Abstrak— Tingkat stabilitas kapal dipengaruhi oleh aktivitas gelombang yang ada di lautan. Gelombang yang besar akan memberikan momen miring yang cukup besar sehingga dapat mengalahkan momen pengembali kapal. Stabilitas rolling kapal merupakan kemampuan sistem dalam merespon gangguan untuk berusaha kembali ke keadaan normal. Sistem tersebut adalah sistem ballast kapal yang akan bekerja secara otomatis dengan pengendali logika fuzzy. Logika fuzzy yang digunakan adalah tipe Sugeno-Takagi dengan masukan error sudut rolling dan roll rate serta keluaran tegangan yang dibutuhkan untuk membuka valve dimana bukaan valve sebanding dengan laju aliran air yang dipindahkan pada sistem ballast. Pengujian dilakukan tanpa gangguan dan dengan gangguan gelombang sea state 1 sampai 7. dalam keadaan normal kapal kelas SIGMA mempunyai sudut rolling maksimal 33°°°° dan hanya mampu bertahan di gangguan gelombang sea state 6. dari analisa data didapatkan bahwa pada gangguan gelombang sea state 6 diperoleh sudut rolling maksimal 26,24°°°°. Sehingga dapat disimpulkan bahwa Sistem kendali fuzzy yang telah dirancang telah sesuai dengan spesifikasi kapal.
Kata Kunci— Logika Fuzzy, Gangguan Gelombang, Sistem Ballast, Sudut rolling.
I. PENDAHULUAN
ada dinamika kapal terdapat enam macam gerakan yang dialami kapal pada saat berada di lautan. antara lain yaw, heave, surge, sway, roll, dan pitch. Sistem kontrol dari gerakan kapal tersebut harus mempunyai spesifikasi mampu menstabilkan dinamika kapal. Kapal dapat bergerak oleng disebabkan karena kapal mempunyai kemampuan untuk tegak kembali karena adanya pengaruh luar yang bekerja pada kapal. Pergerakan maneuver kapal dan aktivitas gelombang memberikan gangguan pada tingkat stabilitas kapal. Gelombang yang besar akan memberikan momen miring yang cukup besar sehingga dapat mengalahkan momen pengembali kapal. Apabila proses semacam itu terjadi secara terus menerus, maka pada suatu saat tertentu kapal sudah tidak memiliki kemampuan lagi untuk tegak kembali. Stabilitas rolling kapal merupakan kemampuan sistem dalam merespon gangguan untuk berusaha kembali ke keadaan normal. Untuk meredam gerakan oleng digunakan beban yang dapat berpindah untuk menjaga stabilitas kapal. Sistem kendali yang baik harus mempunyai ketahanan terhadap gangguan dan mempunyai respon yang cepat dan akurat. Untuk mengatasi
hal ini, diterapkan sistem kendali fuzzy. Pada penelitian terdahulu, menjelaskan bahwa stabilisasi rolling memiliki tindakan untuk mengembalikan kapal ke posisi tegak lurus selain meredam penuh dari gerakan periodiknya. Pada Tugas Akhir ini akan diteliti mengenai performansi sistem kendali stabilitas rolling pada kapal perang dengan metode logika Fuzzy.
II. URAIANPENELITIAN
Tahapan - tahapan yang dilakukan pada Tugas Akhir ini dapat dijabarkan melalui flowchart berikut:
Gambar 1. Flowchart Tugas Akhir
PERANCANGAN SISTEM KENDALI STABILITAS ROLLING
PADA KAPAL PERANG KAWAL RUDAL KELAS SIGMA – KRI
DIPONEGORO DENGAN MENGGUNAKAN LOGIKA FUZZY
Vibrio Yulian Dontiawan
1), Aulia Siti Aisyah
1), Agoes A. Masroeri
2)1) Jurusan Teknik Fisika, Fakultas Teknologi Industri
ITS Surabaya Indonesia 60111, email: [email protected], email: [email protected]
2) Jurusan Teknik Sistem Perkapalan, Fakultas Teknologi Kelautan
ITS Surabaya Indonesia 60111, [email protected]
2.1 Kapal Perang KRI Diponegoro
KRI Diponegoro merupakan salah satu dari empat kapal perang kelas SIGMA (Ship Integrated Geometrical Modularity Approach) yang dibeli pemerintah Indonesia dari perusahaan galangan kapal Schelde Naval Shipbuilding Belanda pada 2004.
