Pengenalan Simulink
untuk Pengendalian Proses
Oleh
Johnner P. Sitompul
Taufik Hidayat
Buana Giri Suta
C.B. Rassendra
Ronny Purwadi
Departemen Teknik Kimia
Fakultas Teknologi Industri
Institut Teknologi Bandung
Kata Pengantar
Buku pengantar ini merupakan hasil atau kumpulan dari pelaksanaan kuliah Pengendalian Proses (TK 357) dan Pengendalian Proses Multivariabel (TK 567) di Departemen Teknik Kimia. Hasil yang dituangkan disini pertama kali dipacu oleh semangat untuk membuat kuliah Pengendalian Proses menjadi suatu yang menarik dan mudah untuk dimengerti para mahasiswa. Draft pertama dikerjakan oleh J.P. Sitompul dan Taufik Hidayat.
Percobaan pertama dilakukan pada kuliah TK357 semester II/2000-2001, dan dilanjutkan pemakaiannya pada kuliah TK568 semester I/2001-2002. Beberapa bahan ditambahkan pada bagian akhir sebagai panduan untuk memperdalam bidang pengendalian proses, seperti algoritma untuk Feed-Forward, Feed-Back Multivariabel Control. Penelusuran lebih jauh terhadap SIMULINK dapat menerapkan bermacam domain, atau bermacam-macam advanced control algorithm, seperti Dynamic Matrix Control, Neural-Based Control, Fuzzy-Based Control, ataupun membuat algoritma sendiri untuk seperti Internal Model Control. Studi lebih lanjut akan dapat membuat pengenalan yang lebih dalam terhadap SIMULINK untuk pengendalian proses atau Control System.
Buku ini masih banyak kekurangannya, kritik dan saran sangat diharapkan untuk pengembangan proses belajar mengajar di Departemen Teknik Kimia Institut Teknologi Bandung.
Bandung, Januari 2002 Atas nama para penulis
Pengenalan Simulink untuk Kuliah Pengendalian Proses
Tahap-tahap pembuka Simulink : 1. Buka program Matlab (versi 5.3)
2. Klik icon Simulink Library Browser (akan tampak seperti Gambar 1 kiri) 3. Klik icon Create a new model untuk file baru atau klik Open a model untuk
melihat/mengedit file lama. (akan muncul seperti Gambar 1 kanan).
Gambar 1. Penampakan layar pada saat membuka program Simulink
Contoh1
step) (fungsi s 0.1 (s) y transfer) (fungsi 1) (2s 0.2 G(s) (s) y . G(s) y(s) : loop -open Persamaan sp sp = + = =Gambar 2. Penampakan layar untuk model contoh 1 Pemodelannya sebagai berikut :
Setelah klik icon Create a new model , klik dua kali folder Simulink pada Simulink Library Browser , sehingga akan muncul seperti Gambar 3.
Gambar 3. Penampakan layar uraian folder Simulink Kemudian ikuti tahap-tahap berikut ini :
1. Pasang ysp(s) = 0.1/s dengan cara :
Klik dua kali folder Sources , lalu klik folder Step tahan dan pindahkan pointer ke lembar kerja Simulink, sehingga fungsi step akan terpasang. Lalu ubah step time, initial value, dan final value sesuai dengan cara : klik dua kali fungsi step yang sudah terpasang lalu ubah Step time dengan angka 0 (t < 0 harga ysp(t) = 0), Initial value tetap 0, dan Final value ubah dengan angka 0.1 (t
>= 0 harga ysp(t) = 0.1).
2. Pasang G(s) = 0.2/(2s + 1) dengan cara :
Klik dua kali folder Continuous , lalu klik folder Transfer Fcn tahan dan pindahkan pointer ke lembar kerja Simulink, sehingga fungsi transfer akan terpasang. Lalu ubah pembilang dan pembagi dengan cara : klik dua kali fungsi transfer yang sudah terpasang lalu ubah Numerator dengan [0.2] dan Denominator dengan [2 1].
3. Pasang Scope untuk menampung hasil simulasi, dengan cara :
Klik dua kali folder Sinks , lalu klik folder Scope tahan dan pindahkan pointer ke lembar kerja Simulink, sehingga scope akan terpasang.
4. Buat garis yang menghubungkan Step dengan Transfer Fcn dan antara Transfer Fcn dengan Scope, dengan cara : klik pada sisi kanan Step tahan dan gerakkan ke sisi kanan Transfer Fcn, lakukan hal yang sama untuk garis kedua.
Klik Simulation pada Menu lembar kerja Simulink, lalu klik Start.
6. Hasil simulasi dapat dilihat dengan cara : klik dua kali Scope yang terpasang, lalu klik icon Autoscale untuk memperjelas gambar kurva. (lihat Gambar 4)
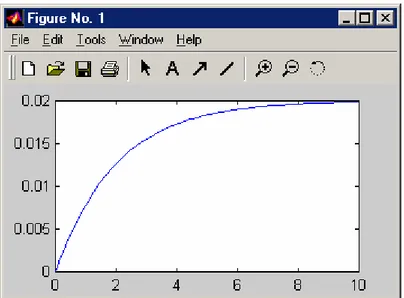
Gambar 4. Penampakan hasil running simulasi model contoh 1
Gambar 4 di atas menunjukkan bahwa dalam keadaan open loop, perubahan set point sebesar 10 % mengakibatkan perubahan output 2 %.
