Fakultas Ilmu Komputer
859
Penggunaan Ciri Geometric Invariant Moment pada Pengenalan Tanda
Tangan
Rahma Juwita Sany1, Agus Wahyu Widodo2, Candra Dewi3
Program Studi Teknik Informatika, Fakultas Ilmu Komputer, Universitas Brawijaya Email: 1rahmasany@gmail.com, 2a_wahyu_w@ub.ac.id, 3dewi_candra@ub.ac.id
Abstrak
Tanda tangan sebagai atribut personal merupakan salah satu wujud alat verifikasi identitas seseorang yang secara luas telah diterima oleh masyarakat. Proses pengenalan tanda tangan dimulai dari
-preprocessing, yang terdiri dari proses filtering, binerisasi, thinning, cropping dan resize. Setelah melakukan preprocessing dilanjutkan proses ekstraksi ciri menggunakan Geometric Invariant Moment
untuk mendapatkan nilai fitur yang akan digunakan untuk proses klasifikasi menggunakan K-Nearest Neighbour. Variasi ciri Geometric Invariant Moment yang mempunyai nilai FAR dan FRR terkecil tiap sumber data berbeda. Untuk data dari Indonesia nilai FAR paling kecil didapatkan saat menggunakan
moment 7 dengan nilai FAR=7% dan nilai FRR paling kecil didapatkan saat menggabungkan moment
1,2,3,6 dan 7 dan saat menggunakan semua moment dengan masing-masing mempunyai nilai
FRR=61.5%. Untuk data dari Spanyol nilai FAR paling kecil didapatkan saat menggabungkan moment
3,4,5, dan 7, saat menggabungkan moment 1,3,4,5 dan 7 dan saat menggabungkan moment 1,3,4,5,6 dan 7 dengan masing-masing mendapatkan nilai FAR=7% dan nilai FRR paling kecil didapatkan dengan menggabungkan moment 2,3,4,5,6 dan 7 dan saat menggunakan semua moment dengan masing-masing mempunyai nilai FRR=72%. Untuk data dari Persia nilai FAR paling kecil didapatkan saat yaitu menggabungkan moment 3 dan 5 dan saat menggabungkan moment 3,5 dan 6 dengan masing-masing mempunyai nilai FAR=9.5% dan Persia nilai FRR paling kecil didapatkan saat menggabungkan moment
1,2,3,4,6 dan 7 dengan nilai FRR=37%. Ciri Geometric Invariant Moment yang diterapkan global pada suatu citra tidak memberikan akurasi yang tinggi. Mungkin karena ketika menerapkan ciri global, ciri lokal tidak terkenali dengan baik. Hal tersebut berlaku pada citra tanda tangan asli, sedangkan pada citra tanda tangan palsu penerapan ciri Geometric Invariant Moment secara global memberikan akurasi yang tinggi.
Kata Kunci: pengenalan tanda tangan, Geometric Invariant Moment, K-Nearest Neighbour
Abstract
apply global feature, the local features can’t recognize properly. It occurs on the original signature image, while the application of the features of Geometric Invariant globally on the fake signature image provide high accuracy.
Keywords: signature recognition, Geometric Invariant Moment, K-Nearest Neighbour
1. PENDAHULUAN
Setiap orang memiliki bentuk atau pola tanda tangan yang berbeda-beda sehingga tanda tangan merupakan salah satu ciri dari setiap orang. Tanda tangan sebagai atribut personal merupakan salah satu wujud alat verifikasi identitas seseorang yang secara luas telah diterima oleh masyarakat. Hingga kini, tanda tangan terus digunakan sebagai alat pengotorisasi berbagai keperluan legalitas untuk hampir semua dokumen seperti paspor perjalanan, sertifikat akademik, cek bank, dan lain sebagainya. Oleh karena sangat pentingnya fungsi tanda tangan, tanda tangan telah dinyatakan berperan penting dalam fungsi memberikan ciri atau mengindividualisir suatu akta secara hukum (Widodo & Harjoko, 2015). Karena pada saat ini banyak terjadinya pemalsuan tanda tangan sehingga sangat penting untuk melakukan identifikasi tanda tangan.
