ANALISIS UNJUK KERJA EKUALIZER PADA SISTEM KOMUNIKASI
DENGAN ALGORITMA
LEAST MEAN FOURTH BASED POWER OF TWO
QUANTIZER
(LMF-PTQ)
Diajukan untuk memenuhi salah satu persyaratan dalam menyelesaikan pendidikan sarjana (S-1) pada Departemen Teknik Elektro Sub Jurusan Teknik Telekomunikasi
Oleh :
100422011 GINDA UTAMA PUTRI
DEPARTEMEN TEKNIK ELEKTRO
PROGRAM PENDIDIKAN SARJANA EKSTENSI
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
LEMBAR PENGESAHAN TUGAS AKHIR
ANALISIS UNJUK KERJA EKUALIZER PADA SISTEM
KOMUNIKASI DENGAN ALGORITMA
LEAST MEAN
FOURTH BASED POWER OF TWO QUANTIZER
(LMF-PTQ)
Oleh :
100422011
GINDA UTAMA PUTRI
Tugas Akhir ini diajukan untuk melengkapi salah satu syarat untuk
memperoleh gelar Sarjana Teknik pada
DEPARTEMEN TEKNIK ELEKTRO PPSE FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
Sidang pada Tanggal 8 Bulan Mei Tahun 2013 di depan penguji :
1. Ketua Penguji : Ir. M. Zulfin, MT ………..
2. Anggota Penguji : Ali Hanafiah Rambe, ST.MT ………..
Disetujui Oleh : Pembimbing Tugas Akhir
NIP . 196904241997021001 Rahmad Fauzi,ST. MT
Diketahui Oleh :
Ketua Departemen Teknik Elektro Fakultas Teknik USU
ABSTRAK
Karakteristik kanal komunikasi yang tidak ideal menimbulkan terjadinya
distorsi pada sinyal informasi yang melewatinya. Distorsi tersebut dapat
mengakibatkan kenaikan Symbol Error Rate (SER) data informasi hasil deteksi di
sisi penerima. Teknik ekualisasi adalah proses pengolahan sinyal yang digunakan
untuk mengatasi Intersymbol Interference (ISI). Intersymbol Interference (ISI)
adalah sebuah fenomena masalah yang selalu ada dalam komunikasi dengan
transmisi data yang berbasiskan simbol. ISI ini muncul akibat dari keterbatasan
bandwidth yang dilakukan oleh filter pembatas. Sehingga mengakibatkan
pelebaran pulsa yang memungkinkan terjadinya interferensi antar simbol (ISI)
yang berdekatan. Distorsi-distorsi yang yang terjadi dapat mengakibatkan nilai
error pada sisi penerima semakin besar. Sehingga perlu diminimalisasi dengan
menggunakan ekualizer.
Dalam Tugas Akhir ini akan dianalisis kinerja ekualizer adaptif dengan
algoritma Least Mean Fourth based Power OF Two Quantizer (LMF-PTQ) dalam
mengatasi noise dan ISI. Agar ekualizer adaptif dapat bekerja dengan baik, maka
parameter-parameter ekualizer perlu diatur terlebih dahulu. Dari hasil simulasi
yang dilakukan diperoleh besarnya SER untuk sinyal yang dipengaruhi oleh
Fading Rayleigh dan AWGN menggunakan ekualizer pada saat SNR = 15 sampai
27 adalah 0.8067 sampai 0.7094. Untuk panjang filter (N) mulai 20 sampai 41
maka nilai SER yang dihasilkan adalah 0.6856 sampai 0.7171. Untuk step size
mulai dari 0.001 sampai 0.032 maka nilai SER yang dihasilkan adalah 0.8242
sampai 0.6849. Hasil simulasi tanpa menggunakan ekualizer dengan
menggunakan parameter SNR dan panjang filter yang diubah-ubah diperoleh nilai
KATA PENGANTAR
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Esa, atas
berkat rahmat dan karunia-Nya sehingga penulis dapat menyelesaikan Tugas
Akhir ini.
Tugas Akhir dengan judul “ANALISIS UNJUK KERJA EKUALIZER PADA
SISTEM KOMUNIKASI DENGAN ALGORITMA LEAST MEAN FOURTH
BASED POWER OF TWO QUANTIZER (LMF-PTQ)” dibuat untuk memenuhi syarat kesarjanaan di Jurusan Teknik Elektro, Fakultas Teknik Universitas Sumatera Utara.
Pada kesempatan ini penulis menyampaikan terima kasih yang
sebesar-besarnya kepada :
1. Untuk ayahanda dan ibunda tercinta Muhammad Yusuf MT dan Farida
Aryani, Spd. yang telah memberi banyak dukungan, semangat, dan doa
kepada penulis sehingga penulis dapat menyelesaikan Tugas Akhir ini.
2. Buat adik yang penulis sayangi yaitu Yovie Dwi Villasica.
3. Bapak Ir. Surya Tarmizi Kasim, M.Si selaku Ketua Departemen Teknik
Elektro Fakultas Teknik Universitas Sumatera Utara.
4. Bapak Rahmad Fauzi, ST. MT selaku Sekretaris Departemen Teknik Elektro
Universitas Sumatera Utara dan Dosen Pembimbing saya.
5. Dosen Pembanding yang membantu dalam penyempurnaan Tugas Akhir ini.
6. Seluruh staf pengajar di Departemen Teknik Elektro Fakultas Teknik
Universitas Sumatera Utara yang telah memberi bekal ilmu kepada penulis
selama menjalani masa perkuliahan.
7. Seluruh karyawan di Departemen Teknik Elektro Fakultas Teknik Universitas
Sumatera Utara, khususnya buat Bang Martin dan Bang Divo terima kasih atas
semua bantuannya.
8. Seluruh teman-teman khususnya buat abang Ahmad Surury yang telah banyak
memberikan do’a dan dukungan kepada penulis.
9. Seluruh saudara, Wopat, Ayah, Ibu, alm.Bulek, alm.Bude, Pakwo nanok,
Bg Heri, Kak Epi, Kak Nopit, bg Dayat, Eva, Kak Vira, Bg Yan, Kak Devi,
Mas Broto, Adek Yunda, Putro, dan semua ponakan yang telah banyak
memberi dukungan dan doa kepada penulis.
10.Teman seperjuangan selama Tugas Akhir yaitu Butet Nata Simamora dan
Direstika Yolanda.
11. Teman-teman Ekstensi Teknik Elektro Telekomunikasi stambuk 2010 : bang
Roland, Kak Astrid, Kak Dila, Masta, Kak Ami, Kak Elzas, Bang Doni,
Ronzi, Bang Wira, Ijonk, kak Nova, Kak Gita, kak Winny serta buat
teman-teman yang tak disebut namanya terima kasih atas kebaikan yang kalian
berikan kepada penulis.
