BAB I
PENDAHULUAN
I.1. Latar belakangListrik merupakan sumber energi yang paling vital di dunia ini. Perusahaan Listrik Negara (PLN) terus berupaya memberikan pelayanan terbaik dalam memasok energi listrik agar dapat menjangkau dan digunakan oleh seluruh masyarakat Indonesia. Saat ini, Pembangkit Listrik Tenaga Uap (PLTU) berbahan bakar batubara merupakan salah satu dari pemasok listrik utama di Indonesia. Harga batubara yang ekonomis dan Indonesia yang merupakan salah satu negara penghasil batubara terbesar di dunia menjadi alasan kuat mengapa banyak berdiri PLTU berkapasitas besar dengan memanfaatkan batubara sebagai bahan bakarnya.
Sebagian besar PLTU dibangun di tepi pantai. Salah satu alasannya ialah untuk memudahkan dalam menyuplai bahan bakar PLTU tersebut. Batubara didistribusikan dari produsen batubara ke PLTU dengan menggunakan barge. Di PLTU, sebagian batubara di tampung sementara di sebuah lapangan luas yang disebut sebagai coal yard, sebagian di ambil dan ditampung di dalam coal feeder untuk digunakan dalam proses pembakaran.
Batubara yang berada di lokasi coal yard, secara berkala dilakukan survei/pengukuran untuk menghitung volume dan tonasenya. Survei ini biasa disebut sebagai stok opname. Pengukuran stok opname bertujuan untuk mengetahui berapa stok batubara yang tersisa dan juga sebagai fungsi pengawasan. Selama ini pengukuran stok opname biasa dilakukan dengan menggunakan alat Total Station (TS). Pengukuran stok opname dengan TS memerlukan waktu yang relatif lama untuk mendapatkan hasil yang teliti. Padahal batubara yang ada di coal yard juga perlu diangkut untuk mengisi kekosongan coal feeder agar pembangkit listrik bisa terus beroperasi. Oleh karena itu diperlukan pengukuran dengan menggunakan instrumen dan metode pengukuran yang lebih cepat dan efisien, serta mampu menghasilkan nilai volume yang akurat. Salah satunya adalah dengan menggunakan Terrestrial Laser Scanner (TLS).
TLS merupakan suatu instrumen yang memancarkan sinar laser untuk memindai (scan) segala permukaan obyek yang ada disekitarnya. Hasil pemindaian tersebut direpresentasikan dalam bentuk titik (point) 3D yang disebut sebagai point cloud. Kelebihan dari alat ini ialah proses survei di lapangan yang lebih cepat dan efisien, serta nilai volume yang dihasilkan bisa lebih akurat. Kegiatan aplikatif ini bertujuan untuk mengukur dan menghitung volume stok opname batubara yang ada di PLTU Suralaya dengan menggunakan TLS Faro Focus3D X 330dan mengkaji aspek praktis penggunaan alat TLS untuk keperluan tersebut mulai dari tahapan akuisisi data, pemrosesan data serta kajian hasil hitungan volumenya terhadap catatan stok buku di PLN.
I.2. Cakupan Kegiatan
Berdasarkan data yang diperoleh, maka cakupan kegiatanini adalah:
1. Wilayah kegiatan aplikatif ini adalah coal yard 8a dan coal yard 8b pada PLTU Suralaya. Desa Suralaya, Kecamatan Pulo Merak, Kota Cilegon, Provinsi Banten.
2. Pengukuran menggunakan Metode Target Based dan Metode Cloud Based. 3. Registrasi data scan world menggunakan metode Target to Target dan
Metode Cloud to Cloud. Perangkat lunak yang digunakan adalah Faro Scene 5.3.3.
4. Pengolahan data point cloud dan hitungan volumetrik menggunakan perangkat lunak Leica Cyclone 6.0.3.
5. Nilai densitas yang dipakai dalam kegiatan ini diperoleh dari bulk density survey yang dilakukan secara terpisah dari kegiatan aplikatif ini.
6. Nilai tonase batubara dari stok buku yang diperoleh dari pengukuran draugh survey dan penimbangan saat di coal feeder adalah nilai tonase yang dijadikan sebagai acuan.