Pada umumnya, untuk pengenalan tanda tangan kebanyakan dilakukan oleh seorang ahli identifikasi tanda tangan dengan membandingkan secara langsung dengan menggunakan mata manusia sendiri yang mana mempunyai kelemahan jika banyak tanda tangan yang perlu diidentifikasi, sehingga terkadang hasil yang diinginkan seringkali kurang tepat. Oleh karena itu, diperlukan sebuah sistem yang mampu menganalisa karakteristik pola tanda tangan sehingga mempermudah dalam identifikasi tanda tangan seseorang.
Pengenalan pola tanda tangan bisa dilakukan dengan menerapkan metode ekstraksi fitur citra. Pada sebuah penelitian lain yaitu sebuah penelitian untuk mengklasifikasikan citra daun dengan menggunakan ekstraksi ciri
Geometric Invariant Moment dan metode K-Nearest Neighbor mampu melakukan klasifikasi didapatkan nilai akurasi sebesar 86,67% yang mana hasil ini menunujukan bahwa penggunaan ekstraksi ciri Geometric Invariant Moment dan metode K-Nearest Neighbor mampu melakukan klasifikasi daun dengan baik (Liantoni, 2015).
Geometric Invariant Moment sendiri merupakan ekstraksi ciri yang menghasilkan tujuh moment yang mana moment-moment tersebut tidak
terpengaruh oleh perubahan scaling, translasi, rotasi dan orientasi (Samad, et al., 2015).
Metode klasifikasi juga dibutuhkan dalam klasifikasi citra tanda tangan. Pada sebuah penelitian tentang pengenalan obyek dengan menggunakan 3 metode klasifikasi yaitu K-Nearest Neighbor, Backpropagation Neural Nework, dan Fuzzy K-Nearest Neighbor
memberikan hasil bahwa klasifikasi dengan
menggunakan K-Nearest Neighbor
mendapatkan nilai akurasi yang paling tinggi dibandingkan dengan metode klasifikasi yang lain yang digunakan dalam penelitian (R.Muralidharan, 2014). Pada sebuah penelitian lain tentang pengenalan gambar wajah dengan menggunakan transformasi wavelet sebagai ekstraksi fitur dan metode K-Nearest Neighbor
sebagai metode klasifikasi untuk menentukan identitas gambar wajah dan menghasilkan nilai akurasi yang tinggi yaitu 95% (Sikki, 2009). K-Nearest Neighbour memiliki beberapa kelebihan yaitu ketangguhan terhadap training data yang memiliki banyak noise dan efektif apabila training data-nya besar (Sikki, 2009).
Berdasarkan latar belakang tersebut, penelitian ini menggunakan ekstraksi ciri
Geometric Invariant Moment. Sedangkan untuk pengklasifikasian tanda tangan menggunakan metode K-Nearest Neighbour. Dengan penelitian ini diharapkan hasil yang didapatkan menjadi solusi yang lebih baik dan menghasilkan tingkat keakuratan yang lebih tinggi dalam pengenalan tanda tangan dan dapat mencegah atau menghindari pemalsuan tanda tangan.
2. GEOMETRIC INVARIANT MOMENT
menyebabkan kesalahan dalam pengenalan atau identifikasi obyek. Metode ini dapat digunakan sebagai pendeskripsi bentuk berdasarkan teori dari moment. Geometric Invariant Moments
pertamakali diperkenalkan oleh Hu. Teknik ini dipilih untuk melakukan ekstraksi ciri citra sejak ciri-ciri yang diperoleh adalah Rotation Scale Translation (RST)-invariant (Liantoni, 2015).
Momen dua dimensi dengan orde (p + q) dari suatu citra digital dengan ukuran M x N
didefinisikan pada persamaan (2.10).
