAdapter(); // get a handle on the bluetooth radio
mDevicesListView = (ListView)findViewById(R.id.devicesListView); mDevicesListView.setAdapter(mBTArrayAdapter); // assign model to view mDevicesListView.setOnItemClickListener(mDeviceClickListener); seekbarr();
mHandler = new Handler(){
public void handleMessage(android.os.Message msg){ if(msg.what == MESSAGE_READ){
String readMessage = null; try {
readMessage = new String((byte[]) msg.obj,
"UTF-8"); } catch (UnsupportedEncodingException e) { e.printStackTrace(); } mReadBuffer.setText(readMessage); } if(msg.what == CONNECTING_STATUS){ if(msg.arg1 == 1) mBluetoothStatus.setText("Connected to Device: " + (String)(msg.obj)); else mBluetoothStatus.setText("Connection Failed"); } } };
19
if (mBTArrayAdapter == null) {
// Device does not support Bluetooth
mBluetoothStatus.setText("Status: Bluetooth not found");
Toast.makeText(getApplicationContext(),"Bluetooth device not found!",Toast.LENGTH_SHORT).show();
} else {
mHidup.setOnClickListener(new View.OnClickListener(){ @Override
public void onClick(View v){
if(mConnectedThread != null) //First check to make sure thread created
mConnectedThread.write("CN1fxa"); } }); mSetStart.setOnClickListener(new View.OnClickListener(){ @Override
public void onClick(View v){
if(mConnectedThread != null) //First check to make sure thread created
mConnectedThread.write("CN1bxa"); } }); mSetStop.setOnClickListener(new View.OnClickListener(){ @Override
public void onClick(View v){
if(mConnectedThread != null) //First check to make sure thread created
mConnectedThread.write("CN1sxa");// 2 disetel buat berhenti
} });
final Button next = (Button)findViewById(R.id.lanjut); next.setOnClickListener(new View.OnClickListener() { @Override
public void onClick(View view) {
if(mConnectedThread != null) //First check to make sure thread created
mConnectedThread.write("CN3"+String.valueOf(progress_value)+"a");/ / 2 disetel buat berhenti
} });
mOktinggi.setOnClickListener(new
View.OnClickListener(){ @Override
public void onClick(View v){
if(mConnectedThread != null) { //First check to make sure thread created
20
String.valueOf(speed.getText()) + "a");// 2 disetel buat berhenti }
} });
mScanBtn.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View v) { bluetoothOn(v);
} });
mOffBtn.setOnClickListener(new View.OnClickListener(){ @Override
public void onClick(View v){ bluetoothOff(v); } }); mListPairedDevicesBtn.setOnClickListener(new View.OnClickListener() { @Override
public void onClick(View v){ listPairedDevices(v); } }); mDiscoverBtn.setOnClickListener(new View.OnClickListener(){ @Override
public void onClick(View v){ discover(v);
} }); }
}
private void bluetoothOn(View view){
if (!mBTAdapter.isEnabled()) { Intent enableBtIntent = new
Intent(BluetoothAdapter.ACTION_REQUEST_ENABLE); startActivityForResult(enableBtIntent, REQUEST_ENABLE_BT);
mBluetoothStatus.setText("Bluetooth enabled"); Toast.makeText(getApplicationContext(),"Bluetooth turned on",Toast.LENGTH_SHORT).show();
} else{
Toast.makeText(getApplicationContext(),"Bluetooth is already on", Toast.LENGTH_SHORT).show();
} }
21
// Enter here after user selects "yes" or "no" to enabling radio
@Override
protected void onActivityResult(int requestCode, int
resultCode, Intent Data){
// Check which request we're responding to if (requestCode == REQUEST_ENABLE_BT) { // Make sure the request was successful if (resultCode == RESULT_OK) {
// The user picked a contact.
