i
TUGAS AKHIR
PENENTU WAKTU SERVIS KENDARAAN BERMOTOR
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Fakultas Sains dan Teknologi Universitas Sanata Dharma
Disusun oleh:
VALENTINUS FERY WIJAYANTO NIM : 055114013
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2 0 1 1
ii
FINAL PROJECT
VEHICLE REPARATION TIME DETERMINATION
Presented as Partial Fulfillment of the Requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
Science and Technology Faculty of Sanata Dharma University
By:
VALENTINUS FERY WIJAYANTO NIM : 055114013
ELECTRICAL ENGINEERING STUDY PROGRAM
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2 0 1 1
iii
iv
v
PERNYATAAN KEASLIAN KARYA
Saya menyatakan dengan sesungguhnya bahwa tugas akhir ini tidak
memuat karya atau bagian karya orang lain, kecuali telah disebutkan dalam
kutipan dan daftar pustaka sebagaimana layaknya karya ilmiah.
Yogyakarta, 28 Januari 2011
Valentinus Fery Wijayanto
vi
HALAMAN PERSEMBAHAN DAN MOTO HIDUP
MOTTO :
“Ad Maiorem Dei Gloriam”
“Keep Moving Forward”
Tugas akhir ini kupersembahkan untuk :
Tuhan Yesus Kristus
Kedua Orang Tua Tercinta
Dosen-Dosen Pembimbingku
Teman-teman yang selalu mendukungku
vii
LEMBAR PERNYATAAN PERSETUJUAN
PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN
AKADEMIS
Yang bertanda tangan dibawah ini, saya mahasiswa Universitas Sanata Dharma:
Nama : Valentinus Fery Wijayanto
Nomor Mahasiswa : 055114013
Demi pengembangan ilmu pengetahuan, saya memberikan kepada perpustakaan
Universitas Sanata Dharma karya ilmiah saya yang berjudul :
PENENTU WAKTU SERVIS KENDARAAN BERMOTOR
beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan kepada
perpustakaan Universitas Sanata Dharma hak untuk menyimpan, mengalihkan dalam
bentuk media lain, mengelolanya dalam bentuk pangkalan data, mendistribusikan secara
terbatas, dan mempublikasikannya di internet atau media lain untuk kepentingan akademis
tanpa perlu meminta ijin dari saya maupun memberikan royalti kepada saya selama tetap
mencantumkan nama saya sebagai penulis.
Demikian pernyataan ini yang saya buat dengan sebenarnya.
Yogyakarta, 28 Januari 2011
Yang Menyatakan,
Valentinus Fery Wijayanto
viii
INTISARI
Perawatan kendaraan bermotor sangatlah penting untuk menjamin supaya kendaraan yang kita miliki tetap awet. Hal ini membuat para pengguna kendaraan bermotor untuk rajin dan rutin menservis kendaraannya. Oleh karena itu pengguna harus memiliki suatu sistem pada kendaraannya supaya dapat mengingatkan kapan kendaraan harus mendapatkan perawatan. Sistem ini akan memperingatkan pengguna untuk segera menservis kendaraannya jika jarak tempuh yang telah ditentukan terlewati. Hal ini akan mengurangi kemungkinan kerusakan mesin yang parah pada kendaraan bermotor, khususnya sepeda motor.
Sistem ini menggunakan sensor photo reflector sebagai sensor jarak. Sensor akan mendeteksi jumlah putaran roda kendaraan. Dengan menggunakan sebuah mikrokontroler, jumlah putaran roda nantinya akan diolah untuk menentukan jarak yang telah ditempuh kendaraan. Jarak tempuh dan teks peringatan akan ditampilkan melalui LCD. Led indikator digunakan sebagai tanda peringatan kepada pengguna.
Penelitian ini telah berhasil membuat suatu alat penentu waktu servis kendaraan. Alat ini dapat bekerja dengan baik dan dapat digunakan untuk penggunaan sehari-hari.
Kata kunci : servis kendaraan, sensor photo reflector, mikrokontroler AT89S52
ix
ABSTRACT
Motor vehicle maintenance is very important to ensure that our vehicles remain durable. This condition make the motor vehicle user to be deligent and routine for servicing their vehicles. There for the users should have a system in their vehicle in order to reminded when the vehicles should get a maintenance. This system will warn the users to service the vehicle immediately if the predetermined mileage has passed, so will decrease the possibility of severe engine failure on motor vehicles,especially motor cycles.
This system uses photo reflector sensor as a distance sensor. Sensor will detect the rotation of vehicle wheels. Using a microcontroler, number of spinning wheels will be processed to determine the distance that has been taken. Mileage and warning text will be displayed through a LCD. Led indicator is use as a warning sign to user.
This research has successed in producing a vehicle reparation time determination device. This device is suitable for daily usage.
Keyword : vehicle reparation, photo reflector sensor, microcontroler AT89S52
x
KATA PENGANTAR
Puji syukur kepada Tuhan Yesus Kristus atas segala rahmat dan karunia-Nya
sehingga tugas akhir dengan judul “Penentu Waktu Servis Kendaraan Bermotor” ini dapat
terselesaikan dengan baik. Karya ini dimaksudkan penulis untuk memenuhi salah satu
syarat memperoleh gelar sarjana teknik program studi Teknik Elektro.
Penulis menyadari bukan hanya dari kekuatan diri sendiri namun juga dari banyak
pihak yang telah membantu dengan caranya masing-masing sehingga tugas akhir ini dapat
diselesaikan. Oleh karena itu penulis ingin mengucapkan terima kasih kepada :
1. Kedua orang tua yang telah memberi dukungan dan doa.
2. Ibu Ir. Prima Ari S., M.T., selaku dosen pembimbing yang dengan penuh
kesabaran membimbing, memberi saran serta kritik kepada penulis dalam
menyelesaikan tugas akhir ini.
3. Bapak dan ibu dosen serta laboran jurusan Teknik Eleltro yang telah
memberikan ilmu dan pengetahuan kepada penulis selama masa kuliah.
4. Seluruh teman-teman jurusan Teknik Elektro USD.
5. Seluruh pihak yang tidak dapat penulis sebutkan satu per satu yang telah
membantu penulis hingga terselesaikannya tugas akhir ini.
Dengan rendah hati penulis sadar bahwa penulisan tugas akhir ini masih jauh dari
sempurna, oleh sebab itu berbagai kritik dan saran untuk perbaikan tugas akhir ini sangat
diharapkan. Akhir kata, semoga tugas akhir ini dapat bermanfaat bagi semua pihak. Terima
kasih.
Yogyakarta, 28 Januari 2011
Penulis
xi
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN JUDUL DALAM BAHASA INGGRIS ... ii
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP ... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xi
DAFTAR GAMBAR ... xiii
DAFTAR TABEL ... xv
BAB I PENDAHULUAN ... 1
1.1. Latar Belakang Masalah ... 1
1.2. Tujuan dan Manfaat ... 2
1.3. Batasan Masalah ... 2
1.4. Metodologi Penelitian ... 3
BAB II DASAR TEORI ... 4
2.1. Mikrokontroler AT89S52 ... 4
2.2. Liqiud Crystal Display (LCD) 16x2 ... 7
2.3. Sensor Photo Reflector ... 9
2.4. Light Emitting Dioda (LED) ... 11
2.5. Perawatan Mesin Sepeda Motor ... 13
2.6. Ukuran Ban Sepeda Motor ... 13
2.7. Pelumas ... 15
2.8. Aki (Accu) ... 16
2.9. Hampiran Kuadrat Terkecil... 17
BAB III RANCANGAN PENELITIAN ... 18
xii
3.1. Perancangan Perangkat Keras ... 19
3.1.1. Rangkaian Sensor Jarak ... 19
3.1.2. Rangkaian Mikrokontroler AT89S52 ... 21
3.1.3. Rangkaian Tombol ... 23
3.1.4. Rangkaian LCD ... 25
3.1.5. Rangkaian Indikator LED ... 26
3.1.6. Rangkaian Regulator Tegangan ... 27
3.2. Perancangan Rangkaian Keseluruhan ... 28
3.3. Perancangan Perangkat Lunak ... 28
3.3.1. Program Utama ... 28
3.3.2. Sub Rutin Tombol Pilihan ... 31
3.3.3. Sub Rutin Indikator LED dan Teks Peringatan ... 32
BAB IV HASIL DAN PEMBAHASAN ... 34
4.1. Implementasi Penentu Waktu Servis Kendaraan Bermotor ... 34
4.2. Pengujian Perangkat Keras ... 36
4.2.1. Hasil Pengujian Sistem Keseluruhan ... 36
4.2.2. Pengujian LED Indikator dan Teks Peringatan ... 39
4.2.3. Pengujian Rangkaian Sensor Jarak ... 41
4.2.4. Pengujian LCD ... 41
4.2.5. Pengujian Tombol ... 42
4.2.6. Pengujian Daya Alat ... 43
4.3. Analisis Hasil Pengukuran ... 45
4.3.1. Pengukuran Jarak ... 45
4.4. Pengujian Perangkat Lunak... 50
BAB V KESIMPULAN DAN SARAN ... 54
5.1. Kesimpulan ... 54
5.2. Saran ... 54
DAFTAR PUSTAKA ... 55
LAMPIRAN ... 57
xiii
DAFTAR GAMBAR
Gambar 2.1. Konfigurasi Pin Mikrokontroler AT89S52 ... 5
Gambar 2.2. Rangkaian Tombol Reset ... 6
Gambar 2.3. Konstruksi LCD ... 7
Gambar 2.4. LCD 2 x 16 ... 8
Gambar 2.5. Sensor Photo Reflector QRB1114 ... 10
Gambar 2.6. Rangkaian Sensor Photo Reflector ... 10
Gambar 2.7. Kontruksi LED ... 11
Gambar 2.8. Rangkaian LED ... 12
Gambar 2.9. Kode Ban ... 14
Gambar 2.10. Penampang Ban Melintang ... 14
Gambar 3.1. Blok Diagram Penentu Waktu Servis Kendaraan Bermotor ... 18
Gambar 3.2. Konstruksi Sensor Jarak Tampak Depan ... 20
Gambar 3.3. Konstruksi Sensor Jarak Tampak Samping ... 20
Gambar 3.4. Rangkaian Photo Reflector ... 20
Gambar 3.5. Rangkaian Mikrokontroler AT89S52 ... 21
Gambar 3.6. Rangkaian Tombol Logika Aktif Rendah ... 23
