Conference paper
Teks penuh
Gambar
Garis besar
Dokumen terkait
The detection employs extracted façade structures from images and height gradients from a projected 3D point cloud generated from that image pair.. 2.2.1 Façade structures: façade
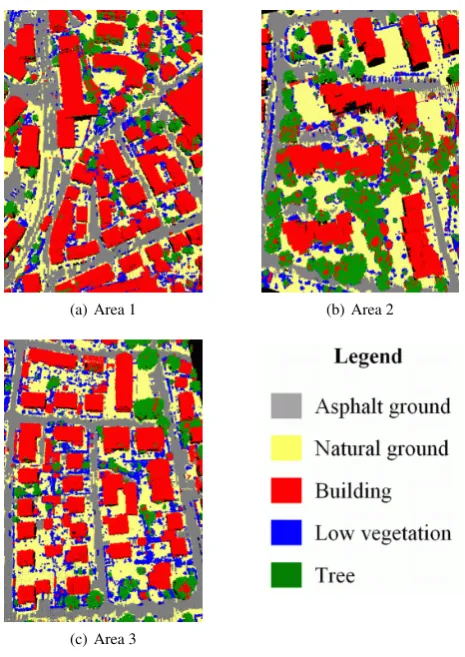
(a) Ground reference image of University of Pavia dataset (200×200 subset) with color codes for different classes, and Classification maps obtained by (b) ORCLUS, (c)
A variable object size results in different voxel spaces (voxel space definition via bounding box of the complete point cloud) with different filled voxels and volumes. That is
This paper proposes a new building detection method using a novel segmentation technique for LIDAR point cloud data cov- ering complex urban scenes.. The point cloud data is
In this paper, we present a new automatic LiDAR point cloud segmentation method using suitable seed points for building detection and roof plane extraction.. Firstly, the LiDAR
Potential use of three different vegetation indices of RapidEye imagery on crop type classification as well as individual contribution of each vegetation indices on classification
The proposed classification method adopts the random forests method to get initial probability maps of the four main classes in forest regions (high-forest, low-forest, ground,
Our research focus on CHM-based tree feature extraction and LiDAR analyst's 3D building fetaure extarction using high- resolution airborne LiDAR data and its
