3.1 Waktu dan Tempat Penelitian
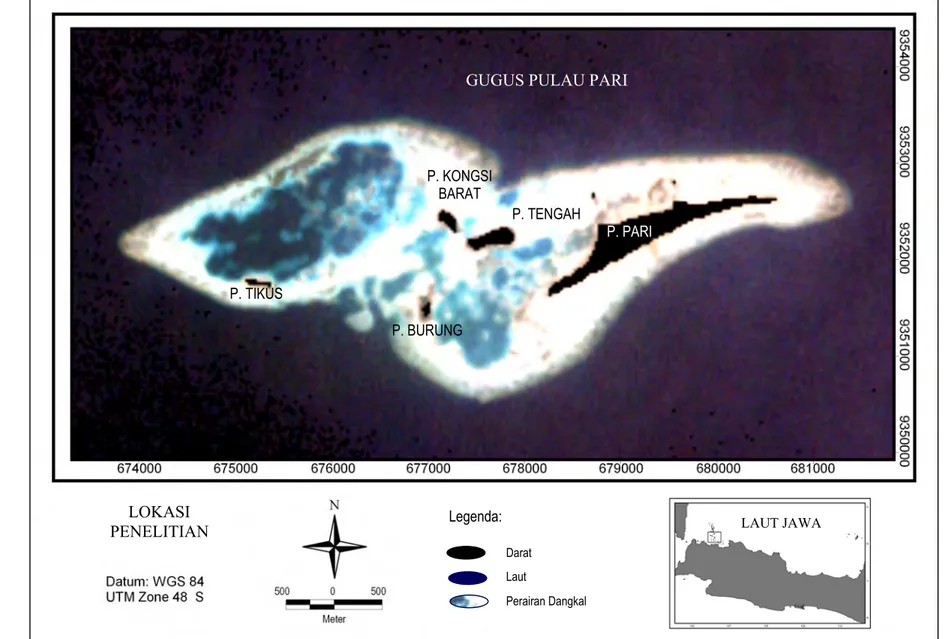
Penelitian ini dilaksanakan mulai bulan Juni 2004 sampai bulan Desember 2006. Lokasi yang dipilih untuk studi kasus adalah Gugus Pulau Pari, Kepulauan Seribu, Jakarta. Lokasi penelitian ditampilkan pada Gambar 5. Pemrosesan data satelit dilakukan di Laboratorium Penginderaan Jauh dan Sistem Informasi Geografis (SIG) Kelautan, Departemen Ilmu dan Teknologi Kelautan, Fakultas Perikanan dan Ilmu Kelautan, IPB, Bogor.
3.2 Alat dan Bahan 3.2.1 Alat
Peralatan lapang yang diperlukan yaitu Global Positioning System (GPS) Sounder untuk menentukan kedalaman air laut di Gugus Pulau Pari, kapal bermotor untuk transportasi pengambilan data lapangan dan papan skala untuk mengukur pasang surut.
Alat untuk pengolahan data citra yaitu sebuah personal komputer yang dilengkapi dengan perangkat lunak ER Mapper 6.1 untuk mengolah data citra Landsat-7 ETM+, Arc View 3.3 untuk layout peta, MINITAB 13.3 dan Microsoft excel untuk mengolah data statistik.
3.2.2 Bahan
Bahan yang digunakan meliputi data digital citra Landsat-7 ETM+, Peta batimetri skala 1:50.000, Peta Rupa Bumi 1:25.000, data pasang surut pada saat peliputan citra dan saat pengambilan data kedalaman lapang dengan GPS Sounder di Gugus Pulau Pari Kepulauan Seribu.
Gambar 5 Lokasi penelitian. P. PARI P. TENGAH P. KONGSI BARAT P. BURUNG P. TIKUS
GUGUS PULAU PARI
LOKASI PENELITIAN
Darat Laut
Perairan Dangkal
3.3 Pengumpulan dan Pengolahan Data Lapangan
Data lapangan diambil pada tanggal 25-28 Juli 2004. Data yang diambil yaitu posisi koordinat dan kedalaman air serta pasang surut.
