1
Perancangan Sistem Pengaturan Berjaringan dengan Metode Modulasi Logika fuzzy pada Media Kabel dan Nirkabel
Abyad Adi Raja, 2208100183
Bidang Studi Teknik Sistem Pengaturan, Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
e-mail : [email protected]
Abstrak -- Pada suatu jaringan, perbedaan jarak antara kontroler dan plant serta adanya traffic jaringan akan mempengaruhi pengiriman sinyal kontrol dan umpan balik.
Terjadinya waktu tunda dan packet drop merupakan kendala yang perlu ditangani agar respon sistem tetap stabil dan sesuai dengan spesifikasi yang diinginkan. Dalam buku tugas akhir ini membahas perancangan dan implementasi SPB dengan metode modulasi logika fuzzy pada media transmisi yang berbeda. Pengujian juga dilakukan dengan memberikan traffic tambahan pada jaringan agar terjadi kongesti. Media transmisi yang digunakan untuk media kabel adalah kabel UTP RJ45, sedangakan untuk media nirkabel menggunakan gelombang radio dengan frekuensi 2.4 Ghz. Sebagai pembanding digunakan kontroler PI dan kontroler fuzzy. Dari hasil pengujian menunjukkan bahwa saat traffic jaringan tinggi dengan beban 2 x 50 kbps paralel stream, jaringan akan mengalami kongesti yang menyebabkan antrian paket data pada buffer komputer. Kongesti ini akan menciptakan packet drop out & waktu tunda yang cenderung bertambah hingga nilai tertentu sehingga mempengaruhi kestabilan sistem.
Kata kunci : SPB ,modulator logika fuzzy, packet drop out, waktu tunda, media transmisi, traffict
1. PENDAHULUAN
PENGATURAN melalui Jaringan telah menjadi teknologi yang digunakan oleh banyak pihak seperti militer, swasta, dan aplikasi-aplikasi di Industri. Sensor, kontroler, dan aktuator yang terdistribusi satu sama lain ditempat yang jauh harus dapat melakukan pertukaran informasi melalui sebuah jaringan komunikasi[1].
Jaringan memungkinkan pertukaran data antara pengguna dilakukan secara jarak jauh, Mengurangi kompleksitas hubungan pengkabelan dan biaya media komunikasi, dan memberikan kemudahan dalam perawatan[1].
Teknologi pada komputer jaringan khusunya Ethernet semakin berkembang pesat, murahnya harga personal komputer, kemampuan transfer data yang semakin bertambah, penggunaan yang semakin meluas, hingga semakin banyaknya software dan aplikasi yang bisa digunakan menggunakan teknologi ini membuat ethernet banyak dipakai dikalangan pendidikan, perkantoran, maupun pribadi[1].
Media yang digunakan dalam teknologi Ethernet ini dapat berupa media nirkabel maupun yang berwujud fisik seperti kabel. Penggunaan jenis media ini dapat dipiih sesuai dengan kebutuhan dari pengguna. Media ini akan berfungsi sebagai penghantar infomasi – informasi penting yang ingin dikirimkan. Agar Informasi-informasi yang dikirimkan dapat mencapai tujuan perlu diperhatikan spesifikasi dari media perantara tersebut.
Adanya jaringan komunikasi dalam feedback- control loop membuat analisis SPB menjadi lebik kompleks. Teori kontrol konvensional harus diasumsikan dalam keadaan ideal, sepeti tidak adanya packet drop dan waktu tunda dari sensor menuju aktuator. Pengaruh packet drop dan waktu tunda jaringan dapat menurunkan performa dari suatu desain sistem kontrol tanpa memperhatikan faktor tersebut[2]
Penjelasan dari makalah ini disusun dengan aturan berikut. Bagian Kedua menjelaskan tentang packet drop dan waktu tunda pada SPB, Bagian Ketiga memberikan deskripsi dari rancangan sistem yang dibangun, Bagian Keempat menjelaskan desain kontroler, Bagian Kelima membahas pengujian sistem dengan beberapa perlakuan yang berbeda, dan diakhiri dengan Kesimpulan dari penelitian yang dilakukan.
2. SPB DENGAN PACKET DROP & WAKTU TUNDA
Sistem kontrol umpan balik closed loop yang melewati real-time network disebut sistem pengaturan berjaringan (SPB). Definisi dari sebuah SPB adalah informasi (masukan referensi, keluaran plant, masukan kontrol, dll) dikirim menggunakan jaringan dengan komponen-komponen sistem kontrol (sensors, kontroler, aktuarotor, dll)[3].
Banyak penelitian tentang SPB yang telah dilakukan, dari banyaknya penelitian tersebut. Isu yang menjadi perhatian utama adalah terjadinya waktu tunda dan packet drop [4]. Dalam kenyataannya, pengaturan dengan SPB menggunakan sinyal digital untuk dikirimkan ke plant yang bersifat kontinyu seperti pada Gambar 1 mendeskripsikan proses perubahan sinyal
digital ke kontinyu dan sebaliknya. Pada proses pengiriman tersebut, terjadi waktu tunda. Terdapat dua sumber waktu tunda dari jaringan: Sensor menuju kontroler τsc dan kontroler menuju aktuator τca. Waktu tunda akibat waktu pemrosesan komputer dapat dapat dimasukkan ke τsc atau τca [5]τ =τsc+τca [3].