Kapal KRI kelas sigma ini memiliki spesifikasi panjang ± 90,71 meter, lebar ± 13,02 meter, dan tinggi ± 8,2 meter, tiba di Indonesia pada 31 Agustus 2007 dan langsung bergabung di jajaran Komando Armada RI Kawasan Timur (Koarmatim) TNI AL. Kapal yang memiliki kecepatan jelajah 12/14-18/28 knot atau setara dengan 40 kilometer per jam itu, dilengkapi senjata anti serangan udara, anti kapal atas air, anti kapal selam dan perang elektronika. KRI Diponegoro-365 secara rinci dilengkapi pemasangan lunas kapal (Kiel) 24 Maret 2005, selesai pembuatan/diluncurkan 16 September 2006, mulai bertugas 2 Juli 2007, kemampuan teknis bentuknya dirancang secara flexibility dan affordability sebagai Naval Patrol Vessel, mampu menembus segala cuaca. Kapal ini memiliki daya dorong 2 X 7.400 hp, kemampuan tempur atau persenjataan terdiri dari AAW/Anti Air Warfare (Anti Serangan udara), ASuW/Anti Surface Warfare (Anti kapal atas air), ASW/Anti Submarine Warfare (Anti Kapal Selam, W/Electronic Warfare (Perang Electronika), jumlah personel 80-100 orang.
2.2 Model Dinamika Kapal
Secara umum gerakan yang dialami sebuah kapal ketika melaju di lautan ada 2 macam, yaitu gerakan translasi dan rotasi. Gerak translasi kapal dibagi menjadi tiga, yaitu heave, surge, dan sway. Gerakan translasi pada kapal dapat dilihat pada Gambar 2.
Gambar 2. Gerakan translasi pada kapal
Sedangkan gerak rotasi kapal juga dibagi menjadi tiga macam, yaitu yaw, pitch, dan roll. Gerakan rotasi pada kapal dapat dilihat pada Gambar 3.
Gambar 3. Gerakan rotasi pada kapal
Pada Gambar 3 dapat dilihat keseluruhan gerakan yang dialami oleh kapal, antara lain gerakan yaw adalah gerakan memutar ke samping, gerakan heave adalah gerakan ke atas, gerakan roll adalah gerakan memutar ke bawah, gerakan surge adalah gerakan maju, gerakan sway adalah gerakan ke samping, dan gerakan pitch adalah gerakan memutar ke depan.
Gambar 4 Enam derajad kebebasan dinamika kapal
Tabel 1. Derajat Kebebasan Kapal.Persamaan Rolling dan sistem kemudi kapal akan sesuai berdasarkan beberapa asumsi, yaitu:
a. Distribusi massa homogen dan bidang xz simetris (Ixy = Iyz = 0)
b. Mode heave dan pitch dapat diabaikan ( = = ω = q = 0 )
Kemudian gunakan asumsi diatas ke dalam persamaan : Surge : m(u – νr – xGr2 + ) = X
Sway : m(
ν
&
+ ur + xG - ) = Y Yaw : Iz + mxG(ν
&
+ ur) = NRoll : Iz + mxG(
ν
&
+ ur) = K – WDari persaman diatas telah dilah ditambahkan momen metasentrik pada persamaan roll yang terdapat pada sisi kanan. Seperti pada persamaan berikut
(2.1) Pada model Van Amerongen dan Van Cappelle, sirip dan rudder tampaknya menjadi alternatif yang menarik untuk sistem stabilitas rolling. Oleh karena itu, Van Amerongen dan Van Cappelle (1981) telah mengusulkan suatu model linier eksplisit menjelaskan kopling dalam hal transfer antara sirip dan sudut rudder ke linier dan kecepatan sudut pada sway dan yaw. Berikut ini merupakan persamaan dinamika kapal khusus untuk gerakan rolling dengan menggabungkan model Van Amerongen dan Van Cappelle.
