UNIVERSITAS PEMBANGUNAN NASIONAL
“VETERAN” JAWA TIMUR FAKULTAS TEKNIK
PROGRAM STUDI TEKNIK MESIN
LAPORAN PRAKTIKUM GETARAN MEKANIK
Disusun oleh:
Amajida Sadrina 21036010032 Kelompok A2
Semester Genap 2023/2024
ii
COVER ... i
DAFTAR ISI ... ii
DAFTAR GAMBAR ... iv
DAFTAR TABEL ... vi
DAFTAR LAMPIRAN ... vii
DAFTAR NOTASI ... viii
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Rumusan Masalah ... 2
1.3 Tujuan ... 2
1.4 Manfaat ... 2
BAB II LANDASAN TEORI ... 3
2.1 Getaran Mekanik ... 3
2.2 Free Vibration ... 3
2.2.1 Free Vibration with Viscous Damping ... 3
2.2.1 Free Vibration with Coulumb Damping ... 4
2.3 Damping Ratio ... 5
2.4 Natural Frequency ... 6
2.5 Half Band Power Method ... 7
2.6 Bandwidth ... 8
2.7 Rubber... 9
BAB III METODOLOGI PENELITIAN ... 10
3.1 Lokasi Praktikum ... 10
3.2 Kondisi Praktikum ... 10
3.2.1 Alat ... 10
3.2.2 Kondisi Pengujian ... 10
3.3 Proses Pengumpulan Data ... 11
3.4 Flow Chart ... 12
iii
4.2 Analisis Data ... 13
4.2.1 Rubber 1 ... 13
4.2.2 Rubber 2 ... 13
4.2.3 Rubber 3 ... 13
4.3 Pembahasan ... 14
4.3.1 Rubber 1 ... 14
2.3.2 Rubber 2 ... 17
2.3.3 Rubber 3 ... 20
BAB V KESIMPULAN DAN SARAN ... 24
5.1 Kesimpulan ... 24
5.2 Saran ... 25
DAFTAR PUSTAKA ... 26
LAMPIRAN ... 28
iv
Gambar 2.1 Free Vibration with Viscous Damping ... 4
Gambar 2.2 Natural Frequency ... 7
Gambar 2.3 Half Band Power ... 7
Gambar 2.4 Bandwidth... 8
Gambar 2.5 Rubber ... 9
Gambar 3.1 Skema Alat Pengujian ... 10
Gambar 3.2 Flow Chart ... 12
Gambar 4.1 Inputkan pemrograman untuk data mentah ... 14
Gambar 4.2 Grafik data mentah ... 14
Gambar 4.3 Inputkan pemrograman untuk hubungan antara amplitude dengan frequency ... 15
Gambar 4.4 Grafik hubungan antara amplitude dengan frequency... 15
Gambar 4.5 Inputkan pemrograman untuk hubungan antara power dengan frequency ... 15
Gambar 4.6 Grafik hubungan antara power dengan frequency untuk (fn) ... 15
Gambar 4.7 Inputkan pemrograman untuk Bandwidth (f1 dan f2) ... 16
Gambar 4.8 Grafik Bandwidth ... 16
Gambar 4.9 Plotting untuk f1 pada Bandwidth ... 16
Gambar 4.10 Plotting untuk f2 pada Bandwidth ... 16
Gambar 4.11 Inputkan pemrograman untuk data mentah ... 17
Gambar 4.12 Grafik data mentah ... 17
Gambar 4.13 Inputkan pemrograman untuk hubungan antara amplitude dengan frequency ... 17
Gambar 4.14 Grafik hubungan antara amplitude dengan frequency... 18
Gambar 4.15 Inputkan pemrograman untuk hubungan antara power dengan frequency ... 18
Gambar 4.16 Grafik hubungan antara power dengan frequency untuk (fn) ... 18
Gambar 4.17 Inputkan pemrograman untuk Bandwidth (f1 dan f2) ... 18
v
Gambar 4.20 Plotting untuk f2 pada Bandwidth ... 19
Gambar 4.21 Inputkan pemrograman untuk data mentah ... 20
Gambar 4.22 Grafik data mentah ... 20
Gambar4.23 Inputkan pemrograman untuk hubungan antara amplitude dengan frequency ... 20
Gambar 4.24 Grafik hubungan antara amplitude dengan frequency... 21
Gambar 4.25 Inputkan pemrograman untuk hubungan antara power dengan frequency ... 21
Gambar 4.26 Grafik hubungan antara power dengan frequency untuk (fn) ... 21
Gambar 4.27 Inputkan pemrograman untuk Bandwidth (f1 dan f2) ... 21
Gambar 4.28 Grafik Bandwidth ... 22
Gambar 4.29 Plotting untuk f1 pada Bandwidth ... 22
Gambar 4.30 Plotting untuk f2 pada Bandwidth ... 22
vi
Tabel 3.1 Data Hasil Pengamatan ... 11 Tabel 4.1 Data Hasil Pengamatan ... 13
vii
Lampiran 1. Raw Data Rubber 1... 28
Lampiran 2. Raw Data Rubber 2... 28
Lampiran 3. Raw Data Rubber 3... 28
Lampiran 4. Rubber 1 ... 29
Lampiran 5. Rubber 2 ... 29
Lampiran 6. Rubber 3 ... 29
Lampiran 7. Axial Fan ... 29
Lampiran 8. Settingan Aplikasi Phyphox ... 30
Lampiran 9. Susunan alat praktikum ... 30