Analisa waktu tunda yang terjadi akan sangat bergantung terhadapa waktu sampling (h). Saat nilai waktu tunda lebih besar dari waktu sampling τ > h, maka pembahasannya akan berbeda dengan nilai waktu tunda dengan nilai τ < h.
Gambar 1. SPB dengan waktu tunda jaringan [3]
Selain waktu tunda, kendala lain pada SPB adalah adanya packet drop ketika data yang dikirimkan tidak dapat mencapai tujuan. Jumlah packet drop terhadap seluruh data yang dikirimakan akan mempengaruhi kestabilan sistem. Dalam analisisnya, jumlah packet drop maksimal dapat dihitung dengan menurunkan persamaan dan menggambarkan grafik hubungan sampling (h) terhadap drop maksimum (d ). k Jika suatu plant kontinyu dengan persamaan state space sebagai berikut :
) ( ) (
.
t Bu t Ax
x= + (1)
) ( ) (t Cxt
y = (2)
dan kontroler u(t)=−Kx(t)disampling dengan periode h [6] didapat
k k
k x u
x +1=φ +Γ (3)
Dimana,
)
( K
A= φ−Γ (4)
∫
= Γ
= Γ
= Φ
= Φ
h
o As
Ah h e dsB
e
h) , ( )
( (5)
Dari persamaan 3,4, dan 5 nilai dari d dapat ditentukan k [2].
3. PERANCANGAN SISTEM
3.1 Arsitektur & Konfigurasi
SPB yang dibangun menggunakan dua konfigurasi, yaitu SPB dengan media kabel dan SPB media nirkabel yang menggunakan PCI Card sebagai data akusisi dan penghubung antara jaringan dengan plant.
Gambar 2.Konfigurasi SPB dengan media kabel SPB dengan media kabel dijabarkan padaa Gambar 2, Sedangkan Gambar 3 merepresentasikan konfigurasi SPB dengan media nirkabel. Pada Gambar 2 dan 3, terdapat Komputer plant yang dilengkapi PCI Card untuk akusisi data dari plant sehingga dapat berkomunikasi dengan komputer kontroler. Dalam pengerjaan tugas akhir ini, digunakan kabel ethernet Unshielded Twisted Pair (UTP) RJ-45 sebagai media komunikasi pada konfigurasi di Gambar 2.
Gambar 3. Konfigurasi SPB dengan media Nirkabel Sedangkan untuk Konfigurasi di Gambar 3, digunakan alat tambahan USB Wireless Adapter pada komputer kontroler untuk membangun jaringan Wireless antara kontroler dengan plant. Media yang digunakan adalah gelombang radio dengan frekuensi 2.4 Ghz.
Plant yang digunakan dalam pengerjaan Tugas Akhir ini adalah motor servo arus searah untuk sistem pengaturan kecepatan berjaringan.[8]
Gambar 4. Konfigurasi SPB dengan media kabel Pada konfigurasi ketiga, digunakan ADAM5000L/TCP sebgai pengganti peran komputer kontroler dan PCI card. Remote I/O ini merupakan modul komunikasi antara jaringan dan plant. Dalam proses interkoneksi antara kontroler dengan embedded sytem, digunakan Object Linkig and Embedding for process Control (OPC).
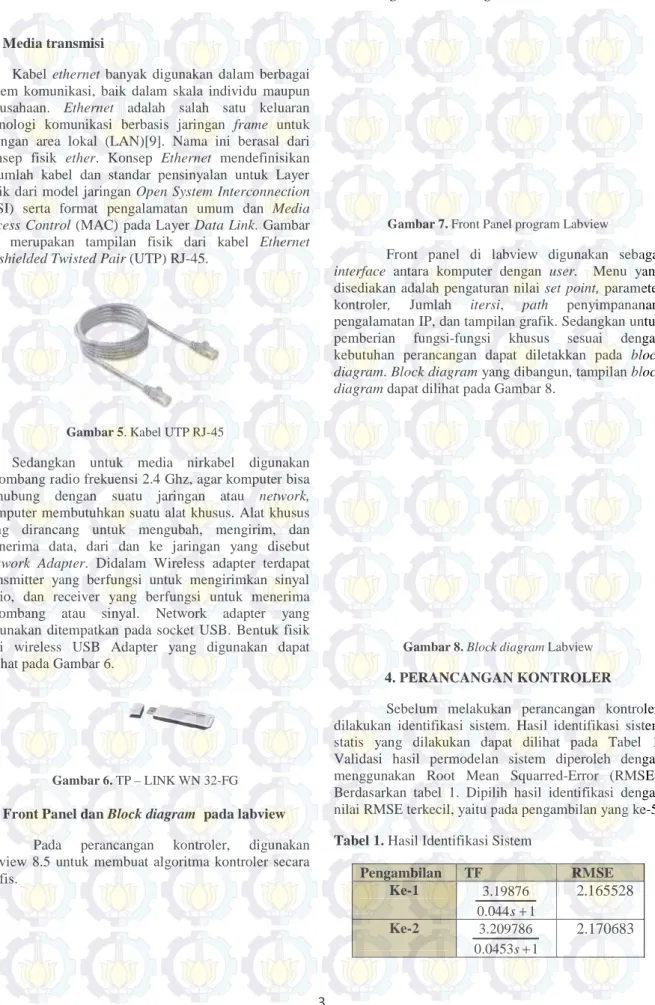
3 3.2 Media transmisi
Kabel ethernet banyak digunakan dalam berbagai sistem komunikasi, baik dalam skala individu maupun perusahaan. Ethernet adalah salah satu keluaran teknologi komunikasi berbasis jaringan frame untuk jaringan area lokal (LAN)[9]. Nama ini berasal dari konsep fisik ether. Konsep Ethernet mendefinisikan sejumlah kabel dan standar pensinyalan untuk Layer Fisik dari model jaringan Open System Interconnection (OSI) serta format pengalamatan umum dan Media Access Control (MAC) pada Layer Data Link. Gambar 3.3 merupakan tampilan fisik dari kabel Ethernet Unshielded Twisted Pair (UTP) RJ-45.