Contoh 2
Persamaannya sama dengan contoh 1, tetapi dibuat closed-loop dengan menambahkan Proportional Controller Gc = Kc = 5. (seperti terlihat pada Gambar 5)
Gambar 5. Penampakan layar untuk model contoh 2
Pemodelannya sama seperti contoh 1, perbedaannya yaitu penambahan Sum dan Gain dari folder Math, serta membuat garis percabangan.
Setelah Sum dipasangkan, blok dapat diubah menjadi rectangular dari Icon shape, serta mengubah ++ menjadi +- dari List of signs.
Setelah Gain terpasang, nilai Gain dapat diubah dengan angka 5. Hasil simulasi contoh 2 dapat dilihat pada Gambar 6.
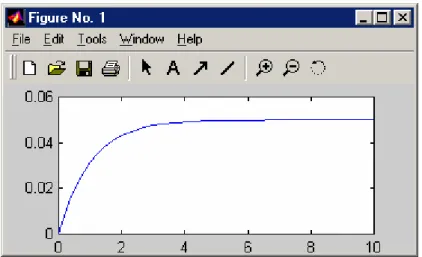
Gambar 6. Penampakan hasil running simulasi model contoh 2
Gambar 6 di atas menunjukkan bahwa dalam keadaan close loop serta penambahan proportional controller dengan Kc besar, offset dapat diturunkan.
Contoh 3
Persamaannya sama dengan contoh 1, tetapi dibuat closed-loop dengan menambahkan Proportional Integral Controller yakni :
0.2 dan t 5 Kc dengan , s t 1 1 Kc Gc I I = = + =
Gambar 7. Penampakan layar untuk model contoh 3 Hasil simulasi contoh 3 dapat dilihat pada Gambar 8.
Gambar 8. Penampakan hasil running simulasi model contoh 3
Gambar 8 di atas menunjukkan bahwa dalam keadaan close loop serta penambahan proportional integral controller offset dapat dihilangkan.
Contoh 4
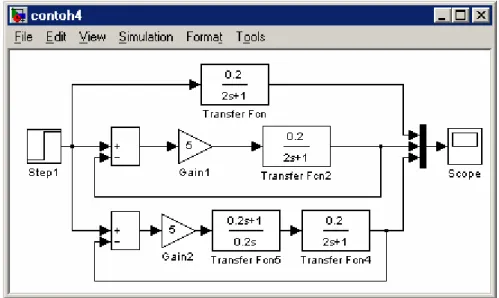
Contoh 4 ini merupakan gabungan dari contoh 1, 2, dan 3 untuk melihat responnya secara bersamaan. (lihat Gambar 9).
Gambar 9. Penampakan layar untuk model contoh 4
Hasil simulasi contoh 4 dapat dilihat pada Gambar 10.
Gambar 10 menunjukkan bahwa respon dari contoh 1, 2, dan 3 dapat disatukan dengan menggunakan Mux pada folder Signals & Systems.
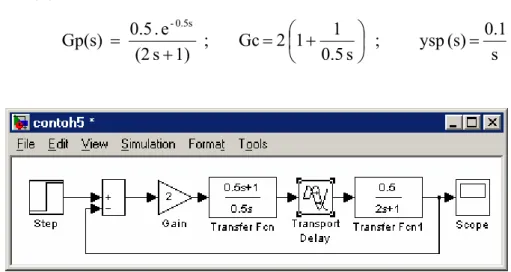
Contoh 5
(Servo problem untuk proses dengan time-delay) Fungsi transfer : s 0.1 (s) ysp ; s 0.5 1 1 2 Gc ; 1) s (2 e . 0.5 Gp(s) 0.5s -= + = + =
Gambar 11. Penampakan layar untuk model contoh 5
Transport Delay berasal dari folder Continuous, nilai Time delay diganti angka 0.5. Respon dari model contoh 5 dapat dilihat pada Gambar 12.
Gambar 10. Penampakan hasil running simulasi model contoh 5
Gambar 10 menunjukkan bahwa adanya time delay sebesar 0.5, sistem tersebut masih tetap stabil. Bisa dicoba untuk time delay sebesar 1 sistem menjadi tidak stabil seperti
Gambar 11. Penampakan hasil running simulasi model contoh 5 (dengan td = 1)
Contoh 6
Contoh 6 adalah regulatory problem untuk kasus di contoh 5, dengan d(s) = 0.1/s.
Pada regulatory problem, ysp(s) dibuat sama dengan 0, dan gangguan d(s) dihubungkan dengan garis setelah Gp (khusus untuk feedback control). Lihat Gambar 12.
Gambar 12. Penampakan layar untuk model contoh 6
Gambar 13. Penampakan hasil running simulasi model contoh 6
Gambar 13 menunjukkan bahwa controller berfungsi dengan baik karena pengaruh gangguan dapat diredam.