Lampiran 10. Proses pengambilan data Rubber 1, 2, dan 3 ... 30
viii 𝜁 = Damping ratio
𝑓1 = Lower frequency dari bandwidth 𝑓2 = Upper frequency dari bandwidth 𝑓𝑛 = Natural frequency dari sistem 𝜔𝑛 = Natural frequency dari sistem 𝑘 = Kekakuan pegas
𝑚 = Massa
𝑥(𝑡) = Perpindahan dari posisi keseimbangan pada waktu (𝑡) ẋ = Kecepatan dari perpindahan 𝑥(𝑡)
BAB I
PENDAHULUAN
1.1 Latar Belakang
Getaran mekanik dapat didefinisikan sebagai gerak osilasi dari sistem mekanik di sekitar titik/posisi seimbang. Getaran terjadi karena adanya gaya eksitasi, hampir semua mesin yang bergerak akan bergetar meskipun mungkin intensitasnya sangat kecil. Karena secara praktis tidak mungkin menghilangkan eksitasi getaran sama sekali. Eksitasi dapat terjadi karena adanya ketidakseimbangan pada mesin itu sendiri atau dari sumber di luar mesin.
Getaran berhubungan dengan gerak osilasi benda dan gaya yang berhubungan dengan gerak tersebut. Semua benda yang mempunyai massa dan elastisitas dapat bergetar sampai derajat tertentu sehingga pada perancangannya memerlukan pertimbangan sifat osilasinya.
Ada dua kelompok getaran yang umum yaitu, getaran bebas dan getaran paksa. Sistem yang bergetar dengan satu frekuensi naturalnya disebut dengan sistem satu derajat kebebasan, sedang sistem yang bergetar dengan dua frekuensi naturalnya disebut sistem dengan dua derajat kebebasan (Husen & Faizal H, 2019).
Pada banyak hal terjadinya getaran sangat tidak diinginkan karena getaran dapat mengganggu kenyamanan, menimbulkan ketidak presisian atau menurunkan kualitas kerja mesin-mesin perkakas. Bahkan getaran juga dapat merusak konstruksi mesin.
Untuk itu diperlukan banyak upaya untuk meredam getaran, seperti dapat dilakukan dengan meminimalkan gaya eksitasi akan tetapi juga dapat dilakukan dengan memasang sistem peredam (Dewanto, 2014).
1.2 Rumusan Masalah
1. Bagaimana karakteristik dan sifat getaran mekanik dapat dijelaskan?
2. Apa faktor-faktor yang mempengaruhi intensitas dan frekuensi getaran mekanik?
3. Bagaimana dampak getaran mekanik terhadap kinerja suatu sistem?
1.3 Tujuan
1. Mempelajari fenomena getaran mekanik secara experimental dengan model getaran dari axial fan
2. Mengukur rasio redaman, zeta (𝜁), dengan metode half band power pada sinyal respon akselerasi sistem axial fan.
3. Mengetahui karakteristik redaman sistem oleh tiga jenis rubber dengan acuan nilai zeta (𝜁).
1.4 Manfaat
1. Kontribusi terhadap pemahaman ilmiah mengenai getaran mekanik.
2. Panduan praktis untuk mengoptimalkan sistem yang melibatkan getaran mekanik.
3. Peningkatan keamanan, keandalan, dan efisiensi dalam berbagai aplikasi teknologi.
BAB II
LANDASAN TEORI
2.1 Getaran Mekanik
Getaran mekanik adalah gerakan berulang atau osilasi yang terjadi pada suatu objek atau struktur. Getaran mekanik dapat terjadi pada berbagai jenis benda, seperti bangunan, mesin, kendaraan, dan peralatan lainnya. Getaran mekanik dapat dihasilkan oleh berbagai sumber, seperti mesin berputar, aliran fluida, aktivitas manusia, atau gempa bumi. Getaran mekanik dapat mempengaruhi kenyamanan, kesehatan, dan integritas struktur bangunan (Purwanto, Zulfachmi, & Purwaka, 2019).
Getaran dapat dikategorikan berdasarkan eksitasi yang bekerja secara kontinyu, seberapa bebasnya, atau sistem massanya. Klasifikasi pertama membedakan getaran menjadi getaran bebas dan getaran paksa. Menurut derajat kebebasannya getaran dapat dibedakan sebagai getaran derajat satu, dua, atau n derajat sesuai dengan banyakya koordinat bebas (independence) yang diperlukan untuk mendefinisikan persamaan gerak sistem tersebut (Rusianto & Susastriawan, 2021).