// The Intent's data Uri identifies which contact was selected. mBluetoothStatus.setText("Enabled"); } else mBluetoothStatus.setText("Disabled"); } }
private void bluetoothOff(View view){
mBTAdapter.disable(); // turn off
mBluetoothStatus.setText("Bluetooth disabled");
Toast.makeText(getApplicationContext(),"Bluetooth turned Off", Toast.LENGTH_SHORT).show();
}
private void discover(View view){
// Check if the device is already discovering if(mBTAdapter.isDiscovering()){ mBTAdapter.cancelDiscovery(); Toast.makeText(getApplicationContext(),"Discovery stopped",Toast.LENGTH_SHORT).show(); } else{ if(mBTAdapter.isEnabled()) {
mBTArrayAdapter.clear(); // clear items mBTAdapter.startDiscovery(); Toast.makeText(getApplicationContext(), "Discovery started", Toast.LENGTH_SHORT).show(); registerReceiver(blReceiver, new IntentFilter(BluetoothDevice.ACTION_FOUND)); } else{ Toast.makeText(getApplicationContext(), "Bluetooth not on", Toast.LENGTH_SHORT).show();
} } }
final BroadcastReceiver blReceiver = new BroadcastReceiver() {
@Override
public void onReceive(Context context, Intent intent) { String action = intent.getAction();
if(BluetoothDevice.ACTION_FOUND.equals(action)){ BluetoothDevice device =
22
// add the name to the list
mBTArrayAdapter.add(device.getName() + "\n" + device.getAddress()); mBTArrayAdapter.notifyDataSetChanged(); } } };
private void listPairedDevices(View view){
mPairedDevices = mBTAdapter.getBondedDevices(); if(mBTAdapter.isEnabled()) {
// put it's one to the adapter
for (BluetoothDevice device : mPairedDevices) mBTArrayAdapter.add(device.getName() + "\n" + device.getAddress());
Toast.makeText(getApplicationContext(), "Show Paired Devices", Toast.LENGTH_SHORT).show();
} else
Toast.makeText(getApplicationContext(), "Bluetooth not
on", Toast.LENGTH_SHORT).show(); }
private AdapterView.OnItemClickListener mDeviceClickListener =
new AdapterView.OnItemClickListener() {
public void onItemClick(AdapterView<?> av, View v, int
arg2, long arg3) {
if(!mBTAdapter.isEnabled()) {
Toast.makeText(getBaseContext(), "Bluetooth not on", Toast.LENGTH_SHORT).show();
return; }
mBluetoothStatus.setText("Connecting...");
// Get the device MAC address, which is the last 17 chars in the View
String info = ((TextView) v).getText().toString(); final String address = info.substring(info.length() -
17);
final String name = info.substring(0,info.length() -
17);
// Spawn a new thread to avoid blocking the GUI one new Thread()
{
public void run() {
boolean fail = false; BluetoothDevice device = mBTAdapter.getRemoteDevice(address);
try {
mBTSocket = createBluetoothSocket(device); } catch (IOException e) {
23
fail = true;
Toast.makeText(getBaseContext(), "Socket creation failed", Toast.LENGTH_SHORT).show();
}
// Establish the Bluetooth socket connection. try { mBTSocket.connect(); } catch (IOException e) { try { fail = true; mBTSocket.close(); mHandler.obtainMessage(CONNECTING_STATUS, -1, -1) .sendToTarget(); } catch (IOException e2) {
//insert code to deal with this Toast.makeText(getBaseContext(),
"Socket creation failed", Toast.LENGTH_SHORT).show(); } } if(fail == false) { mConnectedThread = new ConnectedThread(mBTSocket); mConnectedThread.start(); mHandler.obtainMessage(CONNECTING_STATUS, 1, -1, name) .sendToTarget(); } } }.start(); } };
private BluetoothSocket createBluetoothSocket(BluetoothDevice
device) throws IOException { return
device.createRfcommSocketToServiceRecord(BTMODULEUUID);
//creates secure outgoing connection with BT device using UUID
}
private class ConnectedThread extends Thread {
private final BluetoothSocket mmSocket; private final InputStream mmInStream; private final OutputStream mmOutStream;
public ConnectedThread(BluetoothSocket socket) { mmSocket = socket;
InputStream tmpIn = null; OutputStream tmpOut = null;
// Get the input and output streams, using temp objects because
// member streams are final try {
24 tmpIn = socket.getInputStream(); tmpOut = socket.getOutputStream(); } catch (IOException e) { } mmInStream = tmpIn; mmOutStream = tmpOut; }
public void run() {
byte[] buffer = new byte[1024]; // buffer store for the stream
int bytes; // bytes returned from read() // Keep listening to the InputStream until an exception occurs
while (true) { try {
// Read from the InputStream bytes = mmInStream.available(); if(bytes != 0) {
SystemClock.sleep(100); //pause and wait for rest of data. Adjust this depending on your sending speed. bytes = mmInStream.available(); // how many bytes are ready to be read?
bytes = mmInStream.read(buffer, 0, bytes);
// record how many bytes we actually read
mHandler.obtainMessage(MESSAGE_READ, bytes, -1, buffer)
.sendToTarget(); // Send the obtained bytes to the UI activity
} } catch (IOException e) { e.printStackTrace(); break; } } }
/* Call this from the main activity to send data to the remote device */
public void write(String input) {
byte[] bytes = input.getBytes(); //converts entered String into bytes
try {
mmOutStream.write(bytes); } catch (IOException e) { } }
/* Call this from the main activity to shutdown the connection */
public void cancel() { try {
mmSocket.close();
} catch (IOException e) { } }
25
public void seekbarr(){
seek_bar = (SeekBar)findViewById(R.id.seekbar); text_view = (TextView)findViewById(R.id.laytemp); text_view.setText(seek_bar.getProgress() + " / " + seek_bar.getMax()); seek_bar.setOnSeekBarChangeListener( new SeekBar.OnSeekBarChangeListener() { @Override
public void onProgressChanged(SeekBar seekBar,
int i, boolean b) { progress_value = i; text_view.setText(i + " / " + seek_bar.getMax()); // Toast.makeText(MainActivity.this,"SeekBar in Progress", Toast.LENGTH_LONG).show(); } @Override
public void onStartTrackingTouch(SeekBar seekBar) { //Toast.makeText(PengaturanAwal.this,"SeekBar in StartTrackingTouch", Toast.LENGTH_SHORT).show(); } @Override
public void onStopTrackingTouch(SeekBar seekBar) { text_view.setText( progress_value + " / " + seek_bar.getMax()); //Toast.makeText(PengaturanAwal.this,"SeekBar in StopTrackingTouch", Toast.LENGTH_SHORT).show(); } } ); } }
26
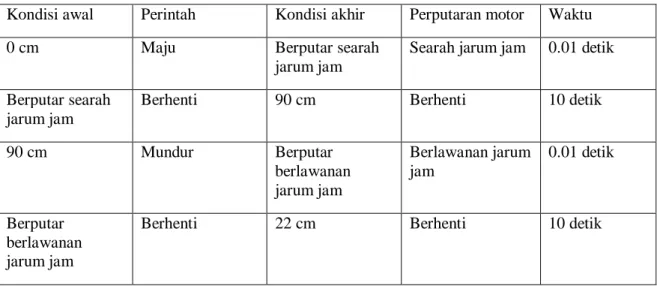
Berikut adalah hasil dari percobaan yang telah dilakukan.
