PERANCANGAN DAN IMPLEMENTASI PENGENDALI
PINTU PAGAR OTOMATIS BERBASIS ARDUINO
Diajukan untuk memenuhi salah satu persyaratan dalam menyelesaikan
Pendidikan Sarjana (S-1) pada Departemen Teknik Elektro
Sub Jurusan Teknik Komputer
Oleh
NIM : 100422059 Wilfrid Sahputra Girsang
PROGRAM PENDIDIKAN SARJANA EKSTENSI
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
LEMBAR PENGESAHAN TUGAS AKHIR
PERANCANGAN DAN IMPLEMENTASI PENGENDALI PINTU PAGAR OTOMATIS BERBASIS ARDUINO
Oleh:
100422059
Tugas Akhir ini diajukan untuk melengkapi salah satu syarat untuk
memperoleh gelar Sarjana Teknik pada Wilfrid Sahputra Girsang
DEPARTEMEN TEKNIK ELEKTRO PPSE FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
Sidang pada Tanggal 5 Bulan Februari Tahun 2014 di depan penguji :
1. Ketua Penguji : Ir. Kasmir Tanjung, MT ………..
2. Anggota Penguji : Penantin Tarigan, Msc ………..
Disetujui Oleh: Pembimbing Tugas Akhir
Diketahui Oleh: Fakhruddin Rizal B, ST. MTI NIP. 19740427 200312 1 002
Ketua Departemen Teknik Elektro Fakultas Teknik USU
LEMBAR PENGESAHAN TUGAS AKHIR
PERANCANGAN DAN IMPLEMENTASI PENGENDALI PINTU PAGAR OTOMATIS BERBASIS ARDUINO
Oleh:
100422059
Tugas Akhir ini diajukan untuk melengkapi salah satu syarat untuk
memperoleh gelar Sarjana Teknik pada Wilfrid Sahputra Girsang
DEPARTEMEN TEKNIK ELEKTRO PPSE FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
Sidang pada Tanggal 5 Bulan Februari Tahun 2014 di depan penguji :
1. Ketua Penguji : Ir. Kasmir Tanjung, MT
2. Anggota Penguji : Penantin Tarigan, Msc
Disetujui Oleh:
Pembimbing Tugas Akhir
Diketahui Oleh:
Fakhruddin Rizal B, ST. MTI NIP. 19740427 200312 1 002
Ketua Departemen Teknik Elektro Fakultas Teknik USU
ABSTRAK
Tugas akhir ini membahas tentang perancang dan pengendali suatu sistem pembuka dan penutup pintu pagar rumah menggunakan mikrokontroler arduino uno. Rancangan ini diharapkan untuk diaplikasikan pada rumah – rumah yang memiliki pintu pagar yang besar dengan bobot yang berat agar dapat mempermudah pemilik rumah tersebut untuk membuka dan menutup pintu pagar. Sebagai pengendalinya digunakan tombol, RF (radio frekuensi) dan Ethernet shield untuk dapat membuka dan menutup pintu pagar tersebut. Untuk menggerakkan atau mengendalikan pintu pagar digunakan motor dan driver agar pintu pagar dapat bergeser ke kanan untuk pintu pagar terbuka dan bergeser kekiri untuk pintu pagar tertutup.
KATA PENGANTAR
Puji dan syukur penulis ucapkan kehadirat Tuhan Yang Maha Esa atas segala RahmatNya lah yang memberikan pengetahuan, kesabaran, dan kesehatan kepada penulis sehingga dapat menyelesaikan Tugas Akhir ini.
Tugas Akhir ini berjudul “PERANCANGAN DAN IMPLEMENTASI
PENGENDALI PINTU PAGAR OTOMATIS BERBASIS ARDUINO”.
Tujuan penulisan Tugas Akhir ini adalah untuk memenuhi persyaratan dalam menyelesaikan Program pendidikan Sarjana Jurusan Teknik Elektro, program studi Teknik Komputer, Universitas Sumatera Utara.
Sesuai dengan judulnya, laporan ini membahas mengenai perancangan dan pengendali sistem pembuka dan penutup pintu pagar dengan mikrokontroler arduino sehingga pintu pagar dapat terbuka dan tertutup sesuai dengan kendali yang digunakan.
Dalam menyelesaikan Tugas Akhir ini penulis banyak menerima bimbingan dan dorongan berupa pemikiran, tenaga dan waktu dari berbagai pihak. Oleh sebab itu, pada kesempatan ini penulis mengucapkan terima kasih yang sebesar-besarnya kepada:
1. Ayahanda Arbensius Girsang, S.Pd dan Ibunda Marlinang Sinaga, S.Pd tercinta selaku orangtua penulis serta kakak dan adik yang telah banyak memberikan bantuan, dorongan dan biaya serta doa pada penulis selama menjalani jenjang pendidikan hingga selesai.
3. Bapak Fakhruddin Rizal, ST, MTI, selaku Dosen Pembimbing Tugas Akhir penulis.
4. Bapak Drs. Hasdari Helmi, MT, selaku dosen wali penulis
5. Seluruh Dosen dan Staf Pegawai Departemen Teknik Elektro FT-USU. 6. Abang Yudi yang telah banyak memberikan masukan dalam
menyelesaikan tugas akhir ini.
7. Teman-teman seperjuangan penulis Elda, Yetty, Mutiara, Rati, Abang Doli, Abang Ronald, Abang Jackson, Adi, Erik, Bukry, Leo, Rinaldi, Manase yang telah memberikan masukan dan semangat kepada penulis.
Penulis menyadari bahwa Tugas Akhir ini belum sempurna, karena masih banyak kesalahan dan kekerungan. Oleh karena itu, saran dan kritik yang bersifat membangun sangat diharapkan. Akhirnya penulis berharap Tugas Akhir ini dapat bermanfaat bagi yang membacanya.
Medan, November 2013 Penulis,
DAFTAR ISI
ABSTRAK... i
KATA PENGANTAR ... ii
DAFTAR ISI ... iv
DAFTAR GAMBAR ... vii
DAFTAR TABEL ………... ix
BAB I PENDAHULUAN ... 1.1 Latar Belakang... 1
1.2 Rumusan Masalah... 2
1.3 Tujuan Penulisan... 2
1.4 Manfaat Penuliasan... 2
1.5 Batasan Masalah... 2
1.6 Metodologi Penulisan... 3
1.7 Sistematika Penulisan... 4
BAB II LANDASAN TEORI... 2.1 Sistem Otomatis... 5
2.1.1 Elemen Dasar Sistem Otomatis... 6
2.2 Arduino………... 8
2.2.1 Arduino Uno……… 11
2.3 Dfrduino Ethernet Shield... 17
2.4 433 Mhz RF KYL 1020 ... 20
2.6 Sensor Inframerah... 24
2.6.1 Adjustable Infrared…... 25
2.7 Motor DC Servo... 26
2.8 Driver Motor... 26
2.8.1 IC l293D……… 27
BAB III PERANCANGAN PERANGKAT KERAS DAN PERANGKAT LUNAK ... 3.1 Proses kerja sistem secara umum ... 29
3.2 Perancangan perangkat keras ... 31
3.2.1 Rangkaian pada sistem pertama (membuka dan menutup pintu pagar dengan tombol) ... 33
3.2.2 Rangkaian pada sistem kedua (membuka dan menutup pintu pagar dengan RF) ... 35
3.2.3 Rangkaian pada sistem ketiga ( membuka dan menutup pintu pagar dengan Ethernet Shield) ……. 40
3.3 Rangkaian pengerak motor Driver L293D ... 41
3.4 Perancangan perangkat lunak (Program) ... 42
3.4.1 Flowchart………. 43
BAB IV PENGUJIAN SISTEM ... 4.1 Metode pegujian ... 46
4.1.1 Pengujian rangkaian Tombol ………... 46
4.1.3 Pengujian rangkaian Ethernet ……… 50 4.2 Pengujian keseluruhan ... 52
BAB V KESIMPULAN DAN SARAN ...
5.1 Kesimpulan ... 54 5.2 Saran ... 55
DARTAR PUSTAKA
DAFTAR GAMBAR
Gambar 2.1 Diagram blok arduino board …...………... 9
Gambar 2.2 Arduino Uno Board ……… 11
Gambar 2.3 Piranti out Arduino Uno ….……… 12
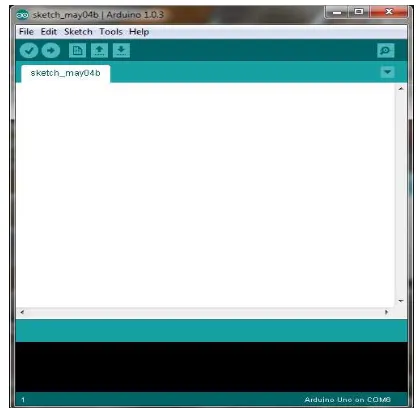
Gambar 2.4 Arduino Development Environment …………...………. 16
Gambar 2.5 Piranti out Ethernet Shield pada Arduino …...…… 18
Gambar 2.6 Ethernet Shield ………... 19
Gambar 2.7 DFRduino Ethernet shield ……….. 20
Gambar 2.8 Piranti out 433Mhz RF kit ……….. 21
Gambar 2.9 Piranti out LCD 16x2 HD44780 ... 23
Gambar 2.10 Adjustable Infrared ... 25
Gambar 2.11 Piranti IC L293D …... 28
Gambar 3.1.1 Diagram blok rancangan pada pintu pagar... 29
Gambar 3.1.2 Diagram blok rancangan pada mobil……….. 30
Gambar 3.2 Rangkaian membuka pagar dengan tombol ... 34
Gambar 3.3 Rangkaian membuka pagar dengan RF pada rumah …….. 36
Gambar 3.4 Rangkaian RF pada mobil ……….. 38
Gambar 3.5 Rangkaian membuka pagar dengan Ethernet shield ……... 40
Gambar 3.6 Rangkaian Driver L293D ………... 42
Gambar 4.1 Rangkaian tombol sebelum di tekan ……….. 47
Gambar 4.2 Rangkaian tombol ditekan.……... 47
Gambar 4.3 Rangkaian RF pada pagar ……...…………... 48
Gambar 4.4 Rangkaian pada mobil ………...………. 48
DAFTAR TABEL
ABSTRAK
Tugas akhir ini membahas tentang perancang dan pengendali suatu sistem pembuka dan penutup pintu pagar rumah menggunakan mikrokontroler arduino uno. Rancangan ini diharapkan untuk diaplikasikan pada rumah – rumah yang memiliki pintu pagar yang besar dengan bobot yang berat agar dapat mempermudah pemilik rumah tersebut untuk membuka dan menutup pintu pagar. Sebagai pengendalinya digunakan tombol, RF (radio frekuensi) dan Ethernet shield untuk dapat membuka dan menutup pintu pagar tersebut. Untuk menggerakkan atau mengendalikan pintu pagar digunakan motor dan driver agar pintu pagar dapat bergeser ke kanan untuk pintu pagar terbuka dan bergeser kekiri untuk pintu pagar tertutup.