3.3.1 Pengukuran kedalaman
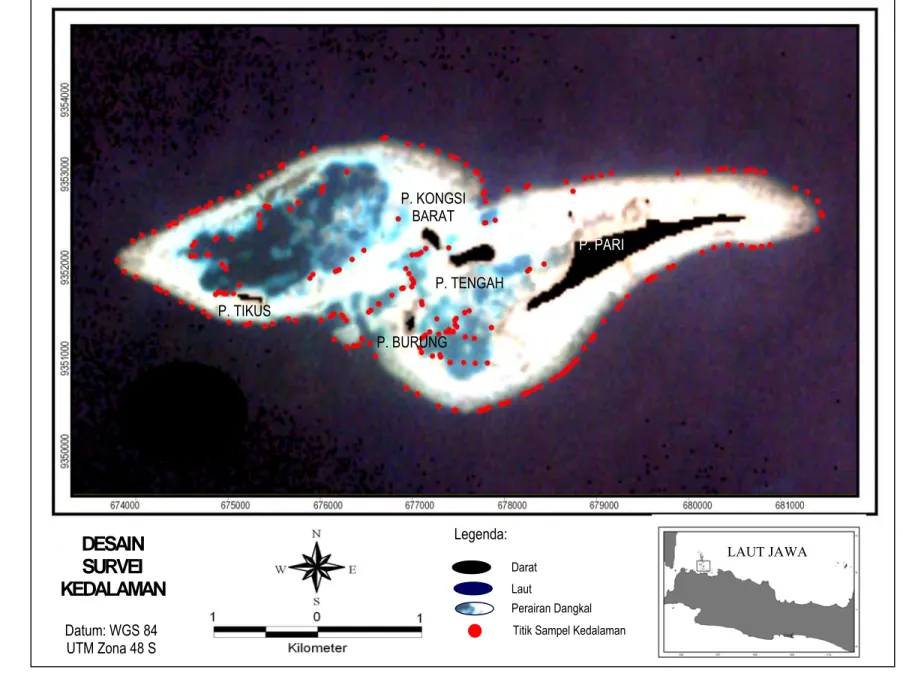
Desain survei dibuat sebelum survei dilakukan agar penelitian dilakukan secara baik dan sempurna sesuai rencana sehingga data yang diperoleh valid dan sesuai dengan tujuan penelitian. Desain survei terlihat pada Gambar 6. Pengambilan data kedalaman dan posisi dengan GPS sounder sesuai dengan desain tersebut.
Pengambilan data kedalaman lapang dilakukan antara pukul 08.00-11.30 WIB dan pukul 13.30-17.00 WIB. Pengambilan data kedalaman lapang dihentikan sekitar pukul 11.30-13.30 WIB karena pada waktu tersebut air laut surut sehingga banyak karang yang bermunculan yang bisa membahayakan kapal. Metode survei yang direncanakan adalah metode paralel tetapi karena lokasi penelitian yang tidak memungkinkan yaitu adanya karang-karang yang muncul ke permukaan air dan banyaknya rumput laut yang dibudidayakan maka pengambilan sampel kedalaman air dilakukan pada bagian luar tubir dan di dalam tubir (pada jalur perahu yang biasa digunakan oleh penduduk setempat dan atau petani rumput laut).
3.3.2 Pengukuran pasang surut
Pasang surut diukur dengan menggunakan papan yang diberi skala. Pasang surut diukur selama 2x24 jam, tiap 15 menit. Data pasung surut yang diperoleh digunakan untuk mengkalibrasi kedalaman dengan pengukuran GPS sounder.
3.3.3 Koreksi pasang surut
Pengambilan data lapang dilakukan pada waktu yang berbeda dengan waktu perekaman citra sehingga memungkinkan kedalaman yang berbeda. Sehingga data kedalaman lapang perlu dilakukan kalibrasi dengan data kedalaman laut pada saat perekaman citra. Kalibrasi ini perlu dilakukan dengan alasan kondisi tinggi muka air laut dan kedalaman laut bersifat tidak statis dan mengalami perubahan karena adanya pasang surut air laut. Proses kalibrasi ini memerlukan data pasang surut pada waktu pengambilan data kedalaman lapang, prediksi pasang surut pada waktu kedalaman lapang dan data prediksi pasang surut pada waktu perekaman citra. Pada wilayah penelitian tidak terdapat
data pasang surut sehingga digunakan data pasang surut dari stasiun terdekat yaitu stasiun Tanjung Priuk.