Tabel 4. 1 Hasil percobaan sumbu vertikal
Kondisi awal Perintah Kondisi akhir Waktu Perputaran motor
0 cm 100 cm 100 cm 10 menit Searah jarum
jam
100 cm 40 cm 40 cm 6 menit Berlawanan
jarum jam Berputar searah
jarum jam
Berhenti 79 cm 0.01 detik Tidak berputar
Tabel 4. 2 Hasil percobaan sumbu horizontal
Kondisi awal Perintah Kondisi akhir Perputaran motor Waktu
0 cm Maju Berputar searah
jarum jam
Searah jarum jam 0.01 detik
Berputar searah jarum jam
Berhenti 90 cm Berhenti 10 detik
90 cm Mundur Berputar berlawanan jarum jam Berlawanan jarum jam 0.01 detik Berputar berlawanan jarum jam
Berhenti 22 cm Berhenti 10 detik
Pada percobaan yang telah dilakukan untuk pengaturan pada sumbu vertikal sudah sesuai dengan sistem yang diingin dicapai dan pada sumbu horizontal terdapat delay sebanyak 10 detik.
27
BAB V
TINJAUAN TEORIS
5.1.
Arduino Uno
Arduino Uno adalah papan Arduino standar dan yang paling mudah tersedia. Arduino Uno menggunakan Atmel ATmega328 dengan total 32 KB flash memory, 2 KB SRAM, dan 1 KB memori EEPROM. Dengan total 14 pin I/O digital dan 6 pin I/O analog, Arduino Uno adalah perangkat yang mampu menjalankan sebagian besar program. ATmega16u2 digunakan untuk mengelola komunikasi serial [4]. Arduino Uno adalah salah satu papan yang paling murah dan paling banyak digunakan.
Gambar 5. 1. Arduino uno [4]
5.2.
4-Channel Relay
4-channel relay board adalah opto-coupled relay board yang memiliki empat input untuk setiap saluran. Input relay berada di sisi kanan bawah papan sementara output relay terletak di sisi atas papan. Posisi tengah setiap relay adalah common point, koneksi ke kiri adalah kontak normally close (NC), sedangkan koneksi ke kanan adalah kontak yang normally open (NO). Kontak relay memiliki spesifikasi AC250V pada 10A dan DC30V 10A. IN1, IN2, IN3, dan IN4 adalah pin masukan relay untuk mengaktifkan relay tersebut [3].
28
Gambar 5. 2. 4-Channel relay board [3]
5.3.
HC-SR04 ultrasonic module
Gambar 5. 3. HC-sr04 ultrasonic module [3]
Prinsip dasar pengoperasian modul sensor ultrasonik HC-SR04 adalah sebagai berikut:
Pulsa pemicu 10μs dikirim ke modul.
Modul kemudian mengirimkan delapan sinyal gelombang persegi 40kHz ke target dan menyalakan pin echo.
Program memulai penghitung waktu.
Sinyal mengenai target dan bergema kembali ke modul.
Ketika sinyal dikembalikan ke modul, pin echo akan mati.
Timer dihentikan.
29
30
BAB VI
KESIMPULAN DAN SARAN
Pada sistem yang telah dibuat menggunakan Arduino atmega328p telah sesuai dengan sistem yang diharapkan, tetapi belum diimplementasikan pada sistem sesungguhnya. Dari hasil uji coba terdapat lagging sebanyak 10 detik. Hipotesis awal lagging tersebut disebabkan oleh kemampuan dari mikrokontroler yang digunakan. Untuk pembuktian tersebut diperlukan penelitian lebih lanjut. Pada pemanfaatan serial komunikasi bluetooth hanya dapat terhubung dengan jarak kurang dari 10 meter oleh karena itu serial komunikasi dapat dikembangkan menjadi menggunakan internet agar memiliki jarak yang lebih jauh.
31
DAFTAR PUSTAKA
[1] [Online]. Available: http://www.batan.go.id/index.php/id/home/profil-batan.
[2] D. Norris, The Internet of things: do it yourself projects with Arduino, Raspberry Pi, and BeagleBone Black, McGraw Hil, 2015.
[3] D. Ibrahim, ARM-Based Microcontroller Projects Using MBED, Oxford: Newnes, 2019. [4] J. A. Langbridge, Arduino Sketches: Tools and Techniques for Programming Wizardry,
Indianapolis: John Wiley & Sons, 2015.