𝑚𝑝𝑞= ∑𝑀−1𝑥=0 ∑𝑁−1𝑦=0𝑥𝑝𝑦𝑞𝑓(𝑥, 𝑦) (2.1)
Dimana p = 0,1,2,… dan q = 0,1,2,…
adalah integer. Selanjutnya momen pusat (central moments) orde (p + q) didefinisikan
Kemudian normalisasi central moments, yang dinotasikan dengan 𝜂𝑝𝑞, didefinisikan pada persamaan (2.13).
Sehingga ketujuh nilai Invariant Moments
dapat diturunkan dari momen kedua dan ketiga. ∅1= 𝜂20+ 𝜂02 (2.5) metode yang menggunakan algoritma
supervised dimana hasil dari data uji yang baru diklasifikan berdasarkan mayoritas dari kategori pada KNN. Tujuan dari algoritma ini adalah mengklasifikasikan obyek baru berdasarkan atribut dan training sample. Klasifikasi menggunakan jumlah terbanyak diantara klasifikasi dari k obyek. Algoritma KNN menggunakan klasifikasi ketetanggaan sebagai nilai prediksi dari data uji yang baru (Sikki, 2009) .
Algoritma metode KNN sangatlah sederhana, bekerja berdasarkan jarak terpendek dari data uji ke training sample untuk menentukan KNN-nya. Training sample
diproyeksikan ke ruang berdimensi banyak,
dimana masing-masing dimensi
merepresentasikan fitur dari data. Ruang ini dibagi menjadi bagian-bagian berdasarkan klasifikasi training sample. Sebuah titik pada ruang ini ditandai kelac c jika kelas c merupakan klasifikasi yang paling banyak ditemui pada k buah tetangga terdekat dari titik tersebut. Dekat atau jauhnya tetangga biasanya dihitung berdasarkan Euclidean Distance yang direpresentasikan pada persamaan (2.1) (Sikki, 2009).
Sistem yang dikembangkan merupakan sistem yang mengimplementasikan metode
Geometric Invariant Moment untuk pengenalan pola tanda tangan. Data yang akan diolah sistem berupa citra tanda tangan. Tahapan perancangan sistem meliputi preprocessing citra, ekstraksi ciri citra dan klasifikasi K-Nearest Neighbour.
4.1.1 Preprocessing
sub bab 2.3.1 Kemudian melakukan proses
thresholding yaitu proses mengubah citra berderajat keabuan menjadi citra biner atau hitam putih sehingga dapat diketahui daerah mana yang termasuk obyek dan background dari citra secara jelas. Metode yang digunakan dalam melakukan proses thresholding adalah metode
Otsu. Tahap preprocessing citra selanjutnya adalah normalisasi citra, mulai dari melakukan proses thinning yang digunakan untuk proes penipisan pada citra. Dalam proses thinning, garis-garis pembentuk citra tanda tangan akan ditipiskan hingga mencapai 1 piksel saja. Algoritma thinning yang digunakan adalah algoritma Zhang Suen. Normalisasi citra selanjutnya adalah melakukan cropping citra dan me-resize citra dengan ukuran 150 x 150 piksel. Diagram alir preprocessing citra ditunjukkan pada Gambar 3.1. Citra hasil dari proses binerisasi ditunjukkan pada Gambar 3.2 dan citra hasil dari proses thinning ditunjukkan pada Gambar 3.3.
Gambar 3.1 Diagram Alir Preprocessing Citra
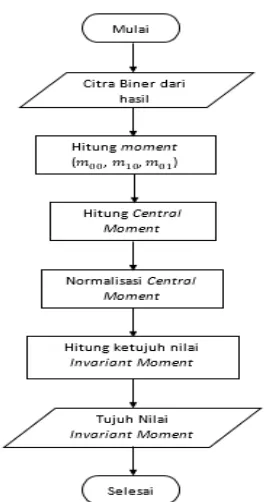
4.1.2 Ekstraksi Ciri
Proses ekstraksi ciri citra membutuhkan citra tanda tangan yang telah dilakukan
preprocessing terlebih dahulu sebagai inputan. Ekstraksi ciri ini akan digunakan untuk mendapatkan ciri/moment dengan menggunakan ektraksi fitur Geometric Invariant Moment. Ciri yang didapatkan berjumlah tujuh moment.