BAB I
PENDAHULUAN
1.1 Latar Belakang
Kebutuhan yang semakin meningkat membuat setiap orang sangat tergantung pada teknologi. Banyak cara yang dilakukan untuk memenuhi kebutuhan tersebut salah satunya dengan mengaplikasikan teknologi untuk mempermudah pekerjaan. Dengan menggunakan teknologi setiap orang dapat melakukan sesuatu tanpa harus bertindak secara langsung.
Dengan menggunakan sistem pengendali pintu pagar pada suatu rumah akan diperoleh kemudah pekerjaan karena dapat membuka dan menutup pintu pagar tanpa harus bertindak secara langsung. Tiap orang yang memiliki pintu pagar yang berbobot berat dapat mengendalikan terbuka dan tertutupnya pintu pagar sesuai dengan yang diinginkan. Dalam skripsi ini diuraikan perancangan teknologi tersebut untuk dapat membuka dan menutup pintu pagar rumah.
Pagar rumah merupakan salah satu pintu masuk utama pada sebuah rumah. Sebuah pintu pagar memiliki bobot yang berat karena terbuat dari bahan logam. Dengan menggunakan teknologi ini setiap orang dapat membuka dan menutup pintu pagar yang cukup berat tanpa mengeluarkan tenaga secara langsung.
1.2 Rumusan Masalah
Dari latar belakang diatas, maka dapat diambil rumusan masalah pada Tugas Akhir ini adalah bagaimana merancang dan mengimplementasikan suatu alat pengendali pintu pagar rumah otomatis berbasis arduino agar dapat mengendalikan terbuka dan tertutupnya pintu pagar sebuah rumah.
1.3 Tujuan Penulisan
Merancang suatu alat pengendali pintu pagar rumah agar tertutup dan terbuka sesuai dengan kendali yang digunakan dengan mengeluarkan tenaga sedikit dan tidak dibatasi jarak sehingga dapat mempermudah pekerjaan manusia.
1.4 Manfaat Penulisan
Adapun manfaat penulisan tugas akhir ini adalah memberikan kemudahan kepada setiap orang yang menggunakan pagar agar dapat membuka dan menutup pintu pagar tanpa harus mengeluarkan tenaga secara langsung, terbatasi oleh waktu serta keadaan.
1.5 Batasan Masalah
Batasan masalah pada Tugas Akhir ini adalah:
2. Rancangan hanya menggunakan mikrokontroler pada ARDUINO, pada perancangannya sistem menggunakan mikrokontroler yang ada pada ARDUINO yaitu Atmega328p.
3. Perancangan tidak diimplementasikan secara nyata, rangkaian elektronik di buat menggunakan prototipe board (bread board) yaitu rangkaia pada papan ujicoba.
4. Perancangan ini diasumsikan tidak digunakan pada gedung perkantoran karena tujuan perancangan sistem yaitu untuk privasi rumah pribadi tidak untuk penggunakan fasilitas gedung umum.
5. Perancangan hanya membahas tentang sistem dan hardware yang digunakan, tidak membahas komponen yang digunakan untuk uji coba sistem.
6. Perancangan tidak membahas tentang mekanik pintu pagar.
1.6 Metodologi Penulisan
1. Tahap perancangan perangkat keras
Tahap ini melakukan perancangan rangkaian baik rangkaian minimum atau pun rancangan keseluruhan. Adapun rangkaiannya yaitu rangkaian tombol, rangkaian RF dan rangkaian Ethernet.
2. Tahap perancangan perangkat lunak
3. Tahap pengujian
Tahap ini ialah melakukan uji coba terhadap perangkat keras dan perangkat lunak agar mengetahui apakah telah sesuai dengan rancangan.
1.7 Sistematika Penulisan
Tugas akhir ini disusun berdasarkan sistematika penulisan sebagai berikut:
BAB I : PENDAHULUAN
Bab ini merupakan gambaran keseluruhan tentang apa yang diuraikan dalam Tugas Akhir ini, yaitu pembahasan tentang latar belakang, rumusan masalah, tujuan penulisan, batasan masalah, metode penulisan, dan sistematika penulisan.
BAB II : LANDASAN TEORI
Bab ini berisi teori-teori tentang penjelasan ARDUINO, sistem otomatis dan hardware lain yang digunakan.
BAB III : PERANCANGAN PERANGKAT KERAS DAN
PERANGKAT LUNAK
Bab ini membahas tentang rangkaian dan program yang digunakan oleh mikrokontroler.
BAB IV : PENGUJIAN SISTEM
Bab ini membahas tentang implementasi dan pengujian aplikasi dari hasil perancangan.
BAB V : KESIMPULAN DAN SARAN
BAB II
LANDASAN TEORI
2.1 Sistem otomatis
Sistem otomatis dapat didefinisikan sebagai suatu teknologi yang dapat menggerakkan sebuah perangkat alat dengan sendirinya tanpa ada bantuan dari luar. Sistem ini berkaitan dengan aplikasi mekanik, elektronik dan sistem yang berbasis mikrokontroler (PLC atau komputer). Semuanya bergabung menjadi satu untuk memberikan fungsi terhadap sistem rancangan penggerak (mekanik) sehingga akan memiliki fungsi tertentu.
Dalam sistem otomatis mikrokontroler memiliki fungsi yang sangat penting yaitu sebagai pengendali dalam sistem otomatis tersebut. Mikrokontroler diprogram agar dapat mengendalikan aplikasi mekanik sedangkan aplikasi elektronik digunakan untuk mikrokontroler agar dapat bekerja.
2.1.1 Elemen dasar sistem otomatis
Terdapat tiga elemen dasar yang menjadi syarat mutlak bagi sistem otomatis, yaitu sumber tegangan (power), Instruksi program (program of instruction) dan kontrol sistem, yang kesemuanya untuk mendukung proses dari sistem otomatis tersebut.
a. Sumber tegangan atau Power
Sumber tegangan atau bisa dikatakan sumber energi dari sistem otomatis berfungsi untuk menggerakan semua komponen dari sistem otomatis. Sumber energi bisa menggunakan energi listrik, baterai, ataupun Accu, semuanya tergantung dari tipe sistem otomatis itu sendiri.
b. Baris – baris program
Proses kerja dari sistem otomatis mutlak memerlukan sistem kontrol baik menggunakan mekanis, elektronik ataupun komputer. Untuk program instruksi / perintah pada sistem kontrol mekanis maupun rangkaian elektronik tidak menggunakan bahasa pemrograman dalam arti sesungguhnya, karena sifatnya yang analog. Untuk sistem kontrol yang menggunakan mikrokontroler dan keluarganya (PLC maupun komputer) bahasa pemrograman merupakan hal yang wajib ada.
Bahasa pemrograman akan memberikan perintah pada mikrokontroler dengan perantara driver sebagai penguat tegangan. Perintah seperti “out”, “outport” ,”out32” sebenarnya hanya memberikan perintah untuk sekian millidetik berupa arus pada penggerak yang kemudian akan diperkuat tegangannya.
dirancang, Bahasa program ini merupakan antarmuka antara pengguna dengan sistem. Translator atau kompiler untuk bahasa pemrograman tertentu akan mengubah statemen-statemen dari pemrogram menjadi informasi yang dapat dimengerti oleh komputer.
Instruksi komputer merupakan perintah yang digunakan perangkat keras mikrokontroler agar bekerja sesuai dengan rancangan. Mikrokontroler menggunakan instruksi tersebut untuk mendefinisikan urutan operasi yang akan dieksekusi. Sistem operasi berfungsi untuk mengkoor-dinasi interaksi program, mengatur kerja dari perangkat lunak yang digunakan untuk memprogram dari perangkat keras yang bervariasi, serta operasi dari unit masukan/keluaran.