Gambar 5. Kabel UTP RJ-45
Sedangkan untuk media nirkabel digunakan gelombang radio frekuensi 2.4 Ghz, agar komputer bisa terhubung dengan suatu jaringan atau network, komputer membutuhkan suatu alat khusus. Alat khusus yang dirancang untuk mengubah, mengirim, dan menerima data, dari dan ke jaringan yang disebut Network Adapter. Didalam Wireless adapter terdapat transmitter yang berfungsi untuk mengirimkan sinyal radio, dan receiver yang berfungsi untuk menerima gelombang atau sinyal. Network adapter yang digunakan ditempatkan pada socket USB. Bentuk fisik dari wireless USB Adapter yang digunakan dapat dilihat pada Gambar 6.
Gambar 6. TP – LINK WN 32-FG
3.3 Front Panel dan Block diagram pada labview Pada perancangan kontroler, digunakan labview 8.5 untuk membuat algoritma kontroler secara grafis.
Gambar 7. Front Panel program Labview
Front panel di labview digunakan sebagai interface antara komputer dengan user. Menu yang disediakan adalah pengaturan nilai set point, parameter kontroler, Jumlah itersi, path penyimpananan, pengalamatan IP, dan tampilan grafik. Sedangkan untuk pemberian fungsi-fungsi khusus sesuai dengan kebutuhan perancangan dapat diletakkan pada block diagram. Block diagram yang dibangun, tampilan block diagram dapat dilihat pada Gambar 8.
Gambar 8. Block diagram Labview
4. PERANCANGAN KONTROLER
Sebelum melakukan perancangan kontroler, dilakukan identifikasi sistem. Hasil identifikasi sistem statis yang dilakukan dapat dilihat pada Tabel 1, Validasi hasil permodelan sistem diperoleh dengan menggunakan Root Mean Squarred-Error (RMSE).
Berdasarkan tabel 1. Dipilih hasil identifikasi dengan nilai RMSE terkecil, yaitu pada pengambilan yang ke-5.
Tabel 1. Hasil Identifikasi Sistem
Pengambilan TF RMSE
Ke-1
1 044 . 0
19876 . 3
+ s
165528 . 2
Ke-2
1 0453 . 0
209786 . 3
+ s
2.170683
Ke-3
1 0439 . 0
179957 . 3
+ s
2.15166
Ke-4
1 0437 . 0
188943 . 3
+ s
2.149389
Ke-5
1 049 . 0
162071 . 3
+ s
2.136969
4.1 Kontroler PI
Dalam perancangan Tugas Akhir ini, kontroler PI digunakan sebagai pembanding. Kontroler PI akan dirancang untuk memenuhi spesifikasi sebagai berikut:
• Settling time yang diharapkan ts (±5%) sekitar 0.441 detik
• Dengan Error steady state / Ess = 0, Tidak memiliki overshoot
Sehingga dipilih parameter kontroler PI dengan
• τi =τ=0.049
• ts*(±5%)≈3τ* ≈0.441detik
• τ*=0.147detik Dan dari rumus berikut
• τ*=
p i
KK
τ Didapat nilai dari K p
• K =p
1620 . 3 147 . 0
049 . 0
*K x
i =
τ
τ =0.10541
Sehingga didapat nilai dariK = 0.10541&p τi= 0.049
4.2 Kontroler Fuzzy
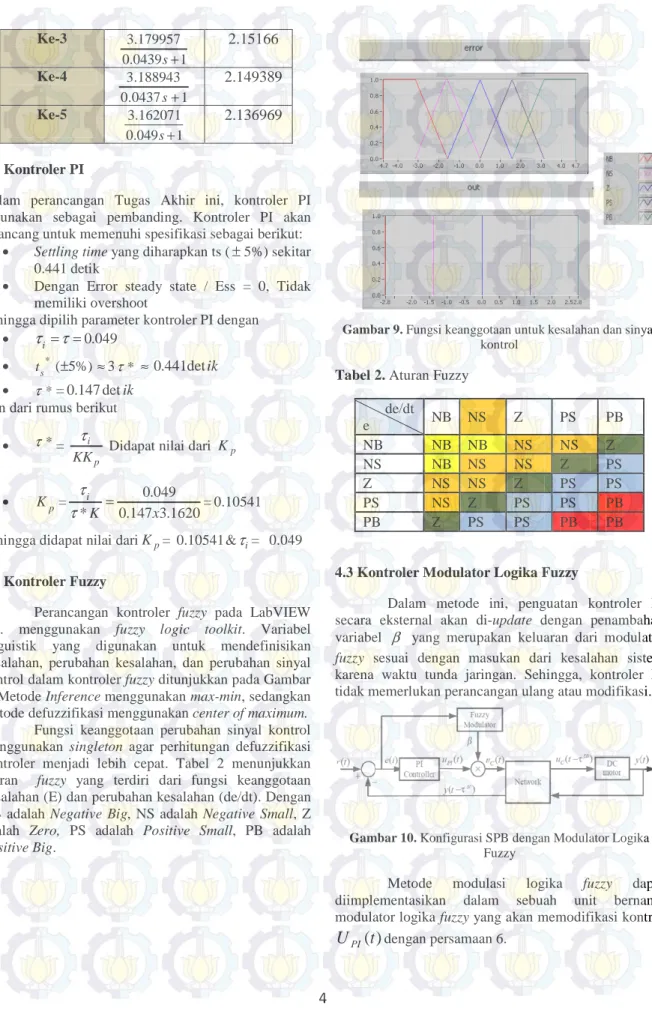
Perancangan kontroler fuzzy pada LabVIEW 8.5. menggunakan fuzzy logic toolkit. Variabel linguistik yang digunakan untuk mendefinisikan kesalahan, perubahan kesalahan, dan perubahan sinyal kontrol dalam kontroler fuzzy ditunjukkan pada Gambar 9. Metode Inference menggunakan max-min, sedangkan metode defuzzifikasi menggunakan center of maximum.