Gambar 3.7. Rangkaian Tombol Jarak Servis ... 24
Gambar 3.8. Rangkaian Tombol Tinggi Ban ... 25
Gambar 3.9. Rangkaian LCD Mode 4 bit ... 26
Gambar 3.10. Rangkaian LED ... 26
Gambar 3.11. Rangkaian Indikator LED ... 27
Gambar 3.12. Rangkaian Regulator Tegangan 5 V ... 27
Gambar 3.13. Ilustrasi Rangkaian Keseluruhan dan Fungsi Tiap Port ... 28
Gambar 3.14. Diagram Alir Program Utama ... 30
Gambar 3.15. Diagram Alir Subrutin Tombol Pilihan... 31
Gambar 3.16. Diagram Alir Subrutin Indikator LED dan Teks Peringatan ... 33
Gambar 4.1. Implementasi Penentu Waktu Servis Kendaraan Bermotor. a) Rangkaian Keseluruhan. b) Tampak Luar ... 34
Gambar 4.2. Konstruksi Tampilan LCD dan LED Indikator ... 35
Gambar 4.3. Konstruksi Peletakan Sensor Photo Reflector ... 35
xiv
Gambar 4.4. Konstruksi Tombol Masukan ... 36
Gambar 4.5. Kondisi Alat Saat Pertama Dihidupkan ... 37
Gambar 4.6. Kondisi “Mesin Anda OK” ... 37
Gambar 4.7. Kondisi “Waktunya Servis” ... 38
Gambar 4.8. Kondisi “Mesin Anda Gawat” ... 38
Gambar 4.9. Kondisi LCD Saat Kontak ON ... 39
Gambar 4.10. Kondisi LCD Saat Kontak OFF ... 39
Gambar 4.11. Kondisi Saat Kontak ON. a) Kondisi Kontak ON. b) Tampilan LCD ... 42
Gambar 4.12. Kondisi LCD Kontak OFF a) Kondisi Kontak OFF. b) Tampilan LCD ... 42
Gambar 4.13. Grafik Perbandingan Jarak Tempuh dan Error Jarak ... 47
Gambar 4.14. Grafik Perbandingan Jarak Tempuh dan Presentase Error Jarak ... 47
xv
DAFTAR TABEL
Tabel 2.1. Fungsi Pin pada Port 3 ... 5
Tabel 2.2. Simbol Pin-pin LCD ... 8
Tabel 2.3. Daftar Warna LED dan VLED ... 12
Tabel 2.4. Jenis dan Fungsi Zat Aditif ... 15
Tabel 4.1. Pengujian LED Indikator dan Teks Peringatan ... 40
Tabel 4.2. Hasil Pengujian Rangkaian Sensor dan Komparator ... 41
Tabel 4.3. Pengujian Tombol ... 43
Tabel 4.4. Pengujian Daya ... 44
Tabel 4.5. Perbandingan Jarak Terukur Pada Alat dan Odometer ... 45
Tabel 4.6. Tabel Error Jarak ... 48
Tabel 4.7. Tabel Error Jarak ... 49
xvi
BAB I
PENDAHULUAN
1.1. Latar Belakang Masalah
Sepeda motor adalah salah satu kendaraan bermotor yang terjangkau harganya oleh
masyarakat dan sangat efisien untuk membawa barang maupun penumpang ke tempat yang
cukup jauh. Oleh karena itu banyak masyarakat menjadikannya sebagai alat transportasi
utama[1]. Sepeda motor pun bisa lebih hemat dibandingkan transportasi massal yang
belum sempurna terutama bila tinggal di tempat yang kekurangan transportasi
massal[2].Secara umum, pengguna sepeda motor tentu berharap bisa mengendarai sepeda
motornya untuk jangka waktu yang panjang. Untuk itu pemilik sepeda motorharus
memperhatikanperawatan mesin karena kondisi mesinsepeda motorjuga tergantung dari
pemeliharaan dan kebiasaan pemiliknya dalam mengendarainya[1][3].
Bagian utama kendaraan bermotor yang perlu perhatian khusus dalam hal
perawatan adalah bagian mesin.Mesin merupakan penggerak utama dari kendaraan
bermotor.Mesin membutuhkan pelumas atau oli.Pelumas merupakan penopang utama dari
kerja mesin dan juga menentukan performa serta daya tahan mesin. Fungsi pelumas yaitu
melumasi (lubricating) seluruh komponen yang bergerak di dalam mesin untuk mencegah terjadinya kontak langsung antar komponen yang terbuat dari logam akibat perputaran
mesin[4].
Pelumas memiliki kadar kekentalan (viskositas). Kadar kekentalan pada pelumas dapat berkurang karena gesekan yang terjadi pada mesin kendaraan. Apabila kadar
kekentalan pelumas sudah tidak baik lagi, maka mesin akan cepat panas. Hal ini
disebabkan karena berkurangnya kemampuan pelumas untuk melumasi mesin sehingga
gesekan yang ditimbulkan semakin besar. Apabila hal ini dibiarkan terus menerus maka
akan terjadi kerusakan pada mesin kendaraan.
Untuk menghindari terjadinya kerusakan mesin, maka harus dilakukan perawatan
pada kendaraan bermotor secara rutin. Pada umumnya waktu perawatan kendaraan
bermotor berdasarkan dari jarak yang ditempuh oleh kendaraan itu dan jenis pelumas yang
dipakai[5]. Ada dua jenis pelumas, yakni mineral dan sintetis. Pelumas mineral adalah
xvii
campuran antara minyak bumi yang ditambah zat aditif, sedangkan pelumas sintetis adalah
minyak bumi yang melalui proses kimiawi diubah menjadi bahan sintetis. Daya tahan
bahan sintesis terhadap panas lebih tinggi sehingga pelumas tidak mudah rusak dan tahan
lebih lama terhadap oksidasi[4].
Oleh karena itu, perawatan mesin sepeda motor khususnya dalam hal penggantian
pelumas harus dilakukan sebelum kadar kekentalan pelumas berkurang dan mengakibatkan
kerusakan mesin.
Dengan kesibukan yang ada, seringkali pengguna kendaraan bermotor melupakan
jadwal perawatan yang seharusnya dilakukan.Untuk itu maka diperlukan suatu sistem yang
dapat mengingatkan pengguna kendaraan bermotor apabila kendaraan bermotor yang
dipakai sudah pada waktunya untuk memperoleh perawatan guna menghindari kerusakan
yang timbul pada mesin secara lebih dini.
1.2. Tujuan Dan Manfaat
Penelitian ini bertujuan untuk menghasilkan alat yang dapat berfungsi sebagai
penentu waktu servis kendaraan bermotor secara dini sehingga pengguna dapat melakukan
perawatan pada kendaraannya tepat waktu.
Manfaat dari penelitian ini adalah untuk mencegah terjadinya kerusakan yang parah
pada mesin kendaraan, khususnya sepeda motor akibat kurangnya perawatan mesin
kendaraan bermotor.
1.3. Batasan Masalah
Agar perancangan sistem dan pembahasan laporan tentang alat penentu waktu
servis kendaraan bermotor ini menjadi lebih spesifik maka diberikan beberapa batasan
sebagai berikut:
1. Pembuatan alat penentu waktu servis kendaraan bermotor ini menggunakan
sensor photo reflector untuk menghitung jumlah putaran roda.
2. Mikrokontroler yang digunakan untuk mengolah data atau pulsa dari sensor
adalah ATMEL AT89S52.
3. Masukan berupa tombol pilihan untuk menentukan jarak servis dan tinggi ban.
4. Keluaran menggunakan tiga buah indikator LED dan display LCD.
xviii
5. Indikator LED terdiri dari tiga buah LED dan digunakan sebagai peringatan
awal kepada pemakai saat jarak tempuh telah berubah. Indikator LED akan
menyala dengan spesifikasi berikut :
a. Jika jarak yang ditempuh belum mencapai jarak servis, maka LED 1
(berwarna hijau) akan menyala.
b. Jika jarak yang tempuh telah melampaui 90% dari jarak servis dan sebelum
mencapai jarak servis, maka LED 2 (berwarna kuning) akan menyala.
c. Jika jarak yang ditempuh telah melebihi jarak servis, maka LED 3 (berwarna
merah) akan menyala.
6. Display LCD akan menampilkan jarak tempuh dan teks peringatan.
7. Spesifikasi velg roda yang digunakan yaitu sebesar 14 inchi.
1.4. Metodologi Penelitian
Penulisan skripsi ini menggunakan metode :
1. Studi pustaka, menggunakan buku-buku referensi dan jurnal-jurnal.
2. Perencanaan dan perancangan subsistem hardware dan software.
3. Proses pengambilan data. Proses pengambilan data dilakukan dengan melihat
dan mengukur jarak yang telah ditempuh oleh sepeda motor yang telah
digunakan.
4. Pengujian alat yang langsung dipasangkan pada kendaraan bermotor untuk
membandingkan jarak yang terukur oleh alat dengan jarak yang telah ditempuh
sebenarnya dengan menggunakan odometer. Pengujian dilakukan dengan cara
on the road, yaitu mengendarai sepeda motor dengan menggunakan alat hingga mendapatkan jarak tempuh yang ditentukan.
5. Analisis dan penyimpulan hasil percobaan. Penyimpulan hasil percobaan dapat
dilakukan dengan menghitung presentase error yang terjadi.
xix
BAB II
DASAR TEORI
2.1. Mikrokontroler AT89S52[6][7]
Mikrokontroler AT89S52 adalah salah satu anggota dari keluarga MCS-51/52 yang
dilengkapi dengan internal 8 Kbyte Flash PEROM (Programmable and Erasable Read Only Memory), yang memungkinkan memori program untuk dapat diprogram kembali. AT89S52 dirancang oleh Atmel sesuai dengan instruksi standar dan susunan pin 80C5.
Fitur-fitur yang dimiliki AT89S52 antara lain:
a. Sebuah CPU (Central Processing Unit ) 8 Bit. b. 256 byte RAM (Random Acces Memory ) internal.
c. Empat buah port I/O, yang masing-masing terdiri dari 8 bit
d. Osilator internal dan rangkaian pewaktu.
e. Dua buah timer/counter 16 bit
f. Lima buah jalur interupsi (2 buah interupsi eksternal dan 3 interupsi internal).
g. Sebuah port serial dengan full duplex UART (Universal Asynchronous Receiver Transmitter).
h. Mampu melaksanakan proses perkalian, pembagian, dan Boolean.
i. EPROM yang besarnya 8 KByte untuk memori program.
j. Kecepatan maksimum pelaksanaan instruksi per siklus adalah 0,5 µs pada
frekuensi clock 24 MHz. Apabila frekuensi clock mikrokontroler yang digunakan adalah 12 MHz, maka kecepatan pelaksanaan instruksi adalah 1 µs.