Proses kalibrasi data kedalaman lapang terhadap kedalaman laut pada citra dilakukan dengan menggunakan logika langkah-langkah sebagai berikut:
1) Data kedalaman laut pada seluruh sampel tidak dapat diukur pada waktu yang bersamaan pada seluruh tempat karena beberapa keterbatasan. Sehingga data kedalaman lapang harus dikalibrasi pada jam 10.00 WIB agar data kedalaman laut tersebut seolah-olah diukur pada waktu yang sama dengan jam perekaman citra. 2) Secara logika, pasang surut di Pulau Pari dan Tanjung Priuk memiliki beda fase. Data
pasang surut lapang dan data prediksi pasang surut pada saat pengambilan data lapang dianalisa untuk menentukan beda fase antara keduanya. Beda fase digunakan untuk kalibrasi pada data pasang surut saat perekaman citra.
3) Data kedalaman lapang dan data citra perlu disamakan. Maka data kedalaman lapang yang telah dikalibrasi terhadap data pasang surut jam 10 WIB, dilakukan kalibrasi kedua terhadap data pasang surut saat perekaman citra. Dengan demikiaan data kedalaman lapang diharapkan sama dengan informasi kedalaman laut yang terekam pada citra.
Koreksi pasang surut diperlukan untuk melakukan koreksi kedalaman yang dihasilkan dari survei lapang. Perbedaan tersebut disebabkan adanya pasang naik dan pasang surut muka air laut. Teknik penyesuaian data kedalaman antara waktu perekaman citra dengan waktu pengambilan data lapangan dilakukan dengan menghitung selisih kedalaman antara kedua data.
Dengan asumsi waktu perekaman citra dilakukan pada jam 10.00 (waktu setempat). Mengurangi data kedalaman di atas jam 10.00 (waktu setempat) dengan selisih antara nilai kedalaman saat itu dengan nilai kedalaman pada jam 10.00. Persamaan yang digunakan untuk penentuan angka kedalaman (Berlianto 1998) adalah:
∆Z=(∆T/60 * Z1) + Z2 (8) Keterangan:
∆T: Besarnya selisih waktu (dalam menit) saat satelit melintas (pukul 10.00) dengan waktu pengambilan data lapangan
Z1: Beda kedalaman antar jam saat pengambilan data lapangan dengan jam berikutnya Z2: Perbedaan kedalaman lapang dengan kedalaman pada pukul 10.00
Gambar 6 Desain survei kedalaman. P. TENGAH P. KONGSI BARAT P. TIKUS P. PARI
DESAIN
SURVEI
KEDALAMAN
Laut Legenda: Darat Perairan Dangkal Titik Sampel KedalamanLAUT JAWA
Datum: WGS 84 UTM Zona 48 S
3.4 Pengolahan Data Penginderaan Jauh 3.4.1 Koreksi radiometrik
Kesalahan yang berkaitan dengan proses perekaman dapat dikelompokkan menjadi kesalahan sistematis dan nonsistematis. Penyebab kesalahan sistematis telah diperhitungkan sebelumnya seperti pengaruh sudut panjang sensor. Kesalahan nonsistematis disebabkan faktor-faktor yang tidak diketahui dengan pasti seperti pengaruh atmosfer.