Penulis begitu menyadari bahwa di dalam penyusunan laporan Kerja
Praktek ini masih banyak terdapat kekurangan, oleh sebab itu penulis sangat
mengharapkan kritik dan saran yang dapat menyempurnakan laporan ini.
Medan, Maret 2013
Penulis
Ginda Utama Putri
DAFTAR ISI
LEMBAR PENGESAHAN
ABSTRAK ... i
KATA PENGANTAR ... ii
DAFTAR ISI ... iv
DAFTAR GAMBAR ... vii
DAFTAR TABEL ... ix
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Rumusan Masalah ... 2
1.3 Tujuan Penulisan ... 2
1.4 Batasan Masalah ... 2
1.5 Metodologi Penulisan ... 3
1.6 Sistematika Penulisan ... 3
BAB II DASAR TEORI ... 5
2.1 Inter Symbol Interference (ISI) ... 5
2.2 Pembangkitan Bilangan Acak ... 7
2.3 Konsep Modulasi ... 7
2.4 Filter FIR ... 10
2.6 AWGN (Additive White Gaussian Noise) ... 16
2.7 Algoritma LMF-PTQ ... 18
2.8 Signal Noise to Ratio (SNR) ... 21
2.9 Symbol Error Rate (SER) ... 22
BAB III PERMODELAN SISTEM EKUALIZER ... 23
3.1 Umum ... 23
3.2 Asumsi-asumsi Yang Digunakan ... 23
3.3 Parameter Kerja Sistem ... 24
3.4 Algoritma LMF-PTQ ... 24
3.5 Tahapan Pemrograman... 26
BAB IV ANALISIS UNJUK KERJA EKUALIZER PADA SISTEM KOMUNIKASI ... 30
4.1 Umum ... 30
4.2 Analisis Kinerja Ekualizer Dengan Algoritma LMF-PTQ ... 30
4.3 Pengaruh SNR Terhadap Nilai SER Tanpa Ekualizer ... 31
4.4 Pengaruh Panjang Filter Terhadap Nilai SER Tanpa Ekualizer ... 32
4.5 Pengaruh SNR Terhadap Nilai SER Menggunakan LMF-PTQ Ekualizer ... 33
4.7 Pengaruh Panjang Filter Terhadap Nilai SER Menggunakan LMF-PTQ Ekualizer ... 35
BAB V PENUTUP ... 39
5.1 Kesimpulan ... 39
5.2 Saran ... 39
DAFTAR GAMBAR
Gambar 2.1 (a) Data Yang Dikirim... 6
(b) Data Yang Diterima ... 6
Gambar 2.2 Inter Symbol Interference ... 6
Gambar 2.3 Bentuk Sinyal 8-QAM Untuk Jumlah Bit=3 ... 8
Gambar 2.4 Diagram Konstelasi Modulasi 4-QAM dan 8-QAM ... 9
Gambar 2.5 Diagram Konstelasi Modulasi 16-QAM ... 9
Gambar 2.6 Blok Diagram Dari Bentuk Langsung Filter Digital FIR ... 12
Gambar 2.7 Struktur Tranversal Filter FIR ... 13
Gambar 2.8 Lingkungan Kanal Mutipath ... 13
Gambar 2.9 (a) Grafik Kepadatan Spektrum Daya White Noise ... 16
(b) Fungsi Kepadatan Probabilitas AWGN... 16
Gambar 2.10 Adaptive System Ekualizer ... 19
Gambar 2.11 Input-Output Karakteristik Dari 4 Bit Power Of Two Quantizer 2.1 Gambar 3.1 Permodelan Ekualizer Dan Sistem Komunikasi ... 23
Gambar 3.2 Flowchart Algoritma LMF-PTQ Ekualizer ... 25
Gambar 4.1 Scatter Plot Hasil Simulasi Tanpa Ekualizer Pada saat SNR=25dB ... 40
Gambar 4.2 Scatter Plot Hasil Simulasi Tanpa Ekualizer Pada saat Panjang filter=37 ... 33
DAFTAR TABEL
Tabel 4.1 Pengaruh SNR Terhadap Nilai SER Tanpa Ekualizer ... 31
Tabel 4.2 Pengaruh Panjang Filter Terhadap Nilai SER Tanpa Ekualizer ... 32
Tabel 4.3 Pengaruh SNR Terhadap Nilai SER Menggunakan LMF-PTQ
Ekualizer ... 33
Tabel 4.4 Pengaruh Panjang Filter Terhadap Nilai SER Menggunakan LMF-PTQ
Ekualizer ... 35
Tabel 4.5 Pengaruh Step Size Terhadap Nilai SER Menggunakan LMF-PTQ
ABSTRAK
Karakteristik kanal komunikasi yang tidak ideal menimbulkan terjadinya
distorsi pada sinyal informasi yang melewatinya. Distorsi tersebut dapat
mengakibatkan kenaikan Symbol Error Rate (SER) data informasi hasil deteksi di
sisi penerima. Teknik ekualisasi adalah proses pengolahan sinyal yang digunakan
untuk mengatasi Intersymbol Interference (ISI). Intersymbol Interference (ISI)
adalah sebuah fenomena masalah yang selalu ada dalam komunikasi dengan
transmisi data yang berbasiskan simbol. ISI ini muncul akibat dari keterbatasan
bandwidth yang dilakukan oleh filter pembatas. Sehingga mengakibatkan
pelebaran pulsa yang memungkinkan terjadinya interferensi antar simbol (ISI)
yang berdekatan. Distorsi-distorsi yang yang terjadi dapat mengakibatkan nilai
error pada sisi penerima semakin besar. Sehingga perlu diminimalisasi dengan
menggunakan ekualizer.
Dalam Tugas Akhir ini akan dianalisis kinerja ekualizer adaptif dengan
algoritma Least Mean Fourth based Power OF Two Quantizer (LMF-PTQ) dalam
mengatasi noise dan ISI. Agar ekualizer adaptif dapat bekerja dengan baik, maka
parameter-parameter ekualizer perlu diatur terlebih dahulu. Dari hasil simulasi
yang dilakukan diperoleh besarnya SER untuk sinyal yang dipengaruhi oleh
Fading Rayleigh dan AWGN menggunakan ekualizer pada saat SNR = 15 sampai
27 adalah 0.8067 sampai 0.7094. Untuk panjang filter (N) mulai 20 sampai 41
maka nilai SER yang dihasilkan adalah 0.6856 sampai 0.7171. Untuk step size
mulai dari 0.001 sampai 0.032 maka nilai SER yang dihasilkan adalah 0.8242
sampai 0.6849. Hasil simulasi tanpa menggunakan ekualizer dengan
menggunakan parameter SNR dan panjang filter yang diubah-ubah diperoleh nilai
BAB I
PENDAHULUAN
1.1 Latar Belakang
Dalam telekomunikasi, gangguan Intersymbol Interference (ISI) merupakan
bentuk distorsi sinyal di mana satu simbol mengganggu simbol berikutnya. Ini
adalah keadaan yang tidak diinginkan dan menyebabkan gangguan, sehingga
membuat komunikasi tidak baik. Kehadiran ISI dalam sistem dapat menimbulkan
kesalahan dalam perangkat pada keluaran di penerima.
