서 론
연구 동향
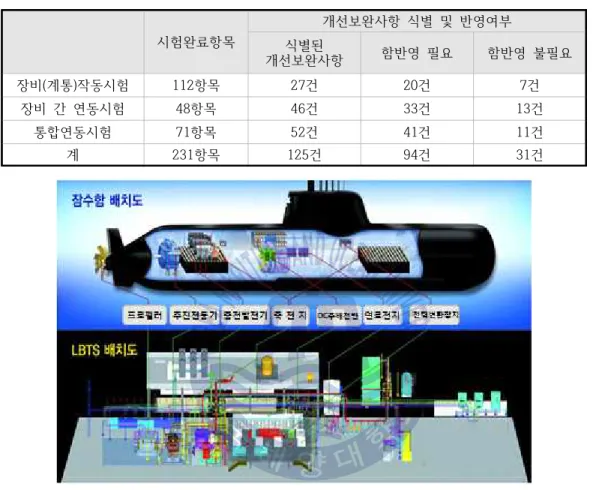
LBTS 적용 사례로, LBTS는 DDG-100 0 통합 전력 시스템, HTS(고온 슈퍼) 전도성 추진 모터 및 전기 추진 시스템의 연구 개발을 위해 설치된 장치를 검증하기 위해 제작되었습니다. 분석된 문제는 개발할 잠수함의 사전 식별 및 대응방안에 활용될 수 있습니다.

선박의 추진 시스템은 추진 엔진의 조합에 따라 달라집니다. 선박의 복합추진시스템은 추진시스템의 구성에 따라 크게 6가지 유형으로 분류할 수 있다.
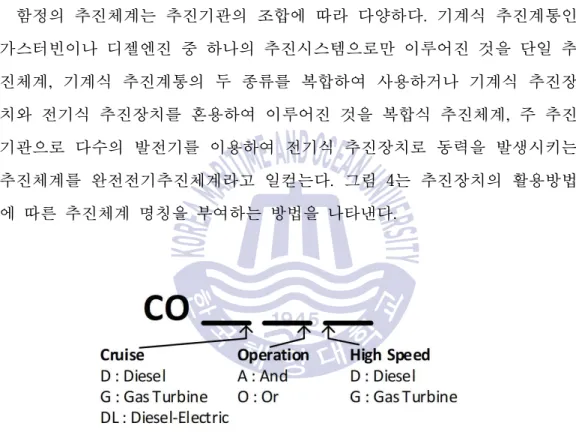
함정 추진체계
함정 추진체계 설계
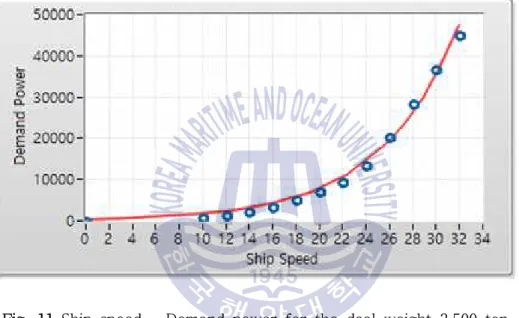
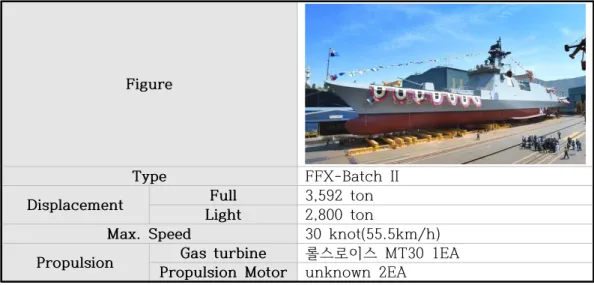
함정 모델
즉, 선박의 마찰저항은 선박 속도의 대략적인 힘에 비례하여 증가함을 알 수 있다. 지속적으로 속도를 높이기 위해서는 선박의 저항력을 넘는 추진력을 받는 것이 가능하다. 선박 모델은 위와 같은 결과를 생성하도록 설계되었습니다.