2.2 Free Vibration
Free vibration atau getaran bebas adalah fenomena di mana suatu sistem bergetar setelah diberi gangguan awal dan tidak ada gaya eksternal yang mempengaruhinya. Getaran bebas mengacu pada osilasi alami suatu struktur atau sistem tanpa adanya kekuatan atau gangguan eksternal. Hal ini terjadi ketika sebuah struktur atau sistem tergeser dari posisi kesetimbangannya dan kemudian dilepaskan, menyebabkannya bergetar pada frekuensi alaminya. Gerakan struktur atau sistem selama getaran bebas ditentukan oleh massa, kekakuan, dan karakteristik redamannya (Carrera & Pagani, 2014).
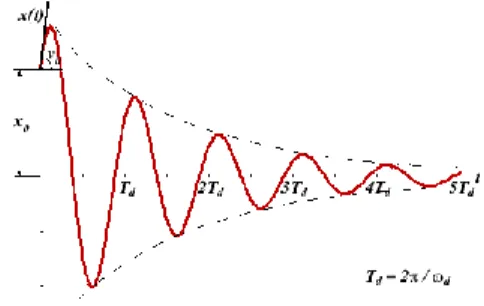
2.2.1 Free Vibration with Viscous Damping
Ketika eksitasi dihilangkan, semua sistem nyata mengalami redaman. Energi hilang dan getaran hilang seiring waktu. Mungkin ada faktor seperti perpindahan,
kecepatan, tegangan, atau lainnya yang menyebabkan gaya redaman yang tepat tentang disipasi energi. Secara umum, fungsi arbitrer, a(t), yang berkurang terhadap waktu, dan konstanta, γ, yang terkait dengan jumlah redaman ke dalam persamaan gerak sistem massa-pegas, dapat digunakan untuk memodelkan redaman (Benaroya, Mark Nagurka, & Seon Han, 2017).
Gambar 2.1 Free Vibration with Viscous Damping
Persamaan gerak pada free vibration with viscous damping dinyatakan sebagai : 𝑚ẍ + 𝑐ẋ + 𝑘𝑥 = 𝐹(𝑡)...(2.1) ẍ + 2𝜁𝜔𝑛ẋ + 𝜔𝑛 2𝑘 = 0...(2.2)
2.2.1 Free Vibration with Coulumb Damping
Coulumb damping adalah redaman yang terjadi akibat gesekan yang tidak tergantung pada kecepatan, melainkan bergantung pada gaya normal yang bekerja pada sistem. Istilah ini diambil dari nama ilmuwan Prancis, Charles-Augustin de Coulomb, yang mempelajari berbagai fenomena fisika, termasuk hukum gesekan kering di antara permukaan material. Faktor-faktor yang mempengaruhi Coulumb damping meliputi :
1. Gaya normal: Gaya yang tegak lurus terhadap permukaan yang bersentuhan.
coulumb damping tergantung pada gaya normal ini.
2. Koefisien gesekan statis dan kinetik: Permukaan material memiliki koefisien gesekan statis (ketika permukaan dalam keadaan diam) dan koefisien gesekan kinetik (ketika permukaan sedang bergesekan).
3. Tidak bergantung pada kecepatan: Coulumb damping tidak bergantung pada kecepatan gerakan sistem. Redaman ini tetap konstan selama permukaan bersentuhan, tidak peduli seberapa cepat atau lambat gerakan sistem.
2.3 Damping Ratio
Damping ratio adalah parameter penting dalam analisis sistem dinamis. Damping ratio mengukur seberapa cepat getaran sistem akan mereda setelah distimulasi. Konsep damping ratio sangat relevan dalam mekanika, rekayasa struktur, kontrol getaran, dan berbagai bidang ilmu yang memperhatikan respon dinamis dari sistem. Damping ratio umumnya disimbolkan dengan 𝜁 (zeta) dan berkaitan erat dengan sistem osilasi linier (Lee, 2020). Ini digunakan untuk membandingkan dua ukuran penting :
1. Damping terhadap kekakuan: Menunjukkan seberapa besar energi yang dihilangkan dari sistem setiap siklus getaran.
2. Damping kritis: Nilai damping ratio yang membuat sistem mengalami redaman kritis, di mana sistem kembali ke posisi keseimbangan tanpa osilasi yang berkepanjangan.
Damping ratio dapat dihitung dari bandwidth dengan menggunakan rumus berikut : 𝜁 = 𝑓2−𝑓1
2𝑓𝑛 ...(2.3) Pengaruh damping ratio dalam sistem getaran dibagi menjadi 4 (Rusianto &
Susastriawan, 2021), yaitu : 1. Undamped (ζ = 0)
Sistem undamped adalah respon sistem yang terus menerus berlanjut tanpa memiliki nilai akhir yang tetap karena faktor redamannya bernilai nol. Ketika suatu sistem mengalami getaran tanpa peredaman, energi getaran tetap terjaga, dan amplitudo getaran dapat meningkat tanpa batas jika tidak ada gaya luar yang membatasi atau mengontrolnya.