(2.2)
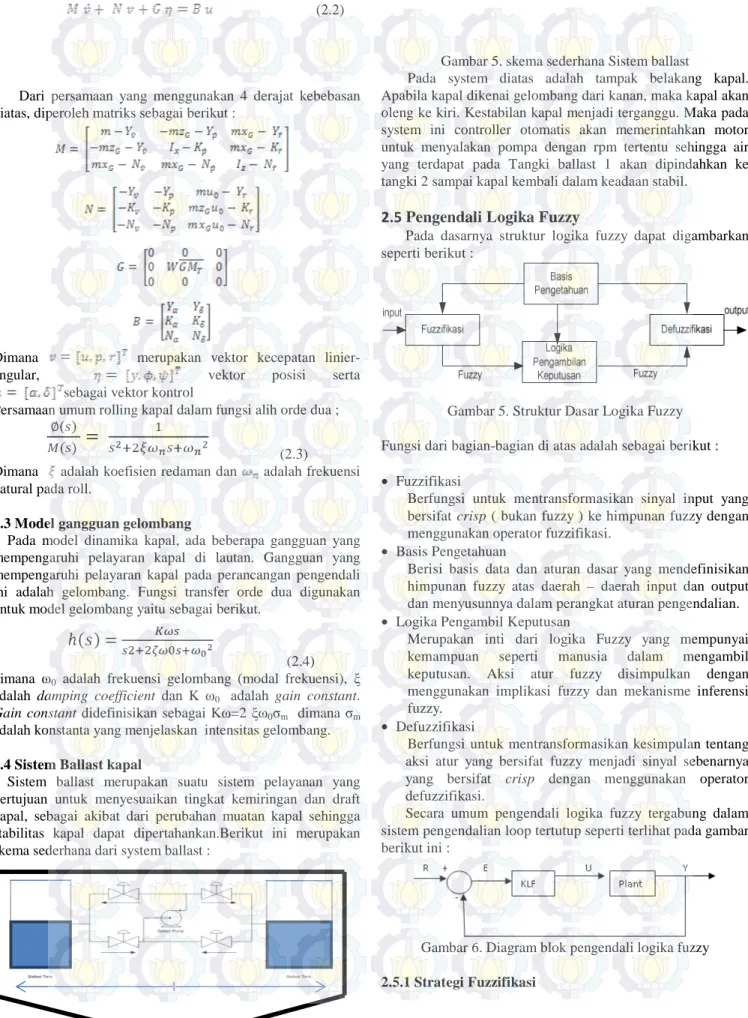
Dari persamaan yang menggunakan 4 derajat kebebasan diatas, diperoleh matriks sebagai berikut :
Dimana merupakan vektor kecepatan linier-
angular, vektor posisi serta
sebagai vektor kontrol
Persamaan umum rolling kapal dalam fungsi alih orde dua ;
(2.3)
Dimana adalah koefisien redaman dan adalah frekuensi natural pada roll.
2.3 Model gangguan gelombang
Pada model dinamika kapal, ada beberapa gangguan yang mempengaruhi pelayaran kapal di lautan. Gangguan yang mempengaruhi pelayaran kapal pada perancangan pengendali ini adalah gelombang. Fungsi transfer orde dua digunakan untuk model gelombang yaitu sebagai berikut.
(2.4) dimana ω0 adalah frekuensi gelombang (modal frekuensi), ξ adalah damping coefficient dan K ω0 adalah gain constant. Gain constant didefinisikan sebagai Kω=2 ξω0σm dimana σm adalah konstanta yang menjelaskan intensitas gelombang.
2.4 Sistem Ballast kapal
Sistem ballast merupakan suatu sistem pelayanan yang bertujuan untuk menyesuaikan tingkat kemiringan dan draft kapal, sebagai akibat dari perubahan muatan kapal sehingga stabilitas kapal dapat dipertahankan.Berikut ini merupakan skema sederhana dari system ballast :
Gambar 5. skema sederhana Sistem ballast
Pada system diatas adalah tampak belakang kapal. Apabila kapal dikenai gelombang dari kanan, maka kapal akan oleng ke kiri. Kestabilan kapal menjadi terganggu. Maka pada system ini controller otomatis akan memerintahkan motor untuk menyalakan pompa dengan rpm tertentu sehingga air yang terdapat pada Tangki ballast 1 akan dipindahkan ke tangki 2 sampai kapal kembali dalam keadaan stabil.