[5] M. Yener, Expert Android Studio, Indianapolis: John Wiley & Sons, 2016. [6] M. Banzi, Getting Started with Arduino, Sebastopol: Maker Media, 2015. [7] W. Stallings, Wireless Communication Networks and Systems, Pearson, 2016.
32
LAMPIRAN
1
Abstract—Mobile carrier radioactive source is a tool used
to carry out testing for radiation characteristics. The testing process is done both in statically and dynamically conditions to conduct calibration on Radiation Portal Monitor according to the requirements of SNI IEC 62244-2016. The control module is designed to meet the following requirements, it can set a carrier speed of at least 8 km/h, it can adjust the height of the radioactive source between 1 m and 2.5 m, it has automatic forward and backward direction mode. Furthermore, the mobile carrier can be controlled remotely for personnel tester safety. The control module can stop the mobile carrier suddenly when an emergency occurs. The mobile carrier uses a portable power supply so that it can move freely and easily shifted. To meet these requirements, the driving power of carrier a motor of 24-volt dc with 250 watts. The radioactive source uses a driving power of 12-volt dc motor with minimum lift power of 5 kg. The control module designed uses a microcontroller with an android application-based interface that is connected by wireless. In the android application there are virtual numbers and input buttons to give commands to the control module. The application can also receive carrier speed information and height of the radioactive source. To break the power of driving motor of carrier and the driving power of the lifter of radioactive source, the mobile carrier uses two level relays, namely low current conductivity relays and relays with high current conductivity. Next in order to move forward and backward automatically, at each end of carrier is equipped with a limit switch. The button and top position barriers on the radioactive source lifter use a limit switch.
Index Terms—Controller design, android application, and
wireless connection.
I. INTRODUCTION
ince 2014 Pusat Rekayasa Fasilitas Nuklir Badan Tenaga Nuklir Nasional (PRFN BATAN) has started to develop a Radiation Portal Monitor (RPM) device. Until 2019, three types of RPM have been produced, namely RMR-15 using type PVT gamma detector, currently installed in the Kawasan Nuklir (KN) Pasar Jumat. PMR-16 uses a NaI (TL).
NaI (Tl) is the most extensively used material. NaI (Tl) has a very high luminescence (scintillation) efficiency and is available in single crystal or polycrystalline forms in a wide variety of sizes and geometries [1].
Type gamma detector and a neutron detector, this type of
Tirta Jayadiharja is with the Electrical Engineering Department, Universitas Pertamina, Daerah Khusus Ibukota Jakarta 12220, Indonesia (e-mail: [email protected]).
RPM is generally used for nuclear installation areas. The third type is RPM-PPTI with a cylindrical NaI (TL) gamma detector, RPM-PPTI is designed for use in the area of the sea and air ports. RPM-16 and RPM-PPTI are currently under testing for product certification based on SNI IEC 62244:2016 [2]. One of the tests included testing the characteristics of radiation. In testing process, the radiation characteristics required a device with the ability to move vertically and horizontally which represents the vehicle that passes through the monitor portal. The device name is mobile carrier of radioactive source. This paper will present the mobile carrier of radioactive source design.
Design of Controller Module of Mobile Carrier
Radioactive Source
Tirta Jayadiharja
Electrical Engineering Department, Universitas Pertamina
S
Fig. 2. Indonesian PMR-16 and RPM PPTI. Fig. 1. Indonesian PMR-15.
2 II. METHODOLOGY
The design method of controller module uses the V-shaped method, shown in Figure 3.
III. RESULT
The mobile carrier of radioactive source is a device that can moved on vertical and horizontal axes. The vertical axis functions is used as the height position of the radioactive source to the detector. The horizontal axis functions is used as the distance position of the detector radioactive source. Visually shown in figure 4. The design requirement or specifications a mobile carrier of radioactive source based on SNI IEC 62244:2016 Standard. In the clausal 6.3.2 is about a method of testing gamma radiation detection, the radioactive source test must move through the top, middle, bottom, and center of lower and upper detection area [2].
The speed of horizontal horizontal movement must not exceed 8 km/h [3]. The Centre of processing module use microcontroller with analog output, digital input output and Bluetooth serial communication. Input control given by mobile phone with android application and connected to
controller module by wireless communication. The Direct Current (DC) motor driver will be controlled a speed of horizontal motor with variation input speed from microcontroller analog output. To change the direction of movement the motor, digital out from controller will be drive a low current relay module [4].
DC motor for horizontal movement and vertical horizontal movement that require a high power of DC current to connect the DC power source with high current relay module. The high current relay module controlled by
Fig. 7. Software flow chart of vertical moving of controller mobile carrier design.
Fig. 6. Software flow chart of horizontal moving of controller mobile carrier design.
Fig. 5. Hardware controller of mobile carrier design.
Fig. 4. Vertical and horizontal moving of mobile carrier design. Fig. 3. V-Shaped method design.
3 a low current relay module. The measuring a speed of
horizontal motor uses a proximity sensor to read pulses of wheel rotation. The pulses converted to speed parameter by controller. The measuring a height of radiation source by ultrasonic sensor [5].
A speed of horizontal movement and height of source can be set by set point input. To change auto direction of horizontal motor used forward and reverse limit switch. The vertical movement is protected by upper and lower limit switches. The change of position used vertical movements for upward or downward direction.