Fungsi keanggotaan perubahan sinyal kontrol menggunakan singleton agar perhitungan defuzzifikasi kontroler menjadi lebih cepat. Tabel 2 menunjukkan aturan fuzzy yang terdiri dari fungsi keanggotaan kesalahan (E) dan perubahan kesalahan (de/dt). Dengan NB adalah Negative Big, NS adalah Negative Small, Z adalah Zero, PS adalah Positive Small, PB adalah Positive Big.
Gambar 9. Fungsi keanggotaan untuk kesalahan dan sinyal kontrol
Tabel 2. Aturan Fuzzy de/dt
e NB NS Z PS PB
NB NB NB NS NS Z
NS NB NS NS Z PS
Z NS NS Z PS PS
PS NS Z PS PS PB
PB Z PS PS PB PB
4.3 Kontroler Modulator Logika Fuzzy
Dalam metode ini, penguatan kontroler PI secara eksternal akan di-update dengan penambahan variabel β yang merupakan keluaran dari modulator fuzzy sesuai dengan masukan dari kesalahan sistem karena waktu tunda jaringan. Sehingga, kontroler PI tidak memerlukan perancangan ulang atau modifikasi.
Gambar 10. Konfigurasi SPB dengan Modulator Logika Fuzzy
Metode modulasi logika fuzzy dapat diimplementasikan dalam sebuah unit bernama modulator logika fuzzy yang akan memodifikasi kontrol
) (t
U
PI dengan persamaan 6.5 dt
t e K t Kpe t
U t U
t
t I PI
C = = +
∫
0
) ( )
( )
( )
( β β β (6)
Dengan
β
adalah keluaran modulator, Kp adalah penguatan proporsional, KI adalah penguatan integral.Nilai dari
β
dipilih dari dua aturan fuzzy berdasarkan efek tunda jaringan sebagai berikut:• Jika e(t) KECIL, maka β=β1
• Jika e(t) BESAR, maka β=β2 Dimana 0 < β1 < β2 < 1.
5. PENGUJIAN
5.I Simulasi Pemberian waktu tunda buatan
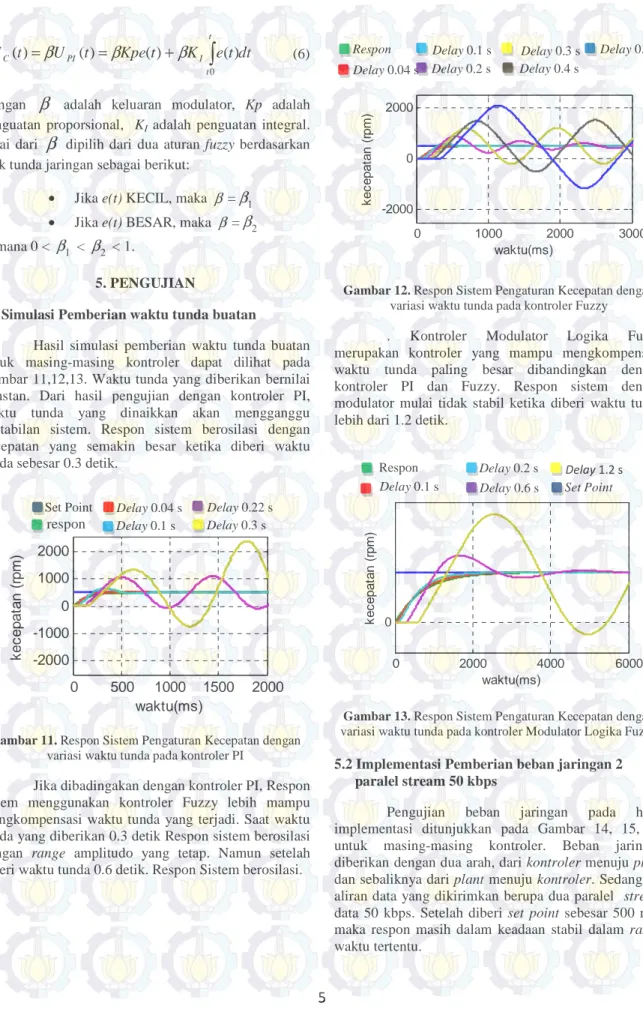
Hasil simulasi pemberian waktu tunda buatan untuk masing-masing kontroler dapat dilihat pada Gambar 11,12,13. Waktu tunda yang diberikan bernilai konstan. Dari hasil pengujian dengan kontroler PI, waktu tunda yang dinaikkan akan mengganggu kestabilan sistem. Respon sistem berosilasi dengan kecepatan yang semakin besar ketika diberi waktu tunda sebesar 0.3 detik.