Algoritma ektraksi ciri menggunakan Geometric Invarian Moment ditunjukkan pada Gambar 3.2.
Gambar 3.2 Diagram Alir Proses Ekstraksi Ciri Geometric Invariant Moment
Tahapan ekstraksi ciri citra menggunakan
Geometric Invariant Moment dapat dijelaskan sebagai berikut:
1. Hitung Moment(𝑚00, 𝑚10, 𝑚01)
Hitung moment yang mentransformasikan fungsi citra pada sistem diskrit.
2. Hitung nilai Moment pusat
Setelah tahap pertama dilakukan hitung
moment pusat obyek citra. Tahap ini menghasilkan tujuh nilai moment pusat citra.
3. Normalisasi nilai Moment pusat
Setelah moment pusat ditemukan langkah selanjutnya adalan melakukan normalisasi pada moment pusat citra.
4. Hitung ketujuh nilai Geometric Invariant
Moment
Setelah moment pusat citra dinormalisasi, ketujuh nilai Geometric Invariant Moment dapat dihitung.
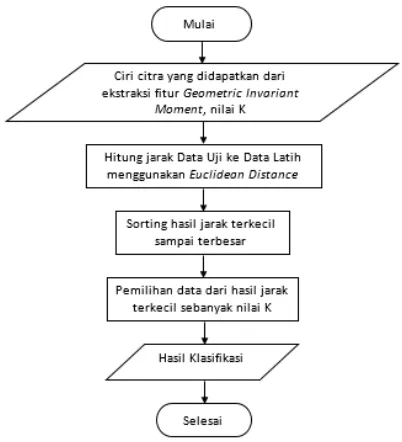
4.1.3 Klasifikasi
mendapatkan jumlah mayoritas kelas yang ada pada sejumlah nilai K tersebut. Proses K-Nearest neighbor tersebut ditunjukkan oleh Gambar 3.3.
Gambar 3.3 Diagram Alir Proses Klasifikasi K-Nearest Neighbor
4.2 Pengukuran Kinerja
Dari sudut pandang klasifikasi , tujuan sistem verifikasi tanda tangan adalah untuk membedakan antara dua kelas yaitu asli dan palsu. Ada beberapa skenario yang berbeda (Zhang, 2010):
1. Correct acceptance (CA)
Sistem dikenai pertanyaan apakah tanda tangan yang diinputkan merupakan milik
signer (pemilik tanda tangan) yang benar dan respon dari sistem adalah positif. 2. False rejection (FR)
Sistem dikenai pertanyaan apakah tanda tangan yang diinputkan merupakan milik
signer (pemilik tanda tangan) yang benar dan respon dari sistem adalah negatif. 3. False acceptance (FA)
Sistem dikenai pertanyaan apakah tanda tangan yang diinputkan merupakan milik
signer (pemilik tanda tangan) yang salah dan respon dari sistem adalah positif.
4. Correct rejection (CR)
Sistem dikenai pertanyaan apakah tanda tangan yang diinputkan merupakan milik
signer (pemilik tanda tangan) yang salah dan respon dari sistem adalah negatif. Dari empat skenario tersebut dalam penelitian ini menggunakan False Acceptance Rate (FAR) dan False Rejection Rate (FRR) untuk mengukur kinerja kualitas hasil program
pengenalan tanda tangan menggunakan ciri
Geometric Invariant Moment. FAR dihitung menggunakan persamaan 3.1 dan FRR dihitung menggunakan persamaan 3.2.
