4 STABILITAS STATIS KAPAL POLE AND LINE SULAWESI SELATAN
4.1 Pendahuluan
Masalah teknis yang perlu diperhatikan dalam penentuan perencanaan pembangunan kapal ikan, adalah agar hasil dari pembangunan kapal tersebut terjamin kestabilannya pada saat dioperasikan di laut. Stabilitas merupakan hal terpenting bagi pelayaran kapal sewaktu digunakan untuk operasi penangkapan ikan, karena pada kapal ikan dilakukan kerja operasi pada berbagai kondisi cuaca dalam batas-batas kemampuannya.
Menurut Fyson (1985), stabilitas kapal dapat diartikan sebagai kemampuan sebuah kapal untuk dapat kembali ke posisi semula (tegak) setelah menjadi miring akibat bekerjanya gaya dari luar maupun dari dalam kapal tersebut atau setelah mengalami momen temporal.
Kok et.al. (1983) mengemukakan bahwa, selama berada di laut kapal akan mendapat sejumlah gaya yang terdiri dari: 1) berat kapal dan muatan; 2) gaya tekan air ke atas; 3) pengaruh gelombang dan tekanan air; 4) gaya-gaya dari massa yang bekerja pada kapal; 5) pembagian muatan asimetris; 6) gaya-gaya torsi yang disebabkan oleh tidak samanya waktu oleng bagian depan dan bagian belakang dan 7) gaya-gaya penggerak beban kemudi.
Stabilitas pada sebuah kapal dipengaruhi oleh letak titik-titik konsentrasi gaya yang bekerja pada kapal tersebut. Ketiga titik tersebut adalah titik B (centre of bouyancy) yakni titik khayal yang merupakan pusat seluruh gaya apung pada kapal yang bekerja vertikal ke atas. Titik kedua adalah titik G (centre of gravity) yakni titik khayal yang merupakan pusat seluruh gaya berat pada kapal yang bekerja vertikal ke bawah. Titik ketiga adalah titik M (metacentre) yakni titik khayal yang merupakan titik potong dari garis khayal yang melalui titik B dan titik G saat kapal berada pada posisi tegak dengan garis khayal yang melalui kedua titik tersebut pada saat kapal berada pada posisi miring akibat bekerjanya gaya-gaya pada kapal. Titik M juga merupakan tinggi maksimum bagi titik G (Taylor, 1977 dan Hind, 1982)
Terminologi equilibrium pada permasalahan stabilitas perlu diketahui.
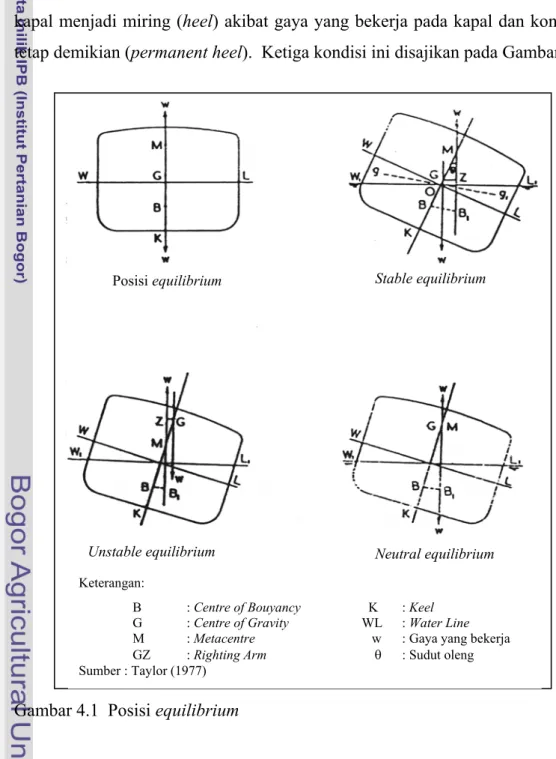
Pada dasarnya terdapat tiga jenis equilibrium yakni stable equilibrium, unstable equilibrium dan neutral equilibrium (Taylor, 1977; Gillmer & Johnson, 1982 ; Hind, 1982; Derret, 1991). Stable equilibrium adalah suatu kondisi dimana kapal dapat kembali ke posisi tegak semulanya (initial stability/equilibrium) setelah gaya yang bekerja pada kapal menyebabkan kapal menjadi miring (heel).
Unstable equilibrium adalah kondisi dimana kapal menjadi miring (heel) akibat gaya yang bekerja pada kapal dan tidak kembali ke posisi awalnya melainkan terus ke arah kemiringan tersebut. Neutral equilibrium adalah kondisi dimana kapal menjadi miring (heel) akibat gaya yang bekerja pada kapal dan kondisi ini tetap demikian (permanent heel). Ketiga kondisi ini disajikan pada Gambar 4.1.
Gambar 4.1 Posisi equilibrium
Keterangan:
B : Centre of Bouyancy K : Keel G : Centre of Gravity WL : Water Line M : Metacentre w : Gaya yang bekerja GZ : Righting Arm θ : Sudut oleng Sumber : Taylor (1977)
Posisi equilibrium Stable equilibrium
Unstable equilibrium Neutral equilibrium
Stabilitas kapal dibagi dalam stabilitas statis dan stabilitas dinamis.
Stabilitas statis (initial stability) adalah stabilitas kapal yang diukur pada kondisi air tenang dengan beberapa sudut keolengan pada nilai ton displacement yang berbeda. Nilai stabilitas statis kapal ditunjukkan oleh nilai lengan penegak (GZ).
Stabilitas dinamis adalah stabilitas kapal yang diukur dengan jalan memberikan suatu “usaha” pada kapal sehingga membentuk sudut keolengan tertentu.
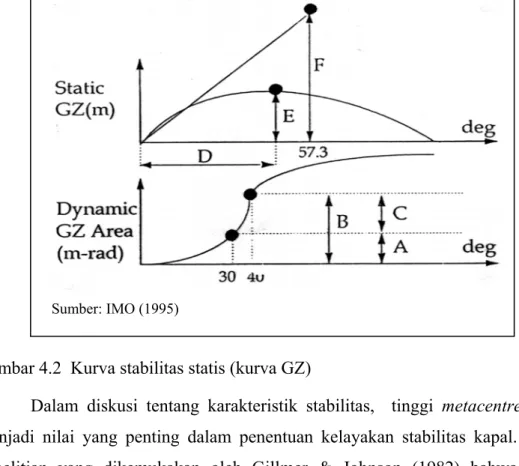
International Maritime Organization (IMO) pada Torremolinos International Convention for The Safety of Fishing Vessels–regulation 28 (1977) mengeluarkan standar kriteria stabilitas kapal melalui kurva GZ (Gambar 4.2), yaitu:
1) Luas area di bawah kurva GZ tidak boleh kurang dari 0.055 m.rad hingga sudut oleng 300 (A) dan tidak kurang dari 0.090 m.rad sampai sudut oleng 400 (B) atau sudut flooding θf jika sudutnya kurang dari 400.