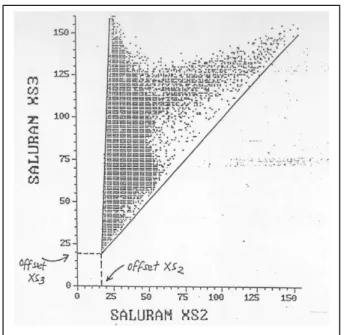
Ada beberapa metode untuk koreksi radiometrik yang digunakan untuk mengeliminasi kesalahan nonsistematik. Metode feature space yaitu metode yang memanfaatkan gambaran hasil pemplotan piksel-piksel pada band hijau melawan inframerah dekat dan band merah melawan inframerah dekat (Danoedoro 1996). Hasil pemplotan keseluruhan piksel akan memberikan kenampakan imajiner berupa garis vegetasi dan garis tanah (Gambar 7). Pertemuan dua garis ini diasumsikan harus bertemu di titik asal (0,0), yaitu untuk obyek air jernih, tenang dan dalam atau obyek bayangan lereng yang sangat curam. Apabila titik pertemuan ini tidak pada koordinat (0,0), maka offset pada kedua saluran dapat dihitung. Melalui cara ini akan didapatkan dua macam nilai offset untuk saluran inframerah dekat, sehingga masih perlu dirata-ratakan. Nilai offset inilah yang digunakan untuk koreksi setiap band yang akan digunakan.
Sumber: Danoedoro (1996)
Metode yang dapat digunakan untuk koreksi radiometrik adalah metode penyesuaian histogram (Jensen 1986). Metode ini didasarkan atas asumsi bahwa data pada panjang gelombang yang lebih besar cenderung lebih kecil pengaruh atmosfernya. Jika nilai minimum dari histogram seluruh piksel lebih besar dari nol, maka nilai minimum pada histogram dianggap sebagai pengaruh atmosfer. Pengaruh atmosfer dapat dikalibrasi dengan melakukan transformasi kepada citra dengan formula sebagai berikut:
DNt = DNa – B (9)
Keterangan:
DNt : Nilai digital data suatu piksel yang telah dikoreksi DNa : Nilai digital data suatu piksel yang belum dikoreksi B : Nilai minimum digital data yang diperoleh dari histogram Penelitian ini menggunakan metode penyesuaian histogram.
3.4.2 Koreksi geometrik
Koreksi geometrik dilakukan untuk mendapatkan citra yang sesuai dengan posisi yang sebenarnya di bumi. Koreksi ini dilakukan dengan acuan Peta Rupabumi Indonesia skala 1:25.000.
Tahapan yang dilakukan dalam koreksi geometrik adalah: 1. Pemilihan titik kontrol lapangan (Ground Control Point/GCP)
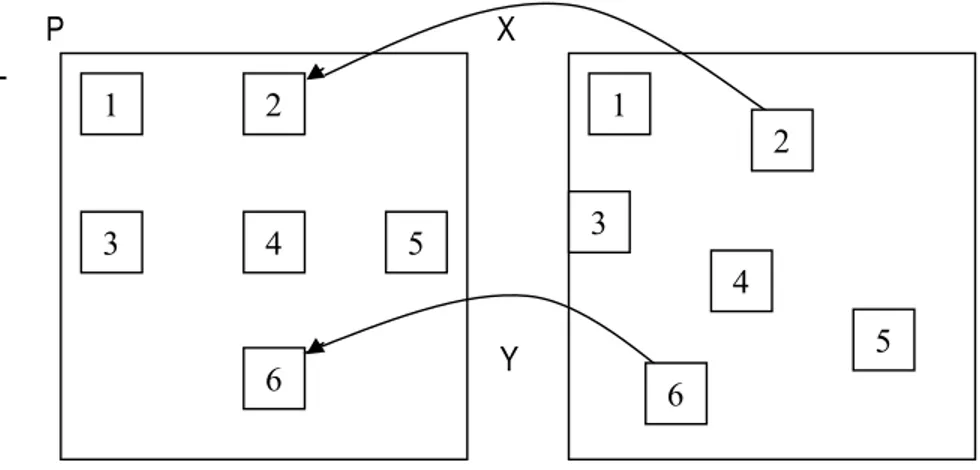
2. Penghitungan persamaan transformasi. Pada Gambar 8 disajikan ilustrasi dari teknik pengambilan GCP.
3. Interpolasi intensitas nilai digital mencakup ekstraksi nilai kecerahan nilai digital dari lokasi estimasi (p’ dan l’) pada citra asli yang kemudian mengisikannya pada koordinat x dan y. Pengisian pixel pada keluaran citra dapat dilakukan dengan 3 cara, yaitu: nearest neighbor interpolation, bilinear interpolation atau cubic convolution interpolation, sedangkan pada penelitian ini menggunakan metode nearest neighbor interpolation.