Karakteristik kanal komunikasi yang tidak ideal menimbulkan terjadinya
distorsi pada sinyal informasi yang melewatinya. Distorsi tersebut dapat
mengakibatkan kenaikan Symbol Error Rate (SER) data informasi hasil deteksi di
sisi penerima.
Karena kanal fading random dan berubah terhadap waktu, ekualizer harus
mendeteksi karakteristik perubahan waktu pada kanal yang disebut adaptif
ekualizer. Pada Tugas Akhir ini menggunakan algoritma Least Mean Fourth based
Power of Two Quantizer (LMF-PTQ) yang merupakan salah satu algoritma untuk
aplikasi adaptif ekualizer. Ekualisasi adalah teknik yang digunakan untuk menanggulangi ISI akibat lintasan multipath dari kanal, yang menyebabkan
1.2 Rumusan Masalah
Yang menjadi rumusan masalah dalam Tugas Akhir ini adalah :
1. Bagaimana prinsip kerja algoritma Least Mean Fourth based Power of Two
Quantizer (LMF-PTQ) dalam menangani masalah interferensi sinyal.
2. Bagaimana tingkat perbaikan dan kualitas sinyal termodulasi yang diolah
dengan menggunakan software MatlabR2010a untuk algoritma Least Mean
Fourth based Power of Two Quantizer (LMF-PTQ).
1.3 Tujuan Penulisan
Adapun yang menjadi tujuan dari penulisan Tugas Akhir ini adalah untuk
mengetahui prinsip kerja ekualisasi dengan algoritma Least Mean Fourth based
Power of Two Quantizer (LMF-PTQ) dan mengukur performansi sinyal
termodulasi setelah diproses berdasarkan parameter SER pada sistem komunikasi.
1.4 Batasan Masalah
Untuk memudahkan pembahasan pada Tugas Akhir ini, maka dibuat
pembatasan masalah sebagai berikut :
1. Hanya membahas unjuk kerja ekualizer pada sistem komunikasi menggunakan
algoritma Least Mean Fourth based Power of Two Quantizer (LMF-PTQ.
2. Modulasi yang dipakai didalam analisa adalah 4 QAM.
3. Penganalisis unjuk kerja dilakukan untuk mengetahui probabilitas symbol
error rate, step size, panjang ekualizer, serta SNR.
4. Perhitungan kinerja (SER) dilakukan dengan bantuan bahasa pemograman
1.5 Metodologi Penulisan
Metode penulisan yang digunakan pada Tugas Akhir ini adalah :
1. Studi Literatur, yaitu dengan membaca teori-teori yang berkaitan dengan
topik Tugas Akhir yang terdiri dari buku-buku referensi baik yang dimiliki
oleh penulis atau dari perpustakaan dan juga dari artikel-artikel, jurnal,
internet, dan lain-lain.
2. Diskusi, konsultasi dengan dosen pembimbing dan narasumber lain yang
berkompeten untuk mendapatkan pemahaman materi dan teori-teori terkait.
3. Tahap Perancangan Pemodelan dan Simulasi, berdasarkan studi literatur
dibuat perancangan sistem sesuai kondisi yang diinginkan dengan
menggunakan software Matlab.
4. Tahap Analisis dan Penarikan Kesimpulan.
1.6 Sistematika Penulisan
Untuk memberikan gambaran mengenai Tugas Akhir ini secara singkat,
maka penulis menyusun sistematika penulisan sebagai berikut :
BAB 1 : PENDAHULUAN
Bab ini menguraikan tentang latar belakang masalah, tujuan
penulisan, batasan masalah, metodologi penulisan, serta sistematik
penulisan.
BAB II : DASAR TEORI
Bab ini berisi tentang gambaran Teori yang dijelaskan pada bab ini
berkisar dari teori algoritma Least Mean Fourth based Power of
Two Quantizer (LMF-PTQ), modulasi QAM, Additif White
BAB III : PERANCANGAN MODEL
Dalam bab ini akan dibahas tentang perancangan model algoritma
Least Mean Fourth based Power of Two Quantizer (LMF-PTQ).
BAB IV : ANALISIS UNJUK KERJA EKUALIZER PADA SISTEM
KOMUNIKASI
Pada bab ini akan dijelaskan tentang spesifikasi kebutuhan minimum
sistem yang digunakan dan menyampaikan hasil analisis dari hasil
yang telah diperoleh .
BAB V : PENUTUP
Bab ini berisi tentang kesimpulan dan saran dari analisa yang telah
BAB II
DASAR TEORI
2.1 Intersymbol Interference (ISI)
Dalam telekomunikasi, gangguan Intersymbol Interference (ISI) merupakan
bentuk distorsi sinyal di mana satu simbol mengganggu simbol berikutnya. Hal ini
dapat terjadi karena pantulan sinyal (refleksi) yang menyebabkan penerimaan
sinyal informasi berulang dengan waktu yang berbeda (delay). Kehadiran ISI
dalam sistem adalah menimbulkan kesalahan dalam perangkat pada keluaran
penerima. Salah satu penyebab gangguan Intersymbol Interference (ISI) adalah
propagasi multipath dimana sinyal nirkabel dari pemancar mencapai penerima
melalui banyak jalur yang berbeda. Ini berarti bahwa sebagian atau seluruh simbol
tertentu akan menyebar ke simbol berikutnya, sehingga mengganggu deteksi yang
benar dari simbol-simbol.
Untuk menghilangkan ISI dapat dilakukan dengan memberikan filter
ekualizer disisi penerima. Selain gangguan yang berupa ISI, gangguan lain yang
biasanya terjadi adalah noise.
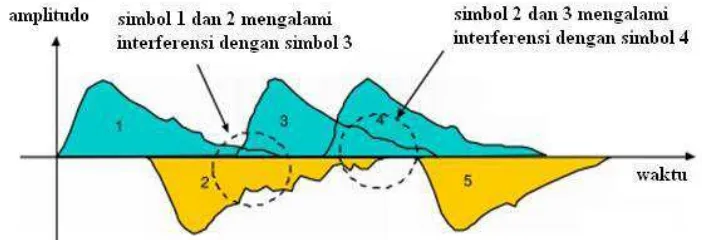
Pada Gambar 2.1 ditunjukkan terjadinya ISI dimana pada Gambar 2.1(a)
menunjukkan ilustrasi data yang dikirimkan dan pada Gambar 2.1(b)
menunjukkan data yang diterima. Terlihat bahwa data yang diterima mengalami
pelebaran energi akibat adanya delay dari saluran transmisi. Keberadaan ISI ini
sangat tidak diperlukan seperti layaknya noise yang dapat mengakibatkan
Gambar 2.1 (a) Data yang dikirim
(b) Data yang diterima
Untuk menghilangkan gangguan tersebut, salah satu caranya adalah dengan
membuat serangkaian filter yang nilai koefisien-koefisiennya harus direncanakan
terlebih dahulu. Dibawah ini ditunjukkan bagaimana pelebaran sinyal seperti
diatas dapat mengakibatkan dampak yang buruk pada sinyal. Gambar 2.2.
menunjukkan sinyal yang dikirimkan mengalami banyak peristiwa pada kanal
yang mengakibatkan sinyal tersebut tercampur dengan noise dan mengalami ISI
sehingga pada saat diterima simbol-simbol melebar dan mengganggu simbol yang
lain[1].