2. Underdamped (ζ < 1)
Sistem underdamped apat menghasilkan osilasi yang berkepanjangan, karena energi getaran tidak cepat teredam. Kondisi underdamped dapat ditemui dalam berbagai sistem mekanik, seperti suspensi kendaraan atau pegas-massa.
3. Critically Damped (ζ = 1)
Sistem critically damped menunjukkan redaman optimal yang memungkinkan sistem kembali ke posisi keseimbangan tanpa osilasi berlebihan.
Critically damped adalah nilai damping yang ideal dalam banyak kasus, karena memungkinkan redaman maksimal tanpa mengorbankan respons sistem secara berlebihan. Sistem critically damped dapat ditemui dalam berbagai konteks, dari sistem suspensi mobil hingga sistem mekanisme pegas-massa.
4. Overdamped (ζ > 1)
Dalam sistem overdamped nilai damping yang sangat tinggi bisa menghasilkan respon sistem yang cepat terhadap stimulus dan meredakan getaran dengan sangat cepat. Namun, terkadang ini dapat mengakibatkan sistem terasa sangat kaku. Sistem overdamped sering diinginkan dalam beberapa aplikasi, terutama ketika kestabilan dan ketahanan terhadap perubahan tiba-tiba diperlukan.
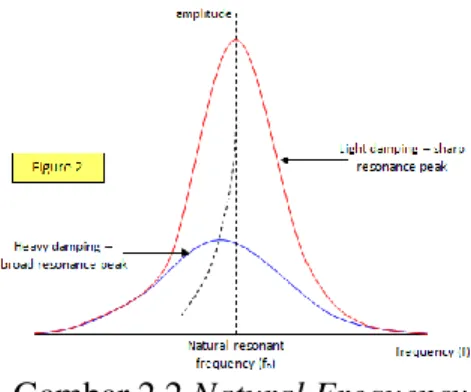
2.4 Natural Frequency
Natural Frequency merupakan karakteristik khas dari sistem yang ditentukan oleh sifat-sifat intrinsiknya. Hal ini sangat bergantung pada parameter sistem seperti massa, kekakuan (stiffness), dan redaman. Untuk sistem pegas-massa sederhana, misalnya, frekuensi natural berkaitan erat dengan konstanta pegas (stiffness) dan massa.
Pentingnya frekuensi natural dalam hal analisis dinamis yaitu, untuk memahami perilaku dinamisnya. Ini membantu memprediksi bagaimana sistem akan merespons secara alami terhadap gaya-gaya eksternal atau stimulus tertentu. Jika dalam hal resonansi yaitu ketika frekuensi eksternal mendekati atau sama dengan frekuensi natural sistem, amplitudo getaran sistem bisa meningkat secara signifikan (Kleiman, 1989).
Gambar 2.2 Natural Frequency
Natural Frequency dihitung berdasarkan sifat-sifat intrinsik sistem, seperti massa dan kekakuan. Rumus umum untuk natural frequency dalam sistem osilasi linier adalah:
𝜔𝑛 = √𝑘
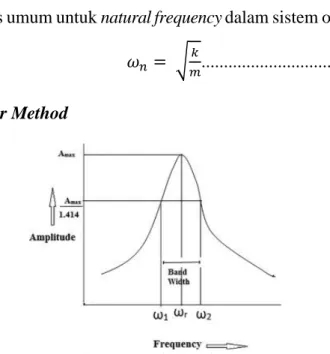
𝑚...(2.2) 2.5 Half Band Power Method
Gambar 2.3 Half Band Power
Half Band Power Method adalah teknik yang digunakan untuk menganalisis respon frekuensi sistem getaran mekanis. Metode ini berfungsi sebagai alat untuk memperkirakan dampak beberapa parameter pada respons frekuensi sistem. Metode ini beroperasi dengan memanfaatkan frekuensi di tengah-tengah antara dua titik resonansi pada kurva respons frekuensi. Kemudian memasukkan faktor amplifikasi dalam perhitungan untuk memastikan respon frekuensi pada frekuensi yang diinginkan. Pendekatan ini sangat berguna ketika memeriksa respon frekuensi sistem dengan berbagai mode, seperti konfigurasi struktural yang rumit yang ditemukan dalam desain bangunan.
Metode Half Band Power Method sangat penting dalam analisis getaran mekanik dan membantu para insinyur memahami respons frekuensi pada sistem secara efektif.
Metode Half Band Power digunakan untuk menganalisa mode getaran pada struktur mekanik, seperti jembatan, bangunan, dan mesin. Metode ini mengasumsikan bahwa mode getaran pada sistem getaran mekanik terletak pada frekuensi yang sama dengan setengah jalur yang saling terpisah. Hal ini memungkinkan penentuan frekuensi resonansi pada sistem hanya dengan data frekuensi setengah jalur antara dua titik resonansi saja (Zhang & Ma, 2013).