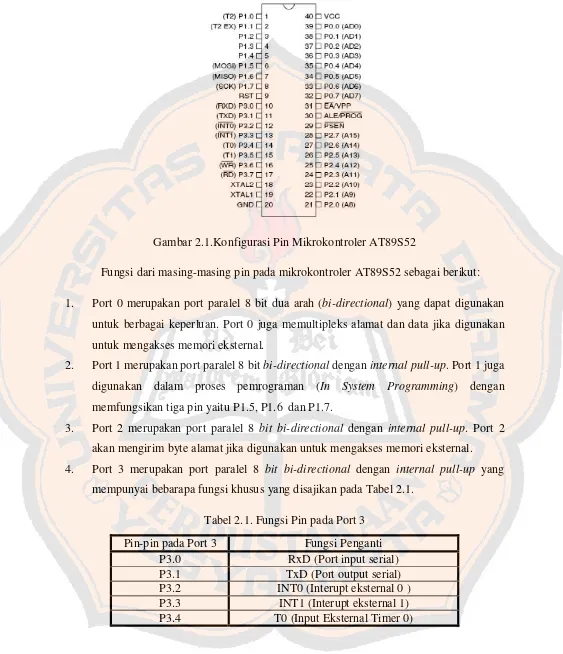
Mikrokontroler AT89S52 mempunyai 40 pin dengan catu daya tunggal 5 Volt.
Ke-40 pin tersebut disajikan pada Gambar 2.1.
xx
Gambar 2.1.Konfigurasi Pin Mikrokontroler AT89S52
Fungsi dari masing-masing pin pada mikrokontroler AT89S52 sebagai berikut:
1. Port 0 merupakan port paralel 8 bit dua arah (bi-directional) yang dapat digunakan untuk berbagai keperluan. Port 0 juga memultipleks alamat dan data jika digunakan
untuk mengakses memori eksternal.
2. Port 1 merupakan port paralel 8 bit bi-directional dengan internal pull-up. Port 1 juga digunakan dalam proses pemrograman (In System Programming) dengan memfungsikan tiga pin yaitu P1.5, P1.6 dan P1.7.
3. Port 2 merupakan port paralel 8 bit bi-directional dengan internal pull-up. Port 2 akan mengirim byte alamat jika digunakan untuk mengakses memori eksternal.
4. Port 3 merupakan port paralel 8 bit bi-directional dengan internal pull-up yang mempunyai bebarapa fungsi khusus yang disajikan pada Tabel 2.1.
Tabel 2.1. Fungsi Pin pada Port 3
Pin-pin pada Port 3 Fungsi Penganti P3.0 RxD (Port input serial) P3.1 TxD (Port output serial) P3.2 INT0 (Interupt eksternal 0 ) P3.3 INT1 (Interupt eksternal 1) P3.4 T0 (Input Eksternal Timer 0)
xxi
Tabel 2.1. (Lanjutan) Fungsi Pin pada Port 3
Pin-pin pada Port 3 Fungsi Penganti P3.5 T1 (Input Eksternal Timer 1)
P3.6 WR (Perintah write pada memori eskternal) P3.7 RD (Perintah read pada memori eksternal)
Pada rangkaian oscillator mikrokontroler AT89S52, untuk menghitung besarnya periode menjalankan satu instruksi ke instruksi berikutnya dapat dihitung menggunakan
persamaan 2.1.
osc
f
T 12 (2.1)
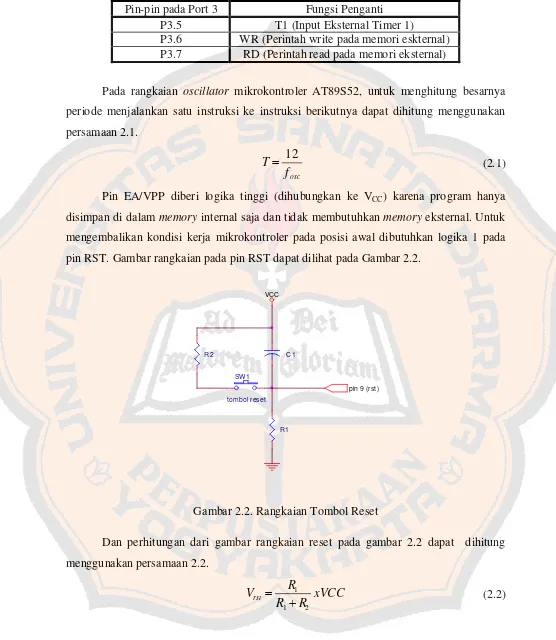
Pin EA/VPP diberi logika tinggi (dihubungkan ke VCC) karena program hanya
disimpan di dalam memory internal saja dan tidak membutuhkan memory eksternal. Untuk mengembalikan kondisi kerja mikrokontroler pada posisi awal dibutuhkan logika 1 pada
pin RST. Gambar rangkaian pada pin RST dapat dilihat pada Gambar 2.2.
Gambar 2.2. Rangkaian Tombol Reset
Dan perhitungan dari gambar rangkaian reset pada gambar 2.2 dapat dihitung
menggunakan persamaan 2.2.
xVCC R
R R Vrst
2 1
1
(2.2)
VCC
C1 R2
SW1
tombol reset
R1
pin 9 (rst)
xxii
2.2. Liquid Crystal Display (LCD) 16x2 [8]
LCD adalah komponen yang berfungsi untuk menampilkan (display) suatu
karakter.Bahan utama LCD berupa Liquid Crystal. Apabila diberi arus listrik sesuai dengan jalur yang telah dirancang pada konstruksi LCD, Liquid Crystal akan berpendar menghasilkan suatu cahaya dan cahaya tersebut akan membentuk suatu karakter tertentu.
Gambar konstruksi LCD [9] disajikan pada Gambar 2.3.
Gambar 2.3. Konstruksi LCD
LCD yang sering digunakan adalah jenis LCD M1632 [10]. M1632 merupakan
modul LCD dengan tampilan 2 x 16 (2 baris, 16 kolom) dengan konsumsi daya rendah.
Modul tersebut dilengkapi dengan mikrokontroler yang didesain khusus untuk
mengendalikan LCD. Mikrokontroler HD44780 buatan Hitachi yang berfungsi sebagai
pengendali LCD memiliki CGROM (Character General Read OnlyMemory), CGRAM (Character General Random Access Memory), dan DDRAM (Display Data Random Access Memory). LCD bertipe ini memungkinkan pemrogram untuk mengoperasikan komunikasi data secara 8 bit atau 4 bit. Jika menggunakan jalur data 4 bit akan ada 7 jalur
data (3 untuk jalur kontrol & 4 untuk jalur data). Jika menggunakan jalur data 8 bit maka
akan ada 11 jalur data (3 untuk jalur kontrol & 8 untuk jalur data). Tiga jalur kontrol ke
LCD ini adalah EN (Enable), RS (RegisterSelect) dan R/W (Read/Write).Gambar dari LCD 2 x 16 disajikan pada Gambar 2.4.
xxiii
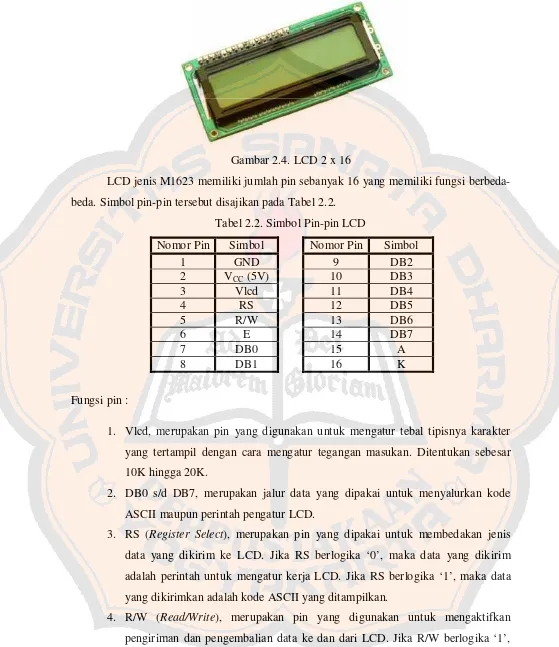
Gambar 2.4. LCD 2 x 16
LCD jenis M1623 memiliki jumlah pin sebanyak 16 yang memiliki fungsi
berbeda-beda. Simbol pin-pin tersebut disajikan pada Tabel 2.2.
Tabel 2.2. Simbol Pin-pin LCD
Nomor Pin Simbol 1 GND 2 VCC (5V)
3 Vlcd 4 RS 5 R/W
6 E
7 DB0 8 DB1
Nomor Pin Simbol 9 DB2 10 DB3 11 DB4 12 DB5 13 DB6 14 DB7 15 A 16 K
Fungsi pin :
1. Vlcd, merupakan pin yang digunakan untuk mengatur tebal tipisnya karakter
yang tertampil dengan cara mengatur tegangan masukan. Ditentukan sebesar
10K hingga 20K.
2. DB0 s/d DB7, merupakan jalur data yang dipakai untuk menyalurkan kode
ASCII maupun perintah pengatur LCD.
3. RS (Register Select), merupakan pin yang dipakai untuk membedakan jenis data yang dikirim ke LCD. Jika RS berlogika ‘0’, maka data yang dikirim
adalah perintah untuk mengatur kerja LCD. Jika RS berlogika ‘1’, maka data
yang dikirimkan adalah kode ASCII yang ditampilkan.
4. R/W (Read/Write), merupakan pin yang digunakan untuk mengaktifkan pengiriman dan pengembalian data ke dan dari LCD. Jika R/W berlogika ‘1’,
ii
maka akan diadakan pengambilan data dari LCD. Jika R/W berlogika ‘0’, maka
akan diadakan pengiriman data ke LCD.
5. E (Enable), merupakan sinyal sinkronisasi. Saat E berubah dari logika ‘1’ ke ‘0’, maka data di DB0 s/d DB7 akan diterima atau diambil dari port
mikrokontroler.
6. A (Anoda) dan K (Katoda), merupakan pin yang digunakan untuk menyalakan backlight dari layar LCD.
2.3. Sensor
Photo Reflector
[11]
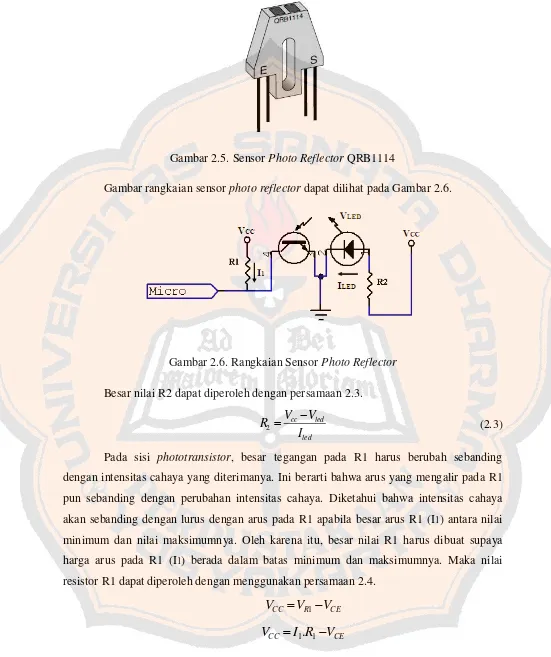
Photo reflector adalah sebuah sensor yang merupakan penggabungan dioda infrared (label “E”) sebagai sumber cahaya dan phototransistor (label “S”) sebagai detektor cahaya yang dikemas dalam satu kemasan.