Gambar 11. Respon Sistem Pengaturan Kecepatan dengan variasi waktu tunda pada kontroler PI
Jika dibadingakan dengan kontroler PI, Respon sistem menggunakan kontroler Fuzzy lebih mampu mengkompensasi waktu tunda yang terjadi. Saat waktu tunda yang diberikan 0.3 detik Respon sistem berosilasi dengan range amplitudo yang tetap. Namun setelah diberi waktu tunda 0.6 detik. Respon Sistem berosilasi.
Gambar 12. Respon Sistem Pengaturan Kecepatan dengan variasi waktu tunda pada kontroler Fuzzy
. Kontroler Modulator Logika Fuzzy merupakan kontroler yang mampu mengkompensasi waktu tunda paling besar dibandingkan dengan kontroler PI dan Fuzzy. Respon sistem dengan modulator mulai tidak stabil ketika diberi waktu tunda lebih dari 1.2 detik.
Gambar 13. Respon Sistem Pengaturan Kecepatan dengan variasi waktu tunda pada kontroler Modulator Logika Fuzzy 5.2 Implementasi Pemberian beban jaringan 2
paralel stream 50 kbps
Pengujian beban jaringan pada hasil implementasi ditunjukkan pada Gambar 14, 15, 16 untuk masing-masing kontroler. Beban jaringan diberikan dengan dua arah, dari kontroler menuju plant dan sebaliknya dari plant menuju kontroler. Sedangkan aliran data yang dikirimkan berupa dua paralel stream data 50 kbps. Setelah diberi set point sebesar 500 rpm maka respon masih dalam keadaan stabil dalam range waktu tertentu.
Delay 0.04 s
Delay 0.6 s Set Point Delay 0.1 s
0 2000 4000 6000
0
waktu(ms)
kecepatan (rpm)
Respon Delay 0.1 s Delay 0.04 s Delay 0.2 s
Delay 0.3 s Delay 0.4 s
Set Point respon
Delay 0.04 s
Delay 0.1 s Delay 0.3 s Delay 0.22 s
0 500 1000 1500 2000 -2000
-1000 0 1000 2000
waktu(ms)
kecepatan (rpm)
0 1000 2000 3000
-2000 0 2000
waktu(ms)
kecepatan (rpm)
Delay 0.6 s
Respon Delay 0.2 s Delay 1.2 s
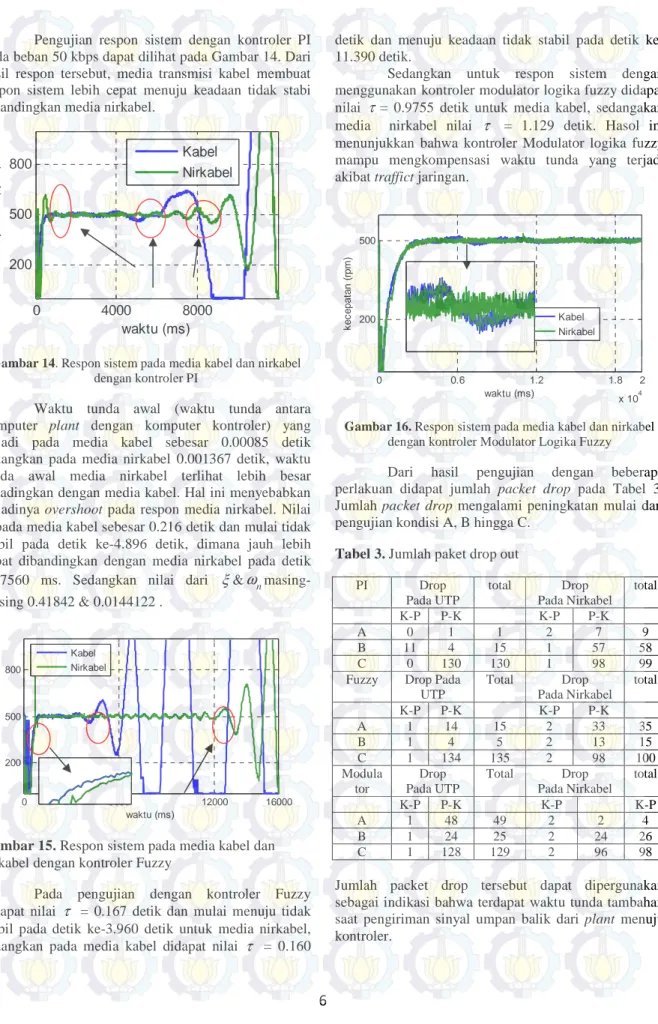
Pengujian respon sistem dengan kontroler PI pada beban 50 kbps dapat dilihat pada Gambar 14. Dari hasil respon tersebut, media transmisi kabel membuat respon sistem lebih cepat menuju keadaan tidak stabi dibandingkan media nirkabel.
