BAB III
D ESAIN D AN P ENGENDALIAN S ISTEM L AMPU L ALULINTAS
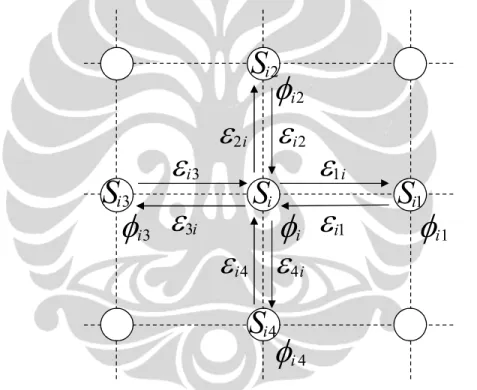
Lampu lalu lintas dimodelkan dengan bi-directed graph seperti pada gambar berikut:
S
i2S
iS
i1S
i3S
i4φ
iφ
i1φ
i2φ
i3φ
i 4ε
i1ε
i2ε
i3ε
i4ε
1iε
2iε
3iε
4iGambar 2. Model Signal Network
PersimpanganS mempengaruhi dan dipengaruhi oleh persimpangan tetangganya, i yaitu persimpangan S , i1 S , i2 S , dani3 S . Setiap persimpangan dilambangkan i4 dengan node Si(1≤i≤N), dan tetangga dari sinyal S adalah i S yang memiliki index ij sinyalnya sendiri yaitu S . j
φ
i menyatakan fase dari satu putaran sinyal S , dan iφ
ij( j ∈ {1,2,..., n
i})
merupakan fase untuk sinyal S , di mana ij n adalah banyaknya sinyal yang i dipasangkan dengan S . Dalam hal ini bisa dikatakan bahwa i S merupakan sebuah i perempatan karena mempunyai 4 buah sinyal tetangga.
ε
ij adalah aliran kendaraan yang telah dinormalisasi, yang didefinisikan sebagai:dt Ti
ijt
Ti t im t
ij
1 ( )
= ρ
ε ρ ∫
+ (3.1)dimana
ρ
im adalah konstanta yang merupakan kapasitas dari jalan danρ
ij(t )
merupakan kepadatan dari jalan antara sinyal S dan i S pada interval waktu ij
] ,
[ t + t T
i .III.1 D
ESKRIPSIS
INYALN
ETWORKD
ENGANM
ENGGUNAKANN
ONLINIERC
OUPLEDO
SCILLATORPada bagian ini, penulis menjabarkan traffic signal network dengan menggunakan sebuah sistem nonlinear oscillators dengan coupling terdekat. Secara spesifik, penulis menerapkan deskripsi model fase dari coupled oscillator yang diperkenalkan oleh Kuramoto, yaitu sebuah model yang digeneralisasi dan dinyatakan dengan:
) , (
= ) (
1
=
ij i i ni
i j i
i
n
t ω K φ φ
φ & + ∑ Γ
(3.2)dimana:
) , (
= ) 2 ,
(
= ) , 2
(
i ij i i ij i i iji
φ + π φ Γ φ φ + π Γ φ φ
Γ
(3.3)Persamaan diatas berlaku untuk semua i dan j.