Area di bawah kurva GZ antara sudut oleng 300 dan 400 atau antara 300 dan θf , jika sudut ini kurang dari 400 tidak boleh kurang dari 0.030 m.rad (C).
2) Lengan penegak (righting lever) GZ minimum 200 mm pada sudut oleng sama atau lebih besar dari 300 (E). Lengan penegak maksimum, GZmax sebaiknya dicapai pada sudut oleng 300 tetapi tidak kurang dari 250.
3) Tinggi metacentre (GM) awal tidak boleh kurang dari 350 mm untuk kapal dengan dek tunggal. Pada kapal dengan superstructure yang lengkap atau kapal dengan panjang > 70 m, GM dapat dikurangi untuk kelayakan administrasi tetapi tidak boleh kurang dari 150 mm (F).
Gambar 4.2 Kurva stabilitas statis (kurva GZ)
Dalam diskusi tentang karakteristik stabilitas, tinggi metacentre (GM) menjadi nilai yang penting dalam penentuan kelayakan stabilitas kapal. Hasil penelitian yang dikemukakan oleh Gillmer & Johnson (1982) bahwa, kapal dengan nilai GM yang besar menjadi tidak nyaman dibandingkan kapal dengan GM kecil.
IMO (1995) dalam resolution A.749 (18) memberikan kriteria umum untuk nilai GM awal dan GM minimal kapal ikan. Untuk kapal ikan dengan single deck, GM awal (GM0) tidak boleh kurang dari 0.35 m. Kapal dengan superstructure yang lengkap atau kapal dengan panjang lebih dari 70 m, nilai GM dapat dikurangi sesuai aturan administrasi kapal tetapi tidak boleh kurang dari 0.15 m.
Taylor (1977) dan Hind (1982) menyatakan bahwa stabilitas sebuah kapal dipengaruhi oleh letak ketiga titik konsentrasi gaya yang bekerja pada kapal tersebut. Ketiga titik tersebut adalah titik B (centre of bouyancy), titik G (centre of gravity) dan titik M (metacentre). Selanjutnya Hind (1982) mengemukakan, posisi titik G bergantung dari distribusi muatan dan posisi titik B bergantung pada bentuk kapal yang terendam di dalam air.
Sumber: IMO (1995)
Stabilitas kapal terkait erat dengan distribusi muatan dan perhitungan nilai lengan penegak (GZ). Perbedaan distribusi muatan yang terjadi pada setiap kondisi pemuatan akan mengakibatkan terjadinya perubahan pada nilai KG, yaitu jarak vertikal antara titik K (keel) dan titik G (centre of gravity) yang selanjutnya akan mempengaruhi nilai lengan penegak (GZ) yang terbentuk.
Pada kapal pole and line, stabilitas amat bergantung pada distribusi muatan yang ada di atas kapal karena terjadinya perubahan-perubahan titik berat pada setiap kondisi pemuatan. Pada saat kapal berangkat ke daerah penangkapan, muatan yang ada padanya berbeda dengan pada saat kapal kembali dari daerah penangkapan.
Berdasarkan hal tersebut, penelitian ini dilakukan untuk: (1) mengetahui nilai KG pada kondisi pemuatan yang berbeda terhadap empat kelompok kapal, (2) menganalisis nilai GZ yang terbentuk pada setiap perubahan nilai KG, (3) menganalisis kelayakan stabilitas statis keempat kelompok kapal pole and line.
4.2 Bahan dan Metode 4.2.1 Data yang Digunakan
Data yang digunakan untuk analisis stabilitas statis adalah empat kapal pole and line sampel yang dianggap mewakili seluruh kapal pole and line sampel yang telah dibahas pada Bagian 2 tulisan ini, yaitu:
1) K-A dengan bentuk badan kapal round sharp bottom 2) K-B dengan bentuk badan kapal round flat bottom 3) K-C dengan bentuk badan kapal U-V bottom 4) K-D dengan bentuk badan kapal round bottom.
4.2.2 Analisis Data
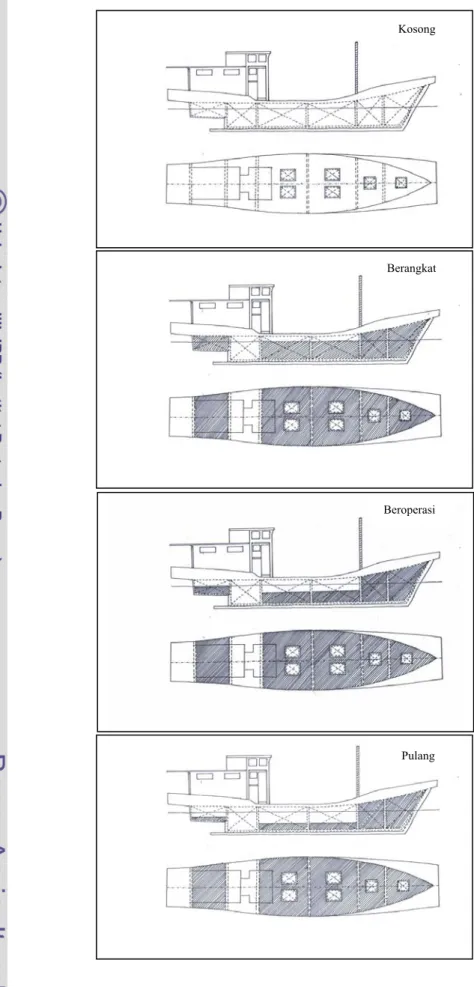
Perhitungan stabilitas kapal pole and line sampel meliputi analisis terhadap perkiraan perubahan nilai KG pada empat kondisi distribusi muatan terhadap empat bentuk badan kapal. Keempat kondisi distribusi muatan tersebut yang diterakan pada Tabel 4.1 dan Gambar 4.3, masing-masing adalah:
1) Kondisi kapal kosong; pada kondisi ini bahan bakar, umpan hidup dan muatan diasumsikan kosong (0%).
2) Kondisi kapal berangkat; pada kondisi ini bahan bakar, umpan hidup disumsikan penuh (100%) dan muatan kosong (0%).
3) Kondisi kapal beroperasi; pada kondisi ini bahan bakar diasumsikan setengah penuh (50%), umpan hidup seperempat penuh (25%) dan muatan tigaperempat penuh (75%).
4) Kondisi kapal pulang; pada kondisi ini bahan bakar diasumsikan seperempat penuh (25%), umpan hidup 10% dan muatan penuh 100%.