2.2 Pembangkitan Bilangan Acak
Pembangkitan bilangan acak digunakan untuk menghasilkan deretan
angka sebagai hasil perhitungan, yang diketahui distribusinya sehingga
angka-angka tersebut muncul secara acak.
Pembangkitan data masukan pada simulasi ini berdasarkan pada
pembnagkitan bilangan acak berdistribusi Uniform. Distribusi ini memiliki
kepadatan probalilitas yang sama untuk semua besaran yang diambil yang terletak
antara 0 dan 1. Fungsi kepadatan probabilitas dinyatakan dengan persamaan[2]:
�(�) =�
1
�−� untuk � ≤ � ≤ �
0 ������������ (2.1)
Dimana : a dan b = konstanta
Proses pembangkitan distribusi Uniform dilakukan dengan persamaan:
�= �+ (� − �)�� (2.2)
2.3 Konsep Modulasi Quadrature Ampiltude Modulation (QAM)
Modulasi adalah suatu proses untuk merubah gelombang pembawa (carrier)
sebagai fungsi dari sinyal informasi[3]. Sedangkan demodulasi adalah proses
suatu sinyal modulasi yang dibentuk kembali seperti sinyal aslinya dari suatu
gelombang pembawa (carrier) yang termodulasi oleh rangkaian. Kegunaan dari
modulasi adalah untuk memudahkan radiasi, multiplexing, mengatasi keterbatasan
peralatan, pembagian frekuensi dan mengurangi noise dan interferensi. Sistem
modulasi dibagi menjadi 2 yaitu antara lain :
1. Modulasi Analog
Yaitu teknik modulasi dimana gelombang pembawa (carrier) merupakan
gelombang analog (kontinyu). Meliputi antara lain :
a. Modulasi Amplitudo (AM)
b. Modulasi Frekuensi (FM)
2. Modulasi Digital
Yaitu teknik modulasi dimana gelombang pembawanya (carrier) adalah
merupakan gelombang pulsa, meliputi antara lain :
a. Amplitude-Shift Keying (ASK)
b. Frekuensi-Shift Keying (FSK)
c. Phase-Shift Keying (PSK)
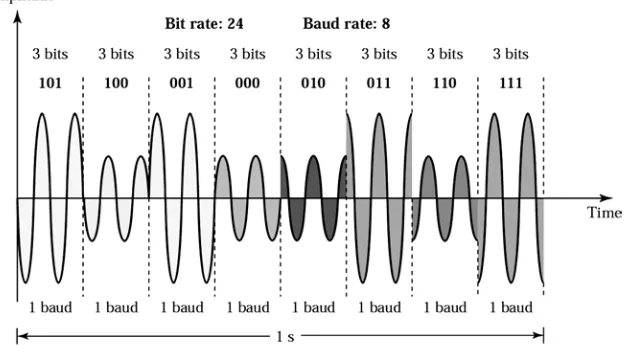
Pada Tugas Akhir ini menggunakan modulasi Quadrature Amplitude
Modulation (QAM). Quadrature Amplitude Modulation (QAM) merupakan salah
satu teknik modulasi digital. Pada QAM, informasi yang akan dikirimkan diubah
menjadi simbol QAM yang dapat direpresentasikan sebagai sinyal analog
pemodulasi. Sinyal pemodulasi ini mengubah amplitudo dan fasa dari sinyal
pembawa. Setiap perubahan fasa dan amplitudo sinyal pembawa
merepresentasikan satu simbol QAM yang terdiri sejumlah bit informasi. Orde
QAM yang sering dinyatakan sebagai M-ary QAM menunjukkan jumlah simbol
QAM yang dapat dihasilkan (M = 2 n ), dengan n adalah jumlah bit penyusun satu simbol. Bentuk sinyal modulasi QAM dapat ditunjukkan pada Gambar 2.3.
Sedangkan diagram konstelasinya ditunjukkan pada Gambar 2.4 dan 2.5[3].
Gambar 2.4 Diagram konstelasi modulasi 4-QAM dan 8-QAM
Gambar 2.5 Diagram kontelasi modulasi 16-QAM
Orde QAM yang sering digunakan dalam sistem komunikasi adalah orde 16,
64, dan 256. Dengan demikian pada orde 16-QAM dapat terbentuk 16 simbol.
Orde 64-QAM dapat menghasilkan 64 simbol, dan orde 256-QAM dapat
menghasilkan simbol sebanyak 256 simbol.
Pengubah bit ke simbol berfungsi memetakan bit informasi menjadi simbol
QAM. Bit informasi dibagi menurut banyak bit dalam satu simbol dan diubah ke
bentuk berurutan kemudian diurutkan menjadi bit ganjil dan bit genap. Pada
umumnya, keluaran pengubah bit-ke-simbol akan dipetakan ke bentuk kode Gray
(Gray Code) terlebih dulu sebelum dipetakan ke analog. Dengan dipetakan ke
kode Gray, antar simbol terdekat pada diagram konstelasi hanya akan berbeda
satu bit. Hal ini akan membantu mengurangi error di penerima dan untuk
mempermudah dalam desain perangkat keras. Jika misalnya di penerima terjadi
2.4 Filter Digital Finite Impuls Respons (FIR)
Filter adalah sebuah sistem atau jaringan yang secara selektif merubah
karakteristik (bentuk gelombang, frekuensi, fase dan amplitudo) dari sebuah
sinyal. Secara umum tujuan dari pemfilteran adalah untuk meningkatkan kualitas
dari sebuah sinyal sebagai contoh untuk menghilangkan atau mengurangi noise,
mendapatkan informasi yang dibawa oleh sinyal atau untuk memisahkan dua atau
lebih sinyal yang sebelumnya dikombinasikan, sinyal tersebut dikombinasikan
dengan tujuan mengefisiensikan pemakaian saluran komunikasi yang ada.
Filter digital adalah sebuah implementasi algoritma matematik ke dalam
perangkat keras dan/atau perangkat lunak yang beroperasi pada sebuah sinyal
input digital untuk menghasilkan sebuah output sinyal digital agar tujuan
pemfilteran tercapai. Filter digital memainkan peranan yang sangat penting dalam
pemrosesan sinyal digital[4].
