1 STUDI ANALISA KECELAKAAN LALU LINTAS MELALUI
PENDEKATAN SPATIAL POINT PROCESS
Takbir A1 , Sunusi N1 , Islamiyati A1
Jurusan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam
Universitas Hasanuddin
ABSTRAK
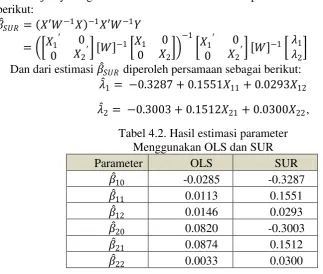
Dalam penelitian ini intensitas kecelakaan lalu lintas diestimasi menggunakan pendekatan Spatial Point Process .Namun berkaitan dengan studi kasus yang dipilih, maka pendekatan tersebut dianggap kurang sempurna. Hal ini diakibatkan adanya korelasi antar galat dalam persamaan yang digunakan sehingga perlu dilakukan proses evaluasi terhadap parameter dari model. Dalam mengevaluasi parameter Spatial Point Process digunakan model Seemingly Unrelated Regression (SUR). Model SUR merupakan bagian dari regresi multivariat dimana persamaan-persamaan dalam model ini nampak tidak berhubungan namun terdapat korelasi antar galat yang digunakan dalam proses estimasi. Berdasarkan proses evaluasi menggunakan model SUR diketahui bahwa nilai 𝜆 (Intensitas) kecelakaan lalu lintas yang diperoleh menggunakan model SUR lebih releven karena mempertimbangkan faktor-faktor yang mempengaruhi segmen jalan .Untuk periode siang hari diperoleh persamaan 𝜆 1 = −0.3287 + 0.1551𝑋11+ 0.0293𝑋12 dan untuk periode
malam 𝜆 2 = −0.3003 + 0.1512𝑋21+ 0.0300𝑋22 . Dari persamaan tersebut selanjutnya diperoleh nilai prediksi terhadap nilai intensitas kecelakaan.
Kata kunci : Spatial Point Process, Seemingly Unrelated Regression (SUR), Proses Poisson, Regresi Multivariat.
1. Pendahuluan
Kecelakaan adalah suatu peristiwa yang bersifat acak karena kejadian kecelakaan tersebut dapat terjadi kapan dan dimana saja, tanpa memandang waktu dan tempat (DLLAJ, 1997). Salah satu model stokastik yang dapat menerangkan fenomena yang bersifat acak baik dalam ruang maupun waktu disebut Point Process.
Penelitian ini merupakan kajian ulang untuk menganalisa kasus kecelakaan lalu lintas dengan menggunakan konsep Spatial Point Process. Namun berkaitan dengan kasus kecelakaan lalu lintas yang terjadi dalam sebuah segmen jalan, maka pendekatan tersebut dianggap kurang sempurna. Hal ini diakibatkan adanya korelasi antar galat dalam persamaan yang digunakan sehingga perlu dilakukan proses evaluasi terhadap parameter dari model. Dalam mengevaluasi parameter Spatial Point Process digunakan model Seemingly Unrelated Regression (SUR). Model Seemingly Unrelated Regression (SUR) yang akan digunakan adalah model SUR dengan pendekatan Generalized Least Squares (GLS).
2 (2.1) menggunakan data kecelakaan lalu lintas yang akan terjadi sepanjang Jl. Mesjid Raya – Jl. Urip Sumoharjo - Jl. Perintis Kemerdekaan Kota Makassar.
2. Tinjauan Pustaka 2.1. Point Process
Dalam statistika, point process atau proses titik digunakan untuk menggambarkan fenomena alam yang terlokalisasi dalam ruang atau waktu. Point process sendiri merupakan salah satu metode yang digunakan untuk menggambarkan sistem stokastik yang terjadi dalam pola tertentu, dengan penggambaran peristiwa tersebut berupa titik- titik kejadian yang terjadi dalam suatu selang waktu atau ruang tertentu.
2.1.1. Spatial Point Process
Suatu Spatial Point Process merupakan suatu model yang berguna untuk pola acak titik- titik dalam ruang berdimensi 𝑑, dimana 𝑑 ≥2. Sebagai contoh, jika dibuat peta lokasi kejadian gempa pada suatu tahun tertentu, maka peta ini merupakan pola acak titik- titik dalam dua dimensi memberikan ilustasi proses titik spasial, dimana pada lokasi B terdapat 3 kejadian.