Soal Latihan
Kasus 1 (example 10.1 Stephanopoulos)
Fi Fo Fungsi transfer : s 1 Fi(s) dan 2, tp 3, Kp 1) s (tp Kp Fi(s) h(s) Gp(s) = = = + = =
Buat masing-masing model simulink dari kasus di atas dan running model untuk mendapatkan h fungsi dari t (t = 0 s/d 20), jika :
a. kondisi open loop, (tanpa pengendali)
b. kondisi close loop dengan Proportional Controller Gc = Kc = 2, c. kondisi close loop dengan Proportional Integral Controller, dengan
0.5 dan t 0.5, Kc s t 1 1 Kc Gc(s) I I = = + =
Kasus 2 (problem IV.50 Stephanopoulos) Ti T Qsteam Fungsi transfer : 4, tp 1, td 0.2, Kp 1) s (tp e . Kp Qst(s) T(s) Gp(s) -tds = = = + = =
Buat masing-masing model simulink dari kasus di atas dan running model untuk mendapatkan h fungsi dari t (t = 0 s/d 20), :
a. kondisi open loop, Qst = 0.1/s dan Qst = -0.1/s
b. kondisi close loop dengan Proportional Controller Gc = Kc = 2; Qst lihat a, c. kondisi close loop dengan Proportional Integral Controller; Qst lihat a, dengan
0.25 dan t 0.25, Kc s t 1 1 Kc Gc(s) I I = = + =
Kasus 3 (Regulatory problem)
Sama dengan kasus 2, dan ditambahkan fungsi transfer load :
1 td 0.5, tp 1, Kp ; 1) s tp ( e Kp Ti(s) T(s) Gd(s) s td -= = = + = =
Buat masing-masing model simulink dari kasus di atas dan running model untuk mendapatkan h fungsi dari t (t = 0 s/d 20), :
a. kondisi open loop, Ti(s) = -0.1/s
b. kondisi close loop dengan Proportional Controller Gc = Kc = 2. c. kondisi close loop dengan Proportional Integral Controller, dengan
0.25 dan t 0.25, Kc s t 1 1 Kc Gc(s) I I = = + =
Kasus-Kasus untuk Latihan SIMULINK
KASUS I
Perumusan Masalah: DPC Controller hsp hm + - ε Fi" FoGambar 1 Sistem Berorde Satu
Peneracaan massa di dalam tangki:
R h F F F dt dh A "= i"− o = i"− " " " " i F R h dt dh A + = (1)
Pada saat steady state:
s i s s F R h dt dh A + = , (2)
Persamaan konservasi massa dalam tangki dapat dinyatakan dalam variabel deviasi dengan cara mengurangi persamaan (1) dengan persamaan (2):
i F R h dt dh A + = (3)
dengan variabel deviasi didefinisikan sebagai berikut:
s h h h= "− s i i i F F F = "− ,
Hasil transformasi Laplace persamaan (3) adalah sebagai berikut:
[
( ) (0)]
1 h(s) F(s) R h s h s A − + = iBerdasarkan definisi variabel deviasi harga h(0) = 0, sehingga persamaan terakhir dapat disusun ulang menjadi sebagai berikut:
(
1)
( ) ) ( s F s AR R s h i = + Definisikan: R Kp = AR p = τsehingga diperoleh persamaan fungsi transfer sebagai berikut: ) 1 ( ) ( ) ( ) ( + = = s K s F s h s G p p i p τ (4)
Berikut ini disajikan harga-harga parameter yang terdapat dalam persamaan (4):
2 3 = = p p K τ
Variabel gangguan (disturbance) terhadap tangki ini adalah laju alir masuk (Fi).
Gangguan yang terjadi berupa fungsi tangga (step) sebesar 1 satuan, yang dapat dinyatakan dalam domain Laplace (fungsi s) sebagai berikut:
s s Fi( )= 1
Dengan menggunakan data dan harga-harga parameter tersebut, maka simulasi keadaan dinamik sistem dapat dilakukan. Simulasi ini dilakukan pada rentang waktu t = 0 – 20, pada berbagai macam kondisi operasi, yaitu:
a. Kondisi open loop (tanpa pengendali).