Phototransistor merupakan salah satu komponen yang berfungsi sebagai detektor cahaya yang dapat mengubah efek cahaya menjadi sinyal listrik. Karena itu,
phototransistor termasuk dalam detektor optik[12].
Bahan utama dari phototransistor adalah silikon atau germanium, sama seperti pada transistor jenis lainnya. Phototransistor juga memiliki dua tipe seperti transistor yaitu tipe NPN dan tipe PNP. Phototransistor sebenarnya tidak berbeda dengan transistor biasa, hanya saja phototransistor ditempatkan dalam suatu material yang transparan sehingga memungkinkan cahaya (cahaya infra red) mengenainya (daerah basis)[12].
Cara kerja photo reflector yaitu dioda infra redakan terpancar dan mengenai permukaan benda lalu dipantulkan dan ditangkap oleh phototransistor.Prinsip kerja dari photo reflector adalah jika phototransistor dapat menerima pantulan sinar infra red makaphototransistor tersebut akan on sehingga output-nya akan berlogika low (nol). Sebaliknya jika antara phototransistor tidak dapat menerima pantulan sinar infra red dengan baik maka phototransistortersebut akan off sehingga output dari kolektor akan berlogika high (satu)[13].
Sensor photo reflector yang digunakan adalah QRB1114. Gambar fisik sensor QRB1114 dapat dilihat pada Gambar 2.5.
iii
Gambar 2.5. Sensor Photo Reflector QRB1114
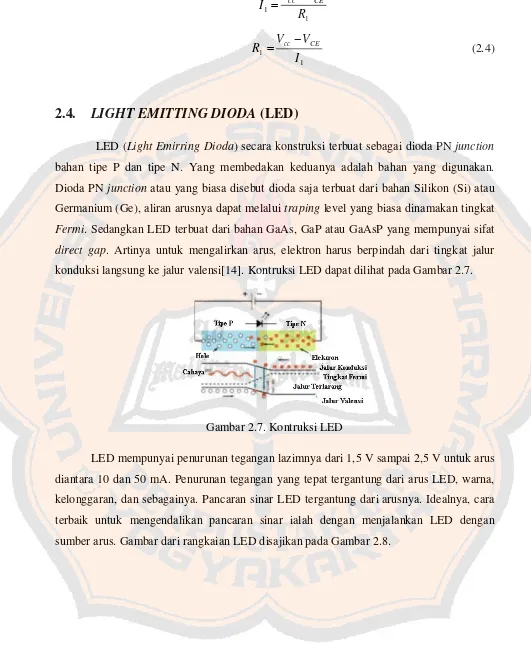
Gambar rangkaian sensor photo reflector dapat dilihat pada Gambar 2.6.
Gambar 2.6. Rangkaian Sensor Photo Reflector
Besar nilai R2 dapat diperoleh dengan persamaan 2.3.
led led cc
I V V
R2 (2.3)
Pada sisi phototransistor, besar tegangan pada R1 harus berubah sebanding dengan intensitas cahaya yang diterimanya. Ini berarti bahwa arus yang mengalir pada R1
pun sebanding dengan perubahan intensitas cahaya. Diketahui bahwa intensitas cahaya
akan sebanding dengan lurus dengan arus pada R1 apabila besar arus R1 (I1) antara nilai
minimum dan nilai maksimumnya. Oleh karena itu, besar nilai R1 harus dibuat supaya
harga arus pada R1 (I1) berada dalam batas minimum dan maksimumnya. Maka nilai
resistor R1 dapat diperoleh dengan menggunakan persamaan 2.4.
CE R
CC
V
V
V
1
CE
CC
I
R
V
V
1.
1
iv
1 1
R V V
I cc CE
1 1
I V V
R cc CE (2.4)
2.4.
LIGHT EMITTING DIODA
(LED)
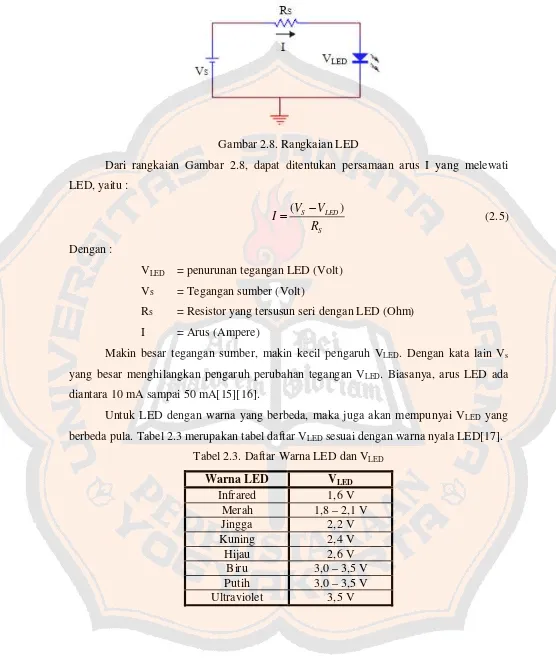
LED (Light Emirring Dioda) secara konstruksi terbuat sebagai dioda PN junction bahan tipe P dan tipe N. Yang membedakan keduanya adalah bahan yang digunakan.
Dioda PN junction atau yang biasa disebut dioda saja terbuat dari bahan Silikon (Si) atau Germanium (Ge), aliran arusnya dapat melalui traping level yang biasa dinamakan tingkat Fermi. Sedangkan LED terbuat dari bahan GaAs, GaP atau GaAsP yang mempunyai sifat direct gap. Artinya untuk mengalirkan arus, elektron harus berpindah dari tingkat jalur konduksi langsung ke jalur valensi[14]. Kontruksi LED dapat dilihat pada Gambar 2.7.
Gambar 2.7. Kontruksi LED
LED mempunyai penurunan tegangan lazimnya dari 1,5 V sampai 2,5 V untuk arus
diantara 10 dan 50 mA. Penurunan tegangan yang tepat tergantung dari arus LED, warna,
kelonggaran, dan sebagainya. Pancaran sinar LED tergantung dari arusnya. Idealnya, cara
terbaik untuk mengendalikan pancaran sinar ialah dengan menjalankan LED dengan
sumber arus. Gambar dari rangkaian LED disajikan pada Gambar 2.8.
v
Gambar 2.8. Rangkaian LED
Dari rangkaian Gambar 2.8, dapat ditentukan persamaan arus I yang melewati
LED, yaitu :
S LED S
R V V
I ( ) (2.5)
Dengan :
VLED = penurunan tegangan LED (Volt)
VS = Tegangan sumber (Volt)
RS = Resistor yang tersusun seri dengan LED (Ohm)
I = Arus (Ampere)
Makin besar tegangan sumber, makin kecil pengaruh VLED. Dengan kata lain Vs
yang besar menghilangkan pengaruh perubahan tegangan VLED. Biasanya, arus LED ada
diantara 10 mA sampai 50 mA[15][16].
Untuk LED dengan warna yang berbeda, maka juga akan mempunyai VLED yang
berbeda pula. Tabel 2.3 merupakan tabel daftar VLED sesuai dengan warna nyala LED[17].
Tabel 2.3. Daftar Warna LED dan VLED
Warna LED VLED
Infrared 1,6 V Merah 1,8 – 2,1 V Jingga 2,2 V Kuning 2,4 V Hijau 2,6 V
Biru 3,0 – 3,5 V Putih 3,0 – 3,5 V Ultraviolet 3,5 V
vi
2.5. Perawatan Mesin Sepeda Motor [18]
Sepeda motoradalah sebuah mesin yang terbuat dari ribuan komponen. Secara
umum, pengguna sepeda motor tentu berharap bisa mengendarai sepeda motornya untuk
jangka panjang. Untuk itu pemilik sepeda motor harus memperhatikanperawatan mesin
karena kondisi mesinsepeda motorjuga tergantung dari pemeliharaan dan kebiasaan
pemiliknya dalam mengendarainya. Pemeliharaan mesin dan pelumas sepeda motor
amatlah vital[19]. Hal ini besar pengaruhnya terhadap jangka waktu penggantian pelumas
sepeda motor.
Banyak faktor yang mempengaruhi pemeliharaan mesin dan penggantian pelumas.
Salah satu faktor tersebut adalah jarak yang telah tempuh oleh sepeda motor tersebut.
Semakin jauh jarak yang ditempuh maka semakin perlu mesin sepeda motor mendapatkan
perawatan dan penggantian pelumas. Dengan mendapatkan perawatan mesin serta
penggantian pelumas secara tepat waktu dapat mencegah kerusakan yang parah pada
sepeda motor[20].
Periode penggantian pelumas mesin sepeda motor sesuai rekomendasi pabrikan
sepeda motor adalah sekitar 2000 km hinggga 2500 km, namun juga bisa mencapai 3000
km [19][20]. Hal ini tergantung dari jenis pelumas yang digunakan juga[19][21].
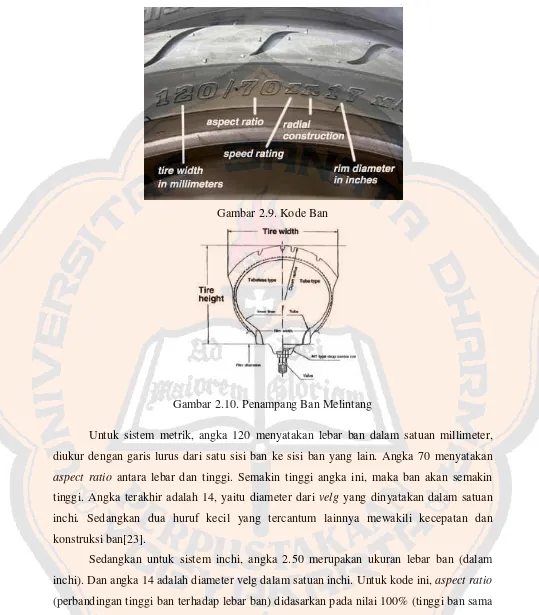
2.6. Ukuran Ban Sepeda Motor
Ban sepeda motor mempunyai ukuran yang bermacam-macam. Sebagai indikator
dari spesifikasi teknisnya, produsen ban menuliskan uraian (kode) beberapa spesifikasi
teknis ban tersebut di dinding ban (side wall tyre). Kode ban motor didesain untuk memberitahu apa yang perlu diketahui tentang ban tersebut. Ada dua macam sistem kode
ban sepeda motor, yaitu sistem metrik (metric system) dan sistem inchi (inch system)[22]. Contoh kode ban sistem metrik adalah 120/70-14. Sedangkan contoh kode ban sistem inchi
adalah 2.50-14. Gambar kode ban dapat dilihat pada Gambar 2.9 dan 2.10[23].
vii
Gambar 2.9. Kode Ban
Gambar 2.10. Penampang Ban Melintang
Untuk sistem metrik, angka 120 menyatakan lebar ban dalam satuan millimeter,
diukur dengan garis lurus dari satu sisi ban ke sisi ban yang lain. Angka 70 menyatakan
aspect ratio antara lebar dan tinggi. Semakin tinggi angka ini, maka ban akan semakin tinggi. Angka terakhir adalah 14, yaitu diameter dari velg yang dinyatakan dalam satuan inchi. Sedangkan dua huruf kecil yang tercantum lainnya mewakili kecepatan dan
konstruksi ban[23].