Mikrokontroler merupakan salah satu produk teknologi tinggi yang dapat melakukan hampir semua pekerjaan, tetapi mikrokontroler merupakan barang mati tanpa adanya bahasa pemrograman untuk menggambarkan apa yang kita kerjakan, sistem bilangan untuk mendukung komputasi, dan matematika untuk menggambarkan prosedur komputasi yang kita kerjakan.
c. Sistem kontrol (Mikrokontroler)
Sistem kontrol sederhana dapat ditemukan dari berbagai macam peralatan yang dijumpai, diantaranya:
Setiap toilet memiliki mekanisme kontrol untuk mengisi ulang tangki air dengan pengisian sesuai dengan kapasitas dari tangki tersebut. Mekanisme sistem kontrol tersebut menggunakan peralatan mekanis yang disusun sedemikian rupa sehingga membentuk sistem otomatis.
AC atau air conditioner merupakan sistem otomatis yang menggunakan sistem kontrol mikrokontroler atau yang sering disebut komputer sederhana. Robot assembly contoh sistem otomatis yang menggunakan kontrol sistem
komputer atau keluarganya. Sistem kontrol tersebut akan memberikan pengaturan pada gerakan-gerakan tertentu untuk menyusun suatu peralatan pada industri.
2.2 Arduino
Arduino merupakan perangkat keras modul yang di rangkai untuk dapat mengontrol sesuatu kegiatan. Arduino merupakan kumpulan komponen yang terdiri dari mikrokontroler sebagai komponen utama. Arduino dikatakan sebagai sebuah platform dari physical computing yang bersifat open source. Arduino tidak hanya sebuah alat pengembangan, tetapi kombinasi dari hardware, bahasa pemrograman Integrated Development Environment (IDE) yang canggih.
modul-modul pendukung (sensor, tampilan, penggerak dan sebagainya) yang dibuat oleh pihak lain untuk bisa disambungkan dengan Arduino.
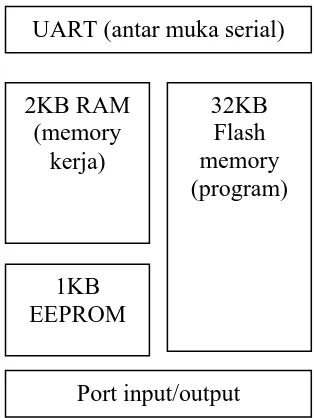
Komponen utama di dalam papan Arduino adalah sebuah mikrokontroler 8 bit dengan merk ATmega yang dibuat oleh perusahaan Atmel Corporation. Berbagai papan Arduino menggunakan tipe ATmega yang berbeda-beda tergantung dari spesifikasinya, sebagai contoh Arduino Uno menggunakan ATmega328 sedangkan Arduino Mega 2560 yang lebih canggih menggunakan ATmega2560. Untuk memberikan gambaran mengenai apa saja yang terdapat di dalam sebuah mikrokontroller, pada gambar berikut ini diperlihatkan contoh diagram blok sederhana dari mikrokontroler ATmega328 (dipakai pada Arduino Uno).
Gambar 2.1 Diagram Blok arduino board Blok-blok diatas dijelaskan sebagai berikut:
Universal Asynchronous Receiver/Transmitter (UART) adalah antar muka yang digunakan untuk komunikasi serial seperti pada RS-232, RS-422 dan RS-485.
UART (antar muka serial)
2KB RAM pada memory kerja bersifat volatile (hilang saat daya dimatikan), digunakan oleh variable-variabel di dalam program.
32KB flash memory bersifat non-volatile, digunakan untuk flash memory juga menyimpan bootloader. Bootloader adalah program inisialisasi yang ukurannya kecil, dijalankan oleh CPU saat daya dihidupkan.
1KB EEPROM bersifat non-volatile.
Piranti input/output, piranti untuk menerima data (input) digital atau analog, dan mengeluarkan data (output) digital atau analog.
Software Arduino yang digunakan adalah driver dan IDE, walaupun masih ada beberapa software lain yang sangat berguna selama pengembangan Arduino. IDE Arduino adalah software yang sangat canggih ditulis dengan menggunakan Java. IDE Arduino terdiri dari:
Editor program, sebuah window yang memungkinkan pengguna menulis dan mengedit program dalam bahasa Processing.
Compiler, sebuah modul yang mengubah kode program (bahasa program C) menjadi kode biner. Bagaimanapun sebuah mikrokontroller tidak akan bisa memahami bahasa C. Yang bisa dipahami oleh mikrokontroller adalah kode biner. Itulah sebabnya compiler diperlukan dalam hal ini.
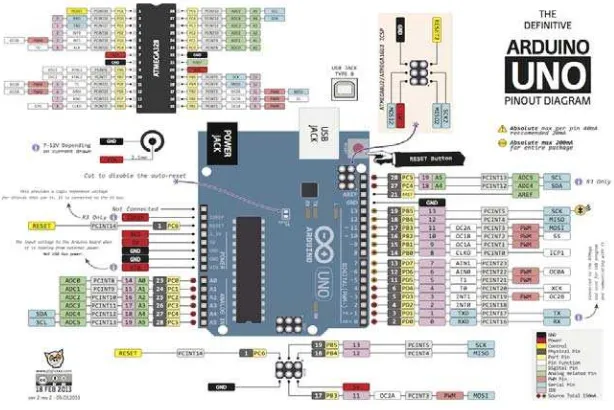
2.2.1 Aduino Uno
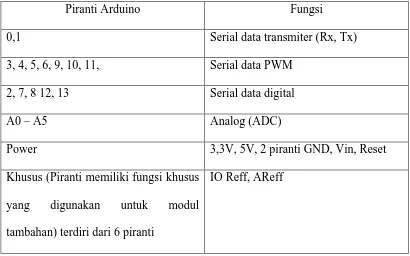
Arduino Uno adalah board berbasis mikrokontroler pada ATmega328 .Board ini memiliki 28 piranti yaitu 14 digital input / output, 6 input / output analog , 6 piranti power. Berikut merupakan table piranti Arduino:
Piranti Arduino Fungsi
0,1 Serial data transmiter (Rx, Tx)
3, 4, 5, 6, 9, 10, 11, Serial data PWM 2, 7, 8 12, 13 Serial data digital
A0 – A5 Analog (ADC)
Power 3,3V, 5V, 2 piranti GND, Vin, Reset
Khusus (Piranti memiliki fungsi khusus yang digunakan untuk modul tambahan) terdiri dari 6 piranti
IO Reff, AReff
Gambar 2.2.1 Tabel piranti Arduino
Gambar 2.2. Arduino Uno Board
mendukung mikrokontroler. Untuk menggunakannya arduino dihubung ke komputer dengan kabel USB atau sumber tegangan yang bisa didapat dari adaptor AC-DC atau baterai. Berikut merupakan table dari mikrokontroler yang ada pada arduino.
Mikrokontroller Atmega328 Input Voltage
(Rekomendasi)
7-12 V
Input Voltage (limits)
6-20 V
I/O 14 piranti (6 piranti untuk PWM)
Arus 50 mA
Flash Memory 32KB
Bootloader SRAM 2 KB
EEPROM 1 KB
Kecepatan 16 Mhz
Operasi Voltage 5V
Tabel 2.2.2 Spesifikasi Atmega328-P
Arduino uno dapat diaktifkan melalui koneksi USB atau dengan catu daya eksternal. Eksternal (non- USB) daya berasal dari AC-DC adaptor atau baterai. Adaptor ini dapat dihubungkan dengan cara menghubungkannya ke external daya konektor yang ada pada board arduino yaitu jack power dengan ukuran 2,1mm. Keluaran dari baterai atau adaptor dapat diperoleh dari piranti Gnd dan Vin dari konektor Power. Board dapat beroperasi pada daya 6 - 20 volt, Jika diberikan daya kurang dari 7V piranti 5V akan menyuplai kurang dari 5 volt dan board mungkin tidak stabil. Jika menggunakan lebih dari 12V, regulator tegangan bisa panas dan merusak board. Rentang yang dianjurkan adalah 7 - 12 volt. Berikut merupakan beberapa hal yang ada pada board arduino:
VIN
Tegangan input ke board Arduino ketika menggunakan sumber daya eksternal dapat ditambah dengan menggunakan piranti ini. Sambungkan piranti ini dengan sumber tegangan lain sehingga tegangan output arduino dapat meningkat.
5V
Merupakan output 5V dari power arduino yang dapat digunakan untuk komponen lain seperti sensor, motor dan dll. Output ini berasal dari vin USB atau power adaptor external arduino juga dari piranti vin.
3,3V
Merupakan output 3,3Volt yang digunakan untuk menghidupkan komponen dengan tegangan rendah seperti led, diver motor dll. pasokan yang dihasilkan oleh regulator on-board dan Menarik arus maksimum adalah 50 mA.
GND
Memory
ATmega328 ini memiliki 32 KB dengan 0,5 KB digunakan untuk loading file. Atmega ini juga memiliki 2 KB dari SRAM dan 1 KB dari EEPROM
Input & Output
Masing-masing dari 14 piranti digital pada Arduino Uno dapat digunakan sebagai input atau output, menggunakan fungsi portMode(), digitalWrite(), dan digitalRead(). Mereka beroperasi di 5 volt. Setiap piranti dapat memberikan atau menerima maksimum 40 mA dan memiliki resistor pull-up internal dari 20-50 K.
Berikut beberapa penjelasan piranti beserta fungsi khususnya: Serial
0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan mengirimkan (TX) data TTL serial. piranti ini terhubung ke piranti yang sesuai dari chip ATmega8U2 USB-to-Serial TTL.
Eksternal Interupsi
2 dan 3. piranti ini dapat dikonfigurasi untuk memicu interupsi pada nilai yang rendah, pada programnya dideklarasikan dengan attachInterrupt ().