2.5
Pengendali Logika Fuzzy
Pada dasarnya struktur logika fuzzy dapat digambarkan seperti berikut :
Gambar 5. Struktur Dasar Logika Fuzzy Fungsi dari bagian-bagian di atas adalah sebagai berikut : • Fuzzifikasi
Berfungsi untuk mentransformasikan sinyal input yang bersifat crisp ( bukan fuzzy ) ke himpunan fuzzy dengan menggunakan operator fuzzifikasi.
• Basis Pengetahuan
Berisi basis data dan aturan dasar yang mendefinisikan himpunan fuzzy atas daerah – daerah input dan output dan menyusunnya dalam perangkat aturan pengendalian. • Logika Pengambil Keputusan
Merupakan inti dari logika Fuzzy yang mempunyai kemampuan seperti manusia dalam mengambil keputusan. Aksi atur fuzzy disimpulkan dengan menggunakan implikasi fuzzy dan mekanisme inferensi fuzzy.
• Defuzzifikasi
Berfungsi untuk mentransformasikan kesimpulan tentang aksi atur yang bersifat fuzzy menjadi sinyal sebenarnya yang bersifat crisp dengan menggunakan operator defuzzifikasi.
Secara umum pengendali logika fuzzy tergabung dalam sistem pengendalian loop tertutup seperti terlihat pada gambar berikut ini :
Gambar 6. Diagram blok pengendali logika fuzzy
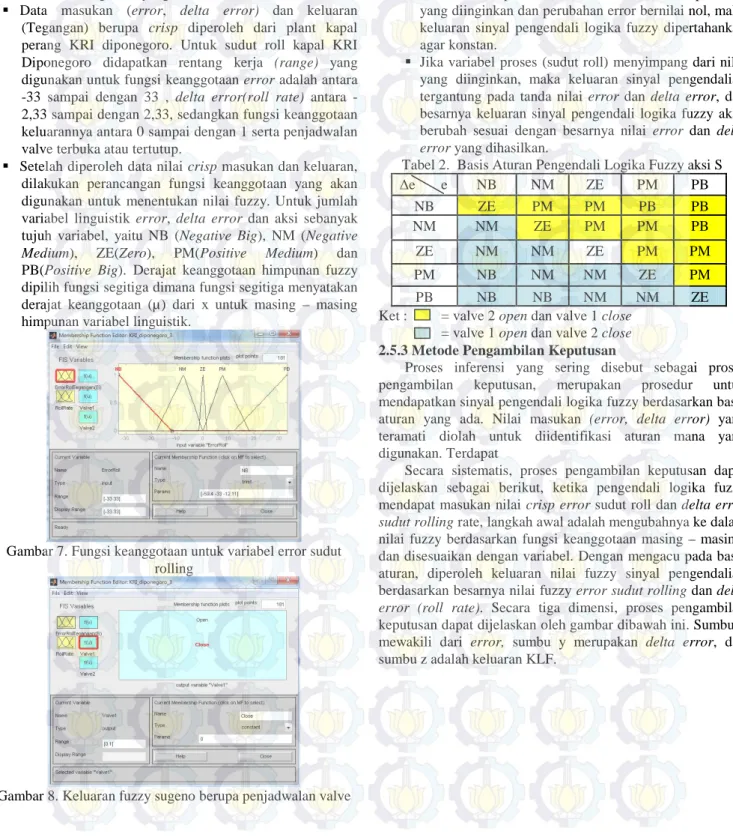
Langkah awal dalam perancangan pengendali logika fuzzy adalah fuzzifikasi. Pada tahap ini, dilakukan pemetaan nilai crisp masukan (variabel terukur error sudut roll dan roll rate) dan keluaran prosentase bukaan valve ke bentuk himpunan fuzzy dalam suatu semesta pembicaraan. Data masukan pada proses pengendalian berbentuk crisp, dan dengan fuzzifikasi ini, nilai crisp yang teramati dipetakan ke nilai fuzzy yang bersesuain dengan rentang kerja (range) setiap variabel masukannya. Kemudian data tersebut akan dikelompokkan ke bentuk variabel linguistik yang sesuai.