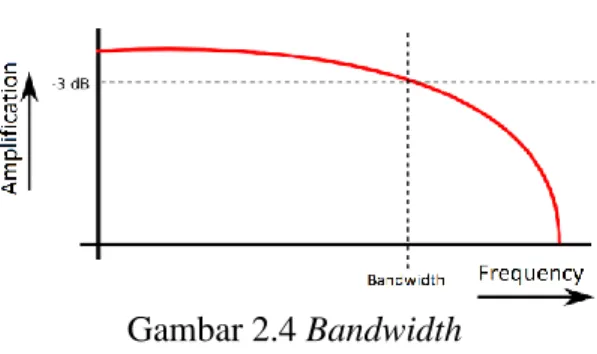
2.6 Bandwidth
Gambar 2.4 Bandwidth
Bandwidth mengacu pada rentang frekuensi atau rentang data yang dapat diakomodasi oleh suatu sistem atau saluran komunikasi. Dalam berbagai konteks, istilah "bandwidth"
digunakan untuk menyatakan seberapa besar spektrum frekuensi atau kapasitas informasi yang dapat ditransmisikan atau diproses oleh suatu sistem atau saluran. Jika dalam konteks getaran mekanik, bandwidth merujuk pada rentang frekuensi di sekitar frekuensi pusat suatu sistem atau komponen yang mengalami getaran.
Pentingnya konsep bandwidth terletak pada pemahaman karakteristik dinamis sistem, terutama dalam konteks analisis getaran. Mengetahui bandwidth membantu insinyur untuk merancang sistem yang responsif terhadap berbagai frekuensi yang mungkin terjadi, atau sebaliknya, membatasi respons terhadap frekuensi tertentu untuk menghindari fenomena resonansi yang dapat merugikan. Bandwidth dapat diukur dalam Hertz (Hz) dan biasanya dinyatakan sebagai rentang frekuensi di mana respons sistem atau komponen tetap di atas batas ambang tertentu (Ba'din, Daraio, & Sim, 2010).
2.7 Rubber
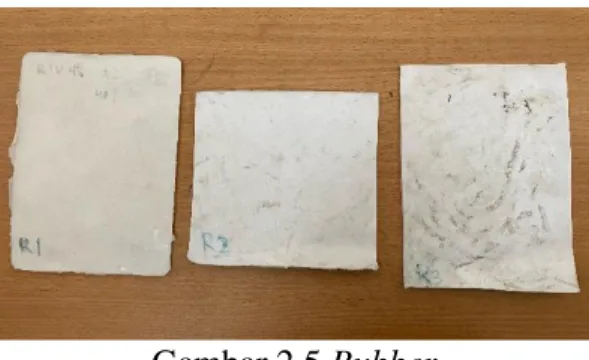
Gambar 2.5 Rubber
Rubber atau karet dalam konteks getaran mekanik sering digunakan sebagai bahan elastomer untuk peredaman getaran. Sifat elastis karet memungkinkannya menyerap dan meredam energi getaran yang dihasilkan oleh mesin atau peralatan mekanik. Karet umumnya digunakan dalam bentuk bantalan, isolator, atau elemen peredam untuk mengurangi transmisi getaran dari sumber ke struktur atau perangkat terkait. Kekakuan dan daya serap getaran karet bergantung pada formulasi dan konstruksi bahan tersebut, sehingga dapat dirancang untuk meredam getaran pada frekuensi tertentu atau dalam kondisi lingkungan tertentu (Raffoul, Garcia, Pilakoutas, Guadagnini, & Medina, 2016).
Selain sebagai bahan peredam getaran, karet juga dapat digunakan dalam elemen- elemen getaran mekanik lainnya, seperti sabuk, karet pegas, atau elemen elastis dalam sistem suspensi. Keunggulan karet dalam peredaman getaran melibatkan kemampuannya untuk menyerap energi getaran dengan baik, elastisitas yang tinggi, dan daya tahan terhadap deformasi. Oleh karena itu, dalam rekayasa getaran mekanik, pemilihan karet sebagai material peredam dapat membantu meningkatkan kenyamanan, keamanan, dan kinerja sistem mekanik secara keseluruhan (Yadav &
Tiwari, 2017).
BAB III
METODOLOGI PENELITIAN
3.1 Lokasi Praktikum
Praktikum Getaran Mekanik modul 1 dilaksankan pada hari Senin, 6 November 2023 yang berlokasi di Laboratorium Ergonimi lantai 1 Gedung II Fakultas Teknik Universitas Pembangunan Nasional “Veteran” Jawa Timur.
3.2 Kondisi Praktikum 3.2.1 Alat
Alat yang diperlukan dalam melakukan praktikum Getaran Mekanik sebagai berikut:
1. Axial Fan 2. Rubber peredam 3. Handphone 4. Phypox App 5. Matlab Software 3.2.2 Kondisi Pengujian
Gambar 3.1 Skema Alat Pengujian
Alat dirakit sesuai dengan skema pengujian yang ditampilkan pada gambar di atas, dengan axial fan sebagai sumber getaran, peredamnya menggunakan rubber, meja sebagai media getaran yang akan diukur, dan handphone sebagai alat yang mendeteksi getaran.