Untuk beberapa model khusus (Poisson Process dan Renewal Process),
𝜏1,𝜏2,… saling bebas. Proses titik juga dapat diformulasikan dengan menggunakan perhitungan selang, yaitu
𝑁 𝑎,𝑏 = 𝑁(𝑏)− 𝑁(𝑎), untuk 0≤ 𝑎 ≤ 𝑏
yakni banyaknya kejadian dalam selang (𝑎,𝑏].
2.1.2. Temporal Point Process
Terdapat beberapa perbedaan antara proses titik satu dimensi dengan proses titik berdimensi lebih tinggi. Pada proses titik berdimensi satu ditemukan sifat terurut alami (natural ordering) yang mana hal tersebut tidak dijumpai pada proses titik yang berdimensi lebih tinggi. Proses titik berdimensi satu dapat dinyatakan secara matematika dalam berbagai cara yang berbeda, antar lain : dapat melalui waktu kejadian (arrival times) 𝑡𝑖 < 𝑡𝑖+1 < … dengan 𝑡𝑖 merupakan waktu pada saat kejadian ke –𝑖.
2.2. Proses Poisson
Definisi 2.2
𝑁 𝑡 ,𝑡 ≥0 adalah suatu proses Poisson dengan laju λ, λ> 0, , jika :
i. 𝑁 𝑡 = 0
ii. Proses memiliki kenaikan yang saling bebas
iii. Banyaknya kejadian dalam selang 𝑡 berdistribusi Poisson dengan rata- rata λt. Berlaku untuk semua 𝑠,𝑡 ≥ 0,
𝑃 𝑁 𝑡+𝑠 − 𝑁 𝑠 =𝑛 =𝑒−𝜆𝑡(𝜆𝑡𝑛)𝑛
3 (2.2)
(2.4)
(2.5) (2.3)
(2.6) Berdasarkan kondisi (iii) proses poisson memiliki kenaikan yang stasioner dan
𝐸[𝑁(𝑡)] = 𝜆𝑡
sehingga 𝜆 = 𝐸[𝑁(𝑡)] /𝑡, merupakan rata- rata banyaknya kejadian yang terjadi per waktu t. Hal tersebut yang menyebabkan 𝜆 disebut sebagai laju.
2.2.1. Proses Poisson Stasioner
Proses poisson stasioner dapat didefinisikan oleh persamaan berikut, dengan menggunakan proses menghitung 𝑁(𝑎𝑖,𝑏𝑖] untuk menunjukkan banyaknya kejadian yang terjadi pada selang setengah terbuka (𝑎𝑖,𝑏𝑖] dengan 𝑎𝑖 <𝑏𝑖 ≤ 𝑎𝑖+1 :
𝑃 𝑁 𝑎𝑖,𝑏𝑖 = 𝑛𝑖,𝑖 = 1,…,𝑘 = 𝜆(𝑏𝑖𝑛−𝑎𝑖)𝑛𝑖
𝑖! 𝑒
−𝜆((𝑏𝑖−𝑎𝑖) 𝑘
𝑖=1
Definisi diatas memiliki tiga sifat penting, yaitu :
i. Banyaknya titik pada setiap interval 𝑎𝑖,𝑏𝑖 berdistribusi Poisson;
ii. Banyaknya titik pada selang yang saling lepas adalah variable acak yang saling bebas;
iii. Berdistrbusi stasioner : hanya bergantung pada panjang selang 𝑏𝑖 − 𝑎𝑖
Mean 𝑀(𝑎,𝑏] dan variansi 𝑉(𝑎,𝑏] dari banyaknya titik pada selang (𝑎,𝑏] diberikan oleh :
𝑀(𝑎,𝑏] = 𝜆 𝑏 − 𝑎 = 𝑉(𝑎,𝑏)
𝜆 yang konstan adalah laju rata rata titik pada sebuah proses. Atau juga dapat disebut sebagai intensitas dari sebuah proses.