Data masukan (error, delta error) dan keluaran (Tegangan) berupa crisp diperoleh dari plant kapal perang KRI diponegoro. Untuk sudut roll kapal KRI Diponegoro didapatkan rentang kerja (range) yang digunakan untuk fungsi keanggotaan error adalah antara 33 sampai dengan 33 , delta error(roll rate) antara -2,33 sampai dengan -2,33, sedangkan fungsi keanggotaan keluarannya antara 0 sampai dengan 1 serta penjadwalan valve terbuka atau tertutup.
Setelah diperoleh data nilai crisp masukan dan keluaran, dilakukan perancangan fungsi keanggotaan yang akan digunakan untuk menentukan nilai fuzzy. Untuk jumlah variabel linguistik error, delta error dan aksi sebanyak tujuh variabel, yaitu NB (Negative Big), NM (Negative Medium), ZE(Zero), PM(Positive Medium) dan PB(Positive Big). Derajat keanggotaan himpunan fuzzy dipilih fungsi segitiga dimana fungsi segitiga menyatakan derajat keanggotaan (µ) dari x untuk masing – masing himpunan variabel linguistik.
Gambar 7. Fungsi keanggotaan untuk variabel error sudut rolling
Gambar 8. Keluaran fuzzy sugeno berupa penjadwalan valve
2.5.2 Perancangan Basis Pengetahuan
Pada Tugas Akhir ini, perancangan basis aturan menggunakan metode pendekatan terhadap sistem rolling kapal. Dimana penyusunan basis aturan berdasarkan pengamatan pengaruh perubahan bukaan valve yang dapat mengalirkan air untuk dipompa terhadap perubahan sudut roll pada sistem stabilias rolling kapal.
Prinsip – prinsip dasar dalam perancangan basis aturan pengendali logika fuzzy digeneralisasikan sebagai berikut :
Jika variabel proses (sudut roll) telah mencapai nilai yang diinginkan dan perubahan error bernilai nol, maka keluaran sinyal pengendali logika fuzzy dipertahankan agar konstan.
Jika variabel proses (sudut roll) menyimpang dari nilai yang diinginkan, maka keluaran sinyal pengendalian tergantung pada tanda nilai error dan delta error, dan besarnya keluaran sinyal pengendali logika fuzzy akan berubah sesuai dengan besarnya nilai error dan delta error yang dihasilkan.
Tabel 2. Basis Aturan Pengendali Logika Fuzzy aksi S
∆e e NB NM ZE PM PB NB ZE PM PM PB PB NM NM ZE PM PM PB ZE NM NM ZE PM PM PM NB NM NM ZE PM PB NB NB NM NM ZE
Ket : = valve 2 open dan valve 1 close = valve 1 open dan valve 2 close
2.5.3 Metode Pengambilan Keputusan
Proses inferensi yang sering disebut sebagai proses pengambilan keputusan, merupakan prosedur untuk mendapatkan sinyal pengendali logika fuzzy berdasarkan basis aturan yang ada. Nilai masukan (error, delta error) yang teramati diolah untuk diidentifikasi aturan mana yang digunakan. Terdapat
Secara sistematis, proses pengambilan keputusan dapat dijelaskan sebagai berikut, ketika pengendali logika fuzzy mendapat masukan nilai crisp error sudut roll dan delta error sudut rolling rate, langkah awal adalah mengubahnya ke dalam nilai fuzzy berdasarkan fungsi keanggotaan masing – masing, dan disesuaikan dengan variabel. Dengan mengacu pada basis aturan, diperoleh keluaran nilai fuzzy sinyal pengendalian berdasarkan besarnya nilai fuzzy error sudut rolling dan delta error (roll rate). Secara tiga dimensi, proses pengambilan keputusan dapat dijelaskan oleh gambar dibawah ini. Sumbu x mewakili dari error, sumbu y merupakan delta error, dan sumbu z adalah keluaran KLF.