(10) P X
L Y
Y
Data reference Data yang belum terkoreksi Persamaan transformasi:
P = f(X,Y), L = g(X,Y) Sumber: Jaya (1996)
Gambar 8 Ilustrasi teknik pemilihan GCP.
4. Penghitungan root mean square error (RMSE). Setelah GCP terpilih dan persamaan polinomial diperoleh, selanjutnya dihitung akar kesalahan rata-rata kuadrat. Dianjurkan RMSE lebih kecil dari 0,5 pixel. RMSE dapat dinyatakan dengan rumus:
Keterangan:
p, l : koordinat asli dari GCP pada citra p’, l’ : koordinat estimasi
Akhir dari proses ini akan dihasilkan citra Landsat-7 ETM+ yang sudah terkoreksi.
3.4.3 Pembatasan wilayah penelitian (image cropping)
Citra Landsat-7 ETM+ full scene mempunyai ukuran 185x185 km. Proses pemotongan citra hanya dipilih pada lokasi penelitian yang diperlukan saja yaitu perairan Gugus Pulau Pari.
1 4 3 5 2 1 5 4 3 6 6 2
(
') ( )
2 ' 2 RMSE= p−p + l−l3.4.4 Pemisahan obyek laut dan bukan laut (image masking)
Langkah ini bertujuan untuk menghilangkan obyek bukan kajian. Fokus kajian adalah di perairan Gugus Pulau Pari sehingga obyek laut dan bukan laut perlu dibedakan. Pembedaan dilakukan dengan masking citra yaitu memberikan nilai nol untuk obyek bukan laut. Tahapan ini diperlukan agar obyek bukan laut tidak memberikan kontribusi dalam analisis data pada tahap selanjutnya. Pemisahan obyek dilakukan dengan cara memberikan nilai nol untuk obyek bukan laut.
Formula yang digunakan untuk memisahkan obyek laut dan bukan laut adalah: if (i1/i2<1) then i3 else null untuk band 1, band 3, band 4 dan band 7 if (i1/i2<1) then i1 else null untuk band 5
if (i1/i2<1) then i2 else null untuk band 2
keterangan:
i1 adalah input 1 (nilai digital band 5) i2 adalah input 2 (nilai digital band 2)
i3 adalah input 3 (nilai digital band 1, band 3, band 4 dan band 7)
3.4.5 Transformasi citra
Transformasi yang digunakan yaitu:
1) Transformasi dengan model terbaik yang dihasilkan dari nilai digital band asli (selengkapnya diuraikan pada sub bab 3.5 tentang pengolahan model nilai digital asli) 2) Transformasi dengan algoritma Van Hengel dan Spitzer (selengkapnya diuraikan pada
sub bab 3.6 tentang pengolahan algoritma Van Hengel dan Spitzer)
3.4.6 Klasifikasi citra
Klasifikasi citra bertujuan untuk mengelompokkan nilai kedalaman air agar mempunyai pola sebaran nilai kedalaman yang semakin jelas. Nilai-nilai hasil transformasi kedalaman dikelompokkan menjadi kelas-kelas yang sama. Metode klasifikasi yang digunakan yaitu klasifikasi tak terselia (unsupervised classification). Metode ini mendasarkan pada pendapat Lyzenga (1978; 1985) yang mengatakan bahwa kedalaman perairan merupakan fungsi linear yang ditunjukkan oleh nilai nilai digital citra. Semakin dalam suatu perairan mempunyai warna yang lebih rendah.
3.5 Pengolahan Model Nilai Digital Asli
Data yang dianalisis dari citra Landsat-7 ETM+ merupakan nilai digital masing-masing pixel pada masing-masing-masing-masing band. Pengambilan nilai digital berdasarkan kesamaan posisi dari titik kedalaman sesuai desain survei.