b. Kondisi close loop dengan pengendali Proportional: 2
)
( = c =
c s K
G
c. Kondisi close loop dengan pengendali Proportional-Integral:
+ = s K s G I c c 1 1 ) ( τ dengan 5 . 0 5 . 0 = = I c K τ
h _ sp S co p e 3 2 s+ 1 P ro ce ss 0 .5 s+ 1 0 .5 s P I Co n tro l l e r 1 1 P Co n tro l l e r 0 .5 G a i n 1 2 G a i n F_ i n p u t
Gambar 2 Diagram Blok Simulink Open Loop vs Close Loop
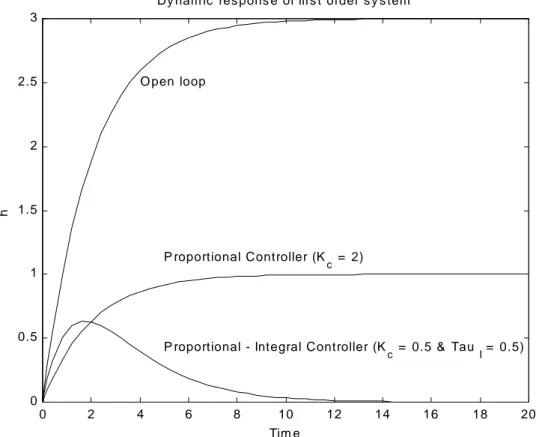
0 2 4 6 8 10 12 14 16 18 20 0 0.5 1 1.5 2 2.5 3
Dy nam ic res pons e of firs t order s y s tem
Tim e
h
O pen loop
P roportional Controller (K c = 2)
P roportional - Integral Controller (K
c = 0.5 & Tau I = 0.5)
Gambar 3 Perbandingan Antara Sistem Open Loop dengan Sistem Close Loop
PI Controller P Controller Open loop
¾ Berdasarkan Gambar 3 terlihat bahwa sistem tanpa pengendali (close loop) yang mengalami gangguan fungsi tangga (step) akan menuju ke suatu kondisi tunak (steady state) yang baru. Harga kondisi tunak yang baru (hs,2) sama dengan besar
gangguan fungsi tangga dikalikan dengan harga gain (Kp) proses, yaitu: hs,2 = 1
x 3 = 3.
¾ Sistem yang dikendalikan dengan pengendali tipe proportional tidak dapat menjaga sistem agar tetap berada dalam kondisi tunak awal (hs = 0).
Berdasarkan hasil simulasi yang disajikan dalam Gambar 3 terlihat bahwa sistem berpengendali proportional akan menuju ke suatu kondisi tunak yang baru. Penyimpangan dari keadaan tunak awal (offset) yang dialami oleh sistem berpengendali proportional lebih kecil dibandingkan dengan sistem tanpa pengendali.
¾ Sistem yang dikendalikan dengan pengendali tipe proportional-integral dapat menjaga sistem agar tetap berada dalam kondisi tunak awal (hs = 0). Jadi
pengendali tipe proportional-integral dapat menghilangkan offset dan menjaga ketinggian tangki tetap pada harga kondisi tunak awal (hs = 0).
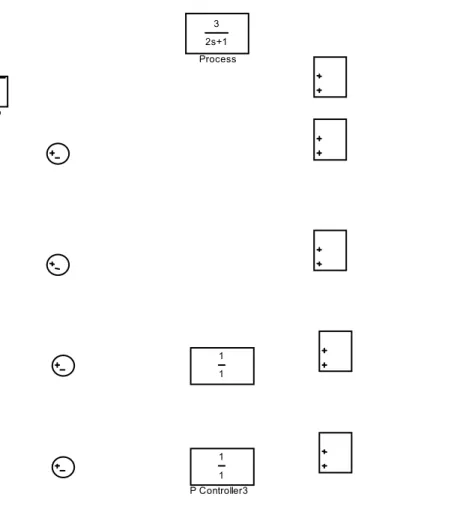
h_sp Scope 3 2s+1 Process 1 1 P Controller3 1 1 0 2 4 6 8 10 12 14 16 18 20 0 0.5 1 1.5 2 2.5 3
E ffec t of gain value to the dy nam ic res pons e us ing proportional c ontroller
Tim e h O pen loop K c = 0.5 K c = 2 K c = 10 K c = 50
Gambar 5 Pengaruh Harga Gain Controller (Kc) Terhadap Respon Dinamik
Sistem Berpengendali Proportional
¾ Walaupun pengendali tipe proportional tidak dapat menjaga sistem agar tetap berada dalam kondisi tunak awal (hs = 0), akan tetapi kinerja pengendali tipe proportional dapat ditingkatkan dengan cara memperbesar harga gain controller
(Kc). Hal ini dapat dilihat pada hasil simulasi yang disajikan dalam Gambar 5.
Semakin besar harga Kc, maka harga offset dapat diperkecil.