Re Im
Unit circle φi1
φi2 φi3
φi4 φi
εi1 εi 2 εi 3 εi 4
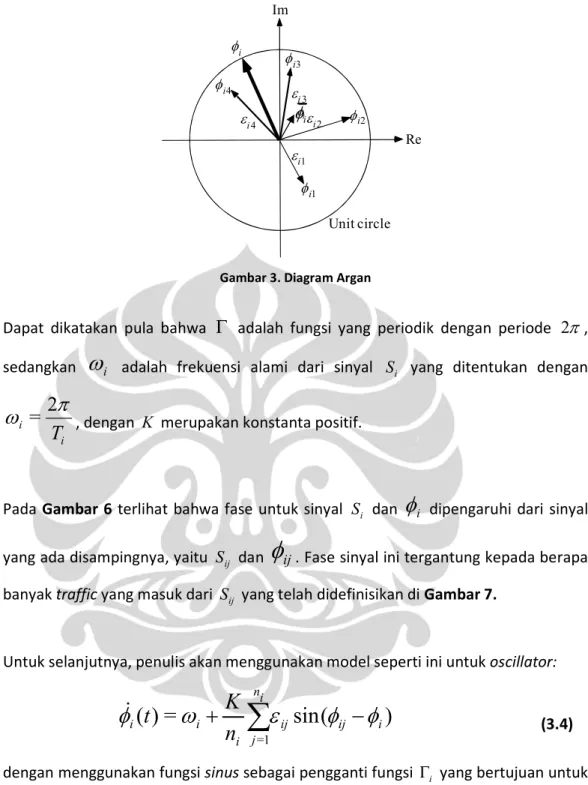
Gambar 3. Diagram Argan
Dapat dikatakan pula bahwa
Γ
adalah fungsi yang periodik dengan periode 2π, sedangkanω
i adalah frekuensi alami dari sinyal S yang ditentukan dengan ii
i
T
ω = 2 π
, dengan K merupakan konstanta positif.Pada Gambar 6 terlihat bahwa fase untuk sinyal S dan i
φ
i dipengaruhi dari sinyal yang ada disampingnya, yaitu S dan ijφ
ij. Fase sinyal ini tergantung kepada berapa banyak traffic yang masuk dari S yang telah didefinisikan di Gambar 7. ijUntuk selanjutnya, penulis akan menggunakan model seperti ini untuk oscillator:
) (
sin
= ) (
1
=
i ij ij
ni
i j i
i
n
t ω K ε φ φ
φ & + ∑ −
(3.4)dengan menggunakan fungsi sinus sebagai pengganti fungsi Γ yang bertujuan untuk i menyederhanakan persamaan.
Dengan mengatur ulang persamaan (3.4) menggunakan formula euler, penulis mendapatkan persamaan:
φi
i e e
n t K
i i ij i
i ij ij ni
i j i
i
( ) = 2
) ( ) (
1
=
φ φ φ
φ
ε ω
φ
−
−
−
−
+ ∑
&
−
+
−∑ ∑
−i iji ij j
ni i i i ij
i ij j
ni i i
i
e
e n n e
i e
K
φε
φ φε
φω
=1 =1= 2
(3.5)Definisikan Ai dan Bi sebagai berikut:
i ij
i i ij n
j
i
e
A ε n
φ∑
=1=
(3.6)i ij
i i ij n
j
i
e
B ε n
−φ∑
=1=
(3.7)Maka persamaan (3.5) dapat dinyatakan dengan:
(
i)
i i i i i i
i
e A e B
i
t ω K
φ φφ +
−−
= 2 )
& (
(3.8)Dengan menggunakan formula euler maka bisa didapatkan persamaan seperti berikut:
(
i i i i i i)
i
i
i A i B
i
t K ( cos sin ) ( cos sin )
= 2 )
( ω φ φ φ φ
φ & + − − +
(3.9)Lalu persamaan tersebut disusun ulang sehingga menjadi:
( ( cos ( ) sin ( ) )
= 2 )
(
i i i i i i ii
A B i A B
i
t ω + K φ − − φ +
φ &
(3.10)Selanjutnya, penulis akan mendefinisikan ai dan bi melalui persamaan berikut:
ij i
i i ij n
j i
i
i ib
B n
A = 2 sin = 2
1
=
ε φ
∑
−
(3.11)i ij i i ij n
j i
i a
B n
A =2 cos =2
1
=
ε φ
∑
+ (3.12)
Sehingga didapatkan persamaan ai dan bi, yaitu:
ij i i ij n
j
i
n
a ε φ
cos
=
1
∑
= (3.13)ij i i ij n
j
i
n
b ε φ
sin
=
1
=
∑
(3.14)Setelah persamaan ai dan bi didapatkan, persamaan (3.10) dapat disusun ulang sehingga menjadi:
(
i i i i)
i
i
ib ia
i
t ω K φ φ
φ 2 cos 2 sin
= 2 )
( + −
&
(3.15)(
i i i i)
i
i
t ω K b φ a φ
φ & ( ) = + cos − sin
(3.16)Selanjutnya, persamaan (3.16) akan disampaikan sebagai model entrainment, yaitu seperti berikut:
) (
sin
= )
(
i i i ii
t ω σ K φ φ
φ & + −
(3.17)Dengan menyamakan persamaan (3.16) dan persamaan (3.17), maka diperoleh hubungan seperti berikut:
i i i i i i
i
φ φ b φ a φ
σ sin ( − ) = cos − sin
(3.18)Setelah itu kita jabarkan ruas kiri:
) (
sin
i ii
φ φ
σ −
(3.19)) cos sin cos
sin
(
i i i ii
φ φ φ φ
σ −
(3.20)i i i i i
i
φ φ σ φ φ
σ sin cos − sin cos
(3.21)i i i i i i i i i