Gambar 9. Tampilan tiga dimensi inferensi
2.5.4 Strategi Defuzzifikasi
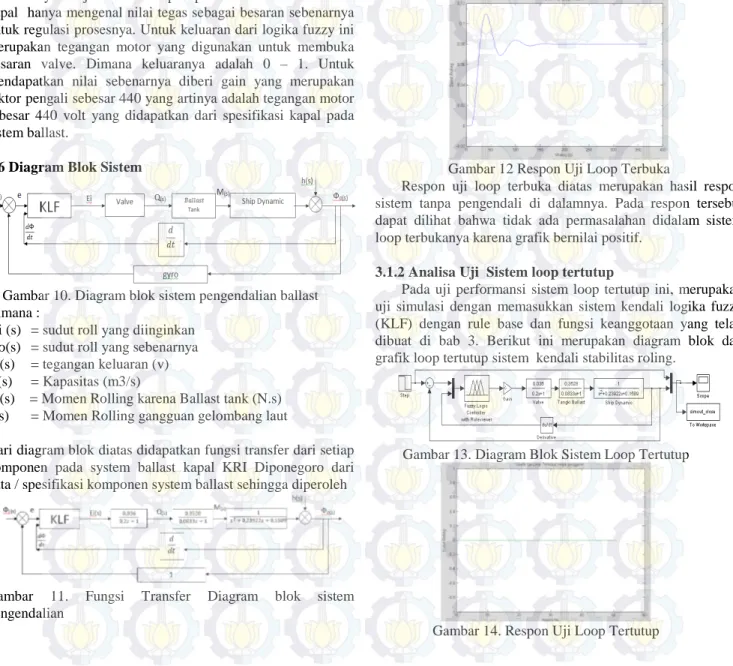
Defuzzifikasi merupakan proses mengubah besaran fuzzy yang disajikan dalam bentuk himpunan fuzzy keluaran dengan fungsi keanggotaannya untuk mendapatkan kembali bentuk data crisp (nilai sebenarnya/ nilai tegas). Proses pengubahan data fuzzy menjadi data crisp diperlukan karena dinamika kapal hanya mengenal nilai tegas sebagai besaran sebenarnya untuk regulasi prosesnya. Untuk keluaran dari logika fuzzy ini merupakan tegangan motor yang digunakan untuk membuka besaran valve. Dimana keluaranya adalah 0 – 1. Untuk mendapatkan nilai sebenarnya diberi gain yang merupakan faktor pengali sebesar 440 yang artinya adalah tegangan motor sebesar 440 volt yang didapatkan dari spesifikasi kapal pada sistem ballast.
2.6 Diagram Blok Sistem
Gambar 10. Diagram blok sistem pengendalian ballast Dimana :
Фi (s) = sudut roll yang diinginkan
Фo(s) = sudut roll yang sebenarnya Ei(s) = tegangan keluaran (v) Q(s) = Kapasitas (m3/s)
M(s) = Momen Rolling karena Ballast tank (N.s) h(s) = Momen Rolling gangguan gelombang laut
Dari diagram blok diatas didapatkan fungsi transfer dari setiap komponen pada system ballast kapal KRI Diponegoro dari data / spesifikasi komponen system ballast sehingga diperoleh
Gambar 11. Fungsi Transfer Diagram blok sistem pengendalian
III. HASIL DAN PEMBAHASAN
3.1 Analisa Data Sistem Pengendalian Stabilitas Rolling
Pada analisa uji sistem pengendalian Stabilitas rolling dilakukan 3 analisa uji. Pertama adalah analisa uji loop terbuka. Pada uji ini bertujuan untuk melihat respon sistem tanpa pengendali. Pada uji yang kedua adalah analisa uji sistem loop tertutup. Pada uji yang ketiga adalah uji sistem loop tertutup dengan menggunakan ganggun gelombang. Gangguan gelombang yang digunakan ada 7 yaitu pada keadaan Calm Water, Smooth Water, Slight Water, Moderate water, Rough Water, Very Rough water, dan High Water.
3.1.1 Analisa Uji Sistem Loop Terbuka
Simulasi model matematis dari kapal kelas Sigma KRI- Diponegoro dibangun pada simulink-Matlab R2009a dengan menggunakan toolbox sehingga mampu merepresentasikan grafik stabilitas rollling kapal. Pada model simulink kapal kelas sigma tersebut akan diberi respon data masukan step sehingga dapat mengetahui respon dari keluaran model yang berupa grafik stabilitas.
Gambar 12 Respon Uji Loop Terbuka
Respon uji loop terbuka diatas merupakan hasil respon sistem tanpa pengendali di dalamnya. Pada respon tersebut dapat dilihat bahwa tidak ada permasalahan didalam sistem loop terbukanya karena grafik bernilai positif.