FAR= 𝒋𝒖𝒎𝒍𝒂𝒉 𝑭𝑨
𝒋𝒖𝒎𝒍𝒂𝒉 𝒕𝒂𝒏𝒅𝒂 𝒕𝒂𝒏𝒈𝒂𝒏 𝒑𝒂𝒍𝒔𝒖 𝒚𝒂𝒏𝒈 𝒅𝒊𝒖𝒋𝒊𝒙𝟏𝟎𝟎 (3.1)
FRR = 𝒋𝒖𝒎𝒍𝒂𝒉 𝑭𝑹
𝒋𝒖𝒎𝒍𝒂𝒉 𝒕𝒂𝒏𝒅𝒂 𝒕𝒂𝒏𝒈𝒂𝒏 𝒂𝒔𝒍𝒊 𝒚𝒂𝒏𝒈 𝒅𝒊𝒖𝒋𝒊𝒙𝟏𝟎𝟎 (3.2)
5. HASIL DAN PEMBAHASAN
5.1 Pengujian Fitting
Pengujian fitting digunakan untuk melihat apakah algoritma yang digunakan pada implementasi sistem sudah benar atau tidak.
Tabel 4. 1 Hasil Pengujian Fitting
Pada Tabel 3.1 dapat dilihat bahwa nilai
FRR yang didapatkan saat k=1 dan k=2 adalah 0% untuk setiap jenis data latih. Hasil tersebut sama untuk semua sumber data yang digunakan. Sedangkan saat k=3 nilai FRR mulai berubah. Dengan hasil tersebut dapat membuktikan bahwa algoritma yang digunakan untuk implementasi sistem sudah benar. Hal ini dibuktikan dengan hasil FRR 0% saat k=1 dan k=2. Dengan hasil ini membuktikan bahwa sistem dapat digunakan untuk melakukan pengujian-pengujian selanjutnya.
5.2 Pengujian Jumlah Data Latih
Gambar 4.1 Grafik Hasil Pengujian FAR terhadap Jumlah Data Latih
Pada Gambar 4.1 dapat dilihat bahwa semakin banyak jumlah data latih yang di-training semakin tinggi pula nilai FAR-nya. Nilai
FAR paling kecil didapatkan saat jumlah data latih dengan 5 citra setiap kelas. Data dari Indonesia mendapatkan nilai FAR=16% untuk nilai FAR terkecil, data dari Spanyol mendapatkan nilai FAR=7.5% untuk nilai FAR
terkecil dan data dari Persia mendapatkan nilai
FAR=27% untuk nilai FAR terkecil. Kondisi hasil pengujian FAR yang mendapatkan nilai
FAR terkecil saat menggunakan data latih dengan 5 citra setiap kelas ini selaras dengan yang disampaikan oleh (Widodo & Harjoko, 2015).
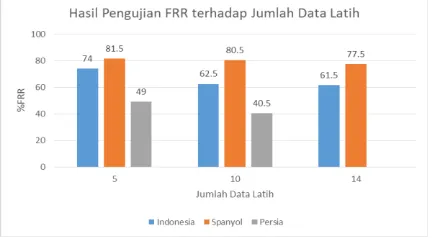
Gambar 4.2 Grafik Hasil Pengujian FRR terhadap Jumlah Data Latih
Pada Gambar 4.2 dapat dilihat bahwa semakin banyak jumlah data latih yang di-training semakin kecil nilai FRR-nya. Hasil pengujian FRR berbanding terbalik dengan pengujian FAR. Nilai FRR paling kecil didapatkan saat jumlah data latih dengan 14 citra setiap kelas. Data dari Indonesia mendapatkan nilai FRR=61.5% untuk nilai FRR terkecil dan data dari Spanyol mendapatkan nilai
FRR=77.5% untuk nilai FRR terkecil. Sedangkan untuk data dari Persia mendapatkan nilai FRR terkecil saat menggunakan data latih dengan 10 citra tanda tangan setiap kelas dengan nilai FRR=77.5%. Kondisi hasil pengujian FRR
seperti ini selaras dengan yang disampaikan oleh (Widodo & Harjoko, 2015).
5.3 Pengujian Nilai k
Pengujian ini merupakan pengujian yang dilakukan untuk mengetahui pengaruh nilai k yang berbeda-beda dalam penerapan metode klasifikasi K-Nearest Neighbour terhadap nilai
FAR dan FRR.