Sekarang perhatikan hubungan, yang ditunjukkan oleh persamaan berikut :
𝑃 𝑁 0,𝜏 = 0 =𝑒−𝜆(𝜏),
2.3. Analisis Regresi Berganda
Secara umum, model regresi linear ganda dengan variabel dependen Y dan p variabel bebas 𝑋1,𝑋2,… ,𝑋𝑝 dapat ditulis sebagai berikut:
𝑌𝑖 = 𝛽0+𝛽1𝑋𝑖1 + 𝛽2𝑋𝑖2+ …+𝛽𝑝𝑋𝑖𝑝 +𝜀𝑖
dengan:
𝑌𝑖 adalah nilai variabel dependen dalam pengamatan ke-i 𝛽0,𝛽1,𝛽2…,𝛽𝑝 adalah parameter yang tidak diketahui nilainya
4 Makassar dengan banyaknya kecelakaan (Y), intensitas kecelakaan (λ), rawan tidaknya terjadi kecelakaan (𝑋11) dan jumlah korban kecelakaan(𝑋12).
3.2Metode Analisis
Metode dari penelitian ini dibagi dalam beberapa tahap :
1. Menggambarkan titik-titik kejadian kecelakaan lalu lintas ke dalam sebuah Proses Poisson Stasioner.
2. Merumuskan intensitas kecelakaan dalam satu segmen jalan. 3. Mengevaluasi parameter Spatial Point Process dengan model SUR.
4. Menguji signifikansi parameter dari model Seemingly Unrelated Regression (SUR).
4. HASIL DAN PEMBAHASAN
4.1.Konstruksi Kasus Kecelakaan Lalu Lintas dengan Model Spatial Point Process
Dengan menggunakan proses menghitung 𝑁(𝑘𝑚𝑖,𝑘𝑚𝑖+1] yang menunjukkan banyaknya kejadian kecelakaan lalu lintas yang terjadi pada segmen (𝑘𝑚𝑖,𝑘𝑚𝑖+1].
Proses Poisson Stasioner dapat didefinisikan sebagai berikut:
𝑃 𝑁(𝑘𝑚𝑖,𝑘𝑚𝑖+1] = 𝑛𝑖,𝑖= 0,…,𝐾𝑀
Untuk kejadian kecelakaan dalam satu segmen 𝑘𝑚𝑖 adalah jarak kilometer dari awal ruas jalan raya, 𝐾𝑀 adalah total jarak panjang jalan raya dan 𝜆 adalah parameter distribusi Poisson umum.
Untuk mengevaluasi 𝜆𝑗𝑖 secara bersama dalam satu system digunakan model Seemingly Unrelated Regression (SUR), model SUR digunakan untuk memperhitungkan pengaruh galat yang saling berkorelasi dalam sebuah system persamaan.
Kemudian waktu dibagi ke dalam dua periode yaitu siang dan malam yang masing-masing dimodelkan kedalam satu persamaan regresi dimana setiap persamaan memiliki parameter yang dapat ditemukan dengan metode OLS biasa.
5 Periode waktu dibagi kedalam waktu siang dan malam dengan asumsi bahwa laju kecelakaan antara siang dan malam itu berbeda. Sehingga diperoleh intensitas kecelakaan distribusi Poisson untuk kasus nonhomogen secara umum adalah sebagai berikut :
𝜆𝑗𝑖 = 𝜆𝑗 𝑥 𝑃𝑘𝑒𝑐𝑒𝑙𝑎𝑘𝑎𝑎𝑛 , 𝑋𝜖 (𝑘𝑚𝑖,𝑘𝑚𝑖+1] , j = siang , malam
Intensitas keseluruhan dari kecelakaan adalah banyaknya kecelakaan per segmen jalan dibagi dengan total keselurukan kecelakaan. Hal tersebut tidak relevan dengan kasus dimana intensitas sebuah segmen jalan masih akan dipengaruhi oleh jumlah kecelakaan intensitas kecelakaan yang terjadi di segmen sebelummya. Berdasarkan hal tersebut perlu dilakukan evaluasi terhadap 𝜆𝑗𝑖 .
4.2 Analisis kecelakaan lalu lintas yang terjadi sepanjang Jl. Mesjid Raya – Jl. Urip Sumoharjo - Jl. Perintis Kemerdekaan Kota Makassar.