i
φ φ σ φ φ b φ a φ
σ sin cos − sin cos = cos − sin
(3.23)Dengan menyamakan koefisien
cos
dansin
maka didapatkan:i i
i
sin φ = b
σ
(3.24)i i
i
cos φ = a
σ
(3.25)Sehingga hubungan antara σi, ai dan bi adalah:
2
= i2 i
i a +b
σ
(3.26)
i i
i a
arctan b
φ
= (3.27)Dalam Diagram Argan, nilai a dan i b berturut-turut adalah bagian real dan imaginer i dari bilangan kompleks seperti berikut:
i i i i
i
i
b i
a ± = σ cos φ ± σ sin φ
(3.28)i i
i
e
φσ
±=
(3.29)Dengan memanfaatkan persamaan (3.13) dan persamaan (3.14) diperoleh hubungan sebagai berikut:
[
ij ij]
ni
j i i i i
i
e a ib φ i φ
σ
φ= = cos sin
1
=
+
± ∑
±
(3.30)
ij
i i n
j i i i i
i
e
φa ib e
φσ
±± ∑
1
=
=
=
(3.31)III.2 S
PLITS
ETTINGBagian ini akan mengatur split setting dari lampu lalu lintas. Pertama-tama definisikan waktu putaran dari sinyal S sebagai berikut: i
cl i
i i i i
i
T T T
T ( τ ) =
1( τ ) +
2( τ ) + 2
(3.32)Termasuk dalam persamaan diatas, Tcl merupakan konstanta clearence, dimana )
1( i
Ti τ dan Ti2(
τ
i) secara berurutan adalah split time dari sinyal S pada arah i vertikal dan horizontal.Clearence time dimasukkan untuk menyesuaikan pemodelan dengan sistem lampu lalu lintas yang mengenal adanya jeda antara lampu merah dengan lampu hijau. Jeda tersebut adalah lampu kuning yang berguna untuk keamanan saat transisi antara lampu merah ke lampu hijau dan juga sebaliknya. Pada daerah yang tidak menggunakan sistem clearence ini maka nilai
T
cl= 0
.Split time
T
ik, diupdate pada setiap permulaan putaran dan proposional dengan jumlah dari arus kendaraan yang masuk, baik dari arah horizontal maupun vertikal.Untuk melihat total flow yang masuk ke persimpangan, digunakan rumus berikut:
,4 ,2
2 ,3 ,1
1
=
i i,
i=
i ii
r
r ε + ε ε + ε
(3.33)1
r merupakan total flow untuk arah horizontal atau main direction pada jalan, i
sedangkan r merupakan total flow untuk arah vertikal atau secondary directionnya. i2
Dari persamaan diatas, penulis dapat mencari desired split time untuk arus kendaraan yang masuk dari arah horizontal dan vertikal dengan persamaan di bawah ini:
1,2)
= ( ), 2 ) ( ) ( ( ) (
)
= (
2 1
*
T T k
r r
T r
i i cli i i i
i ik
ik
−
+ τ
τ τ
τ
(3.34)
Setelah itu, updating function dapat didefinisikan dengan persamaan berikut:
1,2)
= ( )), ( (
) (
= 1)
( T T
*T k
T
ikτ
i+
ikτ
i+ γ
ik−
ikτ
i (3.35)Di mana
γ
merupakan konstanta perubahan. Yang akan menentukan seberapa cepat perubahan dari split time menuju desired split time.Perubahan tidak dilakukan sekaligus karena nilai flow kendaraan yang ada pada perhitungan diambil dari nilai flow kendaraan pada waktu sebelumnya. Hal ini mengakibatkan nilai flow kendaraan tidak akan sama untuk waktu berikutnya.