Tabel 4.1 Berbagai kondisi distribusi muatan kapal untuk analisis stabilitas
No. Kondisi Kapal
Distribusi Berat (%)
Bahan Bakar Umpan Muatan (Ikan)
1. Kapal Kosong 0 0 0
2. Kapal Berangkat 100 100 0
3. Kapal Beroperasi 50 25 75
4. Kapal Pulang 25 10 100
Perubahan nilai KG dianalisis dengan membuat perkiraan perubahan jarak vertikal – horizontal pada setiap kondisi perubahan distribusi muatan. Hasil perhitungan perubahan nilai KG disajikan pada Lampiran 4.1. Nilai KG diperoleh dengan menggunakan formula berikut (Hind, 1982):
∆
= moment of ∆Z
KG ……… 4-1
dimana: ∆Z adalah momen vertikal
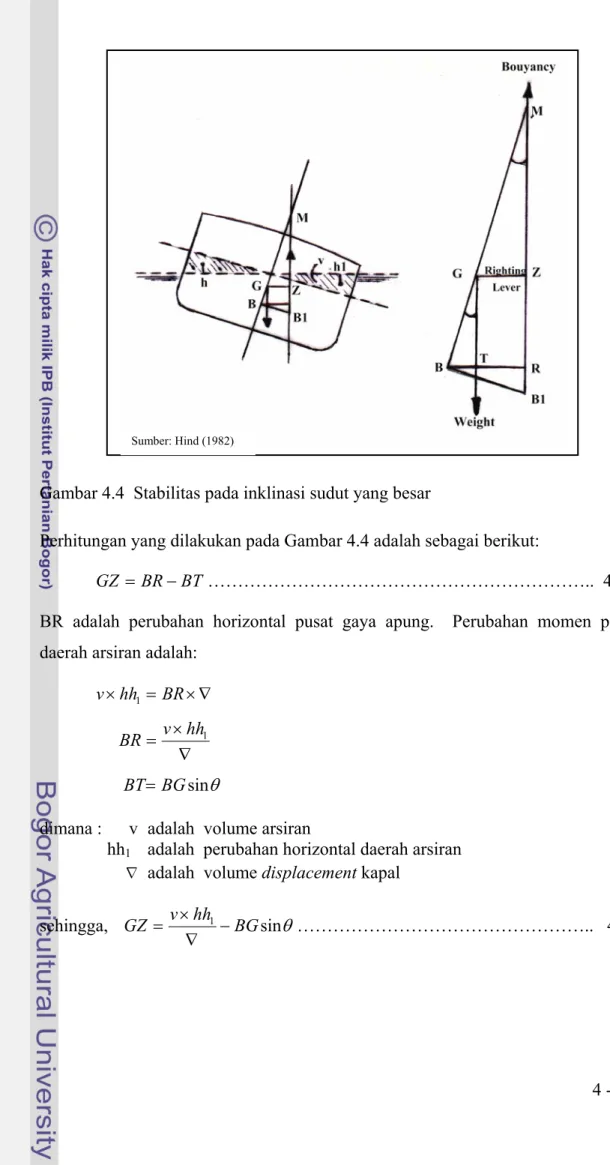
Analisis stabilitas statis melalui kurva stabilitas statis GZ dilakukan dengan metode Attwood’s Formula (Hind, 1982). Metode ini menganalisis stabilitas statis kapal pada sudut keolengan 0O - 90O. Nilai lengan penegak GZ diperoleh dengan cara yang digambarkan pada Gambar 4.4.
Gambar 4.3 Empat kondisi distribusi muatan pada kapal
Kosong
Berangkat
Beroperasi
Pulang
Gambar 4.4 Stabilitas pada inklinasi sudut yang besar
Perhitungan yang dilakukan pada Gambar 4.4 adalah sebagai berikut:
BT BR
GZ = − ……….. 4-2
BR adalah perubahan horizontal pusat gaya apung. Perubahan momen pada daerah arsiran adalah:
∇
×
=
×hh BR v 1
∇
= v×hh1 BR
BT=BGsinθ
dimana : v adalah volume arsiran
hh1 adalah perubahan horizontal daerah arsiran ∇ adalah volume displacement kapal
sehingga, v hh1 BGsinθ
GZ −
∇
= × ……….. 4-3
Sumber: Hind (1982)
Kurva stabilitas statis GZ menggambarkan tinggi lengan penegak GZ pada sudut keolengan 0O–80O. Berdasarkan kurva GZ, selanjutnya dilakukan analisis terhadap beberapa sudut keolengan.
Hasil perhitungan stabilitas kemudian dibandingkan dengan standar stabilitas kapal yang dikeluarkan oleh United Kingdom Regulations [The Fishing Vessels (Safety Provision) Rules,1975] (Hind, 1982) dan International Maritime Organization (IMO) pada Torremolinos International Convention for The Safety of Fishing Vessels–regulation 28 (1977) melalui kurva GZ. Kriteria stabilitas yang digunakan disajikan pada Gambar 4.2.
Nilai-nilai yang diperoleh dari hasil analisis stabilitas statis, selanjutnya akan digunakan untuk menganalisis stabilitas dinamis kapal pole and line sampel yang akan dibahas pada Bagian 5 tulisan ini.
4.3 Hasil
4.3.1 Nilai KG Kapal Pole and Line Sampel pada Berbagai Kondisi Muatan Berdasarkan pengelompokan bentuk, empat bentuk kapal pole and line sampel yang selanjutnya disebut dengan K-A, K-B, K-C dan K-D dianalisis untuk memperoleh nilai KG pada empat kondisi distribusi muatan, masing-masing sebagai berikut:
Hasil perhitungan terhadap nilai KG kapal yang dibuat pada empat kondisi muatan disajikan pada Tabel 4.2 dan perhitungan perubahan nilai KG akibat perubahan distribusi muatan di atas kapal diterakan pada Lampiran 4.1.