3.5.1 Analisis korelasi
Penggunaan analisa korelasi bertujuan untuk menentukan besarnya hubungan antara data kedalaman dan nilai digital pada masing-masing band.
Analisa korelasi untuk variabel bebas (x) yaitu nilai digital pada masing-masing band dan variabel terikat (y) yaitu nilai kedalaman adalah sebagai berikut (Walpole 1995) :
(11)
Keterangan:
r : koefisien korelasi n : jumlah data
x : nilai digital masing-masing band y : nilai kedalaman lapang
3.5.2 Analisis komponen utama
Penggunaan analisa komponen utama (Principal Componen Analysis=PCA) adalah untuk menyederhanakan tujuh saluran Landsat-7 ETM+ menjadi 3 saluran dengan membuat sumbu koordinat baru pada tampilan diagram pencar menggunakan analisa statistik. Nilai kecerahan baru yang akan dihasilkan secara sederhana dirumuskan oleh Jensen (1986) sebagai berikut:
New DN i,j,p = Total (k=1-n) akp DN i,j,k ( 12) Keterangan:
akp : faktor muatan (eigen factor)
DN i,j,k : nilai kecerahan pada saluran k, baris i, kolom j N : jumlah saluran
3.5.3 Penyusunan model penduga kedalaman dengan nilai respon spektral data Landsat-7 ETM+
Untuk mendapatkan model hubungan data kedalaman dengan nilai respon spektral data Landsat-7 ETM+ yang terbaik, maka dilakukan analisa regresi. Analisa
(
) (
)(
)
(
)
(
)
[
∑
2∑
2]
[
(
∑
2)
(
∑
)
2]
∑
∑
∑
− − − = i i i i i i i i y y n x x n y x y x n r⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ 3 2 1 ) cos( ) sin( ) sin( ) sin( ) cos( 0 ) cos( ) sin( ) sin( ) cos( ) sin( ) cos( ) cos( 3 2 1 X X X x s s r s r r r s s r s r Y Y Y
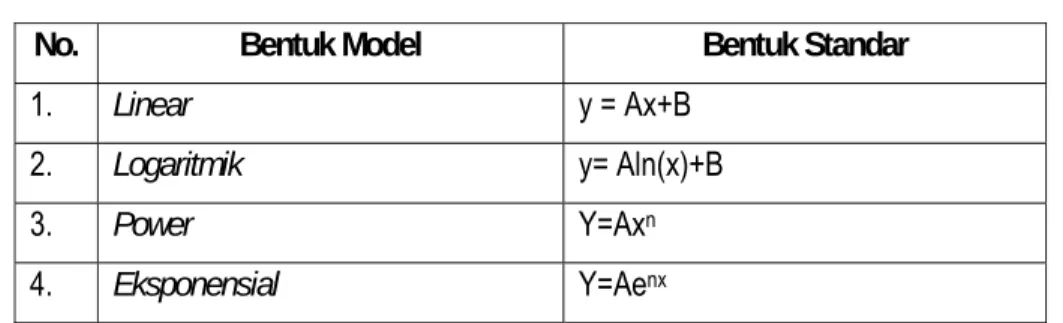
regresi digunakan untuk menentukan besarnya pengaruh setiap perubahan yang dilakukan terhadap koefisien atau variabel nilai dari masing-masing operasi penajaman yang dilakukan terhadap nilai kedalaman. Model regresi yang dicobakan yaitu model linear, logaritmik, power dan eksponensial.
Tabel 3 Model regresi yang dicobakan
No. Bentuk Model Bentuk Standar
1. Linear y = Ax+B
2. Logaritmik y= Aln(x)+B
3. Power Y=Axn
4. Eksponensial Y=Aenx
3.5.4 Pemilihan model terbaik
Pemilihan model terbaik menggunakan uji visual kenormalan sisaan dan uji keaditifan model digunakan untuk menguji asumsi apakah nilai sisaan dan dugaan berbentuk pola atau tidak. Jika nilai sisaan dan dugaan menyebar secara acak maka model dikatakan handal, sedangkan jika pola sisaan dan dugaan berbentuk sistematis maka model dikatakan tidak handal.