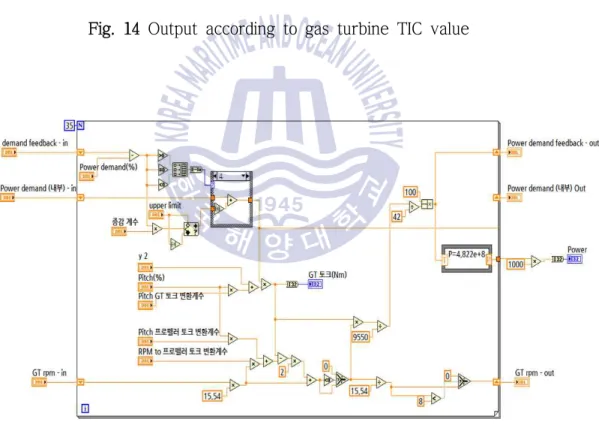
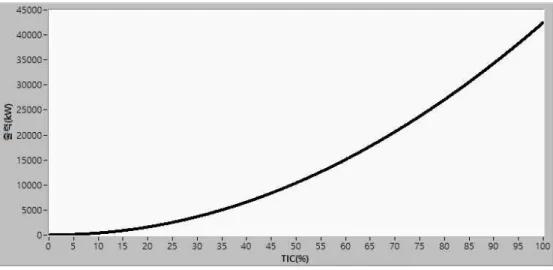
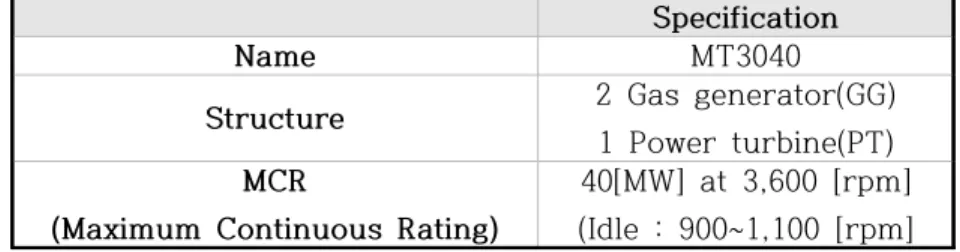
가스터빈 모델
본 가스터빈의 출력은 선박 모델에 따른 축토크[kNm]와 축회전속도[rpm]와 선박의 피치제어프로펠러(CPP)의 P/D값(피치/직경비)을 출력한다. 즉, 선박 샤프트의 회전속도와 샤프트 토크에 영향을 미치는 요소에는 선박의 TIC 값과 CPP 피치 값에 따른 가스터빈 출력이 포함된다. 가스 터빈은 TIC 값에 따라 필요한 출력 값에 따라 축 속도, 토크 및 동력 터빈 출력을 생성합니다.
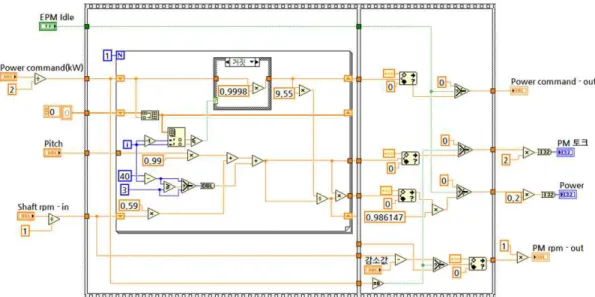
전기추진전동기 모델
가스터빈과 전기추진모터는 장비 각각의 작동특성을 예측하기 보다는 선박추진계통 전체의 연동특성과 특성을 예측하므로 오히려 제어값에 따른 제어작동 및 출력특성을 반영하도록 단순화하여 모델링한 것이다. 열역학 모델보다 계속되는 그 중 내부 제어기 모델은 제어 명령에 따른 기계적, 전기적 지연을 제공하기 위해 PID 제어기를 이용하여 시간에 따른 출력 및 속도 변화를 모델로 구현하였다.