Gambar 4.3 Grafik Hasil Pengujian FAR terhadap Nilai k
Dari Gambar 4.3 telah didapatkan hasil pengujian FAR terhadap nilai k paling kecil adalah saat k bernilai 20 pada semua sumber data dengan nilai FAR=11.4% pada data Indonesia, nilai FAR=7% pada data dari Spanyol dan nilai
FAR=16% pada data dari Persia. Pada data dari Spanyol juga mendapatkan nilai FAR=7% pada saat k=9.
Gambar 4.4 Grafik Hasil Pengujian FRR terhadap Nilai k
Dari Gambar 4.4 telah didapatkan hasil pengujian FRR terhadap nilai k paling kecil adalah saat k=1 dengan nilai FRR=62% pada data dari Indonesia dan nilai FRR=38% pada data dari Persia. Untuk data dari Spanyol, nilai
5.4 Pengujian Variasi Ciri Citra
Proses pengujian jumlah ciri citra dilakukan untuk mengetahui pengaruh variasi ciri citra dalam penerapan ekstraksi ciri Geometric Invariant Moment terhadap nilai FAR dan FRR. Tujuan pengujian ini untuk mencari variasi ciri citra yang terbaik yang memiliki nilai FAR dan
FRR paling baik untuk mengetahui pengaruh dari variasi ciri pada pengujian FAR dan FRR.
Gambar 4.5 Grafik Hasil Pengujian FAR terhadap Variasi Ciri Citra dari Data Indonesia
Gambar 4.6 Grafik Hasil Pengujian FAR terhadap Variasi Ciri Citra dari Data Spanyol
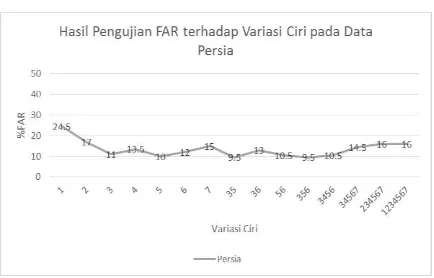
Gambar 4.7 Grafik Hasil Pengujian FAR terhadap Variasi Ciri Citra dari Data Persia
Pada Gambar 4.7 menunjukkan perubahan nilai FAR terhadap variasi ciri citra dengan menggunakan data dari Indonesia. Nilai FAR
paling kecil didapatkan saat menggunakan 1
ciri/moment yaitu moment 7 dengan nilai
FAR=7%. Pada Gambar 6.7 menunjukkan perubahan nilai FAR terhadap variasi ciri citra dengan menggunakan data dari Spanyol. Nilai
FAR paling kecil didapatkan saat menggunakan 4 ciri/moment yaitu dengan menggabungkan
moment 3,4,5, dan 7, saat menggunakan 5
moment yaitu dengan menggabungkan moment
1,3,4,5 dan 7 dan saat menggunakan 6 moment
dengan menggabungkan moment 1,3,4,5,6 dan 7 dengan masing-masing mendapatkan nilai
FAR=7%. Pada Gambar 6.8 menunjukkan perubahan nilai FAR terhadap variasi ciri citra dengan menggunakan data dari Persia. Nilai
FAR paling kecil didapatkan saat menggunakan 2 ciri/moment yaitu menggabungkan moment 3 dan 5 serta saat menggunakan 3 moment yaitu menggabungkan moment 3,5 dan 6 dengan masing-masing mempunyai nilai FAR=9.5%. Pada data dari Spanyol dan Persia saat hanya
menggunakan 1 moment terdapat
kecenderungan yang sama, yaitu mendapatkan nilai FAR terkecil saat menggunakan moment 5 saja dengan FAR=6.5% pada data dari Spanyol dan FAR=10% pada data dari Persia. Saat menggunakan 1 moment saja pada data dari Indonesia, mendapatkan nilai FAR paling kecil saat menggunakan moment 7.