Gambar 14. Respon sistem pada media kabel dan nirkabel dengan kontroler PI
Waktu tunda awal (waktu tunda antara komputer plant dengan komputer kontroler) yang terjadi pada media kabel sebesar 0.00085 detik sedangkan pada media nirkabel 0.001367 detik, waktu tunda awal media nirkabel terlihat lebih besar dibadingkan dengan media kabel. Hal ini menyebabkan terjadinya overshoot pada respon media nirkabel. Nilai τ pada media kabel sebesar 0.216 detik dan mulai tidak stabil pada detik ke-4.896 detik, dimana jauh lebih cepat dibandingkan dengan media nirkabel pada detik ke-7560 ms. Sedangkan nilai dari ξ&ωnmasing- masing 0.41842 & 0.0144122 .
Gambar 15. Respon sistem pada media kabel dan nirkabel dengan kontroler Fuzzy
Pada pengujian dengan kontroler Fuzzy didapat nilai τ = 0.167 detik dan mulai menuju tidak stabil pada detik ke-3.960 detik untuk media nirkabel, sedangkan pada media kabel didapat nilai τ = 0.160
detik dan menuju keadaan tidak stabil pada detik ke- 11.390 detik.
Sedangkan untuk respon sistem dengan menggunakan kontroler modulator logika fuzzy didapat nilai τ = 0.9755 detik untuk media kabel, sedangakan media nirkabel nilai τ = 1.129 detik. Hasol ini menunjukkan bahwa kontroler Modulator logika fuzzy mampu mengkompensasi waktu tunda yang terjadi akibat traffict jaringan.
Gambar 16. Respon sistem pada media kabel dan nirkabel dengan kontroler Modulator Logika Fuzzy
Dari hasil pengujian dengan beberapa perlakuan didapat jumlah packet drop pada Tabel 3.
Jumlah packet drop mengalami peningkatan mulai dari pengujian kondisi A, B hingga C.
Tabel 3. Jumlah paket drop out
PI Drop
Pada UTP
total Drop
Pada Nirkabel total
K-P P-K K-P P-K
A 0 1 1 2 7 9
B 11 4 15 1 57 58
C 0 130 130 1 98 99
Fuzzy Drop Pada UTP
Total Drop
Pada Nirkabel total
K-P P-K K-P P-K
A 1 14 15 2 33 35
B 1 4 5 2 13 15
C 1 134 135 2 98 100
Modula tor
Drop Pada UTP
Total Drop
Pada Nirkabel total
K-P P-K K-P K-P
A 1 48 49 2 2 4
B 1 24 25 2 24 26
C 1 128 129 2 96 98
Jumlah packet drop tersebut dapat dipergunakan sebagai indikasi bahwa terdapat waktu tunda tambahan saat pengiriman sinyal umpan balik dari plant menuju kontroler.
0 4000 8000
200 500 800
waktu (ms) kecepatan (rpm) Kabel
Nirkabel
0 6000 12000 16000
200 500 800
waktu (ms)
kecepatan (rpm)
Kabel Nirkabel
0 0.6 1.2 1.8 2
x 104 200
500
waktu (ms)
kecepatan (rpm)
Kabel Nirkabel
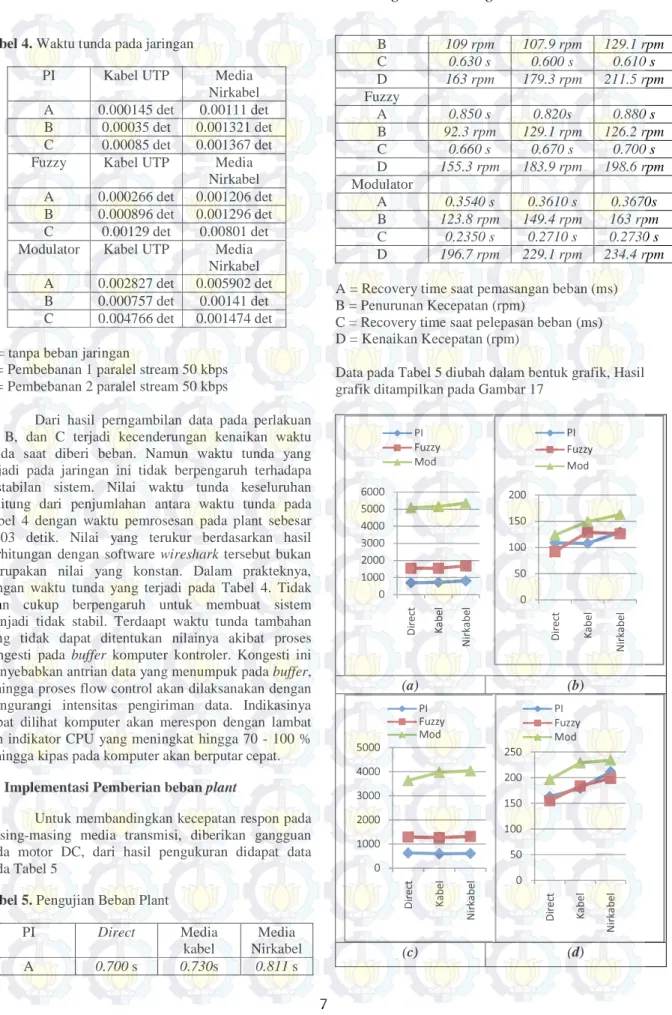
7 Tabel 4. Waktu tunda pada jaringan
PI Kabel UTP Media
Nirkabel A 0.000145 det 0.00111 det B 0.00035 det 0.001321 det C 0.00085 det 0.001367 det
Fuzzy Kabel UTP Media
Nirkabel A 0.000266 det 0.001206 det B 0.000896 det 0.001296 det C 0.00129 det 0.00801 det Modulator Kabel UTP Media
Nirkabel A 0.002827 det 0.005902 det B 0.000757 det 0.00141 det C 0.004766 det 0.001474 det A = tanpa beban jaringan