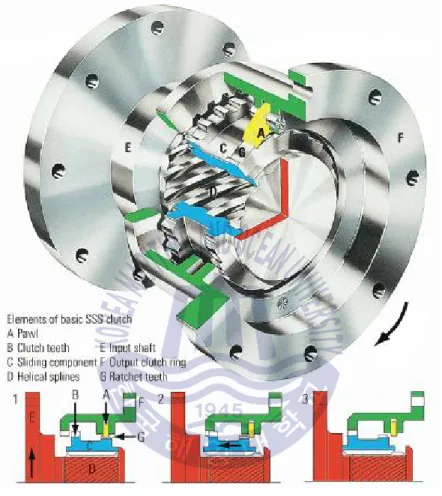
감속기어 및 클러치
E는 입력측 샤프트를 나타내며, E의 속도가 증가하면 C가 움직이고 B의 클러치가 체결됩니다. 기본적으로 주 구동 모터가 일정한 샤프트 속도에 도달할 때까지 작동되지 않습니다.
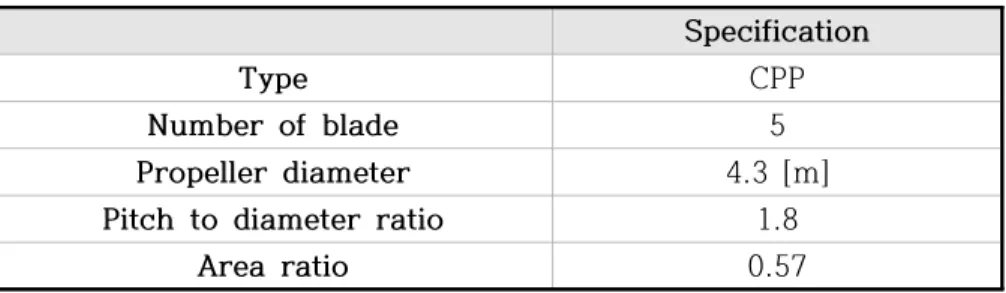
가변피치 프로펠러
가변 속도 프로펠러의 치수 계수. 여기서 는 기준속도()로부터 프로펠러 블레이드의 방향각을 의미하므로 고정속도 프로펠러의 경우 는 고정되어 있으므로 는 다항식으로 표현할 수 있으나 변수의 경우 피치스크류, 는 의 변화에 따라 스크류의 회전속도에 따라 끊임없이 변하기 때문에 표현하기 어렵다. 프로펠러 자체의 성능을 분석하기 위해서는 위의 방정식을 이용하여 프로펠러의 시뮬레이션을 수행해야 한다. 그러나 선박 추진 시스템에 대한 시뮬레이터가 개발되고 있기 때문에 가변속 프로펠러의 특성이 가정되고 있다. 표 11과 그림 21과 같이 시뮬레이션되었습니다. 계속되는
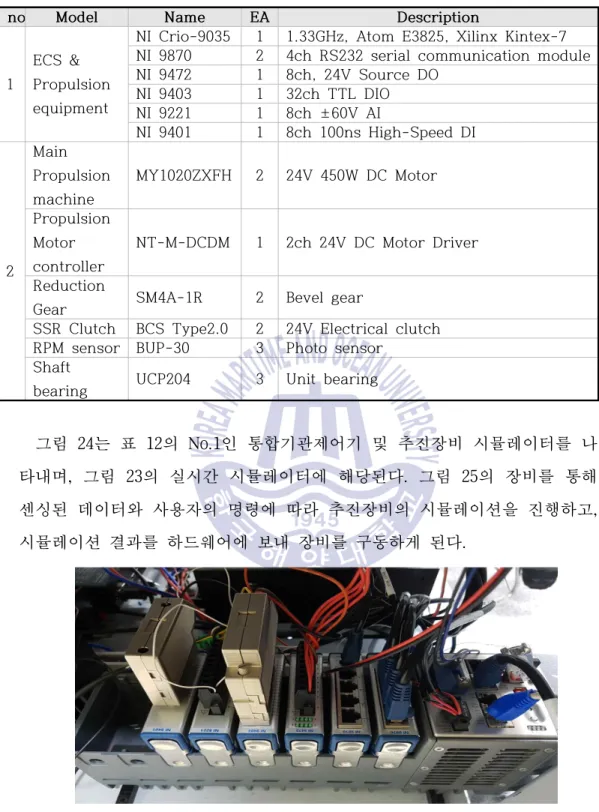
시뮬레이터 구축
NI-Crio 9035에는 Linux 기반의 리얼타임 운영체제가 탑재되어 있어 동적 시뮬레이션의 신뢰성 확보에 필수적인 시기적절한 성능을 보장할 수 있습니다. 속도는 포토 센서를 통해 측정되어 그림 24와 같은 실시간 시뮬레이터로 전송되며, 하드웨어에서 측정된 속도에 따라 목표 값에 도달하는 명령이 달라집니다. 하단의 레버는 사용자의 동작 모드에 따라 속도나 피치 값을 제어하며, 측정된 레버 값은 실시간 시뮬레이터로 전송되어 내부적으로 ECS 명령 값으로 변환되어 시뮬레이션을 이어갑니다.