Pengaruh Kc Terhadap Kinerja Pengendali Proportional-Integral:
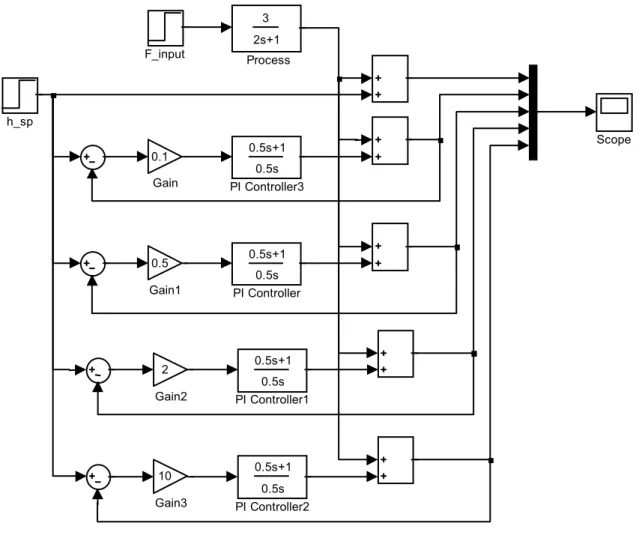
h_sp Scope 3 2s+1 Process 0.5s+1 0.5s PI Controller3 0.5s+1 0.5s PI Controller2 0.5s+1 0.5s PI Controller1 0.5s+1 0.5s PI Controller 10 Gain3 2 Gain2 0.5 Gain1 0.1 Gain F_input
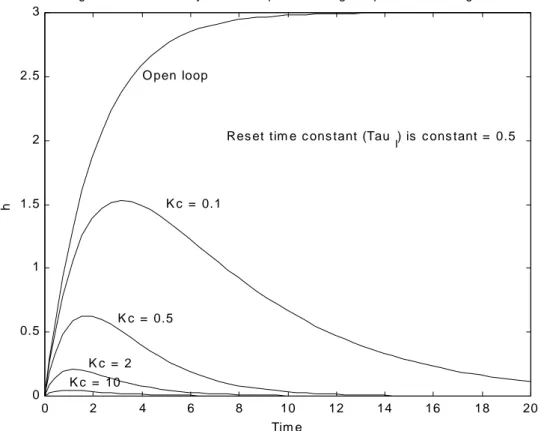
0 2 4 6 8 10 12 14 16 18 20 0 0.5 1 1.5 2 2.5 3
E ffec t of gain value to the dy nam ic res pons e us ing P roportional - Integral c ontroller
Tim e h O pen loop K c = 0.1 K c = 0.5 K c = 2 K c = 10
Res et tim e c ons tant (Tau
I) is c ons tant = 0.5
Gambar 7 Pengaruh Harga Gain Controller (Kc) Terhadap Respon Dinamik
Sistem Berpengendali Proportional-Integral
¾ Seperti halnya pengendali tipe proportional, Kc memberikan pengaruh yang
sama terhadap kinerja pengendali tipe proportional-integral. Hal ini dapat dilihat pada Gambar 7 yang merupakan hasil simulasi pengendali tipe
proportional-integral yang dievaluasi pada berbagai harga Kc. Secara umum kenaikan harga
Kc akan mempercepat respon sistem dan memperkecil harga offset yang dialami
sistem.
¾ Harga Kc sebaiknya tidak terlalu kecil, karena hal ini akan memperlambat
sistem dalam proses penghilangan offset. Sebagai contoh pada harga Kc = 0.01 di
Gambar 7, pada saat t = 20 sistem belum dapat menghilangkan offset. Sementara pada harga Kc yang lebih besar, sistem telah berhasil menghilangkan offset dan
Pengaruh τI Terhadap Kinerja Pengendali Proportional-Integral: h_sp Scope 3 2s+1 Process 0.1s+1 0.1s PI Controller3 5s+1 5s PI Controller2 s+1 s PI Controller1 0.5s+1 0.5s PI Controller 0.5 Gain3 0.5 Gain2 0.5 Gain1 0.5 Gain F_input
0 2 4 6 8 10 12 14 16 18 20 0 0.5 1 1.5 2 2.5 3
E ffec t of res et tim e to the dy nam ic res pons e us ing P roportional - Integral c ontroller
Tim e h O pen loop Tau I = 5 Tau I = 1 Tau I = 0.5 Tau I = 0.1 G ain value (K c) is c ons tant = 0.5
Gambar 9 Pengaruh Harga Reset Time (τI) Terhadap Respon Dinamik
Sistem Berpengendali Proportional-Integral
¾ Harga reset time (τI) memberikan pengaruh yang berlawanan dengan pengaruh
harga Kc terhadap kinerja pengendali tipe proportional-integral. Semakin besar
harga τI, maka sistem semakin lambat responnya dan offset yang terjadi pun
semakin besar. Hal ini dapat dilihat pada Gambar 6 yang merupakan hasil simulasi pengendali tipe proportional-integral yang dievaluasi pada berbagai harga τI.
Kasus II
Perumusan Masalah: Controller Tsp Tm + -ε Fi Fo Ti" T" Thermocouple T" Fst" QGambar 10 Sistem Tangki Berpengaduk yang Dilengkapi Pemanas Peneracaan massa di dalam tangki:
o i F F dt dV − =
Diasumsikan laju alir masuk (Fi) serta laju alir keluar (Fo) konstan dan harganya
sama: 0 = dt dV (5) sehingga volume cairan dalam tangki akan konstan.