Sedangkan untuk sistem inchi, angka 2.50 merupakan ukuran lebar ban (dalam
inchi). Dan angka 14 adalah diameter velg dalam satuan inchi. Untuk kode ini, aspect ratio (perbandingan tinggi ban terhadap lebar ban) didasarkan pada nilai 100% (tinggi ban sama
dengan lebar ban)[23].
Karena dalam proyek tugas akhir yang digunakan adalah keliling roda, maka
besarnya rentang keliling roda yang dipakai dalam perancangan dapat diperkirakan dengan
viii
menghitung dari kode ban yang ada. Untuk ban dengan sistem inchi yang berkode 2.50-14,
keliling ban yaitu :
Kell = π x d
= π x [(2 x tinggi ban) + (diameter velg)] = π x [(2 x 2,50 x 2,54 cm) + (14 x 2,54 cm)]
= 151,67 cm
2.7. Pelumas [22]
Pelumas adalah penopang utama dari kerja sebuah mesin. Bukan itu saja, bahkan
pelumas juga menentukan performa dan daya tahan mesin. Semakin baik kualitas pelumas
yang digunakan, semakin baik pula performa dan daya tahan mesin. Fungsi pelumas bukan
hanya sebagai pelumas saja, melainkan juga sebagai pendingin dan pembersih mesin.
Sebagai pelumas, pelumas melumasi (lubricating) seluruh komponen yang bergerak di
dalam mesin untuk mencegah terjadinya kontak langsung antar komponen yang terbuat
dari logam. Dalam hal ini, unsur kekentalan (viskositas) sangat penting[4].
Dahulu, pelumas tidak memakai aditif. Kelemahannya, dipergunakan 1500
kilometer sudah perlu diganti. Maka untuk memperbaikinya ditambah zat aditif tersebut.
Jenis dan fungsi bahan aditif dapat dilihat pada Tabel 2.4[24].
Tabel 2.4. Jenis dan Fungsi Zat Aditif [11]
Jenis Fungsi
Peningkat angka viskositas Mengurangi perubahan terhadap suhu, iritkan bahan bakar, hemat pemakaian pelumas, mudah start dalam keadaan dingin.
Deterjen, Dispersan Menjaga agar kotoran karbon dan sebagainya tetap tersuspensi dalam pelumas, sampai pada saat penggantian tiba.
Senyawa Alkali Menetralkan asam, mencegah korosi karena serangan asam. Anti-Aus, Pengubah
Gesekan
Membentuk film pelindung pada onderdil mesin. Mengurangi aus, menghemat bahan bakar.
Inhibitor Oksidasi Mencegah/mengontrol oksidasi pelumas, pembentukan, pernis/sludge dan zat organik korosif. Membatasi kenaikan viskositas yang terjadi selama pemakaian.
Inhibitor Karet Mencegah karat pada permukaan logam, membentuk film permukaan atau menetralkan asam.
Penekan Titik Tuang Memperendah titik beku pelumas sehingga mudah mengalir pada suhu rendah.
Zat Anti Buih Mengurangi buih dalam mesin.
ix
Pelumas modern merupakan cairan amat kompleks, sebagaimana fungsinya
yaitu[24]:
1. Menghalangi kontak logam ke logam yang mempercepat aus, menghemat
hilangnya energi karena gesekan berlebihan.
2. Mencegah serangan kimia atas logam.
3. Mendispersi pengotor, agar tidak menjadi endapan yang berbahaya bagi mesin.
4. Mendinginkan onderdil mesin.
5. Menjaga agar dirinya sendiri tidak mengurai atau rusak.
2.8. Aki (Accu)
Accu adalah salah satu jenis baterai isi ulang, yang berfungsi memasok energi
listrik ke sebuah kendaraan bermotor untuk keperluan Starting (menyalakan motor stater), Lighting (Lampu) dan Ignition (pengapian). Keberadaannya merupakan salah satu langkah untuk memberikan kenyamanan penggunaan kendaraan[25].
Accu ini berasal dari kata accumulator yaitu alat untuk mengakumulasi sesuatu,
dalam hal ini muatan listrik dengan melakukan penyimpanan saat kekurangan dan
pengaliran pada saat tersedia, dipergunakan[26].
Pada umumnya, accu menyediakan tegangan sebesar 12 volt. Tegangan ini didapat
dengan cara menghubungkan enam sel galvanik secara “seri”. Setiap sel menyediakan 2,1 volt, jadi apabila di charge penuh, akan menghasilkan 2,1 volt x 6 sel = 12,6 volt.
Kapasitas baterai adalah jumlah ampere jam (Ah = kuat arus/Ampere x waktu/hour),
berarti baterai dapat memberikan/menyuplai sejumlah isinya secara rata-rata sebelum tiap
selnya menyentuh tegangan/voltase turun (drop voltage) yaitu sebesar 1,75 V atau
tegangan aki telah mencapai 10,5 volt (1,75volt x 6). Daya yang mampu disediakan oleh
aki dapat diperoleh dengan persamaan 2.6.
= (2.6)
dengan :
P = Daya aki (Watt)
V = Tegangan aki (Volt)
I = Arus aki (Ampere/jam)
x
Dengan demikian aki dengan tegangan ‘V’ dan arus sebesar ‘I’ mampu mensuplai alat
dengan daya ‘P’ selama satu jam penuh. Sedangkan daya tahan aki untuk dapat mensuplai
suatu alat dengan daya tertentu hingga mencapai tegangan minimumnya dapat diperoleh
dengan persamaan 2.7.
= (2.7)
2.9. Hampiran Kuadrat Terkecil
Suatu masalah yang sering dijumpai di dalam penerapan adalah mencari suatu
persamaan yang dapat mewakili suatu kumpulan data percobaan. Kita tahu bahwa sebuah
garis lurus ditentukan oleh dua buah titik, sebuah parabola ditentukan oleh tiga buah titik,
sebuah polinom kubik ditentukan olah empat titik dan seterusnya[27].
Jika terdapat sekelompok data yang mempunyai hubungan antara x dan y tampak
hampir linear, maka hal yang terbaik yaitu menemukan suatu fungsi linear = + dari
data tersebut. Jika titik-titik data yang ada yaitu
( , ) , ( , ) , ………, ( , ) .
Idealnya setiap titik tersebut terletak pada garis lurus, dengan kata lain kita
menginginkan bahwa a dan b yang memenuhi masing-masing dari k persamaan 2.8.
+ = = 1, 2, ………, . (2.8)
Setiap simpangan titik data dari garis = + tersebut akan diukur dengan
persamaan 2.9 yang merupakan jarak vertikal dari titik data ke garis linear[27].
= − ( − ) = 1, 2, ………, .(2.9)
Dengan matrik dapat didefinisikan dengan persamaan 2.10.
= 1 1
⋮ ⋮
1
, = , = ⋮ , =
⋮ (2.10)
Untuk matriks A berukuran m x n dengan m > n, maka solusi kuadrat terkecil bagi
sistem linear AX = Y didapat denga persamaan 2.11[27].
= (2.11)
xi
BAB III
RANCANGAN PENELITIAN
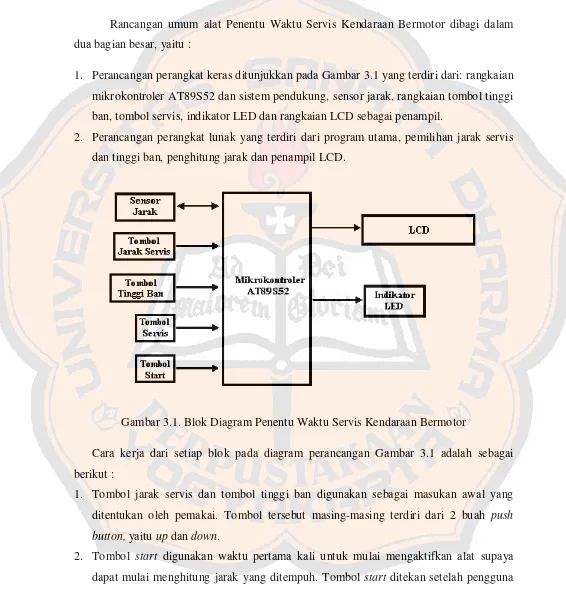
Rancangan umum alat Penentu Waktu Servis Kendaraan Bermotor dibagi dalam
dua bagian besar, yaitu :
1. Perancangan perangkat keras ditunjukkan pada Gambar 3.1 yang terdiri dari: rangkaian
mikrokontroler AT89S52 dan sistem pendukung, sensor jarak, rangkaian tombol tinggi
ban, tombol servis, indikator LED dan rangkaian LCD sebagai penampil.
2. Perancangan perangkat lunak yang terdiri dari program utama, pemilihan jarak servis
dan tinggi ban, penghitung jarak dan penampil LCD.
Gambar 3.1. Blok Diagram Penentu Waktu Servis Kendaraan Bermotor
Cara kerja dari setiap blok pada diagram perancangan Gambar 3.1 adalah sebagai
berikut :
1. Tombol jarak servis dan tombol tinggi ban digunakan sebagai masukan awal yang
ditentukan oleh pemakai. Tombol tersebut masing-masing terdiri dari 2 buah push button, yaitu up dan down.
2. Tombol start digunakan waktu pertama kali untuk mulai mengaktifkan alat supaya dapat mulai menghitung jarak yang ditempuh. Tombol start ditekan setelah pengguna mengeset nilai jarak tempuh dan tinggi ban yang sesuai.
xii
3. Sensor jarak akan menghitung putaran roda dengan mendeteksi putaran cakram pada
sepeda motor. Apabila terjadi putaran, maka jarak yang ditempuh akan bertambah
sesuai dengan perbandingan antara putaran dan jarak. Sensor jarak ini menggunakan
sensor photo reflector.