3.6 Pengolahan Algoritma Van Hengel dan Spitzer
Algoritma yang dirumuskan oleh Van Hengel dan Spitzer merupakan algoritma transformasi nilai citra satelit untuk menghasilkan nilai kedalaman relatif air laut. Algoritma ini membutuhkan tiga masukan citra yang dirumuskan sebagai berikut:
(13)
Keterangan:
X1 : Citra pertama X2 : Citra kedua X3 : Citra ketiga
Y1 : Hasil transformasi utama Y2 dan Y3 : Hasil sampingan transformasi r dan s : Sudut arah rotasi
)) 1 ( arctan( ) ( = + 2 + u u s r 2 1 cov 2 1 var 2 var x x x x
u
r + = 1 3 cov 2 1 var 3 var x x x xu
s + =Formula di atas dapat dijabarkan dalam bahasa matematika perkalian matrik 3x3 sebagai berikut:
Y1 = X1 cos(r) cos(s) + X2 sin(r) cos(s) + X3 sin(s)
Y2 = -X1 sin(r) + X2 cos(r) (14)
Y3 = -X1 cos(r) sin(s) – X2 sin(r)sin(s) + X3 cos(s)
Nilai sudut arah rotasi (r dan s) dalam algoritma tersebut adalah konstanta yang diperoleh dari perhitungan dengan rumus sebagai berikut:
(15) sedangkan u diperoleh dari rumus
(16)
(17)
keterangan:
var xi : nilai varian band i cov xixj : adalah covarian bandi dan bandj
Nilai kedalaman hasil rotasi di atas merupakan nilai kedalaman relatif yang ditunjukkan oleh variabel Y1. Sedangkan hasil rotasi Y2 dan Y3 hanyalah efek yang dihasilkan oleh matriks 3x3 ini.
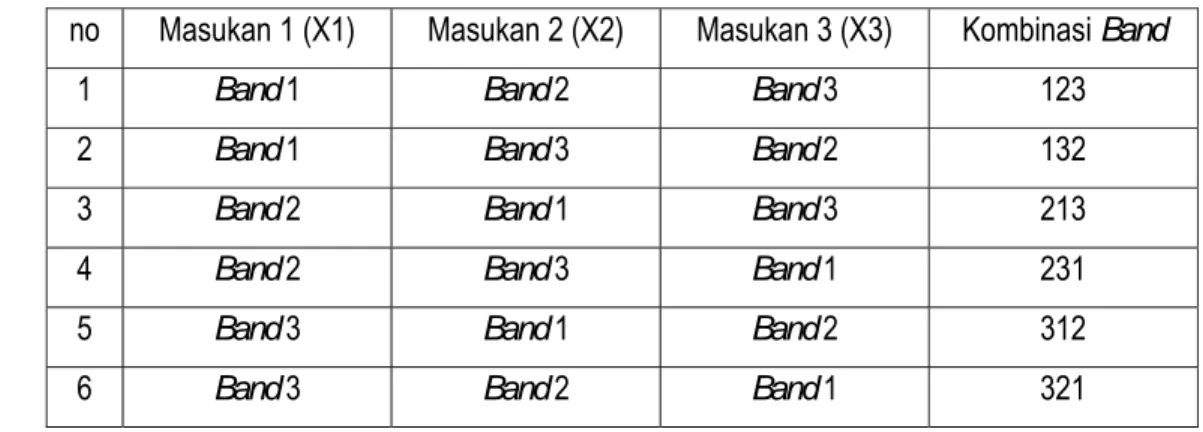
Langkah di atas diberlakukan untuk enam kombinasi citra masukan. Kombinasi tersebut dapat dilihat pada Tabel 4
Tabel 4 Susunan 6 kombinasi citra masukan algoritma Van Hengel dan Spitzer no Masukan 1 (X1) Masukan 2 (X2) Masukan 3 (X3) Kombinasi Band
1 Band 1 Band 2 Band 3 123
2 Band 1 Band 3 Band 2 132
3 Band 2 Band 1 Band 3 213
4 Band 2 Band 3 Band 1 231
5 Band 3 Band 1 Band 2 312
Kedalaman yang dihasilkan Y1 masih berupa kedalaman relatif citra. Kedalaman relatif tersebut harus diubah menjadi kedalaman absolut untuk mendapatkan nilai kedalaman yang sebenarnya. Hal ini dilakukan dengan analisa regresi antara nilai kedalaman air relatif (Y1) dengan kedalaman air sebenarnya (hasil pengambilan data lapang). Persamaan regresi yang diperoleh digunakan untuk mengonversi citra kedalaman air relatif menjadi kedalaman air absolut yang diformulasikan menjadi
aY1,i + b = Sti (18)
keterangan:
a dan b: konstanta yang diperoleh dari analisa regresi i : nomor piksel
St : kedalaman air absolut (m)
3.7 Galat (Error) Model Nilai Digital Asli dengan Algoritma Van Hengel dan Spitzer Penghitungan kedalaman dengan survei echo sounder maupun dengan
penginderaan jauh tetap akan menimbulkan Galat (error).