Peneracaan energi di dalam tangki:
Q F T C F T C F dt VT C d st p o i p i p " " " ) " ( + − = ρ
(
T T)
F Q FC dt dT V Cp "= p i"− " + st" ρ " " " " st p i F FC Q T T dt dT F V + = + ρ Definisikan: p p FC Q K = F V p ρ τ = sehingga diperoleh: " " " " st p i p T T K F dt dT + = + τ (6)Pada saat steady state:
s st p s i s s p dt T T K F dT , , + = + τ
Persamaan konservasi energi yang dinyatakan dalam variabel deviasi adalah sebagai berikut: st p i p dt T T K F dT + = + τ (6)
dengan variabel deviasi didefinisikan sebagai berikut:
s T T T = "− s i i i T T T = "− , s st st st F F F = "− ,
Hasil transformasi Laplace persamaan (6) adalah sebagai berikut:
[
sT(s) T(0)]
T(s) Ti(s) KpFst(s)p − + = +
τ
Harga T(0) = 0 sehingga persamaan terakhir dapat disusun ulang menjadi sebagai berikut: ) ( ) 1 ( ) ( ) 1 ( 1 ) ( F s s K s T s s T st p p i p + + + = τ τ (7-a) atau
) ( ) ( ) (s G F s G T s T = p st + d i (7-b)
dengan Gp dan Gd berturut-turut adalah fungsi transfer untuk manipulated variable
(Fst) dan disturbance (Ti). Berikut ini disajikan harga-harga parameter yang terdapat
dalam persamaan (7-a):
4 2 . 0 = = p p K τ
Dalam sistem berpengendali umpan mundur (feedback controller) terdapat dua jenis masalah yang dapat muncul yaitu:
1. Masalah servo:
Variabel gangguan (disturbance) tidak berubah, dengan kata lain Ti(s) = 0.
Perubahan yang terjadi dalam sistem adalah perubahan harga set point. Untuk sistem yang digambarkan dalam Gambar 10, perubahan set point yang terjadi adalah: • s s Fst( )= 0.1 • s s Fst( )=−0.1
Perubahan yang terjadi dalam masalah servo ini mengalami penundaan (delay) selama 1 satuan waktu, sehingga fungsi transfer proses (Gp) berubah menjadi:
) 1 ( ) ( + = − s e s G p s p τ 2. Masalah regulator:
Harga set point tidak berubah (Fst(s) = 0), sedangkan harga variabel gangguan
mengalami perubahan sebagai berikut:
s s
Ti( )=−0.1
Penundaan (delay) yang terjadi dalam masalah regulator adalah sebesar 0.5 satuan waktu, sehingga fungsi transfer load (Gd) berubah menjadi:
) 1 ( ) ( 5 . 0 + = − s e K s G p s p d τ
Simulasi untuk kedua masalah tersebut dilakukan pada rentang waktu t = 0 – 20 dengan berbagai macam kondisi operasi, yaitu:
a. Kondisi open loop (tanpa pengendali).
b. Kondisi close loop dengan pengendali Proportional: 2
)
( = c =
c s K
G
c. Kondisi close loop dengan pengendali Proportional-Integral:
+ = s K s G I c c 1 1 ) ( τ dengan 25 . 0 25 . 0 = = I c K τ
Diagram Blok Simulink: Transport Delay2 Transport Delay1 Transport Delay Set Point (Fst) 0.2 4s+1 Set Point Function2 0.2 4s+1 Set Point Function1 0.2 4s+1 Set Point Function Scope 0.25s+1 0.25s PI Controller 1 1 P Controller Load Function Delay 1 4s+1 Load Function 0.25 Gain1 2 Gain Disturbance (Ti)
Gambar 11 Diagram Blok Simulink Untuk Kasus II
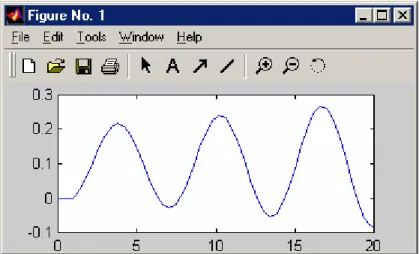
Masalah Servo:
Hasil simulasi masalah servo dengan fungsi gangguan Fst(s) = 0.1 / s dan Fst(s) = - 0.1
0 10 20 30 40 50 60 70 80 90 100 0 0.02 0.04 0.06 0.08 0.1 0.12
Dy nam ic res pons e of s ervo problem (F
s t = 0.1 / s ) Tim e T e m p e rat ur e O pen loop P roportional Controller (K c = 2) P roportional - Integral Controller (K
c = 0.25 & Tau I = 0.25)
Gambar 12 Masalah Servo dengan Fst = 0.1 / s
0 10 20 30 40 50 60 70 80 90 100 -0.12 -0.1 -0.08 -0.06 -0.04 -0.02 0
Dy nam ic res pons e of s ervo problem (F
s t = - 0.1 / s ) Tim e T e m p er a tur e O pen loop P roportional Controller (K c = 2)
P roportional - Integral Controller (K
c = 0.25 & Tau I = 0.25)
Gambar 13 Masalah Servo dengan Fst = –0.1 / s
¾ Berdasarkan Gambar 12 dan 13 terlihat bahwa sistem tanpa pengendali (close
Sistem tanpa pengendali ini tidak dapat mencapai keadaan tunak (steady-state) baru yang diinginkan, yaitu 0.1 (untuk Gambar 12) dan –0.1 (untuk Gambar 13).
¾ Sistem yang dikendalikan dengan pengendali tipe proportional sedikit lebih baik dibandingkan dengan sistem tanpa pengendali. Karena keadaan tunak baru yang tercapai sudah hampir mendekati harga yang diinginkan. Agar harga keadaan tunak baru dapat lebih mendekati harga yang diinginkan, maka harga
gain controller (Kc) harus diperbesar.