4. Mikrokontroler akan membandingkan jarak yang telah ditempuh dengan jarak tempuh
terbaik kendaraan bermotor untuk segera dilakukan perawatan.
5. Indikator LED dan teks peringatan LCD akan menyala dengan spesifikasi berikut :
a. LED 1 (berwarna hijau) menyala
Keadaan jika jarak tempuh belum mencapai 90% dari jarak servis yang ditentukan
(jarak tempuh < 90% x jarak servis).
Teks peringatan LCD akan menampilkan “Mesin Anda OK”.
b. LED 2 (berwarna kuning) menyala
Keadaan jika jarak tempuh telah mencapai 90% dari jarak servis hingga mencapai
jarak servis yang telah ditentukan (90% x jarak servis ≤ jarak tempuh).
Teks peringatan LCD akan menampilkan “Waktunya Servis”.
c. LED 3 (berwarna merah) menyala
Keadaan jika jarak tempuh telah melampaui jarak servis yang telah ditentukan
(jarak tempuh > jarak servis).
Teks peringatan LCD akan menampilkan “Mesin Anda Gawat”.
6. Tombol servis digunakan pada saat kendaraan bermotor diberikan perawatan serta
untuk mengembalikan jarak yang telah ditempuh menjadi keadaan awal atau menjadi 0
km kembali.
3.1. Perancangan Perangkat Keras
3.1.1. Rangkaian Sensor Jarak
Rangkaian sensor jarak yang digunakan terdiri dari sensor photo reflector. Photo reflector dipasang pada bagian ban depan sepeda motor untuk mendeteksi jumlah putaran dari cakram rem depan dan mengubahnya menjadi pulsa-pulsa. Tiap putaran akan
menghasilkan satu pulsa yang kemudian akan dihitung oleh mikrokontroler. Konstruksi
sensor jarak disajikan pada Gambar 3.2 dan 3.3.
xiii
Gambar 3.2. Konstruksi Sensor Jarak Tampak Depan
Gambar 3.3. Konstruksi Sensor Jarak Tampak Samping
Sensor ini akan mendeteksi putaran roda dengan cara membaca perubahan warna
yang terdapat pada permukaan cakram. Untuk warna putih, output sensor akan berlogika 0
dan warna hitam akan berlogika 1.
Gambar rangkaian sensor jarak dapat dilihat pada Gambar 3.4.
Gambar 3.4. Rangkaian Sensor Photo Reflector
Photo reflector yang digunakan yaitu dengan arus maju sebesar 20 mA dan tegangan maju dioda sebesar 1,5 V. Dengan persamaan 2.3, maka besar R2 dapat dihitung:
175
20 5 , 1 5
1
mA V V R
xiv
Dalam perancangan digunakan nilai resistor sebesar 180Ω.
Supaya nilai arus I1 sebanding dengan intensitas cahaya yang diterima, maka nilai
minimum untuk R1 dapat diperoleh dengan persamaan 2.5. Dari datasheet, nilai VCE(sat)
dari QRB1114 adalah 0,4 volt. Dengan besar tegangan VCC yang dipakai sebesar 5 volt
dan arus I1 sebesar 20mA, maka nilai R1 minimum dapat diperoleh :
230 20 4 , 0 5 1 mA V V R
Dalam perancangan digunakan R1 sebesar 10kΩ.
3.1.2. Rangkaian Mikrokontroler AT89S52
Seluruh program untuk sistem kendali penentu waktu servis kendaraan bermotor ini
dikendalikan oleh mikrokontroler AT89S52.Rangkaian mikrokontroler AT89S52 disajikan
pada Gambar 3.5.
Gambar 3.5. Rangkaian Mikrokontroler AT89S52
Pada gambar 3.5 untuk rangkaian osilator menggunakan Kristal 12MHz dan dua
buah kapasitor 33pF sehingga besarnya periode untuk menjalankan satu instruksi ke
instruksi berikutnya dapat dihitung menggunakan persamaan 2.1.
Vcc Vcc U2 AT89S52 9 18 19 2 0 29 30 31 40 1 2 3 4 5 6 7 8 21 22 23 24 25 26 27 28 10 11 12 13 14 15 16 17 39 38 37 36 35 34 33 32 RST XTAL2 XTAL1 G N D PSEN ALE/PROG EA/VPP VCC P1.0/T2 P1.1/T2-EX P1.2 P1.3 P1.4/SS P1.5/MOSI P1.6/MISO P1.7/SCK P2.0/A8 P2.1/A9 P2.2/A10 P2.3/A11 P2.4/A12 P2.5/A13 P2.6/A14 P2.7/A15 P3.0/RXD P3.1/TXD P3.2/INTO P3.3/INT1 P3.4/TO P3.5/T1 P3.6/WR P3.7/RD P0.0/AD0 P0.1/AD1 P0.2/AD2 P0.3/AD3 P0.4/AD4 P0.5/AD5 P0.6/AD6 P0.7/AD7 Y 1 CRY STAL C1 C2 C3 SW1 tombol reset R1 R2
xv
= = = 1
Untuk mengembalikan kondisi kerja mikrokontroler pada posisi awal dibutuhkan
logika 1 pada pin RST. Bila besar R1 = 10K dan mikrokontroler AT89S52 mempunyai
logika 1 antara rentang tegangan 3V sampai dengan 5V maka besarnya R2 dapat dihitung
dengan menggunakan persamaan 2.2, yaitu:
1. Pada saat Vrst = 3V
3 = 10000
10000 + R x 5
R2 = 6,66 KΩ
2. Pada saat Vrst = 5V
5 = 10000
10000 + R x 5
R2 = 0 Ω
Maka pada perancangan dipilih nilai resistor R2 yang dekat dengan 0 dan dipilih
sebesar 20Ω.
Rangkaian reset dirancang agar reset terjadi pada saat sistem mendapatkan catu
daya pada pertama kali. Untuk membuat rangkaian reset, ada hal-hal yang harus
diperhatikan, yaitu :
1. Lebar pulsa untuk sinyal reset harus lebih besar dari 24 periode osilasi atau dua
siklus mesin. Dimana satu siklus mesin (t) = 1/fosc.
2. Rise time dari catu daya (Vcc) tidak lebih dari 1 milidetik. 3. Waktu start up dari osilator tidak lebih dari 10 milidetik
4. Tegangan reset yang diperlukan pada pin mikrokontroler adalah lebih dari 3,5
volt.
Dari ketentuan di atas, dengan menggunakan frekuensi osilator 12 MHz, maka
lebar pulsa reset minimum harus lebih besar dari :
= 10 + 24
= 10 + 24
12 × 10
= 10,002
xvi
Dengan tegangan reset minimum sebesar 3,5 volt, maka nilai resistor dan kapasitor
pada rangkaian reset dapat diperoleh dengan :
VRST = Vcc 1 − / ( . ) 3,5 = 5 1− , / ( . )
3,5 = 5−5. , / ( . )
5. , / ( . ) = 5−3
, / ( . ) = 0,3
, / ( . ) = ln ( 0,3)
−0,010002/ ( 1. 3) = -1,203972
1. 3 = 0,010002/1,203972
1. 3 = 8,307502.10
Dengan menggunakan R1 sebesar 10kΩ, maka pada perancangan besar nilai
kapasitor C3 sebesar 83 uF.
3.1.3. Rangkaian Tombol
Pengguna dapat memilih jarak servis dan tinggi ban kendaraan dengan cara
menekan tombol pilihan. Masing-masing menggunakan 2 buah tombol pilihan yaitu up dan down. Tombol pilihan ini akan menghitung cacahan dari setiap penekanan yang selanjutnya akan diproses di dalam mikrokontroler.
Ada 2 jenis tombol yang dapat digunakan pada mikrokontroler yaitu tombol dengan
logika aktif rendah dan logika aktif tinggi. Pada perancangan ini digunakan logika aktif
rendah. Rangkaian tombol dengan logika rendah disajikan pada Gambar 3.6.
Gambar 3.6. Rangkaian Tombol Logika Aktif Rendah
Kapasitor yang ada pada rangkaian digunakan untuk mengantisipasi terjadinya
bounching tegangan saat saklar push button ditekan atau dilepas. Sedangkan LED berfungsi sebagai indikator penanda cacahan setiap penekanan. Besar arus maksimum
untuk LED adalah sebesar 50mA, maka besar nilai resistor untuk Imax dapat dihitung
dengan persamaan 2.4 :
Vcc
C1
SW1 LED
R1
Vo
xvii max ) ( I V V
R S LED
mA R 50 ) 5 . 1 5 (
R = 70Ω
Dalam perancangan, besar arus yang akan digunakan adalah sebesar 10mA. Maka
besar nilai resistor yang digunakan adalah :
I V V
R ( S LED)
mA R 10 ) 5 . 1 5 (
R = 350Ω
Maka pada perancangan dipilih nilai resistor R2 sebesar 330Ω.
Banyaknya tombol pemilih mode ini ada dua macam yaitu tombol yang berfungsi
untuk memilih jarak servis dan memilih tinggi ban kendaraan.
Gambar rangkaian tombol pilihan jarak servis dan tinggi ban disajikan pada
Gambar 3.7 dan 3.8.
Gambar 3.7. Rangkaian Tombol Jarak Servis
Vcc R1 R2 LED LED SW1 up1 SW2 down1 C1
C2 port 1.1
port 1.0
xviii
Gambar 3.8. Rangkaian Tombol Tinggi Ban
3.1.4. Rangkaian LCD
LCD yang digunakan adalah LCD yang menggunakan chip kontroler Hitachi HD44780, yaitu M1632. LCD bertipe ini memungkinkan pemrogram untuk
mengoperasikan komunikasi data secara 8 bit atau 4 bit. Jika menggunakan jalur data 4 bit
akan ada 7 jalur data (3 untuk jalur kontrol dan 4 untuk jalur data). Jika menggunakan jalur
data 8 bit maka akan ada 11 jalur data (3 untuk jalur kontrol dan 8 untuk jalur data). Tiga
jalur kontrol ke LCD ini adalah EN (Enable), RS (Register Select) dan R/W (Read/Write). Interface LCD merupakan sebuah parallel bus, hal ini sangat memudahkan dan sangat cepat dalam pembacaan dan penulisan data dari atau ke LCD. Kode ASCII yang
ditampilkan sepanjang 8 bit dikirim ke LCD secara 4 atau 8 bit pada satu waktu. Jika mode
4 bit yang digunakan, maka 2 nibble data dikirim untuk membuat sepenuhnya 8 bit (pertama dikirim 4 bit MSB lalu 4 bit LSB dengan pulsa clock EN setiap nibblenya). Mengirim data secara paralel baik 4 atau 8 bit merupakan 2 mode operasi primer untuk
membuat sebuah aplikasi interface LCD. Penentuan mode operasi merupakan hal yang paling penting. Mode 8 bit sangat baik digunakan ketika kecepatan menjadi keutamaan
dalam sebuah aplikasi dan setidaknya minimal tersedia 11 pin I/O (3 pin untuk kontrol, 8
pin untuk data). Sedangkan mode 4 bit minimal hanya membutuhkan 7 bit (3 pin untuk
kontrol, 4 untuk data).