3.1.2 Analisa Uji Sistem loop tertutup
Pada uji performansi sistem loop tertutup ini, merupakan uji simulasi dengan memasukkan sistem kendali logika fuzzy (KLF) dengan rule base dan fungsi keanggotaan yang telah dibuat di bab 3. Berikut ini merupakan diagram blok dan grafik loop tertutup sistem kendali stabilitas roling.
Gambar 13. Diagram Blok Sistem Loop Tertutup
Pada respon uji loop tertutup diatas, dapat dilihat bahwa grafik yang dihasilkan adalah stabil di sudut 0°. Hal ini dikarenakan pada uji loop terbuka ini sistem stabilitas rolling yang telah dirancang menggunakan metode logika fuzzy tidak mendapat gangguan apapun. Pada simulasi sistem stabilitas rolling ini, sudut rolling yang diinginkan adalah 0°. Oleh karena itu masukan yang diberikan pada simulasi di setiap diagram blok adalah 0. Sehingga keluaran pada diagram blok sistem loop terbuka ini sesuai yang diinginkan.
3.1.3 Analisa Uji Sumulasi dengan Gangguan Gelombang
Pada tugas akhir ini, untuk menguji apakah sistem kendali yang sudah dirancang yang sesuai dengan spesifikasi kapal atau tidak dapat diketahui ketika sistem diberi gangguan berupa gelombang. Pada Simulasi dengan gangguan gelombang ini, pada grafik akan diperoleh Maximum Overshoot (Mp), Peak Time (Tp), Rise Time (Tr), Settling Time (Ts), dan Error Steady state (Ess). Berikut ini merupakan sea state gelombang.
Tabel 3. Sea State Gelombang
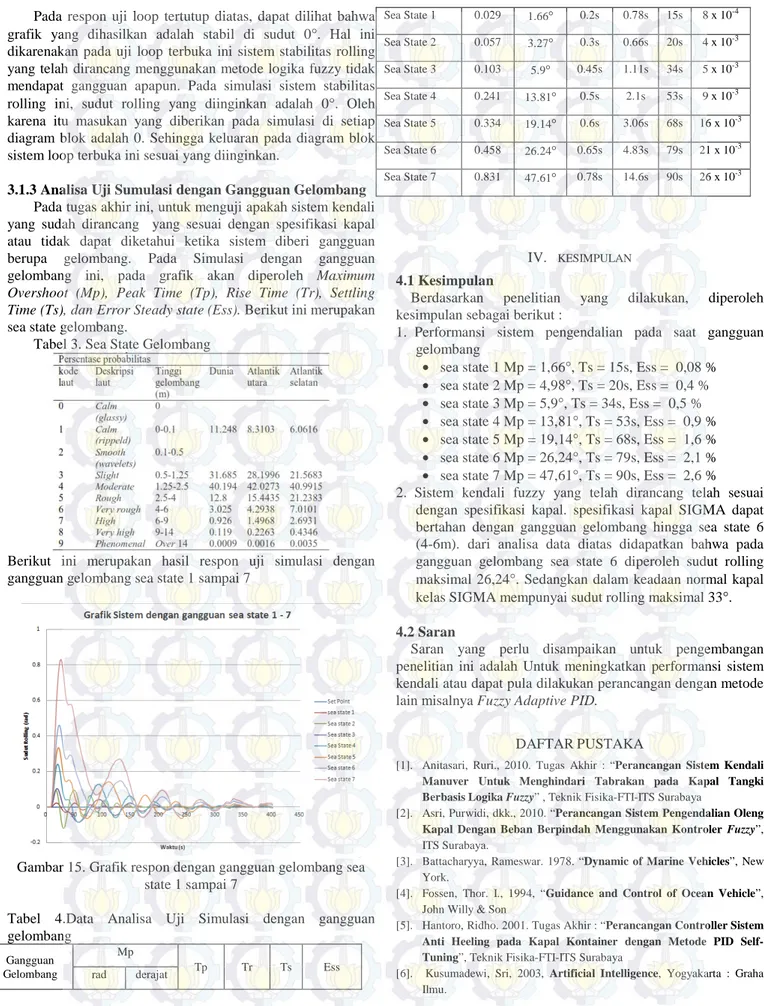
Berikut ini merupakan hasil respon uji simulasi dengan gangguan gelombang sea state 1 sampai 7
Gambar 15. Grafik respon dengan gangguan gelombang sea state 1 sampai 7
Tabel 4.Data Analisa Uji Simulasi dengan gangguan gelombang Gangguan Gelombang Mp Tp Tr Ts Ess rad derajat Sea State 1 0.029 1.66° 0.2s 0.78s 15s 8 x 10-4 Sea State 2 0.057 3.27° 0.3s 0.66s 20s 4 x 10-3 Sea State 3 0.103 5.9° 0.45s 1.11s 34s 5 x 10-3 Sea State 4 0.241 13.81° 0.5s 2.1s 53s 9 x 10-3 Sea State 5 0.334 19.14° 0.6s 3.06s 68s 16 x 10-3 Sea State 6 0.458 26.24° 0.65s 4.83s 79s 21 x 10-3 Sea State 7 0.831 47.61° 0.78s 14.6s 90s 26 x 10-3 IV. KESIMPULAN 4.1 Kesimpulan
Berdasarkan penelitian yang dilakukan, diperoleh kesimpulan sebagai berikut :