Pada harga Kc yang cukup kecil sistem berkelakuan sebagai sistem dinamik
berorde dua dengan tipe overdamped. Semakin kecil harga Kc maka respon
sistem akan semakin lambat (sluggish). Oleh karena itu biasanya harga Kc
diperbesar, sehingga respon sistem akan semakin cepat, tetapi akan mengakibatkan respon sistem berosilasi (underdamped).
Pada harga Kc yang tidak terlalu besar, setelah berosilasi sistem akhirnya akan
menjadi stabil. Pada saat stabil tersebut, respon sistem yang dihasilkan sudah hampir mendekati harga set-point yang diinginkan. Akan tetapi apabila harga Kc dibuat menjadi sangat besar, akan mengakibatkan sistem tidak dapat
mencapai kestabilan. Seluruh penjelasan ini disajikan secara grafis dalam Gambar 14 berikut. 0 10 20 30 40 50 60 70 80 90 100 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14
E ffec t of gain c ontroller (K
c) to dy nam ic res pons e of s ervo problem (Fs t = 0.1 / s )
Tim e T e m p er a tur e O pen loop K c = 0.5 K c = 5 K c = 20 K c = 25 P roportional Controller
¾ Sistem yang dikendalikan dengan pengendali tipe proportional-integral dapat mengatasi masalah perubahan harga set point (servo problem). Sistem dengan pengendali tipe proportional-integral secara cepat akan menuju harga set point yang diinginkan. Secara umum sistem pengendali tipe proportional-integral akan berkelakuan sebagai sistem dinamik berorde dua. Harga gain controller (Kc) dan reset time (τI) akan menentukan tipe dinamik orde dua yang dapat terjadi, yaitu:
underdamped, critically damped, atau overdamped.
Harga Kc yang kecil akan menyebabkan sistem menjadi lebih sluggish dan
berkelakuan sebagai sistem berode dua dengan tipe overdamped. Peningkatan harga Kc akan menyebabkan respon sistem menjadi lebih cepat dan berosilasi
(underdamped). Semakin besar harga Kc, maka overshoot sistem menjadi semakin
besar dan sistem semakin lama berosilasi. Harga Kc yang lebih besar dari 1 akan
menyebabkan sistem menjadi sangat tidak stabil. Pengaruh harga Kc terhadap
dinamika sistem berpengendali tipe proportional-integral disajikan dalam Gambar 15. 0 10 20 30 40 50 60 70 80 90 100 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18
E ffec t of gain c ontroller (K
c) to dy nam ic res pons e of s ervo problem (Fs t = 0.1 / s )
Tim e T e m p er a tur e O pen loop K c = 0.05 K c = 0.1 K c = 0.5 K
c = 1 P roportional-Integral Controller (TauI = 0.25)
Gambar 15 Pengaruh Harga Kc Terhadap Dinamika Sistem Berpengendali PI
Pengaruh harga τI terhadap dinamika sistem berpengendali proportional-integral
berlawanan dengan pengaruh harga Kc. Semakin kecil harga τI, respon sistem
menyebabkan sistem menjadi tidak stabil. Pengaruh harga τI terhadap
dinamika sistem berpengendali tipe proportional-integral disajikan dalam Gambar 16. 0 10 20 30 40 50 60 70 80 90 100 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16
E ffec t of res et tim e (Tau
I) to dy nam ic res pons e of s ervo problem (Fs t = 0.1 / s )
Tim e T e m p e rat ur e O pen loop Tau I = 0.1 Tau I = 0.5 Tau I = 1 Tau I = 2 P roportional-Integral Controller (K c = 0.25)
Gambar 16 Pengaruh Harga τI Terhadap Dinamika Sistem Berpengendali PI
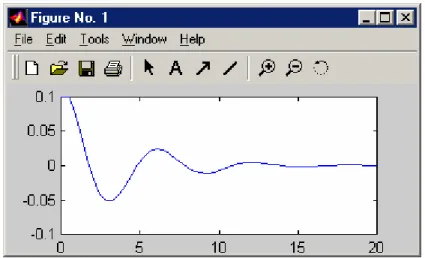
Masalah Regulator:
Hasil simulasi masalah regulator dengan fungsi gangguan τi(s) = – 0.1 / s disajikan
0 10 20 30 40 50 60 70 80 90 100 -0.1 -0.08 -0.06 -0.04 -0.02 0 0.02
Dy nam ic res pons e of regulatory problem (T
i = - 0.1 / s ) Tim e T e m p e rat ur e O pen loop P roportional Controller (K c = 2) P roportional - Integral Controller (K
c = 0.25 & Tau I = 0.25)
Gambar 17 Masalah Regulator dengan τi(s) = – 0.1 / s
0 10 20 30 40 50 60 70 80 90 100 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
Effect of gain controller (Kc) to dynamic response of regulator problem (Ti = 0.1 / s)
Time T e m per at ur e Open loop Kc = 0.5 K c = 5 Kc = 20 Kc = 25 Proportional Controller
0 10 20 30 40 50 60 70 80 90 100 -0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1
Effect of gain controller (Kc) to dynamic response of regulator problem (Fst = 0.1 / s)
Time T e m p er at ur e Open loop Kc = 0.05 Kc = 0.1 Kc = 0.5 Kc = 1
Proportional-Integral Controller (TauI = 0.25)
Gambar 19 Pengaruh Harga Kc Terhadap Dinamika Sistem Berpengendali PI
0 10 20 30 40 50 60 70 80 90 100 -0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1
Effect of reset time (TauI) to dynamic response of regulator problem (Fst = 0.1 / s)
Time T e m per at ur e Open loop Tau I = 0.1 Tau I = 0.5 Tau I = 1 Tau I = 2 Proportional-Integral Controller (Kc = 0.25)
Feedforward Control
Contoh kasus yang lain adalah menyangkut sistem pengendalian feedforward yang cukup sering dijumpai di lapangan. Contoh yang diambil adalah pengendalian komposisi distilat untuk gangguan laju alir atau komposisi umpan. Tipe pengendali yang dihasilkan oleh sistem pengendali dengan two
degree of freedom akan akan sangat mudah disimulasikan setelah mendesain controller untuk
set-point dan load changes. Hasil simulasinya untuk perubahan laju alir dan komposisi umpan dapat dilihat dalam gambar 7.