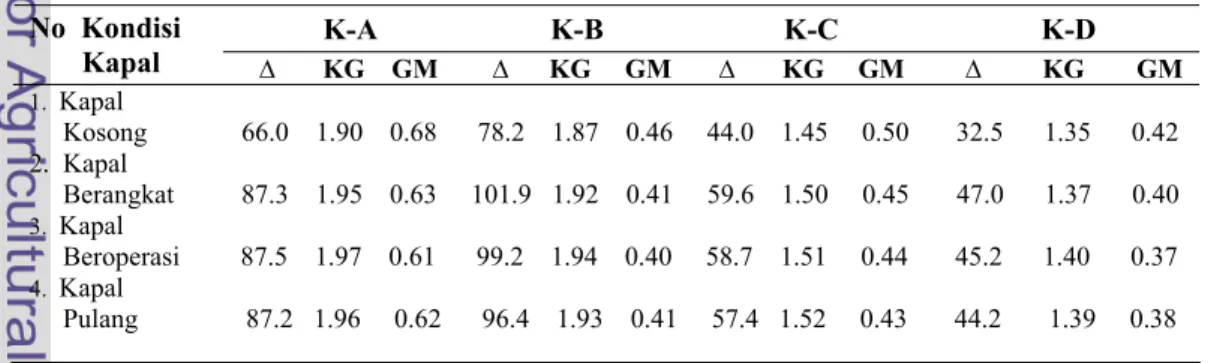
Tabel 4.2 Hasil perhitungan perkiraan nilai KG, ton displacement (∆) dan GM pada empat kondisi distribusi muatan
K-A K-B K-C K-D No Kondisi
Kapal ∆ KG GM ∆ KG GM ∆ KG GM ∆ KG GM 1. Kapal
Kosong 66.0 1.90 0.68 78.2 1.87 0.46 44.0 1.45 0.50 32.5 1.35 0.42 2. Kapal
Berangkat 87.3 1.95 0.63 101.9 1.92 0.41 59.6 1.50 0.45 47.0 1.37 0.40 3. Kapal
Beroperasi 87.5 1.97 0.61 99.2 1.94 0.40 58.7 1.51 0.44 45.2 1.40 0.37 4. Kapal
Pulang 87.2 1.96 0.62 96.4 1.93 0.41 57.4 1.52 0.43 44.2 1.39 0.38
Analisis nilai KG dilakukan berdasarkan hasil perkiraan perubahan distribusi muatan pada empat kondisi pemuatan seperti yang diterakan pada Lampiran 4.1. Dari hasil analisis tersebut terlihat bahwa nilai KG kapal akan berubah jika terjadi perubahan distribusi muatan Jika nilai ton displacement bertambah maka nilai KG kapal akan semakin besar tetapi nilai GMnya menjadi lebih kecil. Umumnya nilai KG tertinggi pada keseluruhan kapal sampel berada pada kondisi kapal beroperasi yaitu pada kondisi bahan bakar diasumsikan setengah penuh (50%), umpan hidup satu per empat penuh (25%) dan muatan tiga per empat penuh (75%).
Kapal sampel K-A dengan bentuk round sharp dan K-B dengan bentuk round flat memiliki nilai KG yang lebih tinggi dibandingkan kedua kapal sampel lainnya, karena nilai ton displacement kedua kapal tersebut juga lebih besar.
4.3.2 Nilai Lengan Penegak GZ Kapal Pole and Line Sampel
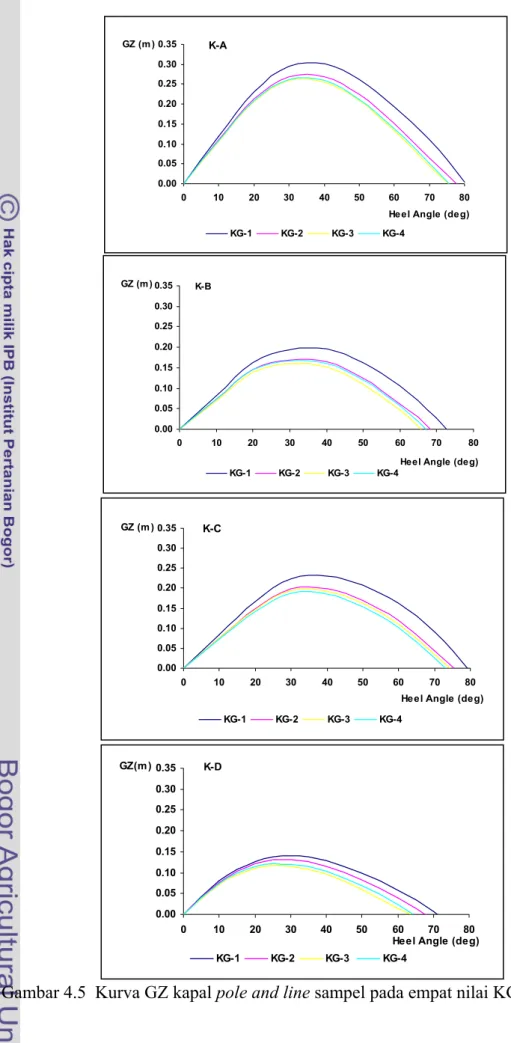
Stabilitas statis keempat kapal sampel diukur dengan menghitung nilai lengan penegak (GZ) yang terbentuk pada kurva GZ. Pada kurva GZ ditunjukkan nilai GZ pada berbagai sudut keolengan (00 – 800). Kurva stabilitas statis kapal pole and line sampel pada berbagai kondisi distribusi muatan disajikan pada Gambar 4.5.
Nilai lengan penegak GZ yang terbentuk pada kurva GZ berbanding terbalik dengan nilai KG. Pada kurva tersebut terlihat bahwa semakin tinggi nilai KG maka nilai GZ akan semakin rendah, demikian pula sebaliknya. Dari keempat bentuk kapal yang ada, kapal K-A dengan bentuk badan round-sharp bottom memiliki nilai GZ yang lebih tinggi dibandingkan kapal sampel dengan bentuk badan kapal yang lain.
Nilai lengan penegak GZ menunjukkan nilai stabilitas suatu kapal. Nilai ini memiliki standar yang ditetapkan oleh IMO seperti yang telah dijelaskan pada Gambar 4.2. Hasil perhitungan stabilitas kapal pole and line sampel yang diterakan pada Tabel 4.3 sampai Tabel 4.6, menunjukkan bahwa seluruh nilai lengan penegak GZ kapal pole and line sampel memiliki nilai lebih besar dibandingkan nilai minimum yang ditetapkan oleh IMO.