I.3. Tujuan
Berdasarkan latar belakang yang telah dijelaskan sebelumnya, maka tujuan dari kegiatan aplikatif ini adalah:
1. Penggunaan instrumen Terrestrial Laser Scanner Faro Focus3D X330 untuk pengukuran volumetrik stok opname batubara.
2. Diketahuinya selisih nilai tonase yang diperoleh dari pengukuran stok opname dengan nilai tonase dari stok buku.
I.4. Manfaat Kegiatan
Manfaat dari kegiatan aplikatif ini adalah untuk memberikan gambaran mengenai kehandalan TLS khususnya dalam pengukuran stok opname. Baik dari segi kerapatan data, kualitas data, kecepatan pengukuran, hingga keakuratan nilai volume yang diperoleh.
I.5. Landasan Teori
Stok Opname Batubara
Stok opname adalah proses menghitung jumlah barang yang ada di gudang dan mencocokkannya dengan catatan pembukuan persediaan (Himayati, 2008). Apabila ada ketidaksamaan antara hasil stok opname dengan catatan pembukuan, maka perlu dilakukan koreksi untuk jumlah barang persediaan.
Stok opname batubara merupakan suatu kegiatan yang dilakukan untuk menghitung volume stockpile batubara yang ada di coal yard hingga akhirnya diperoleh nilai tonase batubara setelah mengetahui nilai densitasnya. Nilai densitas dalam stok opname diperoleh dari hasil bulk density survey. Stok opname batubara dilakukan dengan menggunakan peralatan survei, namun nilai dari catatan pembukuan diperoleh dengan menggunakan alat timbangan sehingga hampir tidak mungkin hasil stok opname batubara bisa sama dengan catatan pembukuan. Oleh karena itu perlu adanya nilai toleransi perbedaan hasil stok opname dengan catatan pembukuan yang telah disepakati sebelumnya.
Coal Bedding
Coal bedding merupakan lapisan batubara berkualitas rendah yang sengaja dihamparkan dan dipadatkan dipermukaan tanah atau lapisan kerikil padat sebagai alas stok efektif (batubara). Fungsi dari coal bedding adalah untuk menjaga kualitas stok
efektif (batubara) yang digunakan agar tidak tercampur dengan tanah saat pengambilan. Setiap PLTU berbahan bakar batubara memiliki coal yard dengan coal bedding sebagai alas stockpilenya. Dalam kegiatan stok opname batubara, coal bedding juga ikut diukur untuk diketahui volumenya sehingga diketahui volume total dari coal bedding dan stok efektif.
Coal bedding terdiri dari dua bagian yaitu top bedding dan bottom bedding. Top bedding merupakan bagian dari coal bedding yang berbatasan dengan stok efektif. Bottom bedding merupakan bagian yang berbatasan dengan permukaan tanah. Permukaan tanah dan coal bedding dipisahkan oleh lapisan yang terbuat dari bahan high-density polyethylene (HDPE). HDPE berfungsi untuk menahan air hujan yang tercampur dengan batubara agar tidak merembes kedalam tanah. Batubara memiliki sifat asam sehingga dapat mencemari air dalam tanah bila tercampur. Pada Gambar I.1. ditampilkan contoh HDPE pada bottom bedding.
Gambar I.1. Pemasangan HDPE pada bottom bedding (Sumber: enviroseal.co.uk)
Terrestrial Laser Scanner
Terrestrial Laser Scanner (TLS) adalah instrumen akuisisi data spasial yang didirikan di atas permukaan bumi, menggunakan sinar laser yang dipancarkan untuk memindai (scan) permukaan yang ada di sekitar instrumen. Hasil pemindaian tersebut direpresentasikan dalam bentuk titik (point) yang jumlahnya sangat banyak yang disebut sebagai point cloud. Setiap titik memiliki nilai koordinat 3D terhadap tempat berdiri alat.
Teknologi laser scanner dibagi menjadi dua kategori, yaitu statis dan dinamis. Statis apabila pada saat akuisisi data, scanner berada dalam posisi yang tetap. Keunggulan dari kategori ini ialah kepresisian yang tinggi dan kerapatan titik yang relatif tinggi (high point density). Selanjutnya, Laser scanner dikategorikan dinamis apabila pada saat akuisisi data, scanner dipasang pada wahana bergerak (mobile platform). Kategori ini lebih kompleks, mahal dan memerlukan tambahan sistem penentuan posisi seperti INS (Inertial Navigation System) dan GPS (Global Positioning System) (Quintero dkk. 2008).