Beberapa keuntungan penggunaan filter digital adalah:
1. Filter digital bisa di program (programmable). Operasi yang dilakukan dapat
deprogram yang kemudian dapat disimpan di memori prosesor. Hal ini
menunjukkan filter digital mudah untuk diubah melalui program tanpa
mengubah rangkaian elektroniknya ( hardware).
2. Filter digital lebih mudah didesain, dites dan diimplementasikan.
3. Karakteristik rangkaian filter analog tergantung perubahan temperatur. Filter
digital tidak terpengaruh perubahan temperatur dan sangat stabil.
4. Filter digital mampu bekerja pada sinyal frekuensi rendah dengan akurat.
5. Filter digital serbaguna dalam kemampuannya memproses berbagai sinyal,
seperti filter adaptif yang mampu menyesuaikan terhadap perubahan sinyal.
Dalam kawasan waktu karakteristik filter digital dinyatakan dengan
persamaan:
�(�) =�(1)�(�) +�(2)�(� −1) +⋯+�(��+ 1)�(� − ��)− �(2)�(� −1)− ⋯
Dimana x(n) adalah masukan, y(n) merupakan keluaran dan konstanta b(i) dan
a(i) adalah koefisien filter serta orde maksimal filter dinyatakan oleh na dan nb.
Dengan tranformasi z dalam kawasan frekuensi filter digital dinyatakan
dalam persamaan sebagai berikut:
�
(
�
) =
�(1)+�(2)�−1+⋯+�(��+1)�−��1+�(2)�−1+⋯+�(��+1)�−��
�
(
�
)
(2.4)
Berbagai macam nama digunakan untuk menggambarkan filter tergantung
dari na dan nb. Jika nb=0 sering disebut dengan IIR (infinite impulse response),
all-pole, recursive atau autoregressive. Jika na=0 filter ini sering disebut
FIR(finite impulse response), all-zero, nonrecursive atau autoregressive moving
average(ARMA).
Finite Impulse Response (FIR) merupakan salah satu filter digital yang
mempunyai unit sample response yang berhingga. Karakteristik dari filter FIR
dapat dilihat pada persamaan berikut:
Filter digital FIR dapat dituliskan dengan persamaan[4]:
�(�) = ∑�−1�=0ℎ(�)�(� − �)
(2.5)
�(�) = ∑�−1�=0ℎ(�)�−1
(2.6)
Dimana : k = 0,1,….,N-1 adalah respons impuls atau koefisien dari filter
H(z) adalah fungsi alih dari filter
N adalah panjang dari filter yang merupakan jumlah dari koefisien filter.
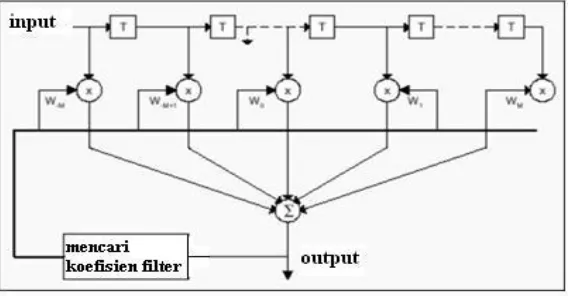
Diagram blok filter digital dapat dilihat pada Gambar 2.6[4].
Berdasarkan diagram blok tersebut secara garis besar filter digital dapat dibagi
menjadi dua yaitu filter digital dengan tanggapan impuls berhingga (FIR) dan
1
W W2 WL−1
∑ ∑ ∑
1 −
Z
Y(n)
output x(n)
input
X(n-1) X(n-2) X(n-L+1)
0
W
1 −
Z
1 −
Z
Gambar 2.6 Blok Diagram Dari Bentuk Langsung Filter Digital FIR
Persamaan 2.8 adalah persamaan selisih untuk FIR, ini adalah persamaan
dalam domain waktu dan menyatakan filter FIR dalam bentuk tidak rekursif yaitu
output pada suatu saat, y(n) merupakan sebuah fungsi yang hanya bergantung
pada input yang sebelumnya dan input yang sekarang, x(n). Jika filter FIR
dinyatakan dengan persamaan 2.5 maka filter tersebut akan selalu stabil.
Persamaan 2.6 merupakan fungsi alih dari filter, persamaan ini digunakan untuk
maenganalisa tanggapan frekuensi dari filter.
Filter FIR (nonrecursive) sering digunakan pada aplikasi filter adaptif dari
ekualizer adaptif pada sistem komunikasi digital sistem pengontrol noise adaptif.
Adapun kelebihan filter adaptif FIR adalah:
1. Stabilitasnya bisa dikontrol dengan mudah dengan memastikan koefisien
filter terbatas.
2. Lebih mudah dan algoritma yang efisien untuk pengaturan koefisien filter.
3. Kinerja algoritma ini bisa lebih mudah dimengerti pada bagian konvergen
dan stabilitas
Realisasi struktur untuk filter FIR adalah penggambaran fungsi alih filter
ke dalam bentuk blok diagram. Struktur yang sering dipakai adalah struktur
transversal yang diperoleh langsung dari persamaan 2.6 dan digambarkan pada
1
−
Z
y(n)
input
1
−
Z
1
−
Z
x x x x
+
-0
w
w
1w
2w
N−1eq
y
x(n) e(n)
Gambar 2.7 Struktur Tranversal Filter FIR
z-1 melambangkan penundaan sebesar satu satuan waktu pencuplikan. Pada implementasi ke dalam program kotak dengan label z-1 dapat direalisasikan dengan shift register atau lokasi memori pada sebuah RAM.
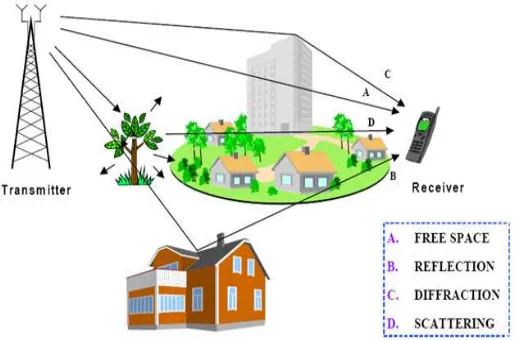
2.5 Fading Rayleigh
Pada sistem komunikasi amplitudo terdapat gangguan khusus berupa
komponen multipath dari sinyal yang dipancarkan. Multipath merupakan jalur
propagasi yang berbeda-beda, yang dilalui sinyal antara pengirim dan penerima,
yang disebabkan karena pantulan oleh halangan-halangan dan benda-benda yang
ada sepanjang propagasi. Lingkungan kanal multipath ditunjukkan pada Gambar
Perbedaan jalur propagasi menimbulkan komponen multipath dari sinyal
yang dipancarkan tiba pada penerima melalui jalur propagasi yang berbeda dan
pada waktu yang berbeda pula. Perbedaan waktu tiba pada penerima tersebut
menyebabkan sinyal yang diterima mengalami interferensi, yang akan
menimbulkan fenomena fluktuasi amplitudo dan fasa sinyal yang diterima, dan
menimbulkan fenomena mendasar yang disebut fading.