Perhitungan Galat (error) menggunakan rumus (Chapra 1988):
(19)
Keterangan:
ε
a: nilai Galat (error)A1: pengukuran kedalaman menggunakan data penginderaan jauh A0: estimasi kedalaman menggunakan survei echo sounder.
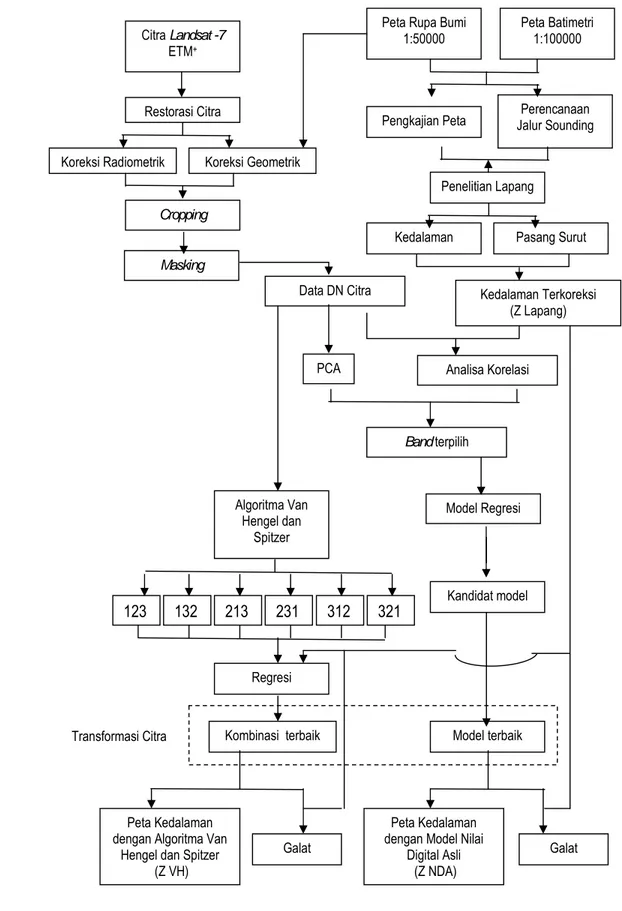
Secara ringkas tahapan-tahapan pengolahan data dapat dilihat pada Gambar 9.
ε
a= A1 – A0 X 100 %Transformasi Citra
Citra Landsat -7 ETM+
Peta Rupa Bumi 1:50000
Restorasi Citra
Koreksi Radiometrik Koreksi Geometrik
Masking Cropping
Peta Batimetri 1:100000
Pengkajian Peta Jalur Sounding Perencanaan
Penelitian Lapang Pasang Surut Kedalaman Kedalaman Terkoreksi (Z Lapang) Data DN Citra Algoritma Van Hengel dan Spitzer Model Regresi Kandidat model Model terbaik 123 132 213 231 312 321 Regresi Kombinasi terbaik Galat Galat Analisa Korelasi PCA Band terpilih Peta Kedalaman dengan Algoritma Van
Hengel dan Spitzer (Z VH)
Peta Kedalaman dengan Model Nilai
Digital Asli (Z NDA)