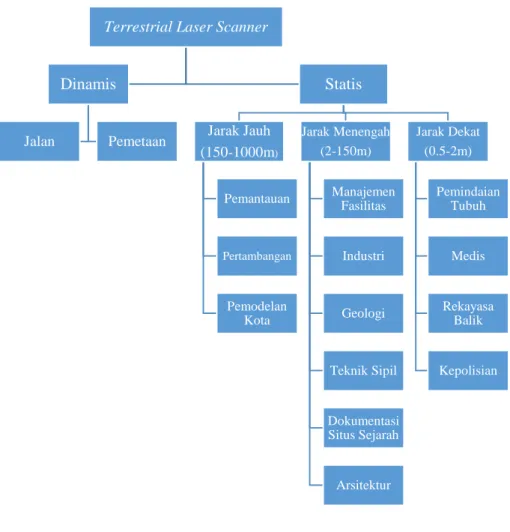
Terrestrial Laser Scanner (TLS) merupakan instrumen yang mampu merekam titik-titik dalam jumlah yang sangat besar dengan akurasi yang tinggi serta dalam waktu yang relatif singkat. Contoh bidang yang dapat menggunakan instrumen Terrestrial Laser Scanner (TLS) ini ditunjukkan pada Gambar I.2.
Gambar I.2. Aplikasi dari Terrestrial Laser Scanner (Sumber: diadaptasi dari Quintero, dkk, 2008)
Terrestrial Laser Scanner
Dinamis Jalan Pemetaan Statis Jarak Jauh (150-1000m) Pemantauan Pertambangan Pemodelan Kota Jarak Menengah (2-150m) Manajemen Fasilitas Industri Geologi Teknik Sipil Dokumentasi Situs Sejarah Arsitektur Jarak Dekat (0.5-2m) Pemindaian Tubuh Medis Rekayasa Balik Kepolisian
Permukaan target Kegiatan aplikatif ini dilakukan dengan menggunakan alat terrestrial laser scanner faro focus3D X 330. TLS yang digunakan ini termasuk dalam kategori statis karena saat akuisisi data, scanner berada dalam posisi yang tetap. TLS yang digunakan ini mampu memindai obyek dengan jarak 330 meter dari alat, sehingga TLS ini masuk dalam kategori TLS statis jarak jauh. TLS Faro Focus3D X 330 ditunjukkan pada Gambar I.3.
Gambar I.3. TLS Faro Focus3D X 330 (Sumber: FARO, 2009)
Prinsip Kerja TLS
Prinsip kerja pada TLS adalah pulse based/times of flight. Pulse based adalah pengukuran yang didasarkan pada waktu tempuh gelombang laser sejak dipancarkan sampai diterima kembali oleh penerima pulsa laser tersebut (Quintero dkk, 2008). Jarak obyek dari scanner dapat diketahui berdasarkan kecepatan gelombang sinar laser dan waktu tempuhnya. Prinsip kerja pulse based diilustrasikan pada Gambar I.4.
D
Laser yang dipancarkan
Laser yang dipantulkan
Gambar I.4. Ilustrasi pengukuran jarak pulse based (Sumber: diadaptasi dari Quintero dkk, 2008)
Pemancar Pengukur
Waktu
Pada Gambar I.4. dijelaskan persamaan sebagai berikut:
D = ½ c ∆𝑻 ... (I.1) Keterangan: D : Jarak dari scanner ke objek (m)
C : Kecepatan rambat sinar laser (3 x 108 m/dt) ∆T : Waktu tempuh sinar laser pergi dan kembali (dt)
Data hasil pengukuran menggunakan scanner memiliki sistem koordinat lokal, yaitu sumbu Y+ searah dengan arah scanner, sumbu X+ tegak lurus terhadap sumbu Y+ ke arah kanan sedangkan sumbu Z+ tegak lurus terhadap bidang XY. Origin pada sistem koordinat ini berimpit dengan sistem koordinat scanner. Sistem koordinat scanner atau sistem koordinat lokal pada scanner dapat dilihat pada Gambar I.5.