The hardware block diagram a controller of mobile carrier showed in figure 5. The device design of mobile carrier radioactive source can be moved. Therefore, a power source used 2 x 12-volt DC batteries by series arranged, so the obtain a 24-volt DC voltage as a power source for horizontal motors. The ability of the minimum battery current can travel a distance of 3 x 50 x 6 meters or equal to 900 meters. Horizontal motors have the power to pull or push the total load of a device weight ±60 Kg. To facilitate assembly between modules using the connector as a connector.
The microcontroller is programmed to carry out the speed and direction control commands of the horizontal motor. Determines the radiation source position of the vertical RPM motor detector direction. The program flow embedded in the microcontroller is shown in Figure 6, 7, and 8. The microcontroller command input obtained from the remote command by the mobile carrier application on the mobile phone or smart phone. Android-based application layout design shown in Figure 9.
IV. CONCLUSION
The mobile carrier radioactive source is a tool for test the radiation characteristics of the radiation portal monitor device with horizontal and vertical motion capability. The test can avoid exposure from the radiation source because the device can operate remotely. The design reference of a mobile carrier radioactive source from the IEC SNI 62244:2016 standard. The horizontal motor movement speed does not exceed 8 km per hour to meet these speeds in the design of dc motors can controlled speed. Other requirements, the position of the radioactive source can adjusted to 4 meters of height. The requirement design take a source-level motor that can adjusted for according to the set point value. The central control design used a programmed microcontroller that can communicate with mobile phone devices wirelessly. Mobile carrier radioactive source devices are designed to be installed in different conditions and locations, so the connecting cables are equipped with connectors and power resources using batteries.
ACKNOWLEDGMENT
The author would like to thank PRFN-BATAN for all laboratory facilities and workshops, the RPM PPTI Innovation Team and the funding of innovation incentives from the Ministry of Research, Technology and Higher Education (Kemenristekdikti).
REFERENCES
[1] Radiation Safety Section, “Detection of Radioactive Materials at Borders”, IAEA-TECDOC-1312, IAEA, September 2002.
[2] SNI IEC 62244:2016 “Instrumentasi proteksi radiasi - Monitor radiasi yang terpasang untuk deteksi bahan nuklir khusus dan radioaktif di perbatasan wilayah (IEC 62244:2006, IDT) “, BSN 2016.
[3] Paolo Gai , Giuseppe Lipari, Marco Di Natale, Nicola Serreli , Luigi Palopoli , Alberto Ferrari , “ Adding Timing Analysis to Functional Design to Predict Implementation Errors “, SAE International , 2007, DOI: 10.4271/2007-01-1272.
[4] Joko Triyanto, Dian Fitri Atmoko, Ahmad Rifai , “Perekayasaan Perangkat Lunak Portal Monitor Radiasi Dengan LabVIEW™”, Majalah Prima, Volume 11, Nomor 2, November 2014, 35-43. [5] Dian Fitri Atmoko, Erwin Nashrullah, Usep SG, Beni Syawaludin ,
“Rancang Bangun Modul Pencacah 16 Bit 3 Input Dengan Komunikasi Tcp/Ip Untuk Portal Monitor Radiasi PMR15”, Majalah Prima, Volume 12, Nomor 2, November 2015, 29-37.
Fig. 9. Design layout of mobile phone user interface of mobile carrier Fig. 8. Software flow chart of horizontal motor speed control
#Sl*,
uniu*n*i*Y#
Pertamrna
Jakarta 08 Oktober 2019Nomor
:
006/tJP-DKN4.lruNDlWZA19Lampiran :
-Perihal
:
Undanean SeminarKeria Praktik Prosram
SfirdiTeknik Elektro
Dengan hormat,
Sehubungan
dengan
akan
dilaksanakannyaseminar
kerja
praktik,
maka
kamimengundang Sivitas Akademik Program Studi Teknik Elektro untuk dapat menghadiri seminar dengan peserta seminar sebagai berikut :
Namapeserta seminar KP
NIM
Judul Laporan
DosenPembimbing
Yang akan dilaksanakan pada :
Hari/Tanggal Waktu
Tempat
Tirta Jayadiharja 102116009
Rancang Bangun
Mobile
Carrier
of
Radioactive Source untuk Pengujian Portal Monitor RadiasiDr.Eng. Wahyu Kunto Wibowo, S.T.,M.Eng
Rabu" 09 Oktober 2019 10.30
-
13.002805 Gedung Griya Legita
*
Universitas Pertamina Besar harapan kami kiranya Sivitas Akademik Program Studi Teknik Elektro agar dapat menghadiri undangan tersebut.Demikian surat undangan
ini
disampaikan. Atas perhatiannya kami ucapkan terima kasih. Hormat kami,a.n Ketua Program Studi
Teknik Elektro
Sekretaris Program Studi
Teknik Elektro
Aulia
Rahma Annisa..M.T
NrP. 116057
TJNTVERSTTAS PERTAMINA
PROGRAM STUDI TEKNIK EIEKTRO
Jl. TeukuNyak AriefKawasan Simprug Kebayoran lama"
Jakarta Selatan 12220, T elp + 6221 29M4308 www.univasitaspertarninaac.id
G',+-batan
SURAT KETERANGAN SETESAI KERIA PRAKTIK
Nomor
..9-.:..?..*.k
^zAN
lPF
t
t.l
lHUoT/o|lLuS
Yang bertanda tangan di bawah ini:
Nama Nomor Pegawai Iabatan Instansi Alamat Instansi
A
t*t f ffH ht
M6lt,
gt
l&o&al1to6on
r 6oYSelaku Pembimbing Institusi, menyatakan bahwa mahasiswa berikut:
Nerne
'T(pzA
XAfADrkl+pMNrM
,
...!.93.1!.9..!?.:.2...Program Studi Telah menyelesaikan
Instansi
Bagian
Tema Kerja Praktik
,
...ff.|*5..,'-l:.:lY
Universitas PertaminaKerja Praktik di:
,
...f.ffi:.