Ada tiga mekanisme dasar yang terjadi pada propagasi sinyal dalam
komunikasi bergerak, yaitu :
1. Refleksi, terjadi ketika gelombang elektromagnet yang merambat
mengenai permukaan halus dengan dimensi besar dibandingkan dengan
panjang gelombang sinyal.
2. Difraksi, terjadi ketika lintasan radio terhalang oleh objek padat yang lebih
besar dari pada panjang gelombang sinyal. Biasa disebut juga dengan
shadowing.
3. Hamburan, terjadi ketika gelombang yang merambat mengenai permukaan
kasar dengan dimensi yang lebih besar dibandingkan dengan panjang
gelombang sinyal atau mengenai permukaan yang berdimensi kecil.
Fluktuasi amplitudo sinyal yang terjadi adalah acak dan tidak dapat
ditentukan sebelumnya, besar dan kapan terjadinya. Namun berdasarkan
penelitian, fading tersebut dapat diperkirakan secara statistik, berupa perubahan
nilai secara acak dengan distribusi tertentu. Salah satu distribusi tersebut
Distribusi Rayleigh. Distribusi Rayleigh merupakan salah satu distribusi yang
dapat menjadi model untuk mewakili fading, sehingga fading memiliki Distribusi
Rayleigh ini disebut Fading Rayleigh.
Pada Fading Rayleigh, setiba sinyal yang melalui jalur yang
berbeda-beda tersebut, memberikan sejumlah energi yang sama terhadap sinyal gabungan
yang ada pada penerima. Sinyal yang dipengaruhi Fading Rayleigh yang sampai
pada penerima dapat dipresentasikan dengan persamaan[2]:
Dimana : r (t) = fluktuasi amplitudo sinyal e(t) sebagai fungsi waktu = |�(�)|
�(�) = fluktuasi fasa sinyal e(t) sebagai fungsi waktu = ∠�(�)
Fluktuasi amplitudo gelombang pembawa pada sinyal yang dipengaruhi Fading
Rayleigh mengikuti Distribusi Rayleigh, dengan persamaan[2].
�
(
�
) =
� �2�
−�2�2�2�
dengan ( r ≥ 0) (2.8)
Dimana: p(r) = fungsi kepadatan probabilitas munculnya r
r = amplitudo acak
�
2=
varians pdfDistribusi Rayleigh seperti dapat dibangkitkan melalui pembangkitan
distribusi Gamma. Distribusi ini memiliki kepadatan probabilitas sebagai
berikut[2]:
�
(
�
) =
���(�−1)�−��(�−1)!
(2.9)
Dimana : � = konstanta positif
� = konstanta integer positif
Distribusi Gamma ini memiliki mean, �= �/� dan varians, �2 = �
�2 = �/�.
Distribusi Rayleigh merupakan distribusi Gamma dengan �= 3 dan �= 3.
Distribusi Gamma dapat dibangkitkan dengan menjumlahkan bilangan acak
eksponensial sebanyak �, dengan persamaan sebagai berikut[3]:
�=−1�∑��=1���� (2.10)
Dimana Ui adalah bilangan acak antara 0 dan 1 berdistribusi uniform.
�= − �1
�� �� ∏ ��
�
�=1
(2.11)
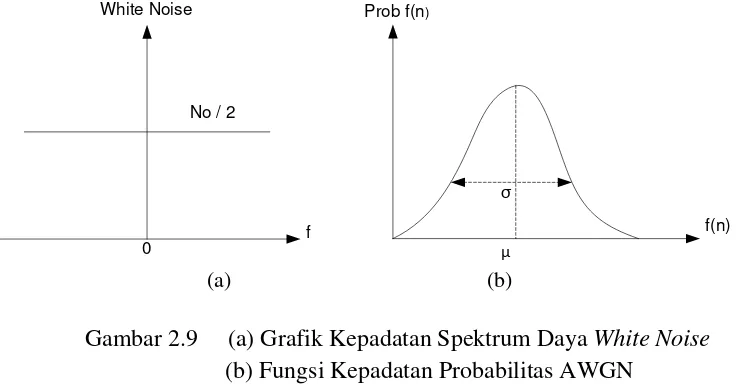
2.6 AWGN (Additive White Gaussian Noise)
Salah satu jenis noise yang ada pada sistem komunikasi adalah noise
thermal. Noise thermal ini disebabkan oleh pergerakan-pergerakan elektron di
dalam konduktor yang ada pada sistem telekomunikasi, misalnya pada perangkat
penerima. Pada bidang frekuensi, noise thermal ini memiliki nilai kepadatan
spektrum daya yang sama untuk daerah frekuensi yang lebar, yaitu sebesar N0/2,
seperti yang dapat dilihat pada Gambar 2.9 (a) sedangkan fungsi kepadatan
probabilitas AWGN ditunjukkan pada Gambar 2.9(b)[1].
Prob f(n)
f(n)
µ σ
White Noise
No / 2
f 0
(a) (b)
Gambar 2.9 (a) Grafik Kepadatan Spektrum Daya White Noise
(b) Fungsi Kepadatan Probabilitas AWGN
Pergerakan elektron menyebabkan noise thermal bersifat acak, sehingga
besarnya noise thermal juga berubah secara acak terhadap waktu. Perubahan
secara acak tersebut dapat diperkirakan secara statistik, yaitu mengikuti Distribusi
Gaussian, dengan rata-rata nol. Noise ini merusak sinyal dalam bentuk aditif, yaitu
ditambahkan ke sinyal utama, sehingga noise thermal pada perangkat penerima ini
disebut Additive White Gaussian Noise (AWGN). Persamaan Distribusi Gaussian
yang mewakili AWGN yaitu[1]:
�
(
�
) =
�−� �2 2�2�
√2��2 (2.12)
varians memiliki nilai :
�
2=
�02��
(2.13)
Dimana �0 2
=
����
2 adalah kerapatan spectral daya dari noise Tb adalah laju bit. Sehingga :
�
2=
����2
(2.14)
Dimana : k = konstanta Boltzman (1,38.10-23 J/K)
Ts = temperatur noise (K)
B = bandwith noise (Hz)
AWGN memiliki distribusi Gaussian, yang juga disebut Distribusi Normal.
Distribusi ini memiliki kepadatan probabilitas yang simetris dan berbentuk seperti
lonceng, dan fungsi kepadatan dinyatakan dengan[2]:
�
(
�
) =
1�√2�
��� �−
1 2[
�−� �
]
2�
(2.15)
Dimana : µ = rata-rata x x = nilai data
� = standar deviasi � = 3.14
Persamaan di atas merupakan fungsi kerapatan probabilitas untuk distribusi
standar normal. Proses pembangkitan ini mula-mula membangkitkan sebuah
variabel Z dengan persamaan[2]:
�= (−2���1)12sin (2��2) (2.16)
Dimana Ui dan U2 adalah bilangan acak antara 0 sampai 1 yang berdistribusi
Uniform. Nilai distribusi normal, X didapat dari persamaan[2].