1. Performansi sistem pengendalian pada saat gangguan gelombang
• sea state 1 Mp = 1,66°, Ts = 15s, Ess = 0,08 % • sea state 2 Mp = 4,98°, Ts = 20s, Ess = 0,4 % • sea state 3 Mp = 5,9°, Ts = 34s, Ess = 0,5 % • sea state 4 Mp = 13,81°, Ts = 53s, Ess = 0,9 % • sea state 5 Mp = 19,14°, Ts = 68s, Ess = 1,6 % • sea state 6 Mp = 26,24°, Ts = 79s, Ess = 2,1 % • sea state 7 Mp = 47,61°, Ts = 90s, Ess = 2,6 % 2. Sistem kendali fuzzy yang telah dirancang telah sesuai
dengan spesifikasi kapal. spesifikasi kapal SIGMA dapat bertahan dengan gangguan gelombang hingga sea state 6 (4-6m). dari analisa data diatas didapatkan bahwa pada gangguan gelombang sea state 6 diperoleh sudut rolling maksimal 26,24°. Sedangkan dalam keadaan normal kapal kelas SIGMA mempunyai sudut rolling maksimal 33°.
4.2 Saran
Saran yang perlu disampaikan untuk pengembangan penelitian ini adalah Untuk meningkatkan performansi sistem kendali atau dapat pula dilakukan perancangan dengan metode lain misalnya Fuzzy Adaptive PID.
DAFTARPUSTAKA
[1]. Anitasari, Ruri., 2010. Tugas Akhir : “Perancangan Sistem Kendali
Manuver Untuk Menghindari Tabrakan pada Kapal Tangki Berbasis Logika Fuzzy” , Teknik Fisika-FTI-ITS Surabaya
[2]. Asri, Purwidi, dkk., 2010. “Perancangan Sistem Pengendalian Oleng
Kapal Dengan Beban Berpindah Menggunakan Kontroler Fuzzy”,
ITS Surabaya.
[3]. Battacharyya, Rameswar. 1978. “Dynamic of Marine Vehicles”, New York.
[4]. Fossen, Thor. I., 1994, “Guidance and Control of Ocean Vehicle”, John Willy & Son
[5]. Hantoro, Ridho. 2001. Tugas Akhir : “Perancangan Controller Sistem
Anti Heeling pada Kapal Kontainer dengan Metode PID Self-Tuning”, Teknik Fisika-FTI-ITS Surabaya
[6]. Kusumadewi, Sri, 2003, Artificial Intelligence, Yogyakarta : Graha Ilmu.
[7]. Gunterus, 1994, Falsafah Dasar Sistem Pengendalian Proses, Jakarta : Elex Media Komputindo.
[8]. Ogata, K., 1992. “Modern Control Engineering”, Second Ed, Prentice Hall,
[9]. Edwar V. Lewis, 1989 “Principles of Naval Architecture”, second ed, Vol III, New Jersey
[10]. Jovanoski & Robinson, “Ship stability and Parametric Rolling”, UNSW Canberra