..:....?.:.:.1.:,
....9.lmfl:
..PS-{P.*.J..!".:.*..?
p.7,ff7
oa ct,
...P-ffi:ff.g':f.ffi
i...W
q
tto*1texw
ftu.."
-Jw*
i;'
i{#ii'
;iJ"'
i
dtii;:' i;n xr*
p.a or A hDemikian Surat Keterangan
ini
dibuat untuk dapat dipergunakan secara bertanggungjawab.
..
Dian Fitri Atmoko.''ST. '
NIP. 19 B 1 0 B 0 120 0 60 4tUffi ;:7:;"
l
:,,'''
Tangerang,23luli20t9
--:- I t
UNIVERSITAS PERTAMINA
*tfr'q,
,"n*^,r*Y$
Pertamrna
EARI
TANGGAL PI]KTIL AGARA TEMPAT R*bu 09 Oktobsrl0l9 1030. 13.00Sominer Rorja Prakiik Prodi Teknik Eloktro
2ff)5 Gedung Grtyx l"€gits - Universit{s Fertrmins
tlo
lrcihdTindaTingSii
I
A.
f,hatol+qb,l.
V
I
n 2 Annida.J.k
n
,Awfu
3flanda
f
.l
3 ....w
4Trt-
Muha
c))
+ ...9-..:,... 5 l^od9 V"r\ent ,....-fl.:... 6\|-f"^
,lm
7ffr'd
\tur
$raV$aNqA,
afrxtw_
I
b-ho,.r.n,o,ot
Rr*rrt
eH
9Isfuo
$o,ronie"
,
sllH
10Hagsat-
?urr^rmdrhr*w
11Muha'm6efl,lhsan
,,M..
12ftzvqa^
6-lut,tqv, 13}or,,of
RrAo-s
b{,,
-&:l{-t4H,
nJr
A:r
14...\--.2,
a6^
15Vrron
l-lagr
p. 16Dn<+^
/\/
t7Ann,
Agquro
,r..&.."...-..
18*na
Fattoel
O ,,r4
19A*n;*
'fu""/
IZ-ur
,n.'M..
20A.h[-
l,l,r^*"A
,oK.
Fohrrto&e1 2lu.
72?t.
Ltt,
Mdsor.lu Sg[bJ Fahrrra.&61fvtotno"*..,1
!^.r(a.rr^a^ Stfuq.,T'vh
ToJn $l*ClWiltqu
fr4r?4"
9s
(a+guqs,nb 0rlaq9
tV
e$
Nr,^6tnon-FQ
5c.
YreS
SrtaUr
fi
lt^rv
(.ru^
b'{rUe
L1.
Q^n
fz
g
zt@_
0tl,"
Ahn"J
Ard
R.
tq
.A"tk
L9.
Arga
Ntiilya
pwnadhanb
llWvrwnoc\ft
um
3\-
L"*a
rU,u{.t
K_
2r\"t\W_
32'
ll,",ortrR."r.,-llo,rdr
gJ,
llb-55,
fuor
B*W
R,
T.\,/
B,M"^\
\A,Ale\
%pnuafl{n
?
'fuV$J
zE
^ef++gtn$.rqlz",
er.gul
\,\,
b.
0ru0[n
bSarr'^'t
,gW
Q.*\,cma,
l3"^al-"*'t
L+.7?-1t.
Auvl.crJ
{d^ri
Y-
't<-ln^
)9
T*.\u.
$\$,9!'
'rJ'"/)
'J4cl
4g.
ttta\u
Iilil,ih
4,
@
4t,
A{-Luit
trhori*n4c(
A
q(
4
4t.
K.l".i
Ko^tru*
^
+fu(
4\-
Cortur
ad},a
4g"
Ab-{4.
1au..^6q,yr
A
q'4-
Jq
-
---ts.
N"h["
A.
c.L.
nt.W
1b.
Mul.ano"! &t
A,r7a,N
on
tP
.\+
pc
innto.
Pl-
ror,tUrzr'1
"*
Q),U-t.
qrJ
Saf,UUn
hltcrratuto
,^t
%_
<r.Oke
(xarr,
1-1o1a;+a
=>
<9,W%
2:
:fry:Y
"
r^
0
4,
,t2.
l{.O-Ja-e*-t
Q-*,
,S1-
ls[\. gr@
59.
I
Katler
Anggo
ftayo&t3
Hruf*^,r*
va'
@-'
*
bH
#tu,
u*,,nlY*'
krtsmrrs
I(ARTU KENDALI SEMINAR KERJA PRAKTEK
NamaMahasiswa
: Tirta JayadiharjaNIM
:102116009Fakultas
: Teknnologi IndustriProgram
Studi
: Teknik Elekno.[tr,
.tx.In!