Gambar I.5. Sistem koordinat pada scanner. (Sumber: Parana, 2012)
Gambar I.5. menjelaskan mengenai sistem koordinat pada scanner. R merupakan jarak antara origin scanner terhadap obyek, α merupakan sudut horizontal antara sumbu Y+ terhadap obyek sedangkan β merupakan sudut vertikal antara obyek terhadap bidang XY. Data point cloud akan terekam sebagai X, Y, Z. Adapun proses transformasi koordinat polar ke koordinat kartesian 3 dimensi tersebut dilakukan sebagaimana persamaan I.2, I.3, dan I.4 berikut (Soeta’at, 2005)
Xa = Ra . cos β . sin α ………...(I.2) Ya = Ra . cos β . cos α ………...(I.3) Za = Ra . sin β ………...(I.4)
Dimana:
R : Jarak dari scanner ke titik objek. α : Sudut horizontal titik objek. β : Sudut vertikal objek.
Point Cloud
Point cloud merupakan kumpulan data titik dalam ruang tiga dimensi dalam suatu sistem koordinat (Sitek et al, 2006). Akuisisi data dengan menggunakan 3D Scanner menghasilkan data berupa point cloud. Point cloud merepresentasikan permukaan dari obyek yang dipindai.
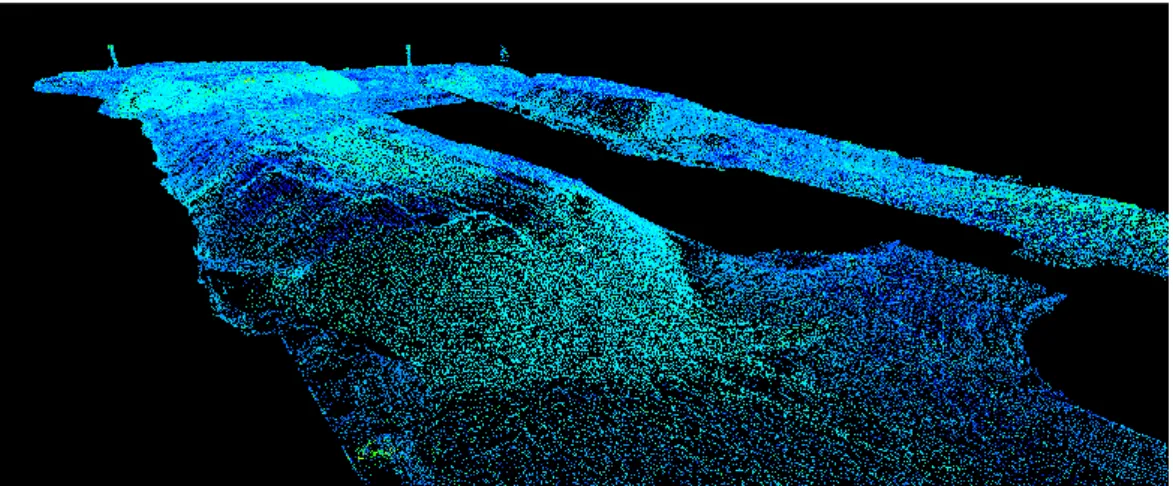
Data point cloud dapat digunakan untuk beberapa tujuan, salah satu tujuan utamanya adalah untuk pembuatan model 3 dimensi. Model 3 dimensi yang telah dibentuk dapat digunakan untuk beberapa keperluan seperti dokumentasi situs bersejarah, pemodelan bangunan, pemodelan kota, keperluan medis dan lain-lain. Dalam kegiatan aplikatif ini point cloud akan dibuat model 3 dimensi untuk merepresentasikan bentuk stockpile batubara. Contoh point cloud ditunjukkan pada Gambar I.6.
Gambar I.6. Point cloud stockpile batubara Teknik Registrasi Data Laser Scanner
Pada akuisisi data dengan laser scanner untuk obyek 3D tidak mungkin dapat dilakukan hanya dengan satu kali berdiri alat. Oleh karena itu diperlukan metode untuk dapat menggabungkan data hasil akuisisi dari beberapa kali berdiri alat ke dalam satu sistem koordinat yang sama yang disebut sebagai registrasi. Registrasi sendiri
merupakan proses penggabungan beberapa data hasil penyiaman atau scan world kedalam sistem koordinat yang sama.
Menurut Reddington (2005) Registrasi dapat dibedakan menjadi tiga metode. Ketiga metode tersebut adalah Metode Target to Target, Metode Cloud to Cloud, dan Metode Kombinasi.