3.3 Proses Pengumpulan Data
Proses pengumpulan data dimulai dari menyiapkan alat-alat yang diperlukan untuk melakukan pengambilan data dan telah mendownload aplikasi Phyphox. Lalu menyusun axial fan dan rubber untuk diambil datanya menggunakan aplikasi phyphox.
Setelah semua alat telah tersusun sesuai skema alat pengujian, buka aplikasi phypox dan setting dengan selang waktu pengambilan data selama 20 detik di bagian
“Experiment Duration”. Nyalakan axial fan, serta aktifkan “Start Sound” pada
“Acoustic Signals”. Kemudian tekan “Ok” dan tekan simbol segitiga pada bagian atas aplikasi untuk memulai mengambil data. Jika waktu habis, maka proses pengambilan data sudah selesai dilakukan. Berikut tabel hasil data berdasarkan pengujian yang telah dilakukan :
Tabel 3.1 Data Hasil Pengamatan
Rubber F1 F2 Fn Damping Ratio
1 41.2800 41.3280 41.3015 0.0005810926964 2 41.2045 41.2817 41.2512 0.000935730 3 41.0395 41.0823 41.0599 0.000521190
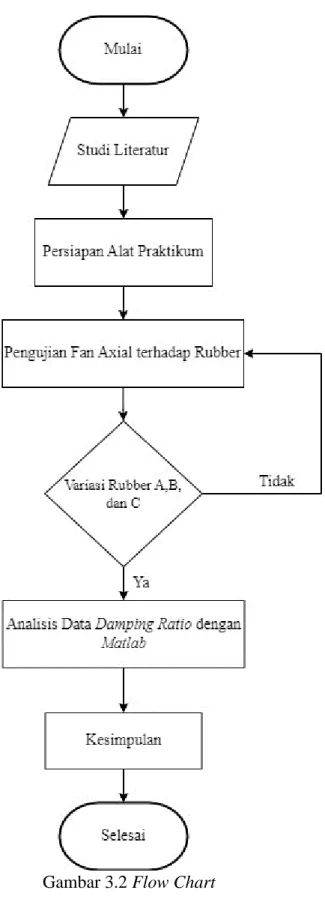
3.4 Flow Chart
Gambar 3.2 Flow Chart
BAB IV
HASIL DAN PEMBAHASAN
4.1 Hasil Data
Berikut tabel hasil data berdasarkan pengujian yang telah dilakukan : Tabel 4.1 Data Hasil Pengamatan
Rubber F1 F2 Fn Damping Ratio
1 41.2800 41.3280 41.3015 0.0005810926964 2 41.2045 41.2817 41.2512 0.000935730 3 41.0395 41.0823 41.0599 0.000521190 4.2 Analisis Data
Berdasarkan data yang telah diperoleh berdasarkan pengujian yang telah dilakukan, berikut analisis data terkait damping ratio :
4.2.1 Rubber 1
𝜁 = 𝑓2− 𝑓1 2𝑓𝑛
𝜁 = 41.3280 − 41.2800 2 × 41.3015 𝜁 = 0.0005810926964
4.2.2 Rubber 2
𝜁 = 𝑓2− 𝑓1 2𝑓𝑛
𝜁 = 41.2817 − 41.2045 2 × 41.2512 𝜁 = 0.000935730
4.2.3 Rubber 3
𝜁 = 𝑓2− 𝑓1 2𝑓𝑛
𝜁 = 41.0823 − 41.0395 41.0599 𝜁 = 0.000521190
4.3 Pembahasan
Damping ratio merupakan perbandingan frekuensi teredam dengan frekuensi natural. Damping ratio dibagi menjadi 4, yaitu undamped, underdamped, critically damped, overdamped (Katsuhiko, 1997). Dalam praktikum getaran mekanik, variabel bebas yang digunakan adalah rubber, 𝑓1 (batas bawah frekuensi), 𝑓2 (batas atas frekuensi), dan 𝑓𝑛 (frekuensi natural). Variabel terikat yang digunakan adalah damping ratio, dan variabel controlnya tidak ada. Berikut data-data tiap rubber yang telah diolah di Software Matlab :
4.3.1 Rubber 1
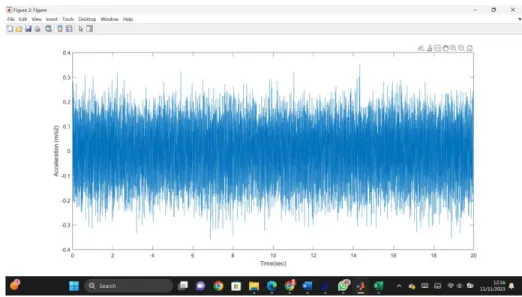
Gambar 4.1 Inputkan pemrograman untuk data mentah
Gambar 4.2 Grafik data mentah
Gambar 4.3 Inputkan pemrograman untuk hubungan antara amplitude dengan frequency
Gambar 4.4 Grafik hubungan antara amplitude dengan frequency
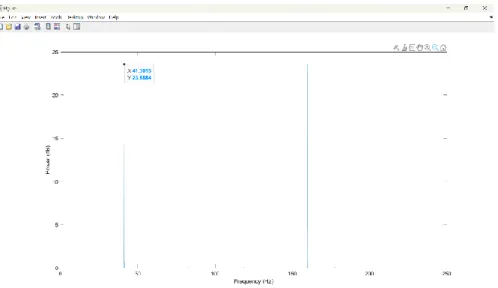
Gambar 4.5 Inputkan pemrograman untuk hubungan antara power dengan frequency
Gambar 4.6 Grafik hubungan antara power dengan frequency untuk (fn)
Gambar 4.7 Inputkan pemrograman untuk Bandwidth (f1 dan f2)
Gambar 4.8 Grafik Bandwidth