NO
TANGGAL
JTJIIULSEMINAR
SEMINAR/lrlIM
PESERTA PAR,{F'MODERATOR.
I
J
ohloLv
nr\
Pn11urn"nIt5l'{
.
(onlr",,r.tirHd,t
TctJa()o,V
cn{urpynfa
Flry.o illon
A
lriJ"l
d,rJz"0iu Yql;lotl(6
olll
lrr,
n**r,.r Hs.
Pl.o 2.3
ofr[,],,vt1
ft,th
-flr{*
tlrq[t
Conlnw,l*
foses
lirtoo,
d6str FI-Prrl"nr ul[oaL
fth;
lo1tt(s1l,5*.o^
otn,?h,o J.y
o[,[,h,
',g
Apt;f,s
qrbalr"f',
l.ai,lnnqh,nlad"
faeit,hs
frtcolar
J"sbfon
Naroalrn tot{6o Qt I orl 4.;
J[,[,"
uy
4pri[*;
J.o,p*r'
hr1
utful^lnlaht
piletL1.n
luor,,(?rJartxat fzvliltt
l"J't
V"tt4totl(6oIt
J
To,L 6o[o,n1,I lom.ltt
5.
J
o[[u,"
no't
hwq
h\lhuftaa
gil$rw
Wk*1f
4,invloq;/lallna4
EiW
torlkot
(_,,)*,,"*,.
6.J
'[[,[o',oq
tbf{afplr1
ilrtifulr
o[{oc[prX,
l
aponu4frati pfqqpor,
lor(too
{l
h,l
\il*dh*,
7.
1
,[{.h.
,r,1E-PJ
Pdtlhatr
\cu
\7uafta6
?rc
t&tlre4+
Iorc(ht
Eos
?an,hr*tltovttso 34
NQ
TANGGAL
JUDUT SEMINAR
SEMINARAIIM
PESERTAPARAF
MomhAroR
tt0a,
8..
$ o(<hfi,
nrJ
krnJru
ltw,
Vqte
la&oconofion* 0?ld46rtt
tplr"
h',n
<bhl
cnlnt
sga',,Uthor
lvant totltsooS{r^"L,,*.,,
9.lubhhv
w1
6;t!ff,
EsD
Podo,llco
-a
J;
pl
?rtain't
froniJn 5ok;nuL l0rlloo
lo
0 6nrJ*,*,,,,,,
10.l
o|lota,'t'rr
5;qtqa ka'Juri
hilrr${n
?rs.{mttl1,"rk*
PLcP?liir"
ew}c,lottt6o
f3
J*$5",,,_
11J
u(chu' uogo[(iFnt,ri 6lnkg PWfuaU
P:y::y-t
nataalao
g,p
4.aEch1cl&tlcnonnt-ltofinng4
4h4
aoft_tt
t4.katzo"t
bWf
,o ?.n6o q6e
n*r
fit!^nc 4w a ,5,7,ill
t2,
4l$-tn
- totg Srmuhg,Srstcn
0fr
dandosq,n
Hnrr
?qdq
sstcrt fC\og[5ngrs*"
c-, Tofttor,nd,aro.. 0r,ll6arh, Al{qnnr /I
tozrt6ot9
av
13.3
dt*oWrry
Su{t^
H9dnr(,c
Thrr, r,ho.0ad".
os{c'.
ul Iok,-n
ht"
fT.
Stnten 'Tbnat t,erS 5&vhar,n
r...o.{
fnarc,tfMnrQvq .Hrtrrnnorl/ ls
)
r\4O 61cf.\H
14.9
oU*k'
?,,te 00,.6"X,on !o"s5ot"'foa[ror,]tq r.,r.a'laa (a*pu
Swq
-
Battat h&lnh'
wt,
Sa.,tltlf
torrt6oo 5Gr
\$4
15.9
,**"
zns ftdl,jst
Ug,,r,
(,s{cn
le,wncaejah
fut{rt \{,.or(toF6rM
drgrb(,sol
ttrrh(
lag{r Dcan5?,rt,,
Arutrq toz tt6 ozo 16. 17. 18.NO
TANGGAT
JTID-IILSEMINAB
PESERTASEMINAR/Nru
PARAF
MODERATOR
19.. 20.*) Pauta h.aja praltek dapd ndaksanahm sanirw kaja prakek jrka telah
nngihnf
Senks
llasil KPminimal I0 kall Lembs ini wqiih disefi$ai aleh Dosen Penbinhing sehehan pelalrsmam Semin* Hasil KP
nahasisw a y mg b as
oryhtot
..t+,1"L
,n*-*iYi
hrtarnrna
LEMBAR
BIMBINGAN
KERJA
PRAIffIK
Nama
:
Tirtalayadiharia
NIM
:
L02tI6009
Program
Studi
:
Teknik ElekrroNo.
1Hart/Tanggal:
Sfnin,
,t3
5eplcn6tn
Lol!
Hal yang menjadi perhatian:
'
bim6;65on lolomrr .|ce,.1njrr[t
hlParaf Pembimbing:
No.