2.7 Ekualizer
Ekualizer merupakan alat yang digunakan untuk memperbaiki data yang
rusak akibat distorsi kanal. Ekualizer merupakan filter digital yang dipasang pada
sisi penerima yang bertujuan agar sinyal yang masuk pada sisi penerima tidak lagi
berupa sinyal yang mengalami interferensi. Untuk kanal komunikasi yang
karakteristiknya tidak diketahui filter di penerima tidak dapat didesain secara
langsung. Proses ekualisasi dapat mengurangi efek ISI (IntersymbolInterference),
dan noise untuk demodulasi yang lebih baik[2].
Ada beberapa jenis ekualizer diantaranya :
1. Maximum Likelihood (ML) Sequence Detection, ekualizer jenis ini bekerja
secara optimal namun tidak ada dalam praktik.
2. Linear Equalization, ekualizer jenis ini bekerja tidak begitu optimal
namun sederhana.
3. Non-Linear Equalization, ekualizer jenis ini digunakan untuk beberapa
jenis ISI.
Linear equalization sangat mudah diimplementasikan dan sangat efektif untuk
kanal yang tidak mengandung ISI (seperti kanal dalam kabel telepon) maupun
kanal yang mengandung ISI (seperti kanal wireless). Kebanyakan linear equalizer
diimplementasikan sebagai linear transversal filter. Struktur ekualizer seperti yang
[image:30.595.171.455.561.709.2]ditunjukkan pada Gambar 2.10[2].
2.8 Algoritma Least Mean Fourth Based Power Of Two Quantizer
(LMF-PTQ)
LMF-PTQ adalah salah satu algoritma untuk sistem adaptif yang baru dan
belum banyak digunakan. Sistem adaptif ini adalah sistem yang dirancang untuk
mengatasi gangguan dari berbagai sumber yang berubah-ubah dengan
menyesuaikan terhadap perubahan yang terjadi. Tujuan dari sistem adaptif ini
adalah mencari dan mendapatkan sistem optimum yang dapat diimplementasikan.
Sistem adaptif ini diharapkan akan mampu mengatasi perubahan akibat beragam
gangguan. Sistem adaptif bisa dijadikan pilihan solusi bila karakteristik gangguan
tidak diketahui atau sifat gangguan tersebut berubah-ubah. Sistem ini sering
digunakan atau diidentifikasi sistem, prediksi, menghilangkan interferensi yang
banyak ditemukan dalam telekomunikasi.
Algoritma LMF-PTQ ini diperkenalkan oleh Duttweiler. LMF-PTQ ini
memberikan sebuah pendekatan baru yang secara efektif mengatasi 2 kesulitan
utama yaitu mengoptimalkan di lingkungan non-Gaussian dan mengurangi
perubahan saluran yang mengganggu penggunaan LMF adaptif . Pendekatan baru
ini terinspirasi dari karya yang menunjukkan bahwa LMF, yang pada dasarnya
bergantung pada fungsi biaya non-mean square. Kombinasi dari LMF dan PTQ
pada Tugas Akhir ini juga memberikan derivasi dari pendekatan linier baru dan
sangat berguna dari PTQ input / output karakteristik. Pendekatan linier ini sangat
menyederhanakan analisis kinerja yang diusulkan LMF-PTQ ekualizer.
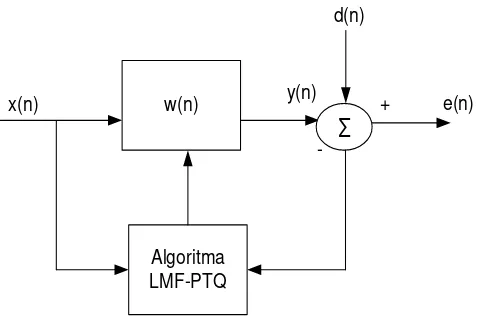
Model saluran linear dengan tap ekualizer ditunjukkan pada Gambar
w(n)
Algoritma LMF-PTQ
∑ e(n)
d(n)
y(n)
-+ x(n)
Gambar 2.11 Adaptive System Equalizer
Input ekualizer dapat ditulis sebagai[6] :
�(�) =��−1�=0 h(i)a(n−i) + v(n) ( 2.18)
di mana: h (i), i = 0, 1,. . , N-1 adalah impuls kanal tanggapan,
N adalah panjang filter,
(n) menunjukkan data sampel n,
ν (n) adalah aditif noise ditambahkan ke n saluran mewakili panjang
ekualizer.
Output ekualizer diperkirakan y (n), didefinisikan sebagai:
�(�) = �^T (�)�(�) (2.19)
di mana w (n) = [w (0), w (1), · · ·, w (N - 1)] T adalah nilai bobot adaptif, superscript T menandakan transpose operasi, dan x (n) = [x (n), x (n - 1), · · ·, x (n
– N +1)] T merupakan vektor masukan. w (n), diperbarui oleh algoritma LMF menurut:
[image:32.595.200.440.88.248.2]di mana μ adalah konstanta langkah-ukuran yang mengontrol stabilitas dan tingkat konvergensi dan e (n) adalah kesalahan output sistem contoh pada saat n dan
ditemukan oleh:
�(�) =���(�) +�(�) (2.21)
�(�) = �(�)− ��(�)�(�) (2.22)
dimana d (n) adalah sinyal yang diinginkan.
z (n) adalah noise dan model error.
Power of two quantizer ini didefinisikan oleh Duttweiler sebagai:
�(�) = 2[ln|�|]���(�) (2.23)
di mana u adalah bilangan bulat terbesar kurang dari u dan sgn (u) adalah tanda u
didefinisikan sebagai:
���(�) = �1 � ≥0 −1 � < 0
Analisis dari quantizer power-of-dua bit terbatas dimasukkan dengan algoritma
LMS diberikan oleh Xue dan Liu di mana mereka telah menunjukkan bahwa B-bit
power-of-two quantizer mengkonversi sebuah u masukan untuk kata "satu-bit"
menurut:
�(�) =�
���(�) |�|≥1
2[ln|�|]���(�) 2 −�+1 ≤|�| < 1 0 |�| < 2−�+1
(2.24)
Penyederhanaan persamaan (2.24) dan diterapkan untuk LMF algoritma dan
mengakibatkan LMF berbasis power-of-two quantizer (LMF-PTQ). Untuk
memperbarui algoritma (2.20), update koefisien equalizer adalah dilakukan sesuai
dengan:
�(�+ 1) = �(�) + 2��[�3(�)]���[�(�)] (2.25)
�[�3(�)] =�
���[�(�)] |�(�)|≥1 2[3 ln|�(�)|]���[�(�)] 2−�+13
0 |�(�)| < 2−�+13
≥|�(�)| < 1 (2.26)
Untuk kestabilan ekualizer LMF-PTQ digunakan step size yang dapat diatur
yaitu[6]:
0 <� < 7��8 ��
2
� (2.27)
Dimana �� adalah varians.