Gambar 4.5 Kurva GZ kapal pole and line sampel pada empat nilai KG
K-A
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35
0 10 20 30 40 50 60 70 80
Heel Angle (deg) GZ (m )
KG-1 KG-2 KG-3 KG-4
K-B
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35
0 10 20 30 40 50 60 70 80
Heel Angle (deg) GZ (m )
KG-1 KG-2 KG-3 KG-4
K-C
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35
0 10 20 30 40 50 60 70 80
Heel Angle (deg) GZ (m )
KG-1 KG-2 KG-3 KG-4
K-D
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35
0 10 20 30 40 50 60 70 80
Heel Angle (deg) GZ(m)
KG-1 KG-2 KG-3 KG-4
Tabel 4.3 Nilai kriteria stabilitas kapal pole and line K-A dan nilai standar IMO
Kondisi Distribusi Muatan Nilai Pada Standar IMO
Kurva GZ (Nilai Minimum) 1 2 3 4 A (0-300) 0.005 m-rad 0.087 0.081 0.078 0.079 B (0-400) 0.090 m-rad 0.140 0.128 0.124 0.125 C (30-400) 0.030 m-rad 0.052 0.047 0.045 0.046 D (sudut GZmax) 30 deg 37 36 36 36 E (GZmin) 0.2 m 0.305 0.280 0.263 0.267 F (GM) 0.15 m 0.680 0.630 0.610 0.620
Tabel 4.4 Nilai kriteria stabilitas kapal pole and line K-B dan nilai standar IMO
Kondisi Distribusi Muatan Nilai Pada Standar IMO
Kurva GZ (Nilai Minimum) 1 2 3 4 A (0-300) 0.005 m-rad 0.061 0.054 0.052 0.053 B (0-400) 0.090 m-rad 0.095 0.083 0.079 0.082 C (30-400) 0.030 m-rad 0.035 0.029 0.028 0.029 D (sudut GZmax) 30 deg 37 36 35 35 E (GZmin) 0.2 m 0.200 0.170 0.160 0.170 F (GM) 0.15 m 0.460 0.410 0.400 0.410
Tabel 4.5 Nilai kriteria stabilitas kapal pole and line K-C dan nilai standar IMO
Kondisi Distribusi Muatan Nilai Pada Standar IMO
Kurva GZ (Nilai Minimum) 1 2 3 4 A (0-300) 0.005 m-rad 0.064 0.057 0.056 0.055 B (0-400) 0.090 m-rad 0.105 0.093 0.091 0.088 C (30-400) 0.030 m-rad 0.041 0.036 0.035 0.033 D (sudut GZmax) 30 deg 37 35 35 35 E (GZmin) 0.2 m 0.240 0.210 0.200 0.200 F (GM) 0.15 m 0.500 0.450 0.440 0.430
Tabel 4.6 Nilai kriteria stabilitas kapal pole and line K-D dan nilai standar IMO
Kondisi Distribusi Muatan Nilai Pada Standar IMO
Kurva GZ (Nilai Minimum) 1 2 3 4
A (0-300) 0.005 m-rad 0.049 0.047 0.043 0.044 B (0-400) 0.090 m-rad 0.073 0.069 0.061 0.064 C (30-400) 0.030 m-rad 0.023 0.022 0.019 0.019 D (sudut GZmax) 30 deg 30 30 30 30 E (GZmin) 0.2 m 0.140 0.130 0.120 0.120 F (GM) 0.15 m 0.420 0.400 0.370 0.380
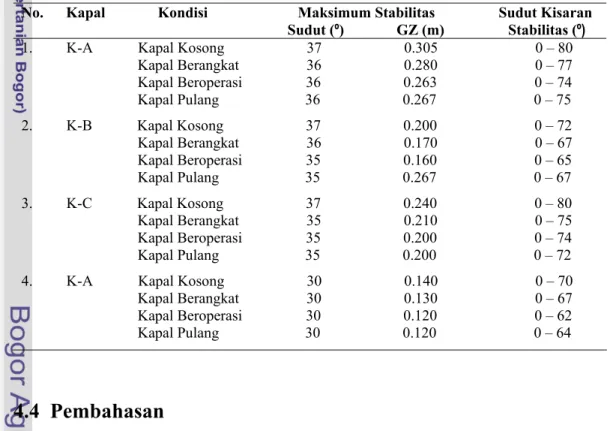
Berdasarkan kurva stabilitas, diperoleh nilai stabilitas maksimum dan kisaran stabilitas yang diterakan pada Tabel 4.7. Stabilitas maksimum adalah nilai GZ maksimum yang dapat dicapai oleh kapal pada kondisi tertentu dan terjadi pada besar sudut tertentu. Kisaran stabilitas merupakan sudut terbesar kemiringan kapal tanpa terjadinya nilai GZ yang negatif. Besar sudut ini diketahui dari titik potong kurva GZ dengan sumbu X (axis), dimana nilai GZ sama dengan 0 dan disebut dengan angle of vanishing stability.
Tabel 4.7 Nilai maksimum dan kisaran stabilitas kapal pole and line sampel
No. Kapal Kondisi Maksimum Stabilitas Sudut Kisaran Sudut (º) GZ (m) Stabilitas (º) 1. K-A Kapal Kosong 37 0.305 0 – 80 Kapal Berangkat 36 0.280 0 – 77 Kapal Beroperasi 36 0.263 0 – 74 Kapal Pulang 36 0.267 0 – 75 2. K-B Kapal Kosong 37 0.200 0 – 72 Kapal Berangkat 36 0.170 0 – 67 Kapal Beroperasi 35 0.160 0 – 65 Kapal Pulang 35 0.267 0 – 67 3. K-C Kapal Kosong 37 0.240 0 – 80 Kapal Berangkat 35 0.210 0 – 75 Kapal Beroperasi 35 0.200 0 – 74 Kapal Pulang 35 0.200 0 – 72 4. K-A Kapal Kosong 30 0.140 0 – 70 Kapal Berangkat 30 0.130 0 – 67 Kapal Beroperasi 30 0.120 0 – 62 Kapal Pulang 30 0.120 0 – 64
4.4 Pembahasan 4.4.1 Nilai KG Kapal
Sebuah kapal dapat dikatakan stabil apabila kapal tersebut dapat kembali menjadi tegak setelah mengalami momen kemiringan. Stabilitas pada kapal ikan amat bergantung dari distribusi muatan yang ada pada kapal tersebut.
Taylor (1977) dan Hind (1982) menyatakan bahwa stabilitas sebuah kapal dipengaruhi oleh letak ketiga titik konsentrasi gaya yang bekerja pada kapal tersebut. Ketiga titik tersebut adalah titik B (centre of bouyancy), titik G (centre of gravity) dan titik M (metacentre). Selanjutnya Hind (1982) mengemukakan bahwa posisi titik G bergantung dari distribusi muatan dan posisi titik B bergantung pada bentuk kapal yang terendam di dalam air.
Saat kapal berangkat menuju daerah penangkapan, muatan pada kapal pole and line terdiri atas perbekalan, bahan bakar dan bak umpan hidup yang terisi penuh. Pada saat kembali, muatan-muatan tersebut akan berkurang tetapi palkah ikan akan terisi oleh hasil tangkapan. Hal ini menyebabkan perubahan titik berat pada kapal, sehingga letak titik G (centre of gravity) kapal akan berubah.
Titik berat (G) pada sebuah kapal merupakan titik tangkap dari sebuah titik pusat seluruh gaya berat yang menekan ke bawah. Letak titik G dapat ditentukan dengan meninjau semua pembagian berat yang berada di atas kapal terhadap lunas kapal. Letak titik berat di atas lunas (KG) akan mempengaruhi besar kecilnya nilai lengan penengak GZ yang terbentuk pada saat kapal mengalami keolengan.
Berdasarkan hasil perkiraan perubahan distribusi muatan pada keempat bentuk kapal (K-A, K-B, K-C dan K-D) yang diterakan pada Tabel 4.2 memperlihatkan bahwa nilai KG kapal akan berubah jika terjadi perubahan berat dan distribusi muatan. Hal ini juga dijelaskan oleh (Hind, 1982) bahwa penambahan dan perpindahan muatan pada kapal dapat mengakibatkan perubahan nilai displacement, draft, posisi G, posisi B, posisi M dan trim fore dan aft.
Dari Tabel 4.2 diketahui bahwa, perubahan nilai ton displacement berpengaruh terhadap nilai KG kapal tetapi tidak menentukan peningkatan dan penurunan nilai tersebut. Peningkatan dan penurunan nilai KG bergantung kepada distribusi muatan yang ada di atas kapal. Hasil penelitian dari Iskandar (1997) juga menjelaskan bahwa tinggi rendah nilai KG tidak bergantung pada nilai ton displacement kapal tetapi pada kondisi penempatan muatan di atasnya.