III.3 S
ELF-O
RGANIZINGD
ARIP
ENYESUAIANO
FFSETBagian ini akan membahas strategi untuk menyesuaikan pola offset dari lampu lalu lintas dengan menggunakan mutual entrainment4.
Misalkan
ψ
i menyatakan fase relatif antaraφ
i danφ
i yang didefinisikan sebagai:i i
i
φ φ
ψ = −
(3.36)Maka dinamik dari fase relatifnya dapat diekspresikan dengan:
) ( sin
=
i i i ii
ω σ K ψ
ψ & Ω − −
(3.37)
4 Mutual Entrainment merupakan keadaan dimana terdapat 2 objek yang bergerak masing-masing namun memiliki suatu media untuk bertukar informasi sehingga pergerakan keduanya menjadi tersinkronisasi
dimana Ω adalah frekuensi alami dari fase rata-rata i
φ
i.Dengan memeriksa fixed point dari dinamik tersebut dengan memperhitungkan sifat dari fungsi sinus yang bernilai diantara -1 dan 1, maka fixed point pada persamaan (3.37) hanya terjadi jika:
≤ 1
− Ω
i
K
i i
σ ω
(3.38)
Oleh sebab itu pada persamaan (3.38), phase locking akan terjadi pada perbedaan fase seperti berikut:
Ω −
iK
i i
i
σ
ψ
= arcsinω
(3.39)Saat oscillator S di phase lock dengan oscillator disampingnya. i
Pada persamaan (3.40),
∆ φ
ij adalah selisih fase terhadapφ
i yang didefinisikan sebagai:i ij
ij
φ φ
φ −
∆ =
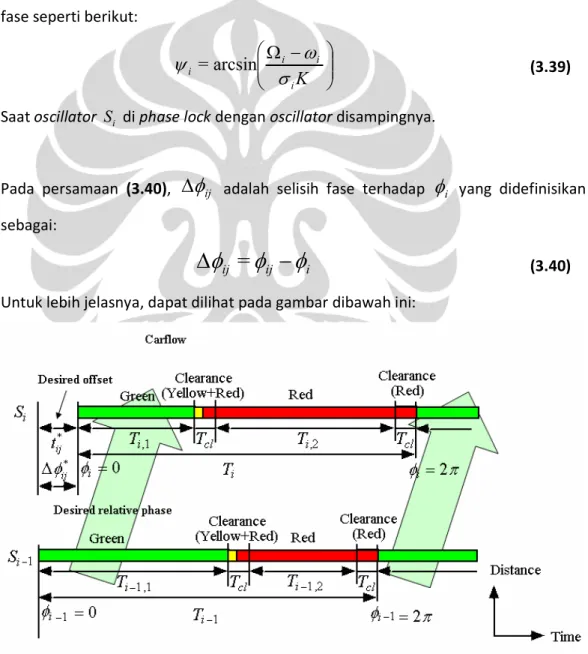
(3.40)Untuk lebih jelasnya, dapat dilihat pada gambar dibawah ini:
Gambar 4. Flow Kendaraan Pada Primary Direction
Gambar tersebut memaparkan mengenai pengaturan offset pada lampu lalu lintas yang disesuaikan dengan tetangganya pada primary direction.
Kemiringan dari panah menyatakan kecepatan kendaraan. Gambar tersebut menjelaskan tentang pengaturan perbedaan fase lampu lalu lintas di sekitar sehingga jika kendaraan telah sampai pada persimpangan berikutnya maka lampu lalu lintas pada persimpangan tersebut akan berwarna hijau..