Metode Target to Target
Pada metode ini, data hasil akuisisi digabungkan dengan menggunakan target sebagai acuannya. Ada beberapa jenis target, salah satunya yaitu sphere. Sphere merupakan bentuk bola sempurna dan memiliki diameter tertentu, sphere merupakan salah satu jenis target terbaik yang dapat dideteksi oleh TLS. Contoh sphere ditunjukkan pada Gambar I.7.
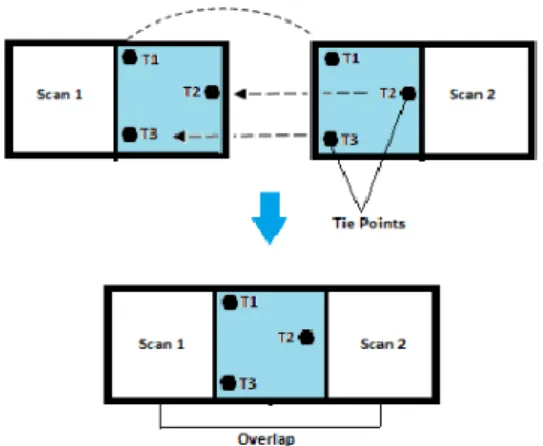
Metode target to target membutuhkan minimal tiga target terdistribusi pada tiga titik yang tidak terletak pada satu garis untuk mendeterminasi enam parameter transformasi, enam parameter transformasi tersebut adalah roll, pitch, yaw, translasi X, translasi Y, dan translasi Z. Tiga target ini diletakkan pada bagian overlap dari kedua scan world. Registrasi metode target to target diilustrasikan pada Gambar I.8.
Gambar I.7. Sphere yang didirikan di atas statip (Sumber: FARO, 2009)
Pada Gambar I.8. T1, T2, dan T3 adalah target yang diletakkan di posisi yang sama pada pemindaian di scan 1 dan scan 2. Saat proses registrasi, perangkat lunak mampu mengenali kedudukan dari target yang berada di posisi yang sama tersebut sehingga scan world scan 1 dan scan 2 dapat bergabung secara otomatis dengan pendekatan dari ketiga target tersebut.
Metode Cloud to Cloud
Pada metode ini, data hasil akuisisi digabungkan dengan menentukan point cloud yang sama pada dua atau lebih scan world yang berbeda. Karena area overlap yang memiliki ribuan hingga jutaan titik, “maka semakin banyak area overlap atau titik yang terlibat akan mengarahkan pada hasil registrasi yang lebih baik” (Barber dkk.2001). Besar kecilnya overlap antara scan world yang berbeda mempengaruhi keberhasilan dan kualitas dari hasil registrasi metode ini. Overlap yang disarankan minimal 30%. Registrasi dilakukan pada perangkat lunak dengan meminimalkan jarak antara titik pada point cloud yang bertampalan, selanjutnya menentukan jumlah iterasi untuk pendekatan secara otomatis.
Kelebihan dari metode ini adalah waktu akuisisi data dilapangan yang lebih cepat dibandingkan dengan metode target based karena tidak perlu memperhatikan persebaran target. Namun juga memiliki kelemahan yaitu proses di studio yang bisa memakan waktu lebih lama. Registrasi metode cloud to cloud diilustrasikan pada Gambar I.9 dan Gambar I.10.
Gambar I.8. Registrasi data dari dua pemindaian dengan metode target to target (Sumber: Reshetyuk, 2009)
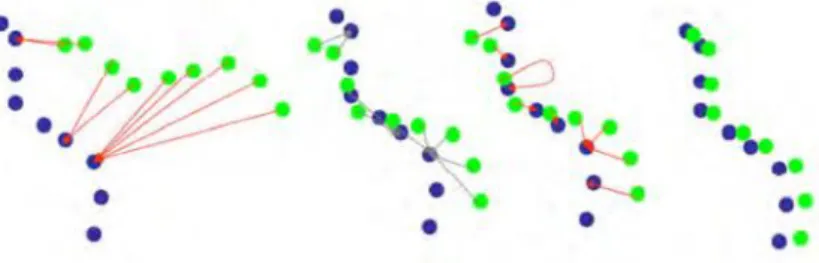
Gambar I.9. Ilustrasi proses registrasi metode cloud to cloud (Sumber: Pfeifer, 2007)
Pada Gambar I.9. point cloud berwarna biru digunakan sebagai referensi untuk point cloud berwarna hijau. Iterasi dilakukan sebanyak tiga kali dan menghasilkan registrasi seperti pada gambar yang paling kanan. Semakin banyak jumlah iterasinya, hasil registrasi akan semakin baik.