Berdasarkan Tabel 4.2 juga diketahui bahwa nilai ton displacement berpengaruh terbalik terhadap nilai tinggi metacentre (GM) yang terbentuk, dimana semakin tinggi nilai ton displacement kapal maka tinggi metacentre akan
menurun. Hal ini dapat dijelaskan pada Gambar 4.6 bahwa, jika sebuah beban w (ton) meningkatkan draft kapal maka centre of gravity kapal akan meningkat sehingga terjadi sebuah posisi GG1 yang baru, sehingga tinggi metacentre akan menurun.
Gambar 4.6. Penambahan beban pada kapal
Kapal sampel K-A dengan bentuk round sharp bottom memiliki nilai KG yang lebih tinggi dibandingkan ketiga kapal sampel lainnya. Hal ini disebabkan karena bentuk seperti ini memungkinkan untuk mendistribusikan muatan yang lebih banyak pada bagian atas deck sehingga titik berat kapal bergerak ke atas.
Dengan demikian nilai KG yang terbentuk menjadi lebih tinggi.
Nilai KG tertinggi pada keseluruhan kapal sampel berada pada saat kondisi kapal beroperasi dan pulang, Tingginya nilai KG pada saat kondisi tersebut karena bertambahnya muatan di atas dek oleh hasil tangkapan sedangkan muatan di bawah dek seperti bahan bakar dan umpan hidup menjadi berkurang, sehingga titik G bergerak ke atas.
Perubahan nilai KG pada kapal akan mengakibatkan perubahan jarak tinggi metacentre (GM), dimana semakin tinggi nilai KG maka nilai tinggi metacentre akan semakin kecil. Nilai GM kapal selanjutnya akan berpengaruh terhadap periode oleng kapal pada saat beroperasi di perairan. Penjelasan mengenai hubungan antara nilai GM dan periode oleng kapal akan dipaparkan pada Bagian 5 tulisan ini.
Sumber: Hind (1982)
4.4.2 Nilai Lengan Penegak GZ Kapal
Ada dua gaya yang mengatur kestabilan kapal di laut, yaitu gaya berat (forces of gravity, G) yang selalu bergerak vertikal ke bawah dan gaya apung (forces of bouyancy, B) yang bergerak vertikal ke atas. Pada saat kapal dalam kondisi tenang, kedua gaya ini berada pada satu garis vertikal yang sama. Pada saat kapal mengalami keolengan, gaya berat dan gaya apung kapal akan bergerak ke arah yang berlawanan. Jarak perpendicular yang dibentuk oleh kedua garis gaya ini disebut lengan penegak (GZ). (Gillmer dan Johnson, 1982).
Perhitungan stabilitas statis kapal pole and line sampel dilakukan dengan analisis nilai GZ kapal pada beberapa sudut keolengan yang sesuai dengan aturan yang dikeluarkan oleh IMO. Nilai lengan GZ kapal pole and line sampel yang disajikan pada Tabel 4.3 – 4.6 memiliki nilai yang lebih besar dibandingkan nilai minimum yang ditetapkan oleh IMO. Hal ini dapat dilihat dari nilai margin yang positif (Tabel 4.7). Kondisi tersebut menunjukkan bahwa pada keempat kondisi pemuatan, kapal dapat menghasilkan momen kopel yang positif untuk mengembalikan kapal ke posisi semula setelah terjadi oleng akibat gaya yang bekerja padanya.
Nilai GZ akan menjadi negatif jika sudut keolengan lebih besar dari batas nilai maksimum kisaran stabilitas (Tabel 4.7), yang mengakibatkan kapal tidak lagi menghasilkan lengan GZ yang positif. Bila hal ini terjadi kapal akan terbalik karena saat terjadi keolengan pada sudut tersebut. Kapal dengan lengan GZ negatif akan meneruskan geraknya ke arah kemiringannya dan tidak kembali ke posisi semula.
Pada Gambar 4.7 disajikan grafik kriteria stabilitas kapal pole and line sampel berdasarkan nilai yang diperoleh pada Tabel 4.3 – 4.6. Dari gambar tersebut terlihat bahwa nilai kriteria stabilitas (A, B, C, D, E dan F) pada keempat bentuk kapal sampel masing-masing berturut-turut pada tiap kondisi pemuatan
semakin kecil, dimana kapal sampel K-A dengan bentuk round-sharp bottom memiliki nilai GZ yang lebih besar sehingga nilai kriteria stabilitasnya lebih baik dibandingkan kapal sampel yang lain.
K-A
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
0 1 2 3 4 5
Nilai Kriteria Stabilitas A
B C D E F
K-B
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
0 1 2 3 4 5
Nilai Kriteria Stabilitas
A B C D E F
K-C
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
0 1 2 3 4 5
Nilai Kriteria Stabilitas A
B C D E F
K-D
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
0 1 2 3 4 5
Nilai Kriteria Stabilitas A
B C D E F
Gambar 4.7 Kriteria stabilitas kapal pole and line sampel
Pada keempat kapal sampel pendistribusian muatan di ruang bawah dek kurang maksimal karena tidak terdapatnya palkah ikan, sehingga titik berat (G) cenderung bergerak ke atas saat muatan bertambah di dek pada kondisi kapal beroperasi dan pulang.
Selain bentuk badan kapal, tinggi rendah freeboard juga bepengaruh terhadap nilai kriteria stabilitas. Penurunan tinggi freeboard pada saat muatan pada kapal bertambah akan membuat nilai lengan penegak GZ menjadi rendah dan sebaliknya. Hal ini juga dikemukakan oleh Hind (1982) dan Derret (1990), bahwa selain lebar kapal dan tinggi titik G, nilai lengan penegak GZ juga dipengaruhi oleh tinggi rendah freeboard kapal dimana pertambahan tinggi freeboard akan meningkatkan nilai lengan penegak GZ yang terbentuk.
4.5 Kesimpulan
Dari analisis stabilitas statis empat kapal pole and line sampel diperoleh kesimpulan:
(1) Nilai ton displacement kapal akibat perubahan distribusi muatan dapat mempengaruhi perubahan nilai KG dan GM kapal, masing-masing berbanding lurus dengan nilai KG dan berbanding terbalik dengan nilai GM.
(2) Nilai kriteria stabilitas pada keempat kapal sampel masing-masing berturut- turut pada tiap kondisi pemuatan semakin kecil, akibat bertambahnya nilai KG.
(3) Kapal sampel K-A dengan bentuk round-sharp bottom memiliki nilai kriteria stabilitas yang lebih tinggi dibandingkan ketiga bentuk kapal lainnya.