PWM
3, 5, 6, 9, 10, dan 11. Menyediakan 8-bit output PWM dengan analogWrite () fungsi.
SPI
LED
Ada built-in LED terhubung ke piranti digital 13. Ketika piranti bernilai TINGGI, LED menyala, ketika piranti bernilai RENDAH, itu off.
TWI (Two wire interface)
A4 atau SDA piranti dan A5 atau SCL piranti. Mendukung komunikasi TWI Aref
Referensi tegangan untuk input analog. Digunakan dengan analogReference (). Reset
Digunakan untuk merest program yang dijalankan arduino kembali keawal program.
Otomatis Software Reset
Tombol reset Uno Arduino dirancang untuk menjalankan program yang tersimpan didalam mikrokontroller dari awal. Tombol reset terhubung ke Atmega328 melalui kapasitor 100nf.
Arduino uno memiliki 6 input analog, diberi label A0 sampai A5, yang terdiri dari 6 piranti dan Secara default sistem memiliki tegangan 5 volt.
akan dikirim ke board Arduino. RX dan TX LED di board akan berkedip ketika data sedang dikirim melalui chip USB-to-serial dan koneksi USB ke komputer. ATmega328 ini juga mendukung komunikasi I2C (TWI) dan SPI. Fungsi ini digunakan untuk melakukan komunikasi inteface pada sistem.
Uno Arduino dapat diprogram dengan perangkat lunak Arduino. Pilih Arduino Uno dari Tool lalu sesuaikan dengan mikrokontroler yang digunakan. Pada ATmega328 pada Uno Arduino memiliki bootloader yang memungkinkan untuk meng-upload program baru untuk itu tanpa menggunakan programmer hardware eksternal. Ini berkomunikasi menggunakan protokol dari bahas C. Sistem dapat menggunakan perangkat lunak FLIP Atmel (Windows) atau programmer DFU (Mac OS X dan Linux) untuk memuat firmware baru. Atau Anda dapat menggunakan header ISP dengan programmer eksternal.
Beberapa fungsi tombol pada software programming arduino:
Verify : tombol yabg berfungsi untuk melihat error pada code program yang telah dibuat sebelum diupload
Upload : Tombol yang berfungsi untuk mengkomplike code program dan mengisikan ke micro Arduino
New : Tombol untuk membuat tampilan baru dari Sketch untuk menulis code program
Open : Tombol yang digunakan untuk membuka file yang berisi program dasar Arduino
Save : Digunakan untuk save code program yang telah ditulis.
Serial monitor : Membuka serial monitor yang dapat digunakan untuk melihat hasil jalannya program yg dibuat.
Lingkungan open-source Arduino memudahkan untuk menulis kode dan meng-upload ke board Arduino. Ide ini berjalan pada Windows, Mac OS X, dan Linux. Berdasarkan Pengolahan, avr-gcc, dan perangkat lunak sumber terbuka lainnya.
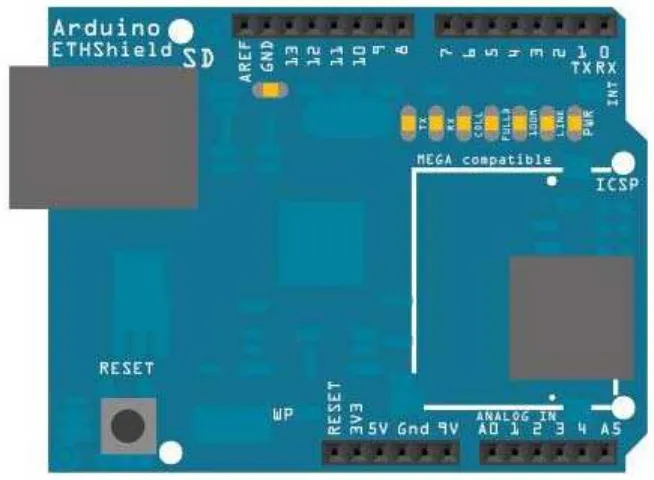
2.3 Dfrduino Ethernet shield
secara simultan. Untuk memprogramnya digunakan library Ethernet agar dapat terhubung ke internet. Shield Ethernet ini terhubung ke sebuah papan Arduino dengan menempelkannya diatas arduino tersebut. Walaupun begitu piranti arduino tetap dapat digunakan.
Pada ethernet shield terdapat sebuah slot micro-SD, yang dapat digunakan untuk menyimpan file yang dapat diakses melalui jaringan. Onboard micro-SD card reader diakses dengan menggunakan SD library.
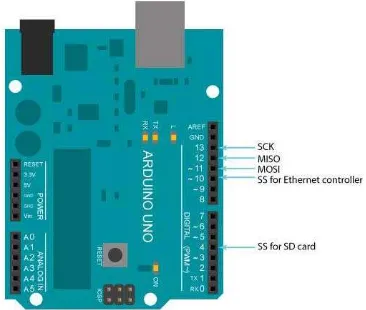
Gambar 2.5 Piranti out Ethernet Shield pada Arduino
Piranti digital 10 digunakan untuk memilih W5100 dan piranti digital 4 digunakan untuk memilih SD card. Piranti yang sudah disebutkan sebelumnya tidak dapat digunakan untuk input/output umum ketika kita menggunakan ethernet shield.
Karena W5100 dan SD card berbagi bus SPI, hanya salah satu yang dapat aktif pada satu waktu. Jika kita menggunakan kedua perangkat dalam program, hal ini akan diatasi oleh library yang sesuai.
Jika tidak menggunakan salah satu perangkat SD card atau SPI dalam program, perlu secara eksplisit men-deselect-nya. Untuk melakukan hal ini pada SD card, set piranti 4 sebagai output dan logika tinggi, sedangkan untuk W5100 yang digunakan adalah piranti 10.
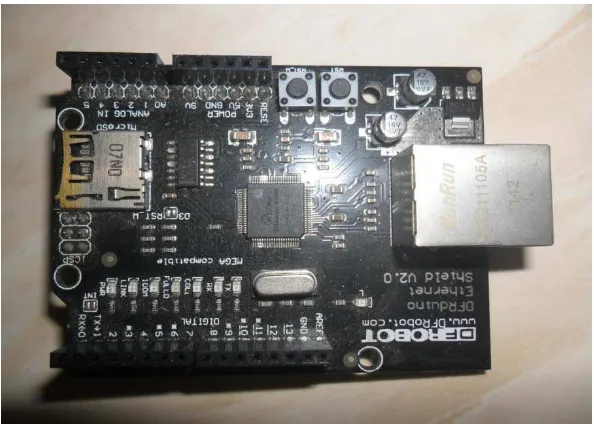
DFRduino Ethernet shield adalah sebuah clone dari arduino Ethernet shield yang dibuat oleh DFRobot. Penampakan DFRduino Ethernet shield dapat dilihat pada Gambar.
Gambar 2.7 DFRduino Ethernet shield
Hal – hal mengenai Ethernet Shield:
Shield ini menyediakan ethernet jack RJ45 standar.
Tombol reset pada shield Ethernet dapat digunakan untuk mereset W5100 dan Arduino.
Shield Ethernet berisi sejumlah informasi LED:
PWR : mengindikasikan bahwa Shield Ethernet ON atau OFF
LINK : menunjukkan adanya hubungan jaringan dan berkedip ketika Shield mentransmisikan atau menerima data
FULLD: menunjukkan bahwa koneksi jaringan full duplex 100M : mengindikasikan adanya Mb / s koneksi jaringan
2.4433 Mhz RF KYL 1020
reciver dan transmitter. Serial RF transceiver ini menggunakan data serial dan memiliki multichannel yang support TTL, RS232, RS458 dan untuk menggunakan tinggal pilih salah satunya, untuk gambar dapat dilihat dibawah ini.
Gambar 2.8 piranti out 433Mhz RF kit Fungsi dari tiap piranti :
Piranti 1 = GND/ Power Ground
Piranti 2 = VCC./ Power DC (3V – 5,5V)
Piranti 3 = RXD / TTL (Data Receive/ TTL Level) Piranti 4 = TXD / TTL (Data Transmission/ TTL Level) Piranti 5 = DGND (Sinyal Ground)
Piranti 6 = A(TXD) RS485 A or TXD of RS-232 Piranti 7 = B(RXD) RS485 B or RXD of RS-232 Piranti 8 = Sleep Kontrol
Piranti 9 = Test (Internel Testing)
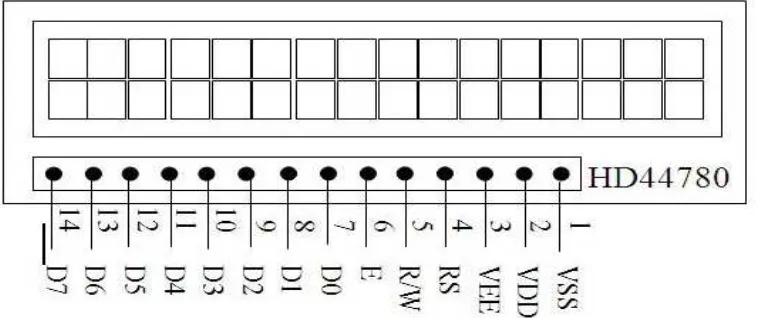
2.5LCD (Liquid Crystal Display)
Display elektronik adalah salah satu komponen elektronika yang berfungsi sebagai tampilan suatu data, baik karakter, huruf ataupun grafik. LCD (Liquid Cristal Display) adalah salah satu jenis display elektronik yang dibuat dengan teknologi CMOS logic yang bekerja dengan tidak menghasilkan cahaya tetapi memantulkan cahaya yang ada di sekelilingnya terhadap front-lit atau mentransmisikan cahaya dari back-lit. LCD (Liquid Cristal Display) berfungsi sebagai penampil data baik dalam bentuk karakter, huruf, angka ataupun grafik.