Gambar I.10. Ilustrasi registrasi cloud to cloud (Sumber: Reshetyuk, 2009)
Pada Gambar I.10. data point cloud diregistrasi dengan overlap dari hasil scan 1 dan scan 2. Tanpa overlap yang mencukupi, point cloud tidak dapat diregistrasi dengan baik.
Metode Kombinasi
Registrasi metode kombinasi merupakan gabungan dari metode target to target dan metode cloud to cloud dalam meregistrasi seluruh data hasil akuisisi dalam satu pekerjaan. Metode ini digunakan pada saat target yang digunakan untuk pengikatan tidak mampu terdeteksi oleh instrumen sehingga mengharuskan registrasi secara cloud to cloud dilakukan pada sebagian scan world. Metode ini juga digunakan apabila instrumen sengaja didirikan tidak pada jalur target (sphere) yang telah direncanakan karena kondisi tertentu.
Transformasi Koordinat
Transformasi Koordinat adalah perubahan suatu sistem koordinat ke sistem koordinat yang lain. Transformasi koordinat yang digunakan adalah transformasi koordinat sebangun 3 dimensi. Transformasi koordinat sebangun 3 dimensi bersifat tidak mengubah bentuk obyek. Rumus transformasi koordinat sebangun disajikan dalam persamaan I.5 dan I.6. (Wolf,1993)
X xo tx
Y = s R yo + ty
Z zo tz …………...(I.5)
R merupakan matriks rotasi yang terdiri dari 3 baris dan 3 kolom
m11 m12 m13 m21 m22 m23 m31 m32 m33 .………...(I.6) m11 = cos φ cos κ m21 = -cos φ sin κ m31 = sin φ
m12 = cos ω sin κ + sin ω sin φ cos κ m22 = cos ω cos κ - sin ω sin φ sin κ m32 = - sin ω cos φ
m13 = sin ω sin κ – cos ω sin φ cos κ m23 = sin ω cos κ + cos ω sin φ sin κ m33 = cos ω cos φ
ω, φ, κ = parameter rotasi tx = translasi sumbu x ty = translasi sumbu y tz = translasi sumbu z Xo, Yo, Zo = koordinat asal X, Y, Z = koordinat hasil
Transformasi koordinat dalam kegiatan ini ialah mengubah dari sistem koordinat lokal ke dalam sistem koordinat yang sebenarnya di permukaan bumi atau bisa disebut juga dengan istilah georeferensi. Georeferensi yang dilakukan dalam kegiatan ini menggunakan dua titik referensi yang diketahui koordinatnya. Titik referensi pertama digunakan sebagai acuan translasi X, Y, dan Z. Titik referensi kedua digunakan untuk mengetahui nilai azimutnya sebagai acuan rotasi dengan sumbu Z sebagai sumbu rotasinya. Tingkat ketelitian georeferensi ini bergantung pada pengukuran tinggi alat, leveling laser scanner, dan data point cloud dengan kemiringan yang tepat.
Faro Scene dan Leica Cyclone
Faro Scene adalah perangkat lunak pengolah data laser scanner yang di desain khusus untuk FARO Focus3D (FARO, 2015). Faro Scene mampu memproses data hasil pemindaian dengan cepat dan efisien karena mampu mengenali obyek dengan baik. Faro Scene juga mampu melakukan pewarnaan data hasil pemindaian dengan sangat cepat. Format data yang dapat diolah pada faro scene adalah .fls, namun faro scene mampu melakukan export data untuk mengubah data .fls ke dalam berbagai macam format data point cloud sehingga data point cloud dapat diolah pada perangkat lunak yang berbeda. Perangkat lunak pengolah point cloud ini bisa dibilang user-firendly dan mudah dipelajari khususnya untuk proses registrasi.
Leica Cyclone merupakan perangkat lunak yang dirancang dan dikembangkan oleh perusahaan perangkat lunak Cyra untuk pengolahan data yang lebih efisien khususnya untuk operasional alat laser scanner HDS (hds.leica-geosystems.com). Leica cyclone memiliki kemampuan yang sangat lengkap dalam mengolah data point cloud, mulai dari registrasi, filterisasi, georeferensi, 3D modelling (stockpile, building, piping), perhitungan volume, dan lain sebagainya. Tidak hanya kelengkapannya dalam pengolahan data, leica cyclone juga mampu mengolah data point cloud dalam berbagai format data (.pts, .ptx, .las, .3dd, ASCII, dan lain sebagainya). Perangkat lunak leica cyclone menjadi standar dalam industri pengolahan data point cloud dari terrestrial laser scanner.