(4) Lengan penegak GZ yang terbentuk pada keempat kapal pole and line sampel pada setiap kondisi pemuatan bernilai positif dan berada di atas nilai standar
minimum yang ditetapkan oleh IMO, yang berarti nilai lengan penegak GZ yang dihasilkan masih dapat mengembalikan kapal ke posisi semula setelah terjadi keolengan, sehingga dapat disimpulkan bahwa keempat kapal sampel tersebut memiliki stabilitas yang baik.
REFERENSI
Derret, D.R. 1990. Ship Stability for Masters and Mates. Fourth Edition, Revised. Butler & Tanner Ltd, Frome and London.
Fyson, J. 1985. Design of Small Fishing Vessels. Fishing News (Books) Ltd.
England.
Gillmer, T.C and B.Johnson. 1982. Introduction to Naval Architecture. Naval Institute Press. Annapolis. Maryland.
Hind, J.A. 1982. Stability and Trim of Fishing Vessels and Other Small Ships. Second Edition. Fishing News Books Ltd. Farnham, Surrey, England.
International Maritime Organization (IMO). 1983. International Confrence on Safety Fishing Vessels 1977. IMO. London.
Iskandar, B.H., 1997. Studi tentang Desain Kapal Kayu Mina Jaya BPPT 01.
Tesis pada Program Pascasarjana IPB. Bogor.
Kok, H.G.M, Lonkhyusen, E.G.V and Nierich, F.A.C. 1983. Bangunan Kapal.
Zundort. Netherland.
Taylor, L.G. 1977. The Principles of Ship Stability. Brown, Son & Publisher, Ltd., Nautical Publisher, 52 Darnley Street. Glasgow.
Lampiran 4.1. Perkiraan Distribusi Berat Kapal Pole and Line Sulawesi Selatan
Kapal K-A
1. Kondisi Kapal Kosong
No Item Berat (ton) Posisi X (cm) Moment Posisi Z (cm) Moment 1 Kapal kosong 66.000 0.000 0.000 190.000 12540.000
Total 66.000 12540.000
2. Kondisi Kapal Berangkat
No. Item Berat (ton) Posisi X (cm) Moment Posisi Z (cm) Moment 1 Kapal kosong 66.000 0.000 0.000 190.000 12540.000 2 BBM 0.320 -878.500 -281.120 220.680 70.618 3 Air tawar 1.000 -1104.400 -1104.400 500.600 500.600 4 Alat tangkap 0.063 642.560 40.481 100.280 6.318 5 Umpan (1) 9.500 281.120 2670.640 180.400 1713.800 6 Umpan (2) 9.500 -190.760 -1812.220 180.400 1713.800 7 Bahan Makanan 0.050 -1204.800 -60.240 411.600 20.580 8 Perlengkapan 0.125 873.480 109.185 120.360 15.045 9 ABK 0.563 -582.320 -327.555 551.800 310.388
10 ABK 0.563 750.240 422.010 501.800 282.263
Total 87.683 17173.410
3. Kondisi Kapal Beroperasi
No Item Berat (ton) Posisi X (cm) Moment Posisi Z (cm) Moment 1 Kapal kosong 66.000 0.000 0.000 190.000 12540.000 2 BBM 0.250 -878.500 -219.625 220.680 55.170 3 Air tawar 0.500 -1104.400 -552.200 500.600 250.300 4 Alat tangkap (1) 0.027 642.560 17.349 100.280 2.708 5 Alat tangkap (2) 0.013 1234.920 15.437 501.800 6.273 6 Alat tangkap (3) 0.005 883.520 4.418 481.680 2.408 7 Alat tangkap (4) 0.005 883.520 4.418 481.680 2.408 8 Umpan (1) 9.200 281.120 2586.304 180.400 1659.680 9 Umpan (2) 9.200 -190.760 -1754.992 180.400 1659.680 10 Ikan (1a) 0.300 -140.560 -42.168 450.201 135.060 11 Ikan (2a) 0.200 220.880 44.176 381.120 76.224 12 Ikan (1b) 0.300 -140.560 -42.168 450.201 135.060 13 Ikan (2b) 0.200 220.880 44.176 381.120 76.224 14 Bahan makanan 0.020 1204.800 24.096 411.600 8.232 15 Perlengkapan 0.125 873.480 109.185 130.360 16.295 16 ABK (1) 0.376 1234.920 464.330 501.800 188.677 17 ABK (2) 0.150 883.520 132.528 481.680 72.252 18 ABK (3) 0.150 883.520 132.528 481.680 72.252 19 ABK (4) 0.450 -582.320 -262.044 551.800 248.310
Total 87.471 17207.213
4. Kondisi Kapal Pulang
No Item Berat (ton) Posisi X (cm) Moment Posisi Z (cm) Moment z 1 Kapal kosong 66.000 0.000 0.000 190.000 12540.000 2 BBM 0.100 -878.500 -87.850 220.680 22.068 3 Air tawar 0.300 -1104.400 -331.320 500.600 150.180 4 Alat tangkap 0.063 642.560 40.481 100.280 6.318 5 Umpan (1) 9.150 281.120 2572.248 180.400 1650.660 6 Umpan (2) 9.150 -190.760 -1745.454 180.400 1650.660 7 Ikan (1a) 0.350 -140.560 -49.196 450.201 157.570 8 Ikan (2a) 0.270 220.880 59.638 381.120 102.902 9 Ikan (1b) 0.350 -140.560 28.112 450.201 157.570 10 Ikan (2b) 0.270 220.880 66.264 381.120 96.384 11 Bahan makanan 0.010 -1204.800 6.024 411.600 2.008 12 Perlengkapan 0.125 873.480 43.674 130.360 4.518 13 ABK 0.563 -582.320 436.740 551.800 338.850 14 ABK 0.563 -582.320 -327.555 501.800 282.263
Total 87.264 17161.951
Kapal K-B
1. Kondisi Kapal Kosong
No Item Berat (ton) Posisi X (cm) Moment Posisi Z (cm) Moment 1 Kapal kosong 78.226 0.000 0.000 187.000 14628.299
Total 78.226 14628.299
2. Kondisi Kapal Berangkat
No. Item Berat (ton) Posisi X (cm) Moment Posisi Z (cm) Moment 1 Kapal kosong 78.226 0.000 0.000 187.000 14628.262 2 BBM 0.500 -879.120 -439.560 200.360 100.180 3 Air tawar 2.000 -1030.080 -2060.160 450.200 900.400 4 Alat tangkap 0.050 301.920 15.096 159.480 7.974 5 Umpan (1) 9.800 -275.280 -2697.744 170.000 1666.000 6 Umpan (2) 9.800 -8.880 -87.024 170.000 1666.000 7 Bahan Makanan 0.070 -1136.640 -79.565 400.320 28.022 8 Perlengkapan 0.150 568.320 85.248 100.800 15.120 9 ABK 0.700 -581.640 -407.148 500.200 350.140