Pada bagian ini, akan dilakukan analisis data untuk model Spatial Point Process dengan menggunakan data kecelakaan lalu lintas 𝑌1 dan 𝑌2 . 𝑌1 dan 𝑌2 adalah data
jumlah kecelakaan yang telah dibagi kedalam 18 segmen. Selanjutnya untuk mengetahui intensitas kecelakaan di tiap segmen dengan membagi jumlah kecelakaan ditiap segmen dengan total keseluruhan kecelakaan yang terjadi. Intensitas kecelakaan
𝜆1 dan 𝜆2 secara umum dirangkum pada tabel 4.1 berikut:
Tabel 4.1. Jumlah kecelakaan dan intensitas kecelakaan di tiap segmen
Periode Siang Periode Malam Periode Siang Periode Malam
𝑌1 𝜆1 𝑌2 𝜆2 𝑌1 𝜆1 𝑌2 𝜆2
12 0.059 12 0.059 16 0.079 16 0.079
8 0.039 8 0.039 15 0.074 15 0.074
11 0.054 11 0.054 12 0.059 12 0.059
10 0.049 10 0.049 11 0.054 11 0.054
11 0.054 11 0.054 8 0.039 8 0.039
10 0.049 10 0.049 10 0.049 10 0.049
11 0.054 11 0.054 8 0.039 8 0.039
9 0.044 9 0.044 11 0.054 11 0.054
15 0.074 15 0.074 15 0.074 15 0.074
Nilai 𝜆1 dan 𝜆2 pada tabel 4.1 dinilai tidak sempurna dengan konsep spatial point process. Oleh karena itu perlu dilakukan evaluasi terhadap nilai 𝜆1 dan 𝜆2. Untuk mengaluasinya nilai 𝜆1 dan 𝜆2 dibentuk kedalam sebuah persamaan regresi linear dengan memperhitungkan faktor-faktor lain yang dianggap mempengaruhi nilai intensitas kecelakaan.
Data variabel independen adalah sebagai berikut:
𝑋1,1 = 1 0 1 1 1 1 1 0 1 1 1 1 1 0 1 0 1 1 ′,
6
𝑋2,1 = 1 0 1 1 0 1 1 0 1 1 1 0 1 0 1 0 1 1 ′,
𝑋2,2 = 15 9 14 13 14 12 14 12 10 19 16 13 14 9 13 8 12 16 ′, untuk periode malam.
Langkah awal pengerjaan data yaitu dengan membentuk persamaan regresi linear dengan metode ordinary least square untuk masing-masing persamaan.
Kemudian didapatkan hasil sebagai berikut:
𝜆1 = −0.0285 + 0.0113𝑋11+ 0.0146𝑋2 𝜆2 = 0.0820 + 0.0874𝑋21+ 0.0033𝑋22,
Berdasarkan hasil estimasi dengan menggunakan metode OLS diperoleh matriks variansi-kovariansi dan korelasi residual untuk model dengan variabel dependen intensitas kecelakaan sebagai berikut:
Dilakukan Uji Lagrange Multiplier, uji ini digunakan untuk mengetahui apakah terdapat korelasi contemporaneously antar error persamaan dari periode siang dan malam. Berdasarkan perhitungan yang diperoleh 𝜇 = 11.133. Dengan taraf signifikansi 10%. Nilai statistik uji LM lebih besar dari nilai statistik table chi-square yaitu sebesar 3.841, maka disimpulkan terdapat korelasi contemporaneous. Hal ini yang mendasari penggunaan metode SUR.
Selanjutnya digunakan matriks W untuk memperoleh estimator SUR sebagai berikut:
Dan dari estimasi 𝛽 𝑆𝑈𝑅 diperoleh persamaan sebagai berikut:
𝜆 1 = −0.3287 + 0.1551𝑋11+ 0.0293𝑋12
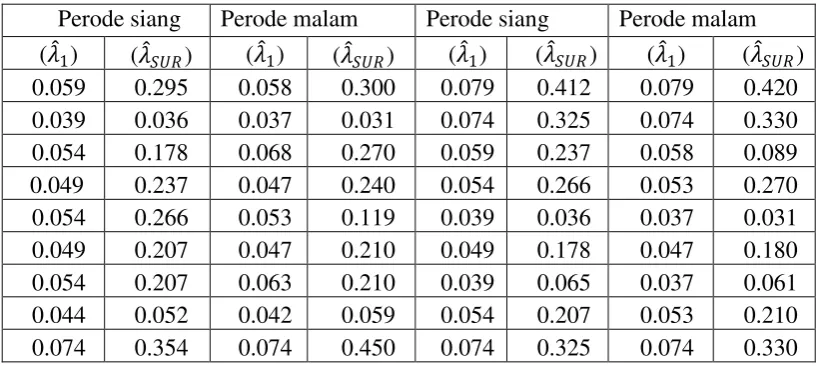
Selanjutnya dengan menggunakan nilai estimasi yang didapatkan akan dilakukan prediksi intensitas kecelakaan lalu lintas yang akan terjadi di sepanjang Jl. Mesjid Raya – Jl. Urip Sumoharjo - Jl. Perintis Kemerdekaan Kota Makassar.