LCD adalah lapisan dari campuran organik antara lapisan kaca bening dengan elektroda transparan indium oksida dan lapisan elektroda pada kaca belakang. Ketika elektroda diaktifkan dengan medan listrik (tegangan), molekul organik yang panjang dan silindris menyesuaikan diri dengan elektroda dari segmen. Lapisan LCD memiliki polarizer cahaya vertikal depan dan polarizer cahaya horisontal belakang yang diikuti dengan lapisan reflektor. Cahaya yang dipantulkan tidak dapat melewati molekul-molekul yang telah menyesuaikan diri dan segmen yang diaktifkan terlihat menjadi gelap dan membentuk karakter data yang ingin ditampilkan.
Dalam modul LCD (Liquid Cristal Display) terdapat mikrokontroler yang berfungsi sebagai pengendali tampilan karakter LCD (Liquid Cristal Display). Mikrokontroler pada suatu LCD (Liquid Cristal Display) dilengkapi dengan memori dan register. Memori yang digunakan microcontroler internal LCD adalah:
CGRAM (Character Generator Random Access Memory) merupakan memori untuk menggambarkan pola sebuah karakter dimana bentuk dari karakter dapat diubah-ubah sesuai dengan keinginan.
CGROM (Character Generator Read Only Memory) merupakan memori untuk menggambarkan pola sebuah karakter dimana pola tersebut merupakan karakter dasar yang sudah ditentukan secara permanen oleh pabrikan pembuat LCD (Liquid Cristal Display) tersebut sehingga pengguna tinggal mangambilnya sesuai alamat memorinya dan tidak dapat merubah karakter dasar yang ada dalam CGROM.
Register control yang terdapat dalam suatu LCD adalah:
Register perintah yaitu register yang berisi perintah-perintah dari mikrokontroler ke panel LCD (Liquid Cristal Display) pada saat proses penulisan data atau tempat status dari panel LCD (Liquid Cristal Display) dapat dibaca pada saat pembacaan data.
Piranti, kaki atau jalur input dan kontrol dalam suatu LCD (Liquid Cristal Display) diantaranya adalah:
Piranti data adalah jalur untuk memberikan data karakter yang ingin ditampilkan menggunakan LCD (Liquid Cristal Display) dapat dihubungkan dengan bus data dari rangkaian lain seperti mikrokontroler dengan lebar data 8 bit.
Piranti RS (Register Select) berfungsi sebagai indikator atau yang menentukan jenis data yang masuk, apakah data atau perintah. Logika low menunjukan yang masuk adalah perintah, sedangkan logika high menunjukan data.
Piranti R/W (Read Write) berfungsi sebagai instruksi pada modul jika low tulis data, sedangkan high baca data.
Piranti E (Enable) digunakan untuk memegang data baik masuk atau keluar.
Piranti VLCD berfungsi mengatur kecerahan tampilan (kontras) dimana piranti ini dihubungkan dengan trimpot 5 Kohm, jika tidak digunakan dihubungkan ke ground, sedangkan tegangan catu daya ke LCD sebesar 5 Volt.
2.6Sensor Inframerah
Metode langsung, dimana infrared langsung dibiaskan layaknya rangkaian led biasa
Metode dengan pemberian pulsa, metode ini mengacu pada kurva karateristik infrared tersebut.
Metode kedua masih rentan terhadap gangguan frekuensi dari luar, untuk dapat menggunakannya dibuat menggunakan teknik modulasi dimana ada dua frekuensi yang digunakan yaitu frekuensi untuk pembawa dan frekuensi data.
2.6.1 Adjustable Infrared
Merupakan sensor inframerah yang di dalam modulnya terdapat penerima dan pemancar inframerah. Sensor ini memiliki jarak jangkau adjustable (dapat disesuaikan) yaitu antara 3cm – 80cm dengan sistem kerja akan menghasilkan nilai tinggi atau 1 ketika tidak terkena hambatan dan akan bernilai rendah atau 0 ketika terkena hambatan pada aliran cahayanya.
Gambar 2.10 Adjustable Infrared
2.7Motor DC servo
Motor DC merupakan perangkat yang berfungsi merubah besaran listrik
menjadi besaran mekanik. Prinsip kerja motor didasarkan pada gaya elektromagnetik.
Motor DC bekerja bila mendapatkan tegangan searah yang cukup pada kedua
kutubnya. Tegangan ini akan menimbulkan induksi elektromagnetik yang
menyebabkan motor berputar. Secara umum, kecepatan putaran poros motor DC akan
meningkat seiring dengan meningkatnya tegangan yang diberikan. Motor DC tidak
dapat dikendalikan langsung oleh mikrokontroler, karena kebutuhan arus yang besar
sedangkan keluaran arus dari mikrokontroler sangat kecil. Driver motor merupakan
alternatif yang dapat digunakan untuk menggerakkan motor DC.
2.8 Driver motor DC
Driver motor adalah sirkuit elektronika yang memungkinkan tegangan dan arus mengalir ke arah beban atau motor DC secara benar artinya dapat mengatur arah putaran motor DC sesuai dengan keinginan. Di dalam IC driver motor berisi empat buah driver-H yang berfungsi sebagai pengatur arus listrik secara dua arah. Berikut jenis IC yang berfungsi sebagai driver motor.
IC L298D IC L293D
mengatur arah putar dan disediakan piranti untuk input yang berasal dari PWM untuk mengatur kecepatan motor DC.
2.8.1 IC L293D
Merupakan IC driver untuk motor DC yang paling bayak dipasaran dan digunakan. IC ini memiliki kemampuan untuk mengendalikan dua motor. Memiliki 16 kaki piranti yang 4 diantaranya adalah untuk GND dan VCC dari tiap motor DC yang dikendalikan, memiliki kemampuan 600mA arus keluaran, memiliki arus keluaran tertinggi 1,2A , input tegangan logika “0” sampai dengan 1,5V. Gambar dan spesifikasi maximum dari IC dapat dilihat dibawah ini.
Simbol Parameter Value Unit
VS Supply Voltage 36 V
Io Peak Output Current
(100 ms non
Tstg, Tj Storage and Junction
Temperature
– 40 to 150 °C
Gambar 2.11 piranti IC L293D Fungsi dari tiap piranti:
1,2 EN, 3,4 EN: digunakan untuk mengaktifkan motor yang akan dikontrol 1A, 2A, 3A, 4A : digunakan untuk input sinyal kendali motor
Vcc1, Vcc2 : digunakan untuk member tegangan pada IC dan Motor GND, Head Sink : merupakan Ground dan dapat dihubungkan ke
BAB III
PERANCANGAN PERANGKAT KERAS
DAN PERANGKAT LUNAK
3.1Proses Kerja Sistem Secara Umum
Pada tahap perancangan secara umum ada tiga sistem yang di hubungkan ke mikrokontroler yaitu sistem tombol, sistem RF, sistem Ethernet. Arduino uno (mikrokontroler ATmega 328-P) digunakan untuk mengendalikan motor melalui driver agar dapat berputar ke kanan untuk membuka pintu pagar dan kekiri untuk menutup pintu pagar. Berikut ini merupakan gambaran diagram blok dari rancangan yang akan dibuat.
Gambar 3.1.1 Diagram blok rancangan pada pintu pagar
Pada diagram blok dibawah merupakan rancangan yang akan dibuat pada mobil untuk dapat berkomunikasi melalui RF dipagar yaitu pada sistem kedua gambar
Gambar 3.1.2 Diagram blok rancangan pada mobil
Blok diatas merupakan gambaran secara umum rancangan dari keseluruhan sistem. Pada diagram blok pertama terdiri dari tiga sistem yaitu sistem pertama membuka pintu pagar dengan tombol yang terdiri dari dua tombol yaitu untuk ON dan OFF, tombol pertama yaitu ON digunakan untuk membuka pintu pagar, ketika tombol ini ditekan maka pintu pagar akan membuka atau mikro arduino uno akan memberikan perintah kepada diver untuk menggerakkan motor kearah kanan yang membuat pagar bergeser hingga membuka, tombol kedua OFF digunakan untuk menutup pintu pagar ketika tombol ini ditekan maka pintu pagar akan menutup.
Sistem kedua yaitu membuka pintu pagar secara otomatis dengan menggunakan RFM (Radio Frekuensi Modulasi). Rancangan ini menggunakan pemancar RF dan Penerima RF yang dalam satu modul dapat bekerja sebagai penerima dan pemancar (Transciver). Pada pagar dibuat modul RF yang dapat mengirim secara simultan sinyal sejauh tiga meter dan pada mobil dibuat penerima yang dapat menerima sinyal yang di pancarkan oleh pagar. Sehingga kedua RF ini saling berkomunikasi memberi perintah untuk membuka pintu pagar pada jarak tiga meter.
Sistem ketiga yaitu membuka dan menutup pintu pagar melalui browser internet yang dapat di akses dari handphone, Tablet PC dan alat komunikasi lainnya yang dapat terkoneksi internet. Sistem ini menggunakan Ethernet yang
Mikro Atmega
328-p
IPnya telah di setting untuk dapat di akses melalui browser yang kemudian dapat membuka pintu pagar dengan menekan tombol buka untuk membuka pintu pagar atau menutup pintu pagar dengan menekan tombol tutup pada browser.