Digital Terrain Model
Digital Terrain Model atau biasa disingkat DTM ialah obyek atau konsep yang digunakan untuk menampilkan suatu benda (Djurdjani, 1999). DTM dapat disajikan baik secara matematis maupun secara grafis. Namun saat ini DTM cenderung lebih banyak disajikan secara grafis dengan menggunakan bantuan program komputer. Menurut Djurdjani (1999) terdapat berbagai macam metode dalam pengumpulan sumber data untuk pembuatan DTM yaitu dengan survei konvensional, survei GNSS, fotogrametri, citra satelit, digitasi peta, dan map scanning. Metode yang dipilih disesuaikan dengan kebutuhan karena memiliki ketelitian dan biaya akuisisi yang berbeda-beda.
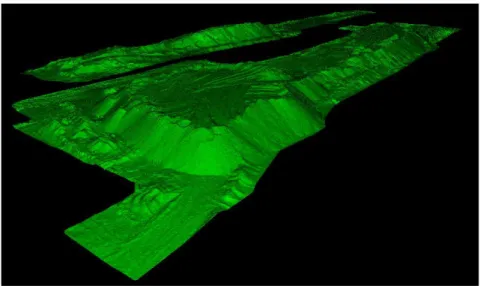
Akuisisi data dengan menggunakan TLS menghasilkan data berupa point cloud. Data point cloud perlu dilakukan pembentukan DTM agar obyek dapat dihitung volumenya. DTM yang terbentuk dari point cloud ditunjukkan pada Gambar I.11.
Gambar I.11. Visualisasi DTM stockpile batubara
Perhitungan Volume Metode Cut and Fill
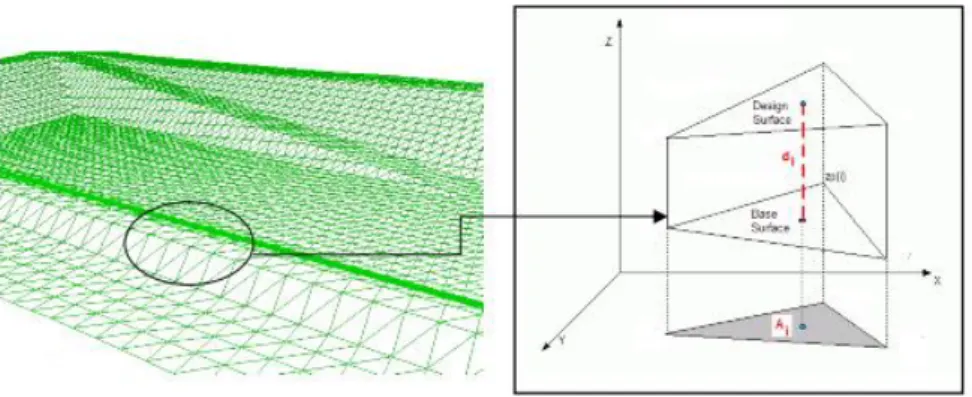
Perhitungan volume dengan metode cut and fill dilakukan dengan menghitung luasan penampang atas dan penampang bawah serta jarak antara kedua penampang tersebut (geodis-ale.com). Volume dihitung dari DTM yang dibentuk dari Triangulated Irregular Network (TIN). TIN membentuk suatu geometri prisma dari dua permukaan. Dua permukaan ini adalah design surface dan base surface. Design surface adalah permukaan yang dihitung volumenya sedangkan base surface adalah
permukaan yang dijadikan sebagai alas. Perhitungan volume metode cut and fill divisualisasikan pada Gambar I.12.
Gambar I.12. Visualisasi perhitungan volume dengan metode cut and fill (Sumber: geodis-ale.com)
Gambar I.12. menunjukkan bahwa volume total dari area dihitung dari penjumlahan volume semua prisma. Volume prisma dihitung dengan mengalikan luas bidang permukaan proyeksi (Ai) dengan jarak antara pusat massa dari dua segitiga yaitu design surface dan base surface (di). Rumus penghitungan volume untuk TIN dapat dilihat pada persamaan I.7. (geodis-ale.com)
V = Ai . di ... (I.7) Keterangan:
V : Volume prisma.