Gambar 4.9 Plotting untuk f1 pada Bandwidth
Gambar 4.10 Plotting untuk f2 pada Bandwidth
Pada pengolahan data Rubber 1 seperti gambar di atas pada Software Matlab didapatkan beberapa data seperti : 𝑓1 sebesar 41.2800; 𝑓2 sebesar 41.3280; dan untuk 𝑓𝑛 sebesar 41.3015. Dari data yang diperoleh tersebut, maka didapatkan hasil dari ζ (zeta) sebesar 0.0005810926964 dengan hasil damping ratio kurang dari 1 (ζ < 1).
Maka dapat dinyatakan dari grafik tersebut adalah Underdamped.
2.3.2 Rubber 2
Gambar 4.11 Inputkan pemrograman untuk data mentah
Gambar 4.12 Grafik data mentah
Gambar 4.13 Inputkan pemrograman untuk hubungan antara amplitude dengan frequency
Gambar 4.14 Grafik hubungan antara amplitude dengan frequency
Gambar 4.15 Inputkan pemrograman untuk hubungan antara power dengan frequency
Gambar 4.16 Grafik hubungan antara power dengan frequency untuk (fn)
Gambar 4.17 Inputkan pemrograman untuk Bandwidth (f1 dan f2)
Gambar 4.18 Grafik Bandwidth
Gambar 4.19 Plotting untuk f1 pada Bandwidth
Gambar 4.20 Plotting untuk f2 pada Bandwidth
Pada pengolahan data Rubber 2 seperti gambar di atas pada Software Matlab didapatkan beberapa data seperti : 𝑓1 sebesar 41.2045; 𝑓2 sebesar 41.2817; dan untuk 𝑓𝑛 sebesar 41.2512. Dari data yang diperoleh tersebut, maka didapatkan hasil dari ζ (zeta) sebesar 0.000935730 dengan hasil damping ratio kurang dari 1 (ζ < 1). Maka dapat dinyatakan dari grafik tersebut adalah Underdamped.
2.3.3 Rubber 3
Gambar 4.21 Inputkan pemrograman untuk data mentah
Gambar 4.22 Grafik data mentah
Gambar 4.23 Inputkan pemrograman untuk hubungan antara amplitude dengan frequency
Gambar 4.24 Grafik hubungan antara amplitude dengan frequency
Gambar 4.25 Inputkan pemrograman untuk hubungan antara power dengan frequency
Gambar 4.26 Grafik hubungan antara power dengan frequency untuk (fn)
Gambar 4.27 Inputkan pemrograman untuk Bandwidth (f1 dan f2)
Gambar 4.28 Grafik Bandwidth
Gambar 4.29 Plotting untuk f1 pada Bandwidth
Gambar 4.30 Plotting untuk f2 pada Bandwidth
Pada pengolahan data Rubber 3 seperti gambar di atas pada Software Matlab didapatkan beberapa data seperti : 𝑓1 sebesar 41.0395; 𝑓2 sebesar 41.0823; dan untuk 𝑓𝑛 sebesar 41.0599. Dari data yang diperoleh tersebut, maka didapatkan hasil dari ζ (zeta) sebesar 0.000521190 dengan hasil damping ratio kurang dari 1 (ζ < 1). Maka dapat dinyatakan dari grafik tersebut adalah Underdamped.
Jadi, dari keseluruhan pengolahan data Rubber 1, 2, dan 3 pada Software Matlab didapatkan berbagai variasi data mulai dari 𝑓1, 𝑓2, 𝑓𝑛 dan ζ (zeta). Untuk urutan perbandingan nilai ζ (zeta) dari ketiga rubber dan dinilai dari damping ratio yang paling bagus adalah rubber 3 dengan nilai ζ (zeta) sebesar 0.000521190 kemudian rubber 1 sebesar 0.0005810926964 dan yang terakhir adalah rubber 2 0.000935730.