10 ABK 0.700 354.400 248.080 328.560 229.992
Total 101.996 19592.090
3. Kondisi Kapal Beroperasi
No Item Berat (ton) Posisi x (cm) Moment x Posisi Z (cm) Moment 1 Kapal kosong 78.226 0.000 0.000 187.000 14628.262 2 BBM 0.300 -879.120 -263.736 200.360 60.108 3 Air tawar 1.500 -1030.080 -1545.120 450.200 675.300 4 Alat tangkap (1) 0.022 301.920 6.642 133.200 2.930 5 Alat tangkap (2) 0.013 284.160 3.552 444.000 5.550 6 Alat tangkap (3) 0.010 226.440 2.264 372.960 3.730 7 Alat tangkap (4) 0.005 226.440 1.132 372.960 1.865 8 Umpan (1) 8.000 -275.280 -2202.240 170.000 1360.000 9 Umpan (2) 8.000 -8.880 -71.040 170.000 1360.000 10 Ikan (1a) 0.350 0.000 0.000 346.320 121.212 11 Ikan (2a) 0.400 84.360 33.744 346.320 138.528 12 Ikan (1b) 0.450 0.000 0.000 355.200 159.840 13 Ikan (2b) 0.350 84.360 29.526 355.320 124.362 14 Bahan makanan 0.050 -1136.640 -56.832 400.320 20.016 15 Perlengkapan 0.150 568.320 85.248 100.800 15.120 16 ABK (1) 0.500 284.160 142.080 444.000 222.000 17 ABK (2) 0.250 226.440 56.610 372.960 93.240 18 ABK (3) 0.250 226.440 56.610 372.960 93.240 19 ABK (4) 0.400 -581.640 -232.656 355.200 142.080
Total 99.226 19227.383
4.Kondisi Kapal Pulang
No Item Berat (ton) Posisi X (cm) Moment Posisi Z (cm) Moment 1 Kapal kosong 78.226 0.000 0.000 187.000 14628.262
2 BBM 0.100 879.120 87.912 200.360 20.036
3 Air tawar 0.500 1030.080 515.040 450.200 225.100 4 Alat tangkap 0.050 301.920 15.096 133.200 6.660 5 Umpan (1) 7.000 275.280 1926.960 170.000 1190.000 6 umpan (2) 7.000 8.880 62.160 170.000 1190.000 7 Ikan (1a) 0.500 0.000 0.000 346.320 173.160 8 Ikan (2a) 0.500 84.360 42.180 346.320 173.160 9 Ikan (1b) 0.500 0.000 0.000 355.200 177.600 10 Ikan (2b) 0.500 84.360 42.180 355.200 177.600 11 Bahan makanan 0.010 1136.640 11.366 346.320 3.463 12 Perlengkapan 0.150 568.320 85.248 120.880 18.132 13 ABK 0.700 581.640 407.148 500.200 350.140 14 ABK 0.700 354.400 248.080 328.560 229.992
Total 96.436 18563.305
Kapal K-C
1. Kondisi Kapal Kosong
No Item Berat (ton) Posisi X (cm) Moment Posisi Z (cm) Moment 1 Kapal kosong 44.000 0.000 0.000 145.000 6380.000
Total 44.000 6380.000
2. Kondisi Kapal Berangkat
No. Item Berat (ton) Posisi X (cm) Moment Posisi Z (cm) Moment 1 Kapal kosong 44.000 0.000 0.000 145.000 6380.000 2 BBM 0.500 -456.840 -228.420 134.160 67.080 3 Air tawar 1.000 -736.020 -736.020 287.640 287.640 4 Alat tangkap 0.050 2174.220 108.711 147.800 7.390 5 Umpan (1) 6.500 50.760 329.940 135.000 877.500 6 Umpan (2) 6.500 274.950 1787.175 135.000 877.500 7 Bahan Makanan 0.020 -884.070 -17.681 369.800 7.396 8 Perlengkapan 0.100 664.110 66.411 172.000 154.800 9 ABK 0.500 -456.840 -228.420 412.800 206.400
10 ABK 0.500 430.000 215.000 264.000 132.000
TOTAL 59.670 8997.706
3. Kondisi Kapal Beroperasi
No Item Berat (ton) Posisi X (cm) Moment Posisi Z (cm) Moment 1 Kapal kosong 43.900 0.000 0.000 145.000 6365.500 2 Mesin 0.100 -266.500 -26.650 121.578 12.158 3 BBM 0.150 -456.840 -68.526 134.160 20.124 4 Air tawar 0.500 -736.020 -368.010 287.640 143.820 5 Alat tangkap (1) 0.013 2174.220 27.178 430.000 5.375 6 Alat tangkap (2) 0.005 1049.400 5.247 352.600 1.763 7 Alat tangkap (3) 0.005 888.300 4.442 352.600 1.763 8 Alat tangkap (4) 0.028 888.300 24.428 147.800 4.065 9 Umpan (1) 6.350 50.760 322.326 121.800 773.430 10 Umpan (2) 6.350 274.950 1745.933 121.800 773.430 11 Ikan (1a) 0.100 -118.440 -11.844 301.000 30.100 12 Ikan (2a) 0.100 186.120 18.612 240.800 24.080 13 Ikan (1b) 0.100 118.440 11.844 301.000 30.100 14 Ikan (2b) 0.100 186.120 18.612 240.800 24.080 15 Bahan makanan 0.010 -884.070 -8.841 369.800 3.698 16 Perlengkapan 0.100 664.110 66.411 172.000 17.200 17 ABK (1) 0.325 -456.840 -148.473 430.000 139.750 18 ABK (2) 0.130 1049.400 136.422 352.600 45.838 19 ABK (3) 0.130 888.300 115.479 352.600 45.838 20 ABK (4) 0.390 883.300 344.487 412.800 160.992
Total 58.885 8623.103
4.Kondisi Kapal Pulang
No Item Berat (ton) Posisi X (cm) Moment Posisi Z (cm) Moment 1 Kapal kosong 43.900 0.000 0.000 145.000 6365.500 2 Mesin 0.750 -266.500 -199.875 121.578 91.184 3 BBM 0.080 -456.840 -36.547 134.160 10.733 4 Air tawar 0.500 -736.020 -368.010 287.640 143.820 5 Alat tangkap 0.050 2174.220 108.711 147.800 7.390 6 Umpan (1) 6.300 50.760 319.788 121.800 767.340 7 Umpan (2) 6.300 274.950 1732.185 121.800 767.340 8 Ikan (1a) 0.150 -118.440 -17.766 301.000 45.150 9 Ikan (2a) 0.150 186.120 27.918 240.800 36.120 10 Ikan (1b) 0.150 -118.440 -17.766 301.000 45.150 11 Ikan (2b) 0.150 186.120 27.918 240.800 36.120 12 Bahan makanan 0.002 -884.070 -1.768 369.800 0.740 13 Perlengkapan 0.100 664.110 66.411 172.000 154.800 14 ABK 0.488 -456.840 -222.938 412.800 201.446
15 ABK 0.488 430.000 209.840 264.000 128.832
TOTAL 59.558 3381.978 8801.664