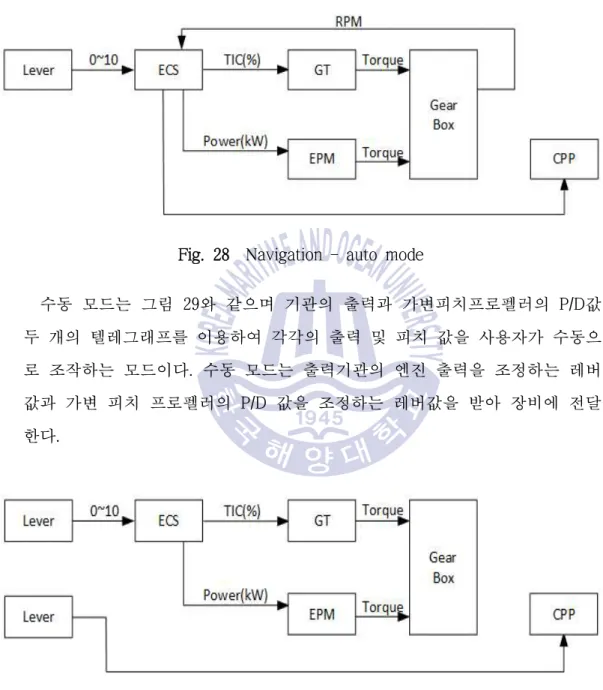
함정추진체계 운용모드
수동 모드는 도 29에 도시되어 있으며, 엔진 출력과 가변 피치 프로펠러 P/D 값을 나타내는 2개의 텔레그래프를 이용하여 사용자가 각 출력과 피치 값을 수동으로 조작하는 모드이다. 수동 모드는 출력 모터 제어 레버 값과 가변 피치 프로펠러 P/D 값의 제어 레버 값을 가져와 장치에 전달합니다.
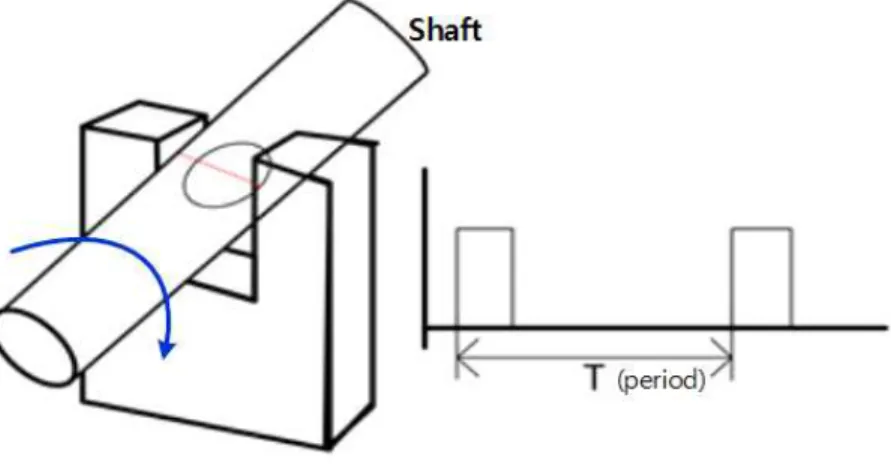
통합기관제어기
- FPGA 모델
- Telegraph 모델
- Propulsion System 모델
전기 구동 모터 샤프트의 회전 속도와 프로펠러의 피치 각도에 따른 토크. 본 연구에서 개발된 추진장비 모델과 시뮬레이터를 이용하여 가스터빈을 이용한 대상선박의 추진특성을 분석한다. 전기 구동모터의 제어 모드도 가스터빈 모드와 마찬가지로 자동 모드와 수동 모드가 있다.