B = Pembebanan 1 paralel stream 50 kbps C = Pembebanan 2 paralel stream 50 kbps
Dari hasil perngambilan data pada perlakuan A, B, dan C terjadi kecenderungan kenaikan waktu tunda saat diberi beban. Namun waktu tunda yang terjadi pada jaringan ini tidak berpengaruh terhadapa kestabilan sistem. Nilai waktu tunda keseluruhan dihitung dari penjumlahan antara waktu tunda pada Tabel 4 dengan waktu pemrosesan pada plant sebesar 0.003 detik. Nilai yang terukur berdasarkan hasil perhitungan dengan software wireshark tersebut bukan merupakan nilai yang konstan. Dalam prakteknya, dengan waktu tunda yang terjadi pada Tabel 4. Tidak akan cukup berpengaruh untuk membuat sistem menjadi tidak stabil. Terdaapt waktu tunda tambahan yang tidak dapat ditentukan nilainya akibat proses kongesti pada buffer komputer kontroler. Kongesti ini menyebabkan antrian data yang menumpuk pada buffer, sehingga proses flow control akan dilaksanakan dengan mengurangi intensitas pengiriman data. Indikasinya dapat dilihat komputer akan merespon dengan lambat dan indikator CPU yang meningkat hingga 70 - 100 % sehingga kipas pada komputer akan berputar cepat.
5.3 Implementasi Pemberian beban plant
Untuk membandingkan kecepatan respon pada masing-masing media transmisi, diberikan gangguan pada motor DC, dari hasil pengukuran didapat data pada Tabel 5
Tabel 5. Pengujian Beban Plant
PI Direct Media
kabel
Media Nirkabel
A 0.700 s 0.730s 0.811 s
B 109 rpm 107.9 rpm 129.1 rpm
C 0.630 s 0.600 s 0.610 s
D 163 rpm 179.3 rpm 211.5 rpm Fuzzy
A 0.850 s 0.820s 0.880 s
B 92.3 rpm 129.1 rpm 126.2 rpm
C 0.660 s 0.670 s 0.700 s
D 155.3 rpm 183.9 rpm 198.6 rpm Modulator
A 0.3540 s 0.3610 s 0.3670s B 123.8 rpm 149.4 rpm 163 rpm C 0.2350 s 0.2710 s 0.2730 s D 196.7 rpm 229.1 rpm 234.4 rpm A = Recovery time saat pemasangan beban (ms) B = Penurunan Kecepatan (rpm)
C = Recovery time saat pelepasan beban (ms) D = Kenaikan Kecepatan (rpm)
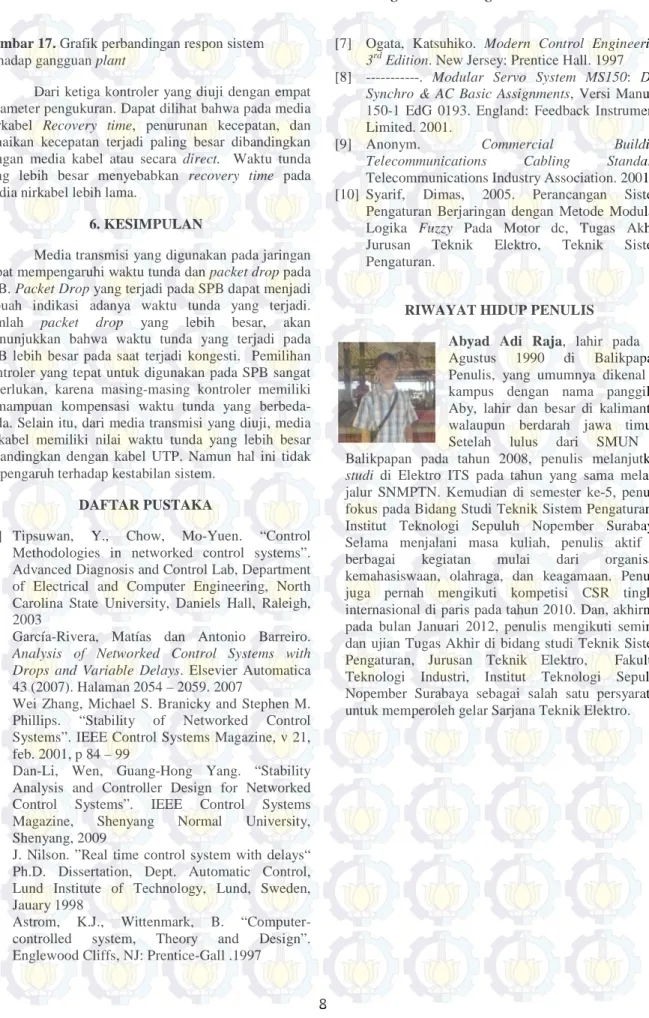
Data pada Tabel 5 diubah dalam bentuk grafik, Hasil grafik ditampilkan pada Gambar 17
(a) (b)
(c) (d)
0 1000 2000 3000 4000 5000 6000
Direct Kabel Nirkabel
PI Fuzzy Mod
0 50 100 150 200
Direct Kabel Nirkabel
PI Fuzzy Mod
0 1000 2000 3000 4000 5000
Direct Kabel Nirkabel
PI Fuzzy Mod
0 50 100 150 200 250
Direct Kabel Nirkabel
PI Fuzzy Mod
Gambar 17. Grafik perbandingan respon sistem terhadap gangguan plant
Dari ketiga kontroler yang diuji dengan empat parameter pengukuran. Dapat dilihat bahwa pada media Nirkabel Recovery time, penurunan kecepatan, dan kenaikan kecepatan terjadi paling besar dibandingkan dengan media kabel atau secara direct. Waktu tunda yang lebih besar menyebabkan recovery time pada media nirkabel lebih lama.