Berdasarkan datasheet tegangan kontras (Vlcd) maksimum sebesar 5V dan resistor
potensial RLCD ditentukan sebesar 10K hingga 20K. Sehingga dalam perancangan Vcc
R3
R4
LED
LED
SW3
up2
SW4
down2 C3
C4 port 1.3
port 1.2
xix
digunakan sebuah resistor variabel sebesar 10K yang berfungsi untuk membatasi tegangan
yang masuk ke pin Vlcd. Rangkaian LCD dengan mode 4 bit disajikan pada Gambar 3.9.
Gambar 3.9. Rangkaian LCD Mode 4 bit
3.1.5. Rangkaian Indikator LED
Rangkaian ini sering sekali digunakan untuk indikator sekaligus informasi awal
kepada pemakai. Hal ini memudahkan pemakai untuk mengetahui lebih dini apakah jarak
yang telah ditempuh kendaraan bermotor telah melampaui jarak servis atau belum.
Digunakan tiga buah LED dengan warna hijau, kuning dan merah dengan spesifikasi
penyalaan LED sebagai berikut :
a. LED berwarna hijau menyala jika jarak tempuh belum mencapai 0,9 dari jarak
servis yang ditentukan.
b. LED berwarna kuning menyala jika jarak tempuh telah mencapai 0,9 dari jarak
servis hingga mencapai jarak servis yang telah ditentukan.
c. LED berwarna merah menyala jika jarak tempuh telah melampaui jarak servis yang
telah ditentukan.
Rangkaian LED sederhana dapat dilihat pada Gambar 3.10.
Gambar 3.10. Rangkaian LED
Dengan arus yang diinginkan adalah 10mA, maka untuk menentukan nilai resistor
pada rangkaian dapat dihitung dengan persamaan 2.4 :
LED RESISTOR
port
xx 1. LED Berwarna Hijau
= − = 5−2,6
10 = 240Ω
2. LED Berwarna Kuning
= − = 5−2,4
10 = 260Ω
3. LED Berwarna Merah
= − = 5−1,95
10 = 305Ω
Dalam perancangan digunakan resistor sebesar 220Ω, 270Ω dan 330Ω
Gambar rangkaian indikator LED disajikan pada Gambar 3.11.
Gambar 3.11. Rangkaian Indikator LED
3.1.6. Rangkaian Regulator Tegangan
Perangkat ini digunakan untuk mencatu seluruh komponen yang ada di alat ini.
Perangkat ini harus terus beroperasi sehingga dibutuhkan sumber energi dari aki sepeda
motor. Regulator yang dibutuhkan adalah untuk menyesuaikan tegangan accu sepeda
motor 12 V dengan tegangan mikrokontroler, sensor dan LCD yang bekerja pada tegangan
5 volt. Rangkaian regulator dapat dilihat pada Gambar 3.12.
Gambar 3.12. Rangkaian Regulator Tegangan 5 V
R3
330 R2
270 R1
220
D3
LED Merah D2
LED Kuning D1
LED Hijau PORT 0.0
PORT 0.1
PORT 0.2
12V 5V
0 0
U2 L7805/TO3
1
3
2
VIN
G
N
D
VOUT
C1 C2
xxi
3.2. Perancangan Rangkaian Keseluruhan
Gambar 3.13 menggambarkan ilustrasi rangkaian keseluruhan dari penentu waktu
servis kendaraan bermotor. Tiap komponen dihubungkan dengan mikrokontroler
AT89S52 sebagai pengendali sistem. Sistem akan dikendalikan melalui program.
Gambar 3.13. Ilustrasi Rangkaian Keseluruhan dan Fungsi Tiap Port
3.3. Perancangan Perangkat Lunak
3.3.1. Program Utama
Program utama berisi gambaran umum tentang bagaimana cara kerja dari penentu
waktu servis kendaraan bermotor ini bekerja. Program dimulai dengan penginisialisasian
dari port-port, register dan variabel yang digunakan. Untuk jarak tempuh dan jarak servis
dinyatakan dalam satuan kilometer dan tinggi ban dalam centimeter. Setelah inisialisasi,
dilanjutkan dengan pembacaan masukan yang diinterupsikan dari tombol pilihan sehingga
didapatkan jarak servis dan tinggi ban.
Vcc Vcc Vcc 0 12V GND Vcc U2 AT89S52 9 18 19 2 0 29 30 31 40 1 2 3 4 5 6 7 8 21 22 23 24 25 26 27 28 10 11 12 13 14 15 16 17 39 38 37 36 35 34 33 32 RST XTAL2 XTAL1 GN D PSEN ALE/PROG EA/VPP VCC P1.0/T2 P1.1/T2-EX P1.2 P1.3 P1.4/SS P1.5/MOSI P1.6/MISO P1.7/SCK P2.0/A8 P2.1/A9 P2.2/A10 P2.3/A11 P2.4/A12 P2.5/A13 P2.6/A14 P2.7/A15 P3.0/RXD P3.1/TXD P3.2/INTO P3.3/INT1 P3.4/TO P3.5/T1 P3.6/WR P3.7/RD P0.0/AD0 P0.1/AD1 P0.2/AD2 P0.3/AD3 P0.4/AD4 P0.5/AD5 P0.6/AD6 P0.7/AD7 D2 LED Kuning LED C3 C5 C6 Y 1 CRY STAL LED LED D7 LED R14 RESISTOR C1 C2 R13 POT 1 3 2 D8 LED D9 LED R3 RESISTOR R2 RESISTOR R1 RESISTOR R4 RESISTOR R5 RESISTOR R6 RESISTOR R7 RESISTOR SW1 up1 R8 RESISTOR R10 RESISTOR R9 RESISTOR SW2 down1 D3 LED Merah R11 RESISTOR SW3 up2 A1 QRB1114 3 4 1 2 SW4 down2 LED SW7 serv is SW5 reset SW6 start C4 R12 RESISTOR C7 CAP NP C8 CAP NP C9 CAP NP J4 LCD 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 U2 L7805/TO3 1 3 2 VIN GN D VOUT C1 C2
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
xxii
Kemudian mikrokontroler akan menunggu interupsi tombol start untuk mulai menjalankan proses selanjutnya. Proses selanjutnya yaitu mikrokontroler akan menghitung
keliling dari roda sepeda motor yang digunakan. Dari informasi tinggi ban yang ditentukan
oleh pengguna dan dengan diameter velg roda 14 inchi (35,56cm), maka keliling roda
dihitung menggunakan persamaan berikut :
k = 3,14 x ((2 x d) + 35,56cm)
dengan :
d = tinggi ban (cm)
Setelah menghitung keliling roda, kemudian mikrokontroler akan mengirimkan
sinyal ke sensor photo reflector supaya sensor mulai bekerja dan menghitung jumlah putaran yang dibaca untuk nantinya diolah menjadi jarak tempuh.
Jumlah putaran roda akan bertambah tiap ada putaran dari cakram roda dan
dideteksi oleh sensor photo reflector. Tiap putaran cakram akan menghasilkan satu buah sinyal, dan sinyal tersebut akan diakumulasikan dan nantinya akan dikonversikan menjadi
jarak tempuh. Pada program, perhitungan jarak yang telah ditempuh dihitung dengan
persamaan :
km = km + k
a = km / 100000
dengan :
a = jarak yang telah ditempuh atau jarak tempuh (km)
km = jarak tempuh (cm)
k = keliling roda (cm)
Dalam display LCD, jarak tempuh ditampilkan dalam satuan kilometer. Karena
keliling roda dalam satuan centimeter, maka harus dibagi 100000 supaya menjadi satuan
kilometer. Secara umum diagram alir program utama dari penentu waktu servis kendaraan
bermotor dapat dilihat pada Gambar 3.14.
xxiii
Gambar 3.14. Diagram Alir Program Utama
xxiv
3.3.2.
Sub Rutin Tombol Pilihan
Untuk diagram alir subrutin tombol pilihan dapat dilihat pada Gambar 3.15 yang
terdiri dari dua pilihan untuk jarak servis dan tinggi ban. Masing-masing tombol pilihan
terdiri buah tombol naik (up) dan turun (down) yang merupakan masukan dari mikrokontroler.
Kondisi awal untuk tombol pilihan jarak servis yaitu bernilai 2000 kilometer dan
akan mencacah naik jika tombol up ditekan dan akan mencacah turun jika tombol down ditekan. Jarak servis maksimum ditentukan sebesar 10000 kilometer. Hal ini dilakukan
agar alat ini masih dapat digunakan dalam beberapa tahun ke depan sejalan dengan
perkembangan jenis pelumas yang semakin maju dan berkembang. Jarak servis minimum
ditentukan sebesar 2000 karena jarak servis minimum yang disarankan untuk saat ini
adalah sebesar 2000 kilometer. Cacahan naik dan turun ditentukan sebesar 500 kilometer.
Hal ini dikarenakan jarak servis yang umum digunakan dalam rentang kenaikan antara
ratusan kilometer hingga ribuan kilometer[8][9].
Untuk kondisi awal dari dari tombol pilihan tinggi ban minimum sebesar 2
centimeter dan tinggi maksimum adalah sebesar 10 centimeter. Untuk cacahan naik dan
turun ditentukan sebesar 1 centimeter.
Gambar 3.15. Diagram Alir Subrutin Tombol Pilihan
xxv
Gambar 3.15.(Lanjutan) Diagram Alir Subrutin Tombol Pilihan
3.3.3. Subrutin Indikator LED dan Teks Peringatan
Diagram alir subrutin indikator LED digunakan untuk menentukan warna LED
yang menyala pada saat alat ini mulai bekerja.Jumlah LED yang digunakan yaitu tiga buah
yaitu hijau, kuning dan merah.
Untuk teks peringatan LCD juga terdiri dari tiga macam. Masing masing teks
peringatan akan berubah sesuai dengan warna LED yang menyala.
Spesifikasi penyalaan ketiga LED dan teks peringatan LCD tersebut yaitu :
1. Warna hijau menyala, warna kuning dan merah mati
Keadaan ini terjadi jika jarak tempuh bernilai awal nol hingga 90% dari
jarak servis. Diambil nilai 90% karena sebagai persiapan untuk mencapai jarak
servis sehingga perawatan dapat dilakukan sebelum mencapai nilai jarak servis
yang ditentukan.