Gambar 4.8 Grafik Hasil Pengujian FRR terhadap Variasi Ciri Citra dari Data Indonesia
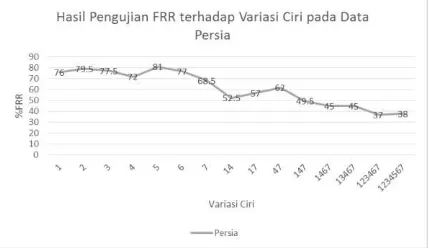
Gambar 4.10 Grafik Hasil Pengujian FRR terhadap Variasi Ciri Citra dari Data Persia
Pada Gambar 6.9 menunjukkan perubahan nilai FRR terhadap variasi ciri citra dengan menggunakan data dari Indonesia. Nilai FRR
paling kecil didapatkan saat menggunakan 5 ciri/moment yaitu dengan menggabungkan
moment 1,2,3,6 dan 7 serta dengan
menggunakan semua moment 1-7 dengan masing-masing mempunyai nilai FRR=61.5%. Pada Gambar 6.10 menunjukkan perubahan nilai
FRR terhadap variasi ciri citra dengan menggunakan data dari Spanyol. Nilai FRR
paling kecil didapatkan saat menggunakan 6 ciri/moment yaitu dengan menggabungkan
moment 2,3,4,5,6 dan 7 dan semua moment 1-7 dengan masing-masing mempunyai nilai
FRR=72%. Pada Gambar 6.11 menunjukkan perubahan nilai FRR terhadap variasi ciri citra dengan menggunakan data dari Persia. Nilai
FRR paling kecil didapatkan saat menggunakan 6 ciri/moment yaitu menggabungkan moment
1,2,3,4,6 dan 7 dengan nilai FRR=37%. Pada data Indonesia dan Spanyol terdapat kecenderungan yang sama yaitu sama-sama mendapatkan nilai FRR terkecil saat menggunakan semua moment dengan
FRR=61.5% untuk data dari Indonesia dan
FRR=72% untuk data dari Spanyol. Sedangkan untuk data dari Persia mendapatkan saat menggunakan semua moment mendapatkan
FRR=38%, berbeda 1% dari nilai FRR terkecil pada data dari Spanyol yaitu 37%.
6. KESIMPULAN DAN SARAN
6.1Kesimpulan
Berdasarkan hasil pengujian dan analisis hasil penelitian ini terhadap pengenalan citra tanda tangan menggunakan ekstraksi ciri Geometric Invariant Moment dapat diambil kesimpulan sebagai berikut.
1. Berdasarkan pengujian fitting bahwa
algoritma yang digunakan untuk
implementasi sistem sudah benar. Hal ini dibuktikan dengan hasil FRR=0% saat k=1 dan k=2.
2. Pada pengujian jumlah data latih nilai FAR terkecil didapatkan saat menggunakan jumlah data latih paling kecil yaitu data latih dengan 5 citra setiap kelas. Semakin banyak jumlah data semakin besar pula nilai FAR -nya. sedangkan nilai FRR terkecil pada pengujian jumlah data latih didapatkan saat menggunakan data latih dengan 14 citra setiap kelas untuk data dari Indonesia dan Spanyol, dan 10 citra setiap kelas untuk data dari Persia. Semakin banyak jumlah data maka semakin kecil nilai FRR yang didapatkan.
3. Pada pengujian nilai k, semakin banyak k yang digunakan nilai FAR yang didapatkan cenderung semakin kecil dan nilai FRR
cenderung semakin besar. Nilai FAR terkecil didapatkan saat k=20 untuk semua sumber data. Sedangkan nilai FRR terkecil didapatkan saat k=3 pada dari Indoensia, k=1 pada data dari Persia dan k=9, k=11 pada data dari Spanyol.