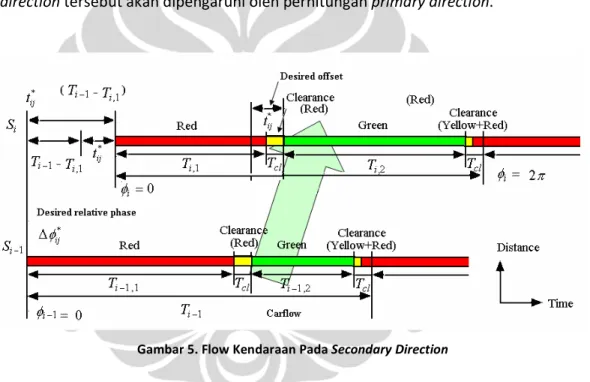
Setelah penjelasan mengenai primary direction, maka selanjutnya akan didefinisikan pengaturan pada secondary direction. Tentunya perhitungan untuk yang secondary direction tersebut akan dipengaruhi oleh perhitungan primary direction.
Gambar 5. Flow Kendaraan Pada Secondary Direction
Pada masalah ini, penulis ingin mencapai pengaturan offset yang sesuai dari persimpangan yang berurutan sepanjang jalan pada arah dari lalu lintas yang padat.
Hal ini dimaksudkan untuk mengurangi jeda pada saat lampu merah, seperti pada gambar diatas.
Penulis mengusulkan sistem yang dapat melakukan pengorganisasian secara otomatis untuk mencapai pola network offset yang diinginkan dengan menggunakan perbedaan fase melalui mutual entrainment.
Misalkan
t
ij* merupakan waktu yang dibutuhkan untuk sebuah kendaraan mencapai persimpangan S dari i S , maka offset yang diinginkan antara sinyal ij S dan ij S i ditentukan oleh:) 2 ( 2
=
*
*
π π
φ
modT t
i ij
∆ ij (3.41)
dimana T adalah waktu putaran dari sinyal i S . i
Waktu yang diharapkan, yaitu
t
ij* adalah:max ij
ij
ij
v
t =
*l
(3.42)dimana
l
ij merupakan jarak antar sinyal yang bersebelahan danv
ijmax adalah batas kecepatan dari jalan antara interval (Sij,Si).Setelah mendapatkan nilai desired offset untuk arah yang primary, nilai desired offset untuk arah yang secondary juga dapat ditemukan dengan cara:
) 2 ) (
2 (
=
1,1 ,1*
*
π π
φ mod
T T T
t
i i i
ij ij
−
∆ +
− (3.43)Persamaan diatas mengacu pada Gambar 9.
Frekuensi alami yang diinginkan dari oscillator S adalah: i
*
*
*
=
i~
isin
ii
σ K φ
ω Ω − ∆
(3.44)Persamaan diatas mengacu pada persamaan (3.37) dimana
ψ
&i =0.Untuk mencapai fase relatif yang diinginkan, digunakan persamaan seperti ini:
∆
∆
∆
∑
∑
* 1
=
* 1
* =
cos sin arctan
=
ij ij
ni
j
ij ij
ni
j i
φ ε
φ ε
φ
(3.45)dengan berdasarkan pada fase rata-rata yang telah diberi bobot yaitu
φ
i melalui mutual entrainment.III.4 A
TURANP
ERUBAHANF
REKUENSIA
LAMIAHBerikut ini adalah persamaan untuk mengatur perubahan dari frekuensi alamiah:
))
~ ( ( )) ( (
) (
= 1)
(
i i i i* i i i* i ii
τ ω τ α ω ω τ β ω ω τ
ω + + − + −
(3.46)Dimana
τ
i adalah dimensionless-time, yaitu waktu yang telah diberi skala yang berhubungan dengan periode dari sinyal dan α,β∈(0,1) merupakan konstanta bernilai positif. Pada aturan perubahan ini, sebuah frekuensi dasar ~*ω digunakan i
untuk setiap sinyal yang berguna untuk mencegah pergeseran dari frekuensi natural di setiap sinyal.