2Hari/Tanggal:
selo1r',th
ft?lmbv
vo,3 Hal yang meniadi perhatian:.binbirg"n
ldrmt
h"
ryl'trt
Paraf Pelnbimbing:
No.
3Hari/Tanggal: Julral
, 21
t?pht;
un
Hal yang menjadi perhatian:
-
binh"l".
jrrnq
hq"
yrkhn
No.
14Hari/Tanggah
b
6crto,
?o
*fhfu
ZaA Hal yang menjadi perhatian:'
hrn[ugan JorrP[
hri^
y"lrt;L
Paraf Pembimbing:
No.
sHari/Tanggal:
1eba,
I
d,bber b(3
Hal yang meniadi perhatian:
-
L,i^Ltryr,
;urnot krrlo
yr|m
Paraf Pembimbing:
No.
bHari/Tanggal:
r'oh
,
t okhhr
Loq
Hal yang menjadi perhatian:
-
hnh',j""
'J*nnt
h,lo
yrhtk
[\
Pembimbing:
No. Hari/Tanggal:
Hal yang menjadi perhatian:
batan
Nama
:Program Studi :
TEMBAR
BIMBINGAN
KERIA
PRAKTIK
Tirta
|ayadiharja
NIM:
L021L6009Teknik
Elektro
Perguruan Tinggi:
Universitas PertaminaNo.
Hari/Tanggal: $"b.1
l,lt
r0ni ?o !1Hal yang menjadi perhatian:
,
frrnLrlon
l.onlro,* p?ria
Je5o,
kTrlori
dr lc"[el
4
Paraf Pembimbing:
No.
Hari/Tanggal:
6cLa<^I
z iuli 1.0(3Hal yang menjadi perhatian:
'?snirur,,*
alol
Jo1
J5rn,{,on+
Paraf Pembimbing:
No.
Hari/Tanggal:
54eu
/ te
Vi
zo(l
Hal yang menjadi perhatian:
'lenielatn,,
6cti1(
J,5
J;X^,,kar.I
No.
Hari/Tanggal:
l*qfS
,lA
\vt;
Tott
Hal yang menjadi perhatian:
'
lzFJuJa
horlwo' r
di
r
Paraf Pembimbing:
No. Hari/Tanggal:
Hal yang menjadi perhatian:
Paraf Pembimbing:
No. Hari/Tanggal:
Hal yang menjadi perhatian:
Paraf Pembimbing:
No. Hari/Tanggal:
Hal yang menjadi perhatian:
Nama
: Program Studi :Tirta Jayadiharja
Teknik Elelrtro
DAFTAR
HADIR
KERJAPRAKTIK
NIM
:
'1.027'J.6009Perguruan Tinggi
:
Universitas PertaminaNo Hari, Tanggal Durasi 0am) Kegiatan Tanda Tangan Pembimbing Institusi I srfia
LQiuli 7s4
Jl*
Ptt[*L
l"r'[^
f"'lt
yny't
Ah^I
z.
K"5u
2$ \v1,i ls13
J
1,,
lentetae.nfrolrk
.1oq^ht
Jih(
&4
3. karrr.s2?
Switas
J
jo,
t-M.
q. juraa
I
tB
iwi
lott ,1t'^
c#,r1
g rsnin1 iuti
tor!
3r^
M
6 6?@sar iqi
qnt
I
ju"
fln)rraeon ftyf.
d^
,14J,5
{o[
C*"4q{
I
la[,.rr iuli
totl
3
ion
M
E
fdOit
tr
iuti
to'|
3j^
d4
3. ilmal
r
\oni
LoltXi^
dA
lo.
'$ln
E
\,toi'tuj
a-
J
Jq,{r,M
tl.
j
6tldltTuni
2il
1iqit
du"^
1t.
P j,ni
vH
lqt
1
'qr
-/z----dstry
ll.
Mfitt
U Junilott1i'q
8"9
tL JO(t4F1t
\ur
to$
5 iortcx14
ts. 5(litl

![Gambar 4. 2. 4-channel relay module [2]](https://thumb-ap.123doks.com/thumbv2/123dok/3159593.2340105/13.893.299.613.834.1064/gambar-channel-relay-module.webp)
![Gambar 4. 3. HC-sr04 module [2]](https://thumb-ap.123doks.com/thumbv2/123dok/3159593.2340105/14.893.341.574.172.308/gambar-hc-sr-module.webp)
![Gambar 4. 7. PWM in action [3]](https://thumb-ap.123doks.com/thumbv2/123dok/3159593.2340105/16.893.234.685.288.505/gambar-pwm-in-action.webp)

![Gambar 5. 1. Arduino uno [4]](https://thumb-ap.123doks.com/thumbv2/123dok/3159593.2340105/34.893.287.627.382.639/gambar-arduino-uno.webp)
![Gambar 5. 2. 4-Channel relay board [3]](https://thumb-ap.123doks.com/thumbv2/123dok/3159593.2340105/35.893.213.703.106.479/gambar-channel-relay-board.webp)
![Gambar 5. 4. Operation of the ultrasonic sensor module [3]](https://thumb-ap.123doks.com/thumbv2/123dok/3159593.2340105/36.893.241.682.112.379/gambar-operation-ultrasonic-sensor-module.webp)