Gambar 6: Blok Diagram Sistem Pengendalian Feedforward untuk Kolom Distilasi
Sebagai catatan, model fungsi transfer dari input-output proses dinyatakan dalam persamaan berikut,
dengan suku zF, XD, R, dan F adalah fraksi mol umpan, fraksi mol distilat, laju refluks dan laju alir
umpan. 0 20 40 60 80 100 120 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 waktu (detik) fr ak s i k o m pos is i
perubahan konsentrasi umpan(zf) perubahan laju alir (F)
Gambar 7: Performansi Pengendalian Feedforward untuk Kolom Distilasi
F X Feed Forward Controller F X B, D, 1 5 , 1 5s e 25 , 1 10 10 10 -5s + = + = + = − − s e R X z X s e F X t s D F D s D d τ
Multivariable Control
Untuk kasus yang kompleks seperti multivariable control dapat diakomodasikan dengan Simulink. Pengendalian proses ini dapat dilakukan untuk sistem algoritma multi-loops, yang sangat berinteraksi. Proses yang diambil untuk kasus ini adalah kolom distilasi dari hasil penelitian Wood and Berry. Secara singkat kolom tipe plate ini untuk memisahkan campuran biner metanol-air dengan komposisi distilat dan bawah dikendalikan berturut-turut oleh laju alir refluks dan laju steam di boiler (vapor boil-up rate).
Kondenser CC LC LC CC FC F ZF D XD B XB Reboiler
Gambar 8: Blok Diagram Sistem Pengendalian Proses Multivariabel untuk Kolom Distilasi
Model proses distilasi sebagai fungsi transfer input output dinyatakan dalam persamaan vektor dan matriks
y(s)= Gp(s) u(s) + Gd(s) d(s)
dengan vektor y menyatakan output fraksi mol distilat (xD) dan fraksi mol bottom (xB). Input
(manipulated variabel) adalah refluks, R, dan vapour boil-up, V, sedangkan gangguan adalah, laju alir F.
Elemen matriks, Gp(s) dan Gd(s), diberikan dibawah ini.
Untuk menguji parameter pengendali yang diperoleh dari hasil tuning dapat dilakukan dengan membuat gambar Nyquist terhadap persamaan karakteristik dan I + GPGc dari sistem pengendalian (closed-loop) hasil pengujian menunjukkan tuning parameter dalam keadaan stabil.
Performansi sistem pengendalian untuk perubahan set point dan load diberikan dalam gambar 9. 1 13.2s e 3.8 1 9 . 14 8 . 3 , 1 14.4s e 19.4 1 10.9s e 6.6 1 21.0s e 18.9 1 7 . 16 8 . 12 3.4s -1 . 8 3s -7s --3s + + + + + + − − s e s e s s
0 20 40 60 80 100 120 -0.2 -0.1 0 0.1 0.2 0.3 0.4
Regulatory Problem dengan Perubahan Gangguan sebesar 20%
F rak s i K o m pos is i Waktu (detik) Xd Xb
Gambar 9 : Perfomansi Sistem Pengendalian Proses Multivariabel untuk Kolom Distilasi Kasus
Regulatory 0 20 40 60 80 100 120 -0.2 0 0.2 0.4 0.6 0.8 1
Servo Problem dengan Perubahan Masukkan sebesar 80%
F rak s i K o m p os is i Waktu (detik) Xd Xb
Gambar 10 : Perfomansi Sistem Pengendalian Proses Multivariabel untuk Kolom Distilasi Kasus Servo
Catatan: fungsi transfer yang memiliki delay akibat transport lag dan ketidaklinearan proses akan dengan mudah diterjemahkan dalam SIMULINK tanpa melakukan linearisasi, walaupun linearisasi tersedia juga dalam routine. Algoritma yang lebih kompleks (advanced) dapat juga diterapkan dalam kuliah pengendalian, seperti Model-Based Control, seperti MPC, DMC atau Internal Model Control atau langsung menggunakan routine dari SIMULINK .