Sedangkan pada diagram blok kedua terdiri dari RF, mikrokontroler Atmega 328-p dan LCD yang merupakan rancangan pada mobil yang terpisah dari blok rancangan pertama. Rangkaian ini sebagai penerima (reciver) sinyal RF dari pagar agar pintu pagar terbuka dengan otomatis. Ketika mobil datang rangkaian RF pada mobil dan pagar saling berkomunikasi untuk dapat membuka pintu pagar. Rangkaian ini menggunakan mikrokontroler Atmega 328-p sebagai pengendalinya dan RF sebagai komunikasinya.
3.2Perancangan Perangkat Keras
Rangkaian pagar otomatis merupakan rangkaian yang dapat membuka dan menutup pintu pagar secara otomatis. Menggunakan tombol, RF dan Ethernet shield yang berkomuikasi melalui jaringan internet untuk dapat membuka dan menutup pintu pagar. Masing – masing dari rangkaian memiliki fungsi tersendiri dan saling berkomunikasi untuk dapat membuka dan menutup pintu pagar sesuai dengan tugas dari sistem tersebut. Adapun rangkaian yang dibuat terdiri dari dua bagian yaitu pada pagar dan pada mobil. Pada pagar terdiri dari tiga sistem yaitu:
Rangkaian sistem pembuka dan penutup pintu pagar menggunakan Tombol
Rangkaian sistem pembuka dan penutup pintu pagar menggunakan RF
Sedangkan pada mobil terdiri dari satu sistem yaitu:
Rangkaian Reciver RF pembuka dan penutup pintu pagar otomatis
Pada rancangan ini semua komponen pada pagar dirangkaian pada sebuah mikrokontroler arduino yang memiliki chip ATmega 328-p sebagai pengendali utamanya. Mikrokontroler akan mendapat masukan dari tombol, RF dan Ethernet untuk dapat membuka dan menutup pintu pagar dengan cara mengendalikan motor untuk dapat berputar dengan bantuan driver motor.
Sedangkan pada rangkain mobil menggunakan mikrokontroler Atmega 328-p sebagai pengendalinya. Mikrokontroler akan menerima sinyal RF dari pagar ketika jaraknya berada pada tiga meter dari pagar kemudian RF saling berkomunikasi untuk membuka dan menutup pintu pagar. Penjelasan untuk tiap rangkaian dapat dilihat pada sub bab berikutnya.
Pada rancangan ini dibuat sebuah prototipe pagar untuk mengimplementasikan rancangan, pada prototipe ini dibuat sebuah pintu pagar yang ditarik dari putaran motor DC servo dengan torsi yang kecil. Pada prototipe ini motor DC servo dikendalikan melalui tiga sistem yang dirancang. Berikut merupakan komponen pagar yang digunakan dan penjelasan dalam implementasi prototipe:
1. Implementasi pagar menggunakan acrylic dengan ketebalam ± 0,4cm dengan ukuran 25 × 30 cm yang merupakan dudukan atau pondasi dari pagar.
sehingga jalur yang digunakan untuk menutup dan membuka pintu pagar ± 14cm
3. Pintu pagar tersebut ditarik menggunakan benang nilon dengan panjang tali penarik untuk membuka pintu pagar 25cm dan panjang tali untuk menutup pintu pagar 20cm
4. Motor DC servo yang digunakan yaitu GWS dengan torsi 3,2 kg/cm untuk tegangan 6v, berat pintu pagar ±0,1kg implementasi menggunakan pintu pagar dari acrylic dengan ketebalan ±0,4cm. pada prototipe ini digunakan motor servo yang kecil dikarenakan berat pintu hanya 0,1kg.
5. Seluruh rangkaian dibuat pada prototipe board untuk dapat memudahkan dalam merangkai seluruh sistem.
Untuk komponen elektronik yang bersifat modul dapat dilihat penjelasan pada bab II, komponen untuk setiap sistem yang digunakan juga dijelaskan pada bab II. Penjelasan diatas merupakan komponen yang digunakan hanya sebagai implementasi dalam menguji perancangan rangkaian elektronik pintu pagar otomatis.
3.2.1 Rangkaian pada Sistem Tombol
pagar. Sedangkan pada mikrokontroler menggunakan arduino yang terdiri dari rangkaian arduino dan chip ATmega 328-p yang memiliki 28 piranti. Pada pintu pagar dibuat juga limit switch yang berfungsi untuk memberhentikan pintu pagar pada posisi terbuka atau tertutup dan juga sebagai indikator bahwa pagar telah terbuka seluruhnya atau tertutup seluruhnya. Gambar rangkaian untuk tombol dapat dilihat dibawah ini
Gambar 3.2 Rangkaian membuka dan menutup pintu pagar dengan tombol Berikut merupakan penjelasan dari tiap piranti pada rangkaian membuka pintu pagar dengan tombol:
Piranti 12 (PD6) pada mikrokontroler Atmega 328-p (piranti digital 6 pada arduino) dihubungkan ke piranti 7 pada driver motor L293D yang merupakan piranti masukan dari mikrokontroler
Piranti 5 (PD3) pada mikrokontroler Atmega 328-p (piranti digital 3 pada arduino) dihubungkan ke tombol pertama.
Piranti 4 (PD2) pada mikrokontroler Atmega 328-p (piranti digital 2 pada arduino) dihubungkan ke tombol kedua.
Piranti 15 (PB1) pada mikrokontroler Atmega 328-p (piranti digital 9 pada arduino) dihubungkan ke limit switch close.
Piranti 14 (PB0) pada mikrokontroler Atmega 328-p (piranti digital 8 pada arduino) dihubungkan ke limit switch open.
Untuk piranti power dan piranti minimum sistem mikrokontroler telah disediakan papan arduino.
3.2.2 Rangkaian pada Sistem RF
Untuk rangkaian modul RF kedua dirangkai pada arduino yang dihubungkan ke driver dan motor yang akan di tempatkan pada pagar. LCD digunakan pada rangkaian pertama untuk pemberitahu bahwa pintu pagar telah terbuka atau tertutup. Pada pintu pagar dibuat limit switch untuk membatasi pintu pagar terbuka dan tertutup dan juga sebagai indikator pintu pagar telah terbuka dan tertutup. Rangkaiannya dapat dilihat pada gambar dibawah ini.
Gambar 3.3 Rangkaian membuka dan menutup pintu pagar dengan RF pada rumah
pin header 1x5 dan infrared pin header 1x3. Berikut merupakan penjelasan dari tiap piranti:
Piranti 2 RXD (PD0) pada atmega 328-p (piranti digital 0 pada arduino) dihubungkan piranti 4 RXD/TTL pada RF
piranti 3 TXD (PD1) pada atmega 328-p (piranti digital 1 pada arduino dihubungkan piranti 3 TXD/TTL pada RF
Piranti 1 dan 2 pada RF merupakan GND
Piranti 5 pada RF dihubungkan ke VCC yang merupakan sumber tegangan untuk RF sebesar 5V sesuai datasheet.
Piranti 11 (PD5) pada atmega 328-p (piranti digital 5 pada arduino) dihubungkan ke piranti 3 pada infrared berfungsi sebagai sensor penditeksi keberadaaan mobil.
Piranti 15 (PB1) pada mikrokontroler Atmega 328-p (piranti digital 9 pada arduino) dihubungkan ke limit switch close.
Piranti 14 (PB0) pada mikrokontroler Atmega 328-p (piranti digital 8 pada arduino) dihubungkan ke limit switch open.
Piranti 1 pada infrared dihubungkan ke VCC
Gambar 3.4 Rangkaian RF pada mobil
Pada rancangan ini, mikrokontroler dihubung pada LCD dan RF sebagai reciver sinyal dari pagar, LCD dihubungkan dengan metode 4bit yang memerlukan 6 buah line dan RF dihubungkan dengan menggunakan RX dan TX, Berikut merupakan penjelasan mengenai rangkaian dari tiap piranti:
a. 2 piranti kendali untuk LCD :
Piranti 18 pada mikrokontroler dihubungkan pada piranti RS (Register Select) dari LCD
Piranti 17 pada mikrokontroler dihubungkan pada piranti E (enable) LCD
b. 4 piranti bus data :
Pada VEE (CONTR) Piranti 3 LCD dihubungkan dengan resistor variabel 5KΩ antara VCC dan ground berfungsi untuk mengatur tingkat kontras LCD. Karena LCD yang digunakan mempunyai back light, maka ditambahkan 2 piranti yaitu piranti 15 berfungsi untuk catu daya +5 Volt dan piranti 16 berfungsi sebagai ground.
c. 2 piranti untuk kendali RF :
Piranti 2 pada mikrokontroler dihubungkan pada piranti 4 RF kyl 1020 Piranti 3 pada mikrokontroler dihubungkan pada piranti 3 RF kyl 1020
Pada rangkaian ini digunakan juga IC 7805 sebagai penurun tegangan dari baterai 9V untuk dapat menghidupkan LCD, mikrokontroler dan RF. Konsumsi arus yang dibutuhkan adalah sebagai berikut:
Rangkaian minimum mirokontroler Atmega328-p sesuai dengan datasheet membutuhkan konsumsi arus sekitar 25mA
Rangkaian LCD sesuai dengan datasheet membutuhkan konsumsi arus sekitar 3mA
Rangkaian RF sesuai dengan datasheet membutuhkan konsumsi arus sekitar 25mA untuk reciving dan 55 untuk transmitting
mikrokontroler sebagai catu daya dan dapat memberikan arus sampai 1 amper sehingga kebutuhan komponen terpenuhi.