(4.4)
7 Tabel 4.3. intensitas kecelakaan lalu lintas hasil evaluasi
Perode siang Perode malam Perode siang Perode malam (𝜆 1) (𝜆 𝑆𝑈𝑅) (𝜆 1) (𝜆 𝑆𝑈𝑅) (𝜆 1) (𝜆 𝑆𝑈𝑅) (𝜆 1) (𝜆 𝑆𝑈𝑅)
0.059 0.295 0.058 0.300 0.079 0.412 0.079 0.420
0.039 0.036 0.037 0.031 0.074 0.325 0.074 0.330
0.054 0.178 0.068 0.270 0.059 0.237 0.058 0.089
0.049 0.237 0.047 0.240 0.054 0.266 0.053 0.270
0.054 0.266 0.053 0.119 0.039 0.036 0.037 0.031
0.049 0.207 0.047 0.210 0.049 0.178 0.047 0.180
0.054 0.207 0.063 0.210 0.039 0.065 0.037 0.061
0.044 0.052 0.042 0.059 0.054 0.207 0.053 0.210
0.074 0.354 0.074 0.450 0.074 0.325 0.074 0.330
Nilai 𝜆 yang didapatkan dari proses SUR dinilai lebih relevan karena mempertimbangkan faktor-faktor yang mempengaruhi intensitas kecelakaan.
Kesimpulan dan Saran 5.1Kesimpulan
Berdasarkan hasil dan pembahasan di atas, dapat disimpulkan bahwa :
1. Berdasarkan evaluasi parameter Spatial Point Process yang dilakukan dengan menggunakan model SUR ditemukan hasil seperti berikut:
𝜆 1 = −0.3287 + 0.1551𝑋11 + 0.0293𝑋12 (Periode siang) 𝜆 2 = −0.3003 + 0.1512𝑋21+ 0.0300𝑋22 , (Periode malam) Hal ini menunjukkan bahwa:
a. Setiap segmen jalan yang dinilai rawan terjadi kecelakaan meningkatkan intensitas kecelakaan menjadi 0.1551 pada siang hari dan 0.1512 pada malam hari.
b. Setiap peningkatan satu korban kecelakaan di setiap segmen jalan meningkatkan intensitas kecelakaan menjadi 0.293 pada siang hari dan 0.3 pada malam hari.
2. Dari hasil estimasi model SUR didapatkan Nilai 𝜆 pada tabel (4.3) yang merupakan prediksi intensitas kecelakaan lalu lintas yang akan terjadi sepanjang Jl. Mesjid Raya – Jl. Urip Sumoharjo - Jl. Perintis Kemerdekaan Kota Makassar. 5.2Saran
8 DAFTAR PUSTAKA
Anton, Howard dan Shris Rorres. (2005) “Aljabar Linier edisi 8”.(Alih bahasa :Irzam Harmein, Julian Gressando, editor : Amalia Safitri). Jakarta: Erlangga.
Baddeley, Adrian, (2007) “Spatial Point Processes and Their Aplications”, University of Western Australia.
Daley, D.J. dan Jones, Vere D.(2005), “An Introduction to the Theory of Point Processes – Volume I: Elementary Theory and Methods”, 2nd Edition, Springer, New York. Dwiningsih, E. dan Urwatul Wutsqa, D. (2008) “Model Seemingly Unrelated Regressions
(SUR)”, Jurusan Pendidikan Matematika FMIPA Universitas Negeri Yogyakarta. Karaganis, Anastassion, dan Mimis, Angelos,(2006)” A Spatial Point Process for