Dari ketiga rubber tersebut, semuanya mempunyai karaktersitik damping ratio kurang dari 1 (ζ < 1) yang artinya sifat rubber tersebut adalah Underdamped.
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Kesimpulan yang didapat berdasarkan pengolahan data dan analisis data :
1. Perbandingan redaman pada fan axial dari ketiga jenis rubber yang berbeda menunjukkan perbedaan dalam nilai damping ratio. Hasil pengolahan data menunjukkan bahwa rubber 1 memiliki nilai ζ (zeta) sebesar 0.0005810926964, rubber 2 memiliki nilai ζ (zeta) sebesar 0.000935730, dan rubber 3 memiliki nilai ζ (zeta) sebesar 0.000521190. Dari hasil tersebut, dapat disimpulkan bahwa rubber 3 merupakan peredam getaran yang optimal karena memiliki nilai damping ratio yang mendekati atau kurang dari 1 (ζ < 1).
2. Metode evaluasi redaman menggunakan metode half-band power terbukti efektif dalam menganalisis getaran acak melalui kurva respons frekuensi.
Metode ini juga cocok digunakan untuk mengasumsikan rasio redaman yang kecil, sehingga dapat memberikan pemahaman yang baik terhadap karakteristik redaman pada material tertentu.
3. Penentuan rasio redaman dipengaruhi oleh beberapa faktor, yaitu alat ukur, ketelitian pengamat, dan kondisi pengujian saat pengambilan data. Faktor- faktor ini perlu diperhatikan agar hasil pengukuran dapat akurat dan dapat diandalkan.
5.2 Saran
1. Penting bagi praktikan untuk meningkatkan pemahaman mereka tentang getaran dan redaman sebelum menjalani praktikum, sehingga mereka dapat melaksanakan kegiatan praktikum dengan lebih baik.
2. Perlu diperhatikan dan ditingkatkan jumlah alat praktikum agar waktu yang digunakan menjadi lebih efisien.
3. Diinginkan agar praktikan dapat mengaplikasikan pengetahuan yang diperoleh dari praktikum ini ke dalam kehidupan nyata.
DAFTAR PUSTAKA
Ba'din, L., Daraio, C., & Sim, L. (2010). Optimal bandwidth selection for conditional efficiency measures: A data-driven approach. European Journal of Operational Research, 633–640.
Benaroya, H., Mark Nagurka, & Seon Han. (2017). Mechanical vibration: Analysis, uncertainties, and control, Mechanical Vibration: Analysis, Uncertainties, and Control. CRC Press.
Carrera, E., & Pagani, A. (2014). Free vibration analysis of civil engineering structures by component-wise models. Journal of Sound and Vibration.
Dewanto, J. (2014). Kajian Teoritik Sistem Peredam Getaran Satu Derajat Kebebasan.
Jurnal Teknik Mesin, 156 - 162.
Husen, A., & Faizal H, M. (2019). PENGUJIAN DAN ANALISIS ALAT SIMULASI GETARAN PADA RECTANGULAR BEAM DENGAN REDAMAN.
Katsuhiko, O. (1997). Modern Control Engineering. Third Edition.
Kleiman, B. (1989). Understanding natural frequency and damping and how they relate to the measurement of blood pressure. Journal of clinical monitoring 5, 137- 147.
Lee, C.-L. (2020). Proportional viscous damping model for matching frequency- dependent damping ratio. World Conference on Earthquake Engineering.
Purwanto, B., Zulfachmi, & Purwaka, P. B. (2019). Pengukuran Getaran Mekanik Berdasarkan Jenis Bangunan Mechanical Vibration Measurement Based on Building Type. Ecolab, 31-38.
Raffoul, S., Garcia, R., Pilakoutas, K., Guadagnini, M., & Medina, N. F. (2016).
Optimisation of rubberised concrete with high rubber content: An experimental investigation. Construction and Building Materials, 391–404.
Rusianto, T., & Susastriawan, A. P. (2021). Getaran Mekanis. Yogyakarta: AKPRIND PRESS.
Yadav, J., & Tiwari, S. (2017). Effect of waste rubber fibres on the geotechnical properties of clay stabilized with cement. Applied Clay Science, 149, 97-110.
Zhang, J., & Ma, Z. (2013). Adaptive Half-Band Power Filtering for Vibration Analysis of Machines Operating Under Non-Stationary Conditions. Journal of Test and Measurement Technology, 27(6), 575-578.
LAMPIRAN
Lampiran 1. Raw Data Rubber 1
Lampiran 2. Raw Data Rubber 2
Lampiran 3. Raw Data Rubber 3
Lampiran 4. Rubber 1
Lampiran 5. Rubber 2
Lampiran 6. Rubber 3
Lampiran 7. Axial Fan
Lampiran 8.Settingan Aplikasi Phyphox
Lampiran 9. Susunan alat praktikum
Lampiran 10. Proses pengambilan data Rubber 1, 2, dan 3