3.2.3 Rangkaian pada Sistem Ethernet Shield
Ethernet shield merupakan modul tambahan untuk arduino yang berfungsi untuk memberikan arduino koneksi terhadap jaringan baik untuk jaringan local atau pun online. Ethernet dirangkaikan dengan menempelkan modul tersebut diatas arduino sehingga piranti Ethernet shield dan papan arduino menempel.
Rangkaian ketiga ini antara Ethernet shield, arduino sebagai mikrokontroler, komputer sebagai jaringan local, driver dan motor untuk penggerak pagar. Pada rangkaian Ethernet ini menggunakan jalur SPI (serial pararel input) yaitu memiliki jalur 4 piranti yaitu SS (slave select), MISO (Master input slave output), MOSI(Master output slave input), SCK (Slave clock). Pada rangkaian ini ditambahkan juga limit switch untuk pintu pagar sebagai indikator pintu pagar telah terbuka atau tertutup seluruhnya. Rangkaian dapat dilihat pada gambar dibawah ini.
Berikut merupakan penjelasan dari tiap piranti rangkaian diatas:
Piranti 19 PB5 pada mikrokontroler atmega 328-p (piranti digital 13 pada arduino) dihubungkan pada piranti SCK (Slave clock) dari Ethernet shield. Piranti 18 PB4 pada mikrokontroler atmega 328-p (piranti digital 12 pada
arduino) dihubungkan pada piranti MISO (Master input slave output) dari Ethernet shield.
Piranti 17 PB3 pada mikrokontroler atmega 328-p (piranti digital 11 pada arduino) dihubungkan pada piranti MOSI (Master output slave input) dari Ethernet shield.
Piranti 16 PB2 pada mikrokontroler atmega 328-p (piranti digital 10 pada arduino) dihubungkan pada piranti SS (Salve select) dari Ethernet shield. Piranti 15 (PB1) pada mikrokontroler Atmega 328-p (piranti digital 9 pada
arduino) dihubungkan ke limit switch close.
Piranti 14 (PB0) pada mikrokontroler Atmega 328-p (piranti digital 8 pada arduino) dihubungkan ke limit switch open.
Pada gambar rangkaian diatas untuk Ethernet shield digambar menggunakan pin header, pin sebelah kanan untuk Ethernet menggunakan piranti header 1x6 2buah dan untuk pin sebelah kiri menggunakan pin header 1x8 2buah.
3.3Rangkaian Pengerak Motor Driver L293D
Gambar 3.6 Rangkaian Driver L293D
Pada rangkaiannya piranti yang digunakan yaitu piranti 1 sebagai PWM (Pulse width modulation) pengatur kecepatan motor yang pada rancangan ini dihubungkan langsung ke VCC atau piranti ini juga berfungsi untuk mengaktifkan motor, piranti 2 dan piranti 7 sebagai masukan dari mikrokontroler yang mangatur arah putaran motor, piranti 3 dan piranti 6 sebagai keluaran ke motor untuk menggerakkan motor, Piranti 4 dan piranti 5 merupakan GND, piranti 8 merupakan VCC +5V sesuai dengan datasheet motor yang akan digerakkan.
3.4Perancangan Perangkat Lunak
Perangkat lunak atau program merupakan suatu perintah yang digunakan untuk dapat mengatur segala kegiatan dan memerintahkan mikrokontroler pada rangkaian untuk dapat bekerja sesuai dengan rancangan. Perangkat lunak merupakan bahasa yang digunakan untuk sistem dalam mengerjakan pekerjaannya. Perangkat lunak ini terdapat pada mikrokontroler sebagai komponen pengontrol sistem.
C arduino namum pada dasarnya program tersebut akan dikompile oleh IDE menjadi assembly yang dapat dimengerti oleh mikrokontroler.
Perangkat lunak yang dirancang terdiri dari tiga bagian yaitu program untuk tombol yang terdiri dari tombol buka dan tutup, program untuk RF terdiri dari RF pada pagar dan RF pada mobil dan program untuk Ethernet. Berikut alur program (flowchart) untuk rangkaian pada pagar dan pada mobil.
3.4.1 Flowchart
Flowchart merupakan alur program yang akan dirancang. Pada rancangan perangkat keras terdapat dua rangkaian yang memerlukan program maka pada perangkat lunaknya terdapat dua flowchart yaitu:
Alur program pada rangkaian pagar
Ethernet pada browser terdiri dari tombol buka dan tutup. Jika tidak ada tombol Ethernet ditekan makan tembali mengecek koneksi.
Alur program pada rangkaian mobil
Pada alur program ini pertama sekali menginisialisasi variable, LCD, Bautrate. Kemudian mengirim sinyal “A” kemudian akan membaca data serial yang diterima dari RF dari pagar. jika data yang masuk “S” maka LCD menampilkan “sinyal tutup” kemudian mengirim sinyal “T”, jika tidak akan kembali mengirim sinyal “A”.
Alur program pada rangkaian mobil.
Start
Inisialisasi variable, LCD,
bautrate
Kirim signal “A”
Baca data serial
Data “s” ?
LCD = “sinyal tutup”
Kirim pesan “T”
BAB IV
PENGUJIAN SISTEM
4.1 Metode pegujian
Pada bab ini dilakukan pengujian alat pada prototipe pengendali pintu pagar berbasis arduino yang bertujuan untuk dapat mengetahui apakah seluruh rangkaian bekerja sesuai dengan yang diharapkan, dengan dilakukan pengujian ini maka prototipe dapat di katakan telah siap dan berhasil apabila seluruh rangkaian berjalan sesuai dengan rancangan.
Pengujian sistem dilakukan dua tahap yaitu pada rangkaian prototipe pagar dan pada rangkaian mobil. Rangkaian pada pagar terdiri dari tombol, RF dan Ethernet dengan arduino sebagai mikrokontrolernya. Sedangkan pada rangkaian mobil terdiri dari LCD 16x2 dan RF dengan atmega 328-p sebagai mikrokontrolernya. Berikut ini merupakan pengujian rangkaian pada prototipe pagar.
4.1.1 Pengujian rangkaian Tombol
Gambar 4.1 Rangkaian tombol sebelum ditekan
Gambar 4.2 Rangkaian tombol ditekan
Setelah dilakukan pengujian sesuai dengan gambar kedua maka rangkaian berhasil diuji dengan hidupnya led ketika tombol ditekan, hidupnya led untuk tombol merah dan tombol putih maka sistem pertama bekerja sesuai dengan rancangan yang diinginkan.
4.1.2 Pengujian rangkaian RF (Radio frekuensi)
Pada rangkaian RF terdapat dua rangkaian yaitu rangkaian pada pagar dan rangkaian pada mobil untuk menguji dilakukan pada masing – masing rangkaian. Berikut merupakan gambar rangkaian RF pada pagar dan rangkaian RF pada mobil.
Gambar 4.3 Rangkaian RF pada pagar
Pada rangkaian ini modul RF yang digunakan yaitu 433Mhz YS 1020, sesuai dengan datasheet RF ini mampu mencapai jarak jangkauan hingga 1km dengan syarat menggunakan antena pada tiap modul recive dan transmiternya, Namun pada rangkaian ini hanya menggunakan satu antenna karena yang dibutuhakan hanya maximal 5m untuk membuka pintu pagar sesuai dengan rancangan.
Pada rangkaian RF yang direncanakan dimobil terdapat LCD yang berfungsi sebagai pemberitahu keadaan pintu pagar sudah terbuka atau masih tertutup, LCD ini juga sebagai pemberitahu signal telah dikirim untuk membuka pagar. berikut ini gambar dari LCD.
Gambar 4.5 LCD menunggu signal dari pagar
Gambar 4.6 LCD telah menerima signal untuk menutup pagar
Setelah melakukan pengujian sesuai dengan gambar yaitu adanya tampilan pada LCD ketika rangkaian RF berkomunikasi untuk membuka pintu pagar maka rangkaian untuk sistem kedua yaitu membuka pintu pagar dengan RF berhasil dan sesuai dengan rancangan yang diinginkan.
Keseluruhan sistem RF diuji pada jarak ±5meter antara reciver dan transmitter. Reciver ditempatkan pada mobil dan transmitter pada pagar.
4.1.3 Pengujian rangkaian Ethernet
Gambar 4.7 Settingan IP addrees pada komputer
Settingan pada gambar diatas mengunakan OS XP sehingga settingannya sesuai dengan gambar diatas. Setelah IP diset maka dilakukan PING yaitu uji koneksi antara komputer dan Ethernet, pengujian ini dilakukan dengan menggunakan perintah CMD (command prompt) dengan cara mengetikkan PING kemudian alamat IP yang ingin dituju. Berikut gambar pengujian koneksi IP dengan PING.
Setelah melakukan PING dan hasilnya seperti gambar diatas berarti koneksi berhasil, kemudian melakukan uji program dan koneksi melalui browser. Pada pengujian ini browser yang digunakan Mozilla firefox karena browser ini yang paling umum digunakan. Pengujian dilakukan dengan cara mengetikan IP pada bar alamat browser. IP untuk Ethernet yaitu 10.0.0.103 sedangkan untuk komputer 10.0.0.101, Berikut gambar pengujian pada browser.
Gambar 4.9 Sistem Ethernet shield pembuka pintu pagar pada browser mozila. Setelah melakukan pengujian terhadap sistem ketiga yaitu membuka dan menutup pintu pagar dengan Ethernet dan tampilan sesuai dengan gambar diatas, ketika tombol pada tampilan browser ditekan dan pintu pagar terbuka dan tertutup maka rangkaian berhasil dan sesuai dengan rancangan.