III.5 P
ERKIRAANF
REKUENSIA
LAMIAHD
ARIB
OBOTF
ASER
ATA-R
ATABagian ini akan membahas frekuensi alamiah dan bobot fase rata-rata yang diperkenalkan pada bagian 4.3. Untuk selanjutnya penulis akan menganggap perkiraan dari hasil kompromisasi frekuensi dengan mengasumsikan terjadinya mutual entrainment secara lokal diantara oscillator S dani S . ij
Dinamika dari oscillator S pada oscillator lain yang berada disekitar ij S dapat i dinyatakan dengan:
ij ij i ji i ij
ij
f
n
t ) = + K sin ( − ) +
( ω ε φ φ
φ &
(3.47)Dimana
f
ij adalah pengaruh gabungan dari oscillator disekitar S terhadap ij S ij selain S . Dengan menggunakan persamaan (3.47) diatas dan dengan i mengasumsikan bahwa arus kendaraan pada oscillator disekitar S bersifat i homogen, maka persamaannya akan menjadi:ji ij
i ji ij
ij
= ω + K ε sin ( φ − φ ) + ∆ f
φ &
(3.48)Dengan mendefinisikan ∆ yaitu: fij
)) (
sin 1 (
=
ji i iji i ij
ij
K
n f n
f − ε φ − φ
−
∆
(3.49)dan dengan menganggap nilai dari 3 oscillator lain yang berada disekitarnya mempunyai nilai sama dengan S maka i ∆ dapat diabaikan sehingga persamaan fij (3.48) dapat dinyatakan seperti berikut:
) (
sin
=
ij ji i ijij
ω K ε φ φ
φ & + −
(3.50)Jika
ω
i adalah frekuensi kompromi dari oscillator ini pada keadaan stabil dan saat fasenya terkunci. Setelah itu, dengan asumsi terjadi local entrainment pada oscillator, maka kita mendapatkan persamaan sebagai berikut:i ij
i
φ ω
φ & = & =
(3.51) Dari persamaan (3.4) dan (3.47) bisa didapatkan nilai dari
ω
i yaitu:
+ +∆
+
=
∑
∑
==
i
i
n
j
ij ij ji ij i n ij
j ji
ij i
i f
n n
1 1
) 1 (
1 1
1
ω
ε ω ε
ε ω ε
(3.52) Jika nilai dari
∆ f
ij dapat diabaikan, maka persamaan tersebut menjadi:
+
+
≅ ∑
∑
==
i
i
n
j
ij ji ij
i n ij
j ji
ij
i
i
n
n
1 1
) 1 (
1 1
1 ω
ε ω ε
ε ω ε
(3.53) Setelah itu, dengan melihat persamaan (3.26) maka bisa didapatkan persamaan berikut ini:
ij ij
i ni
j
i
φ
δφ φ φ & ∑ δ &
1
=
=
(3.54)
( )
( )
∑ ∑
∑ ∑
= ≠
= ≠
− +
− +
i i
n
j ij ij k j ik ij ik
n
j ij ij k j ik ij ik ij
i
1 2 1
2
) cos(
)
= cos(
φ φ ε
ε ε
φ φ φ ε
ε
φ & ε &
(3.55)
Jika dilakukan phase lock padaS dan i S , maka akan didapatkan: ij
( )
( )
in
j ij ij k j ik ij ik
n
j ij ij k j ik ij ik
i i
i
φ ω φ ε
ε ε
φ φ ε
ε φ ε
∑ ∑
∑ ∑
= ≠
= ≠
− +
− +
1 2 1
2
) cos(
) cos(
& =
(3.56)
Karena nilai dari persamaan berikut:
( )
( cos( cos( ) ) ) 1
1 2 1
2
− = +
− +
∑ ∑
∑ ∑
= ≠
= ≠
i i
n
j ij ij k j ik ij ik
n
j ij ij k j ik ij ik
φ φ ε
ε ε
φ φ ε
ε ε
(3.57)
Maka,
i
i
ω
φ & =
(3.58) Pada keadaan yang sudah stabil, natural frekuensi dapat didekati dengan persamaan berikut:
i
i
= ω
Ωˆ
(3.59))