추진체계 시뮬레이션
가스터빈 자동모드
본 시뮬레이션에서는 선박이 대기 모드에 있고 가스터빈 모드가 3600[ms]에서 활성화되는 것으로 가정합니다. 그런 다음 시뮬레이터의 가스터빈 샤프트의 전자 클러치를 부착하고 추력을 선박에 전달합니다. 또한, 사용자가 선박을 정지시키기 위해 전신신호 '0'을 주면 관성에 의해 선박의 추진속도가 감소하는 것이 아니라, 외부저항에 의해 속도가 감소하는 것을 알 수 있다.
가스터빈 수동모드
시뮬레이션 결과, 동일한 가스터빈 출력에서 프로펠러 피치의 값이 증가하면 회전속도는 감소하고 토크는 증가하며, 반면 가스터빈 출력은 증가 또는 감소하는 것을 알 수 있다. 피치는 고정되어 있고 토크와 샤프트 회전 속도는 함께 증가하거나 감소합니다.
전기추진전동기 자동모드
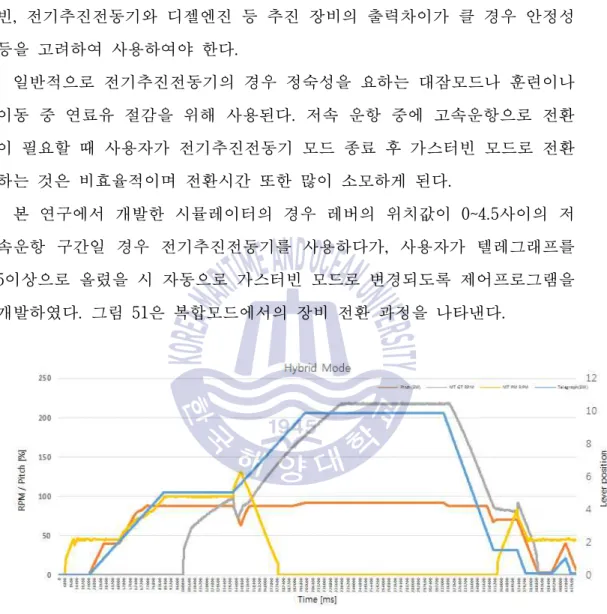
전기추진전동기 수동모드
특히, 전기구동모터와 가스터빈 등 구동장비, 전기구동모터와 디젤엔진 간의 출력 차이가 클 경우 안정성 등이 크게 떨어진다. 그것을 사용할 때 고려됩니다. 일반적으로 전기추진모터는 정숙성을 요구하는 대잠 모드나 훈련이나 이동 시 연료유 절약을 위해 사용된다. 본 논문에서는 복합추진선의 추진시스템을 검증하기 위한 연구를 수행하였다.
Navigation Mode
결 론
![Fig. 1 Increasing electrical power demands [9]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/10474667.0/15.771.91.654.249.896/fig-1-increasing-electrical-power-demands-9.webp)
![Fig. 7 Dynamic propulsion simulation, SEASTEMA[16]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/10474667.0/29.771.132.613.87.680/fig-7-dynamic-propulsion-simulation-seastema-16.webp)