4. Variasi ciri Geometric Invariant Moment yang mempunyai nilai FAR dan FRR terkecil tiap sumber data berbeda. Untuk data dari Indonesia nilai FAR paling kecil didapatkan saat menggunakan moment 7 dengan nilai
FAR=7%. Untuk data dari Spanyol nilai
FAR paling kecil didapatkan saat menggabungkan moment 3,4,5, dan 7, saat menggabungkan moment 1,3,4,5 dan 7 dan saat menggabungkan moment 1,3,4,5,6 dan 7 dengan masing-masing mendapatkan nilai
FAR=7%. Untuk data dari Persia nilai FAR
paling kecil didapatkan saat yaitu menggabungkan moment 3 dan 5 dan saat menggabungkan moment 3,5 dan 6 dengan masing-masing mempunyai nilai
FAR=9.5%. Untuk data dari Indonesia nilai
FRR paling kecil didapatkan saat menggabungkan moment 1,2,3,6 dan 7 dan saat menggunakan semua moment dengan masing-masing mempunyai nilai
FRR=61.5%. Untuk data dari Spanyol nilai
FRR paling kecil didapatkan dengan menggabungkan moment 2,3,4,5,6 dan 7 dan saat menggunakan semua moment dengan masing-masing mempunyai nilai
FRR=72%. Untuk data dari Persia nilai FRR
5. Hasil pengujian FAR dan FRR berbanding terbalik. Sistem dapat mengenali tanda tangan palsu dengan optimal dibuktikan dengan diperolehnya nilai FAR yang relatif kecil pada semua sumber data. Tetapi sistem tidak dapat mengenali tanda tangan asli dengan optimal dibuktikan dengan diperolehnya nilai FRR yang tinggi pada semua sumber data.
6. Ciri Geometric Invariant Moment yang diterapkan global pada suatu citra tidak memberikan akurasi yang tinggi. Mungkin karena ketika menerapkan ciri global, ciri lokal tidak terkenali dengan baik. Hal tersebut berlaku pada citra tanda tangan asli, sedangkan pada citra tanda tangan palsu penerapan ciri Geometric Invariant Moment
secara global memberikan akurasi yang tinggi.
6.2 Saran
Berdasarkan penelitian yang telah dilakukan, maka saran untuk penelitian selanjutnya adalah sebagai berikut.
1. Pada penelitian ini penerapan ciri global
Geometric Invariant Moment menghasilkan nilai FRR yang tinggi. Untuk mendapatkan nilai FRR yang lebih rendah, masih mungkin untuk melakukan pengoptimalan ciri lokal
Geometric Invariant Moment atau dengan mengkombinasikan dengan ciri lain . 2. Masih diperlukan pengembangan untuk
menerapkan seleksi fitur untuk pemilihan variasi ciri citra, seperti melakukan optimasi pada ciri Geometric Invariant Moment untuk memperkecil nilai FAR dan FRR.
DAFTAR PUSTAKA
Liantoni, F., 2015. Klasifikasi Daun Dengan Perbaikan Fitur Citra Menggunakan
Metode K-Nearest Neighbor.
ULTIMATICS, Volume 7.
R.Muralidharan, D., 2014. Object Recognition Using K-Nearest Neighbor Supported By Eigen Value Generated From the Features of an Image. International Journal of Innovative Research in Computer and Communication Engineering, 2(8).
Samad, S., Haq, A. & A.Khan, S., 2015. Orientation Invariant Object Recognitions Using Geometric Moments Invariants and Color Histograms. International Journal
of Computer and Electrical Engineering,
Volume 7.
Sikki, M. I., 2009. Pengenalan Wajah Menggunakan K-Nearest Neighbour Dengan Praproses Transformasi Wavelet.
Paradigma, Volume X.
Widodo, A. W. & Harjoko, A., 2015. Sistem Verifikasi Tanda Tangan Off-Line Berdasar Ciri Histogram of Oriented Gradient (HOG) dan Histogram of Curvature (HoC). Jurnal Teknologi Informasi dan Ilmu Komputer (JTIIK), pp. 1-10.
Zhang, B., 2010. Off-line signature verification and identification by pyramid histogram of oriented gradients. International Journal of Intelligent Computing and Cybernet,