isprsannals II 1 W1 33 2015
Teks penuh
Gambar

Garis besar
Dokumen terkait
It extracts the urban land cover from high resolution satellite images using just some training areas.. The proposed method is called Iterative Context Forest from Fr¨ohlich
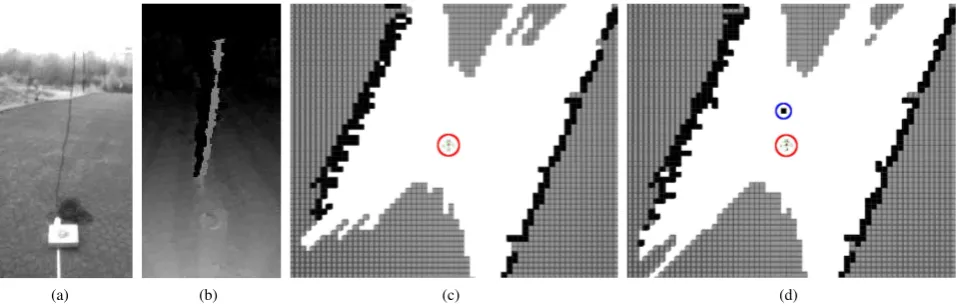
Our segmentation strategy exploits the geometric and radiometric information in three steps: extraction of the main planes using a RANSAC approach then segmentation
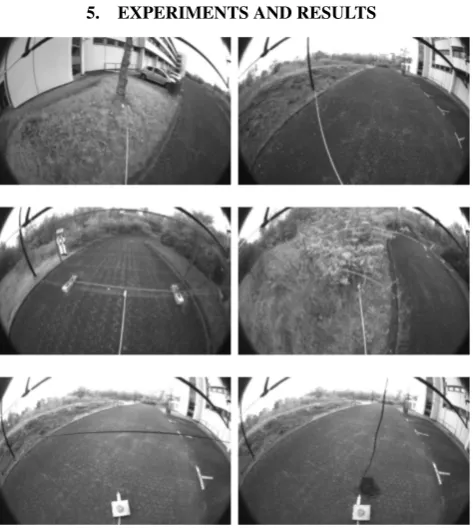
Automatic tie points, GCPs, and camera centres shown in rayCloud Editor (top) and the dense point cloud (bottom) for the 8mm dataset.. 2.4.4.2 Fisheye Lens 10 mm: This set
ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume II-5/W3, 2015 25th International CIPA Symposium 2015, 31 August – 04 September 2015,
Standard stereo matching based on imagery captured at the same point of time from the two forward looking stereo cameras (configuration 1) already provided good accuracy, which did
Next to the georeferenced strips, also the original scanner mea- surements and the trajectory data were provided. However, no a priori information about the mounting calibration
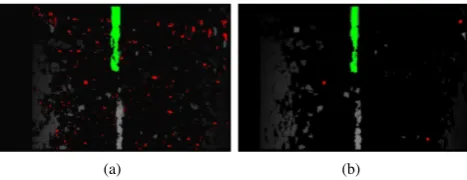
At the LIDAR point cloud, two different methods are implemented and evaluated using initially the normals and the roughness values afterwards: (1) the proposed scan
By opposition, the combined interval analysis and homotopy continuation technique calibration obtained by continuous deformation of the function mapping the