6. KESIMPULAN
Media transmisi yang digunakan pada jaringan dapat mempengaruhi waktu tunda dan packet drop pada SPB. Packet Drop yang terjadi pada SPB dapat menjadi sebuah indikasi adanya waktu tunda yang terjadi.
Jumlah packet drop yang lebih besar, akan menunjukkan bahwa waktu tunda yang terjadi pada SPB lebih besar pada saat terjadi kongesti. Pemilihan kontroler yang tepat untuk digunakan pada SPB sangat diperlukan, karena masing-masing kontroler memiliki kemampuan kompensasi waktu tunda yang berbeda- beda. Selain itu, dari media transmisi yang diuji, media nirkabel memiliki nilai waktu tunda yang lebih besar dibandingkan dengan kabel UTP. Namun hal ini tidak berpengaruh terhadap kestabilan sistem.
DAFTAR PUSTAKA
[1] Tipsuwan, Y., Chow, Mo-Yuen. “Control Methodologies in networked control systems”.
Advanced Diagnosis and Control Lab, Department of Electrical and Computer Engineering, North Carolina State University, Daniels Hall, Raleigh, 2003
[2] García-Rivera, Matías dan Antonio Barreiro.
Analysis of Networked Control Systems with Drops and Variable Delays. Elsevier Automatica 43 (2007). Halaman 2054 – 2059. 2007
[3] Wei Zhang, Michael S. Branicky and Stephen M.
Phillips. “Stability of Networked Control Systems”. IEEE Control Systems Magazine, v 21, feb. 2001, p 84 – 99
[4] Dan-Li, Wen, Guang-Hong Yang. “Stability Analysis and Controller Design for Networked Control Systems”. IEEE Control Systems Magazine, Shenyang Normal University, Shenyang, 2009
[5] J. Nilson. ”Real time control system with delays“
Ph.D. Dissertation, Dept. Automatic Control, Lund Institute of Technology, Lund, Sweden, Jauary 1998
[6] Astrom, K.J., Wittenmark, B. “Computer- controlled system, Theory and Design”.
Englewood Cliffs, NJ: Prentice-Gall .1997
[7] Ogata, Katsuhiko. Modern Control Engineering 3rd Edition. New Jersey: Prentice Hall. 1997 [8] ---. Modular Servo System MS150: DC,
Synchro & AC Basic Assignments, Versi Manual:
150-1 EdG 0193. England: Feedback Instruments Limited. 2001.
[9] Anonym. Commercial Building
Telecommunications Cabling Standard.
Telecommunications Industry Association. 2001 [10] Syarif, Dimas, 2005. Perancangan Sistem
Pengaturan Berjaringan dengan Metode Modulasi Logika Fuzzy Pada Motor dc, Tugas Akhir, Jurusan Teknik Elektro, Teknik Sistem Pengaturan.
RIWAYAT HIDUP PENULIS
Abyad Adi Raja, lahir pada 27 Agustus 1990 di Balikpapan.
Penulis, yang umumnya dikenal di kampus dengan nama panggilan Aby, lahir dan besar di kalimantan walaupun berdarah jawa timur..
Setelah lulus dari SMUN 2 Balikpapan pada tahun 2008, penulis melanjutkan studi di Elektro ITS pada tahun yang sama melalui jalur SNMPTN. Kemudian di semester ke-5, penulis fokus pada Bidang Studi Teknik Sistem Pengaturan – Institut Teknologi Sepuluh Nopember Surabaya.
Selama menjalani masa kuliah, penulis aktif di berbagai kegiatan mulai dari organisasi kemahasiswaan, olahraga, dan keagamaan. Penulis juga pernah mengikuti kompetisi CSR tingkat internasional di paris pada tahun 2010. Dan, akhirnya pada bulan Januari 2012, penulis mengikuti seminar dan ujian Tugas Akhir di bidang studi Teknik Sistem Pengaturan, Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember Surabaya sebagai salah satu persyaratan untuk memperoleh gelar Sarjana Teknik Elektro.
![Gambar 1. SPB dengan waktu tunda jaringan [3]](https://thumb-ap.123doks.com/thumbv2/123dok/3842094.3957333/2.892.118.779.127.1145/gambar-spb-dengan-waktu-tunda-jaringan.webp)