Ai : Luas bidang permukaan proyeksi.
di : Jarak antara pusat massa dua segitiga surface desain dan base desain. RMSE (Root Mean Square Error)
RMSE atau dikenal juga dengan RMS residual menurut ESRI (2006) adalah nilai perbedaan antara nilai sebenarnya dengan nilai hasil ukuran. Semakin besar nilai RMSE, maka semakin besar pula kesalahan hasil ukuran terhadap kondisi yang sebenarnya. RMSE didapatkan dari proses pembagian antara nilai akar kuadrat total selisih ukuran kuadrat dengan jumlah ukuran yang digunakan. Rumus menghitung RMSE disajikan pada persamaan I.8.
𝑅𝑀𝑆𝐸 = √∑(𝑅−𝑅1)2
𝑛 ………(I.8)
Keterangan:
RMSE : Root Mean Square Error R : Nilai yang dianggap benar R1 : nilai hasil ukuran
n : banyak ukuran yang digunakan
Persamaan 1.8 dapat dijabarkan menjadi persamaan 1.9 sebagai berikut: RMSE = √∑[(X−X1)2+(Y−Y1)2+ (Z−Z1)2]
n ………(I.9)
Keterangan:
RMSE : Root Mean Square Error
X : Nilai koordinat X yang dianggap benar X1 : nilai koordinat X hasil ukuran
Y : Nilai koordinat Y yang dianggap benar Y1 : nilai koordinat Y hasil ukuran
Z : Nilai koordinat Z yang dianggap benar Z1 : nilai koordinat Z hasil ukuran
n : Jumlah point cloud yang digunakan untuk proses registrasi.
Pengukuran dengan menggunakan TLS khususnya TLS Faro, nilai RMSE otomatis ditampilkan setelah registrasi berhasil dilakukan. Pada perangkat lunak faro scene, RMSE diistilahkan sebagai Mean. Kualitas hasil registrasi digambarkan dalam bentuk indikator warna. Warna hijau menunjukan nilai Mean < 10mm, warna kuning menunjukan nilai Mean ≥ 10mm dan ≤ 20mm, dan warna merah menunjukan nilai Mean ≥ 20mm (FARO, 2015).
American Society for Testing and Material (ASTM)
ASTM merupakan organisasi internasional yang berpusat di Amerika yang bergerak untuk menyusun standarisasi teknik untuk material, produk, sistem dan jasa (www.astm.org). ASTM dibentuk pada tahun 1898 oleh Charles B. Dudley, Ph.D.
Sejauh ini sudah lebih dari 12000 standar dari ASTM dipakai di seluruh dunia demi meningkatkan kualitas produk, meningkatkan keselamatan kerja, memperkuat akses perdagangan, dan meningkatkan kepercayaan konsumen.
Pada kegiatan aplikatif ini, nilai volume yang diperoleh dikalikan dengan densitas sehingga diperoleh nilai tonase batubara. Nilai tonase batubara yang diperoleh kemudian dibandingkan dengan catatan stok buku milik PLN dengan standar toleransi kesalahan yang disepakati. Standar dari ASTM yang berkaitan dengan tonase adalah dokumen D6542 yang berjudul Standard Practice for Tonnage Calculation of Coal in a Stockpile. Dokumen ASTM dapat dilihat pada lampiran G. Pada dokumen tersebut dicantumkan mengenai toleransi kesalahan dalam penghitungan tonase stockpile. Rumus mengenai penghitungan toleransi kesalahan tersebut dapat dilhat pada persamaan I.10 (ASTM, 2002).
𝐶 = √𝐷2+ 𝐴2 ... (I.10)
Keterangan:
C : Toleransi perhitungan tonase (%).
D : Toleransi bulk density (%). Dalam dokumen D6347 disebutkan bahwa besar toleransi untuk bulk density adalah 2,68%.
A : Toleransi volumetric survey (%). Dalam dokumen D6172 disebutkan bahwa toleransi survei volumetric survey adalah 0,74%.
Pada persamaan I.10, nilai C diperoleh dengan memasukkan besaran toleransi bulk density dan toleransi volumetric survey ke dalam persamaan I.10 maka hasilnya adalah 2,78%. Dasar inilah yang dijadikan standar toleransi kesalahan dalam kegiatan aplikatif ini.