4.2 Pengujian keseluruhan
Pada pengujian ini seluruh sistem digabungkan dan diuji bersamaan, sistem tersebut adalah:
Setelah seluruh rangkaian digabungkan, kabel UTP Ethernet dihubungkan ke komputer melalui hub dan antenna pada RF dipasang, kemudian Power pada arduino menggunakan adaptor 12V, ini sesuai dengan datasheet arduino ketika ingin menggukana output power 5V maka catu daya yang di berikan antara 8 – 12V agar arduino memberikan output 5V yang stabil. Kemudian program pada tiap mikrokontroler telah di upload ke dalam mikrokontroler tersebut, maka pengujian keseluruhan dapat dilakukan.
Pengujian dilakukan dengan cara membuka pintu pagar dengan tombol dan menutup pintu pagar dengan RF, kemudian membuka pintu pagar dengan Ethernet dan menutup dengan tombol, seterusnya dilakukan dengan kombinasi antara ketiga sistem tersebut. Setelah seluruh kombinasi antara sistem pengujian berhasil maka rangkaian prototipe telah berhasil dan sesuai rancangan.
Pengujian ini dipengaruhi oleh tegangan yang diberikan kepada rangkaian semakin besar akan mempersingkat waktu membuka dan menutup pintu pagar namun juga akan membuat rangkaian tidak stabil ketika tegangan terlalu besar. Tegangan harus sesuai dengan rangkaian dan komponen modul yang dianjurkan berdasarkan datasheet.
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan dari proses ujicoba rancangan dan implementasi pengendali pintu pagar berbasis arduino dapat diperoleh kesimpulan, antara lain:
1. Rancangan ketiga sistem yang dibuat berhasil dalam membuka dan menutup prototipe pintu pagar sesuai dengan fungsi dari ketiga sistem yang dirancang.
2. Waktu yang dibutuhkan untuk membuka pintu pagar dan menutup pintu pagar dapat dipersingkat dengan menambahkan tegangan namun modul arduino dan Ethernet akan lebih cepat panas dan tidak stabil.
3. Pada rangkaian elektronik pagar otomatis yang terdiri dari tiga sistem di pengaruhi oleh beberapa hal yaitu :
Pada RF dipengaruhi oleh jenis antenna dan panjang antenna yang digunakan untuk berkomunikasi antara pagar dan mobil agar dapat membuka pagar.
Pada Ethernet dipengaruhi oleh jaringan yang digunakan untuk mengakses IP agar dapat membuka pagar.
5.2 Saran
Untuk meningkatkan perancangan dan sistem dapat ditambahkan atau dilakukan hal berikut:
1. Untuk mengaplikasikan rancangan dan sistem pada komponen yang sebenarnya perlu penganalisaan pada rangkaian mekanik pagar yang sebenarnya untuk dapat menentukan motor dan relay yang akan digunakan.
DAFTAR PUSTAKA
1. Atmel. (2011). 8-bit Atmel Microcontroller with 4/8/16/32 KBytes In-System Programmable Flash.
2. Arduino Uno. Diakses Agustus 14, 2013, dari
http://arduino.cc/en/Main/ArduinoBoardUno.
3. Arduino Development Environment. Diakses September 6, 2013, dari http://arduino.cc/en/Guide/Environment.
4. Arduino Ethernet Library. Diakses Agustus 16, 2012, dari http://arduino.cc/en/Reference/Ethernet.
5. Millman, Jacob dan Christos C. Halkias, Elektronika Terpadu : Rangkaian dan Sistem Analog dan Digital, diterjemahkan oleh M. Barmawi dan M.O.
Tjia, Jakarta : Penerbit Erlangga, Cetakan Keempat, 1993.
6. Bishop, Owen, Dasar – Dasar Elektronika, Jakarta : Penerbit Erlangga, Cetakan I, 2004.
7. Tarigan, Pernantin, Rangkaian Logika Digital, Medan : Universitas Sumatera Utara Press, Cetakan ke – II, 2006.
8. Tarigan, Pernantin, Sistem Tertanam (Embedded System), Yogyakarta : Penerbit Graha Ilmu, Cetakan Pertama, 2011.
9.
LAMPIRAN A
GAMBAR RANGKAIAN KESELURUHAN
LANJUTAN LAMPIRAN A
GAMBAR RANGKAIAN KESELURUHAN
LAMPIRAN B
PROGRAM KESELURUHAN SISTEM
Program pada pagar
#include <SPI.h> String tampilan = "";
char incomingByte; // incoming data int LED1 = 13; // LED pin const int tombol_buka = 2; const int tombol_tutup = 3; const int motorbuka = 6; const int motortutup = 7; const int sensor = 5; const int limitbuka = 9; const int limittutup = 8;
String pesan = "N";
int sinyal_tombol_buka = 1; int sinyal_tombol_tutup = 1; int sinyal_sensor = 1; int sinyal_limitbuka = 1; int sinyal_limittutup = 1;
int status_pintu=0; int indikator = 0;
void setup() { Serial.begin(9600);
pinMode(LED1, OUTPUT); pinMode(tombol_buka, INPUT); pinMode(tombol_tutup, INPUT); pinMode(sensor, INPUT); pinMode(motorbuka, OUTPUT); pinMode(motorbuka, OUTPUT); digitalWrite(LED1, LOW);
Ethernet.begin(mac, ip); server.begin();
}
void loop() {
Client client = server.available(); boolean current_line_is_first = true; baca_serial();
if (client) {
boolean current_line_is_blank = true; while (client.connected()) {
client.println("Content-Type: text/html"); client.println();
//client.println("<META HTTP-EQUIV=REFRESH CONTENT=5 URL=>");
client.println("<center><p><h1>Arduino + Gate Controller</h1></p><center><hr><br />"); if(status_pintu==0){client.println("<p><h1>Gate Tertutup</h1></p></center>");}
if(status_pintu==1){client.println("<p><h1>Gate Terbuka</h1></p></center>");}
client.println("<form method=get name=form>");
client.println("<button name=b value=1 type=submit style=height:80px;width:150px>Gate Open</button>");
client.println("<button name=b value=2 type=submit style=height:80px;width:150px>Gate Close</button>");
client.println("</form><br />");
client.println("<hr><center></a><br />");
client.println("<p>Klik Gate Open Untuk Membuka Gerbang</p></center>"); client.println("<p>Klik Gate Close Untuk Menutup Gerbang</p></center>"); baca_serial(); // Serial.println(incomingByte); if(incomingByte == 'A') {buka_pintu();}
if(incomingByte == 'T') {pesan = "N"; digitalWrite(LED1, HIGH); tutup_pintu(); }}
if(pesan == 'S') {Serial.println(pesan); delay(50); }
if(status_pintu==0 && pesan != 'S'){Serial.println("C"); delay(50); } if(status_pintu==1 && pesan != 'S'){Serial.println("B"); delay(50); }
sinyal_limitbuka = digitalRead(limitbuka); sinyal_limittutup = digitalRead(limittutup); sinyal_sensor = digitalRead(sensor);
if (sinyal_tombol_buka==LOW) {buka_pintu();} if (sinyal_tombol_tutup==LOW) { tutup_pintu();} if (sinyal_sensor==LOW) {pesan="S";}
if (sinyal_limitbuka==LOW && status_pintu==0) {stop_buka_pintu();} if (sinyal_limittutup==LOW && status_pintu==1) {stop_tutup_pintu();} }
void buka_pintu() {
if(status_pintu==0){
digitalWrite(motorbuka, HIGH); digitalWrite(motortutup, LOW); digitalWrite(LED1, HIGH); }}
void stop_buka_pintu() {
digitalWrite(motorbuka, LOW); digitalWrite(motortutup, LOW); digitalWrite(LED1, LOW); status_pintu=1; }
void tutup_pintu() {
if(status_pintu==1){
digitalWrite(motorbuka, LOW); digitalWrite(motortutup, HIGH); digitalWrite(LED1, HIGH); pesan = "N";
}}
void stop_tutup_pintu() {
digitalWrite(motorbuka, LOW); digitalWrite(motortutup, LOW); digitalWrite(LED1, LOW); status_pintu=0;
pesan = "N"; }
Program pada mobil
#include <LiquidCrystal.h>
LiquidCrystal lcd(12, 11, 7, 6, 5, 4);
char incomingByte;
String pesan = "A";
void setup() {
lcd.begin(16, 2);
lcd.print("Menunggu Sinyal");
void loop() {
if (Serial.available() > 0) {
incomingByte = Serial.read();
delay(100);
if(incomingByte == 'B') {lcd.begin(16, 2); lcd.print("Pintu Terbuka");}
if(incomingByte == 'C') {lcd.begin(16, 2); lcd.print("Pintu Tertutup");}
if(incomingByte == 'S') {lcd.begin(16, 2); lcd.print("Sinyal Tutup"); pesan="T";}
delay(500); }
Serial.println(pesan);
delay(500);
Serial.println(pesan);
delay(500);
LAMPIRAN C
DATASHEET KOMPONEN
1. DATASHEET MIKROKONTROLER ATMEGA 328P-PU
2. DATASHEET ARDUINO UNO R3
3. DATASHEET LCD (LIQUID CRYSTAL DISPLAY) HD44780U
4. DATASHEET ADJUSTABLE INFRARED
5. DATASHEET DRIVER MOTOR L293D
6. DATASHEET 433MHZ YS-1020
7. DATASHEET DFRDUINO ETHERNET SHIELD