Pada keadaan ini teks peringatan pada layar LCD bertuliskan “Mesin Anda
OK”.
2. Warna kuning menyala, warna hijau dan merah mati
Keadaan jika jarak tempuh telah mencapai 90% hingga 100% dari jarak
servis. Keadaan ini sebagai jeda yang dianjurkan supaya melakukan perawatan.
Pada keadaan ini teks peringatan pada layar LCD bertuliskan “Waktunya
Servis”.
xxvi
3. Warna merah menyala, warna hijau dan kuning mati
Keadaan ini jika jarak tempuh telah melebihi 100% jarak servis. Jarak
tempuh telah melampaui jarak servis.
Pada keadaan ini teks peringatan pada layar LCD bertuliskan “Mesin Anda
Gawat”.
Gambar diagram alir subrutin indikator LED dapat dilihat pada Gambar 3.16.
Gambar 3.16. Diagram Alir Subrutin Indikator LED dan Teks Peringatan
xxvii
BAB IV
HASIL DAN PEMBAHASAN
Untuk mengetahui suatu alat atau program dapat bekerja dengan baik atau tidak
diperlukan pengujian terhadap kinerja alat atau program yang telah dirancang. Pengujian
dilakukan terhadap sistem secara keseluruhan dan pada setiap blok. Pengujian berupa
pengukuran terhadap perangkat dan respon yang dihasilkan. Pengujian yang dilakukan
meliputi pengujian rangkaian sensor jarak, tampilan layar LCD, rangkaian tombol, LED
indikator, pengujian daya alat, perbandingan pengukuran alat dengan odometer, dan
analisis perangkat lunak.
4.1. Implementasi Penentu Waktu Servis Kendaraan Bermotor
Hasil implementasi alat Penentu Waktu Servis Kendaraan Bermotor yang telah
dirancang dapat dilihat pada Gambar 4.1.
a) b)
Gambar 4.1. Implementasi Penentu Waktu Servis Kendaraan Bermotor. a) Rangkaian
Keseluruhan. b) Tampak Luar.
xxviii
Mikrokontroler yang digunakan sebagai otak dari perangkat ini adalah AT89S52.
Mikrokontroler akan mengatur tampilan-tampilan yang muncul pada layar LCD dan LED
indikator berdasarkan masukan yang dikirim melalui penekanan tombol dan sensor.
Konstruksi tampilan LCD dan LED indikator dapat dilihat pada Gambar 4.2. Sensor photo reflector diletakkan pada cakram rem depan yang terdapat pada kendaraan bermotor. Konstruksi sensor photo reflector dapat dilihat pada Gambar 4.3. Masukan tombol terdiri dari enam buah tombol yang masing-masing fungsi tombol dijabarkan sebagai berikut :
1. Tombol Up Tinggi Ban : tombol untuk menaikkan nilai tinggi ban. 2. Tombol Down Tinggi Ban : tombol untuk menurunkan nilai tinggi ban. 3. Tombol Up Jarak Servis : tombol untuk menaikkan nilai jarak servis. 4. Tombol Down Jarak Servis : tombol untuk menurunkan nilai jarak servis. 5. Tombol Start : tombol untuk mengaktifkan alat supaya mulai bekerja.
6. Tombol Servis : tombol yang digunakan saat kendaraan mendapatkan
perawatan atau servis.
Konstruksi tombol masukan dapat dilihat pada Gambar 4.4.
Gambar 4.2.Konstruksi Tampilan LCD dan LED Indikator.
Gambar 4.3. Konstruksi Peletakan Sensor Photo Reflector
xxix
Gambar 4.4. Konstruksi Tombol Masukan
4.2. Pengujian Perangkat Keras
Untuk mengetahui kinerja dari beberapa perangkat keras yang telah dirancang,
maka pengujian dilakukan terhadap masing-masing rangkaian. Pengujian yang akan
dilakukan adalah :
1. Hasil Pengujian Sistem Keseluruhan
2. Pengujian LED Indikator dan Teks Peringatan
3. Pengujian Rangkaian Sensor Jarak
4. Pengujian LCD
5. Pengujian Tombol
6. Pengujian Daya Alat
4.2.1. Hasil Pengujian Sistem Keseluruhan
Data hasil pengujian keseluruhan diperoleh dengan cara menguji beberapa kondisi
alat penentu waktu servis kendaraan, adapun kondisi-kondisi tersebut yaitu :
1. Kondisi awal ketika pertama kali dinyalakan
Pada kondisi ini alat akan menampilkan teks melalui layar LCD, yaitu “Tinggi Ban
= 2cm” dan “Jarak Servis = 2000km” pada baris pertama dan kedua. Pengguna
memasukkan nilai tinggi ban pada kendaraan dan jarak servis yang diinginkan
dengan menekan tombol up atau down yang telah tersedia. Tinggi ban memiliki nilai minimum 2 centimeter dan maksimum 10 centimeter. Untuk jarak servis
memiliki nilai minimum 2000 kilometer dan maksimum 10000 kilometer. Jika
xxx
pengaturan telah selesai maka tombol start harus ditekan untuk mulai mengaktifkan alat ini. Hasil pengujian ini dapat dilihat pada Gambar 4.5.
Gambar 4.5. Kondisi Alat Saat Pertama Dihidupkan
2. Kondisi Setelah Tombol Start Ditekan
Kondisi ini alat siap bekerja dan menghitung jarak yang ditempuh oleh kendaraan.
Tampilan pada LCD pada baris pertama dan kedua akan berubah. Pada baris
pertama berubah menjadi “Jrk Tmph = 0km” dan baris kedua menjadi “Mesin Anda
OK”. Baris kedua mempunyai tiga buah macam tampilan teks, yaitu
a. “Mesin Anda OK”
Teks ini muncul jika jarak tempuh belum mencapai 90% dari jarak servis yang
telah ditentukan. Kondisi ini dapat dilihat pada Gambar 4.6.
Gambar 4.6. Kondisi “Mesin Anda OK”
b. “Waktunya Servis”
Teks ini muncul jika jarak tempuh antara 90% jarak servis hingga mencapai
jarak servis yang telah ditentukan. Kondisi ini dapat dilihat pada Gambar 4.7.
xxxi
Gambar 4.7. Kondisi “Waktunya Servis”
c. “Mesin Anda Gawat”
Teks ini muncul jika jarak tempuh telah melampaui jarak servis yang telah
ditentukan. Kondisi ini dapat dilihat pada Gambar 4.8.
Gambar 4.8. Kondisi “Mesin Anda Gawat”
3. Kondisi Setelah Kendaraan Diservis
Jika kendaraan telah diservis, maka kondisi alat harus dikembalikan pada kondisi
awal dengan cara menekan tombol servis yang telah disediakan. Setelah tombol
servis ditekan, maka tampilan pada LCD akan kembali seperti semula sama seperti
saat dihidupkan pertama kali atau sama dengan kondisi nomor satu.
4. Kondisi Layar LCD Sesuai Kontak Kendaraan
Kondisi ini yaitu pada saat kita memakai kendaraan atau tidak yang ditandai
dengan mengatur kondisi kunci kontak kendaraan. Dalam hal ini tampilan LCD
akan tampil sesuai dengan kondisi kunci kontak. Terdapat dua kondisi kunci
xxxii
kontak, yaitu kondisi on dan off. Kondisi layar LCD saat kunci on ataupun off dapat dilihat pada Gambar 4.9 dan Gambar 4.10.
Gambar 4.9. Kondisi LCD Saat Kontak On
Gambar 4.10. Kondisi LCD Saat Kontak Off
4.2.2. Pengujian LED Indikator dan Teks Peringatan
LED indikator dan teks peringatan digunakan sebagai penanda kondisi kendaraan
bermotor pada saat tersebut. LED indikator dan teks peringatan mewakili tiga kondisi
kendaraan bermotor yang berbeda, yaitu :
a. Kondisi Aman : LED indikator berwarna hijau menyala. Kondisi terjadi jika jarak
tempuh kurang atau sama dengan 90% dari jarak servis. Teks peringatan
menampilkan “Mesin Anda OK”.
b. Kondisi Saatnya Servis : LED indikator berwarna kuning menyala. Kondisi terjadi
jika jarak tempuh lebih dari 90% dan kurang dari jarak servis. Teks peringatan
menampilkan “Waktunya Servis”.
c. Kondisi Gawat : LED indikator berwarna merah menyala. Kondisi terjadi jika jarak
tempuh telah melebihi jarak servis. Teks peringatan menampilkan “Mesin Anda
Gawat”.
xxxiii
Pengujian yang dilakukan ini tidak sesuai dengan perancangan sesungguhnya yang
menggunakan jarak tempuh sejauh 2000 km tetapi hanya menggunakan jarak tempuh
sejauh 10 km. Jarak tempuh dipilih sebesar 10 km dengan alasan bahwa pengujian ini
hanya bertujuan untuk mengetahui serta mengecek kinerja LED indikator dan teks
peringatan apakah telah sesuai dengan perancangan yang menggunakan toleransi jarak
sebesar 10%.
Dengan jarak servis sejauh 10 km, maka jarak aman 90% dari jarak servis yaitu sebesar
9 km. Pengujian dapat dilihat pada Tabel 4.1.
Tabel 4.1. Pengujian LED Indikator dan Teks Peringatan
No Jarak Tempuh
LED Indikator Teks Peringatan
Keterangan Hijau Kuning Merah
1 0 km On Off Off Mesin Anda OK - 2 1 km On Off Off Mesin Anda OK - 3 5 km On Off Off Mesin Anda OK - 4 6 km On Off Off Mesin Anda OK - 5 7 km On Off Off Mesin Anda OK - 6 8 km On Off Off Mesin Anda OK -
7 9 km Off On Off Waktunya Servis Nyala LED berubah 8 10 km Off On Off Waktunya Servis -
9 11 km Off Off On Mesin Anda Gawat Nyala LED berubah 10 12 km Off Off On Mesin Anda Gawat -
Jarak tempuh yang digunakan merupakan jarak tempuh yang tercatat pada alat.
Urutan penyalaan LED indikator yaitu mulai dari hijau, kuning kemudian merah. Pada
keadaan awal (jarak te
![Gambar konstruksi LCD [9] disajikan pada Gambar 2.3.](https://thumb-ap.123doks.com/thumbv2/123dok/1696478.2079009/22.595.18.572.181.727/gambar-konstruksi-lcd-disajikan-pada-gambar.webp)
![Tabel 2.4. Jenis dan Fungsi Zat Aditif [11]](https://thumb-ap.123doks.com/thumbv2/123dok/1696478.2079009/30.595.29.551.98.774/tabel-jenis-fungsi-zat-aditif.webp)