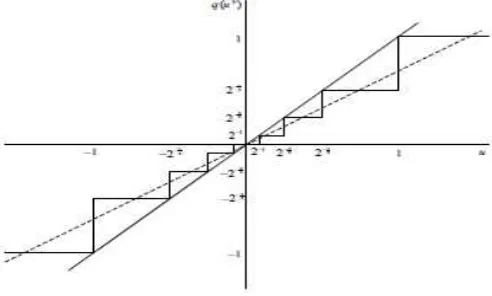
Perhatikan di sini bahwa (2.26) diperoleh dari persamaan (2.24) dengan
[image:34.595.182.428.312.460.2]mengganti input u quantizer oleh e3 (n). Akhirnya, Gambar 2.12 menggambarkan karakteristik transfer dari kuantizer seperti dengan B = 4 bit.
Gambar 2.12 Input-Output karakteristik dari 4-bit power-of-two quantizer.
2.9 Signal To Noise Ratio (SNR)
Signal to Noise Ratio (SNR) adalah perbandingan daya suatu sinyal terhadap
daya noise yang muncul pada titik tertentu dalam transmisi. Biasanya, SNR diukur
pada sebuah penerima, karena nantinya untuk memproses sinyal yang diterima
dan menghilangkan derau yang tidak diinginkan dengan persamaan[7]:
(���)�� = 10���10(��
��) ( 2.26)
Dimana Ps = power signal (daya sinyal)
Signal to Noise Ratio (SNR) digunakan untuk menentukan batas atas
terhadap jumlah data yang mampu diperoleh dari kanal komunikasi. Shannon
mengemukakan bahwa kapasitas kanal komunikasi maksimum, dalam bit
perdetik, ditentukan dengan persamaan:
� =����2(1+SNR) (2.27)
Dimana C = kapasitas kanal komunikasi dalam bit perdetik,
B = bandwidth kanal komunikasi dalam Hertz
Persamaan Shannon tersebut menggambarkan nilai maksimum teoritas yang dapat
dicapai oleh system komunikasi. Sedangkan dalam praktiknya, bagaimanapun
juga, jumlah data yang dapat ditransmisikan lebih rendah dari ketentuan Shannon
tersebut. Satu alasan untuk hal ini adalah ketentuan Shannon tersebut berasumsi
hanya pada white noise (derau suhu) saja. Batasan Shannon adalah bahwa
kapasitas kanal komunikasi C tidak boleh lebih kecil dari jumlah informasi yang
akan dikirim.
2.10 Symbol Error Rate (SER)
Untuk mengukur performansi atau unjuk kerja dari sistem yang
direncanakan parameter yang dijadikan acuan adalah Symbol Error Rate (SER).
Symbol Error Rate (SER) adalah pengukuran kualitas dari sinyal yang diterima
untuk sistem komunikasi digital. Hasil pengukuran SER tersebut tidak subjektif
sehingga pengguna data sangat menuntut SER yang kecil. Semakin kecil nilai
SER berarti menunjukkan performansi yang semakin bagus, karena menunjukkan
semakin kecilnya kesalahan simbol data yang diterima. Nilai Symbol Error Rate
(SER) diperoleh dengan membandingkan jumlah kesalahan simbol yang diterima
dengan jumlah simbol yang dikirimkan, mengikuti ketentuan dengan
persamaan[7]:
���
=
��BAB III
PERMODELAN EKUALIZER DAN SISTEM KOMUNIKASI
3.1 Umum
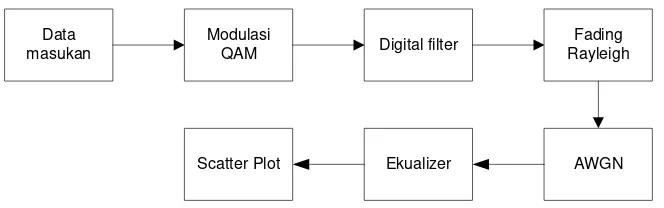
Penganalisisan suatu sistem yang efektif adalah dengan cara memodelkan
dan menjalankan sistem tersebut. Permodelan merupakan penggambaran dari
sistem yang sebenarnya. Pada Tugas Akhir ini penganalisisan kinerja ekualizer
dapat dimodelkan seperti Gambar 3.1.
Data masukan
Modulasi
QAM Digital filter
Fading Rayleigh
AWGN Ekualizer
[image:36.595.147.479.329.433.2]Scatter Plot
Gambar 3.1 Permodelan Ekualizer dan Sistem Komunikasi
Struktur simulasi ini dimulai dari pembangkitan data masukan yang
merupakan bilangan acak berdistribusi uniform kemudian dimodulasi
ditambahkan filter digital kemudian dirusak kembali penambahan faktor
pengganggu kinerja sistem yaitu Fading Rayleigh dan AWGN atau noise lalu
simbol yang telah dirusak tersebut masuk kedalam blok ekualizer disinilah simbol
tersebut diperbaiki atau dibentuk kembali sinyal asalnya sehingga error dapat
diminimalisasi dan kemudian dihitung besarnya Symbol Error Rate (SER).
3.2 Asumsi-Asumsi Yang Digunakan
Adapun asumsi-asumsi yang digunakan pada permodelan LMF-PTQ
1. Modulasi yang digunakan QAM
2. Pengkodean menggunakan LMF-PTQ code
3. Noise yang digunakan adalah AWGN, yaitu noise yang terdapat pada
semua spektrum frekuensi dan merupakan noise thermal yang sifatnya
menjumlah.
3.3 Parameter Kinerja Sistem
Adapun parameter yang digunakan pada permodelan LMF-PTQ ekualizer
adalah:
a. Jumlah data
b. Jumlah simbol
c. Rentang SNR yang dipakai
d. Panjang filter
e. Step size
3.4 Algoritma LMF-PTQ
Dalam perancangan program diperlukan algoritma perancangan yang
digunakan sebagai langkah-langkah yang harus dilakukan dalam membuat suatu
program. Pembuatan algoritma ini bertujuan agar langkah-langkah yang akan
dilakukan tersusun dengan benar. Pada Tugas Akhir ini flowchart atau diagram
Mulai
Penentuan parameter awal 1. Jumlah data 2. Jumlah simbol
3. panjang filter 4. panjang kanal
5. Step Size
6.SNR
Pembangkitan modulasi QAM
Pembangkitan digital filter
Penambahan Fading Rayleigh
Penambahan AWGN
Iterasi For i=1:M-10
Hitung Keluaran y(n)
Hitung Sinyal Error e(n)
Iterasi Berakhir?
Hitung SER
Tampilkan Hasil Plot
Selesai A
A
Ya
Tidak Pembangkitan
LMF-PTQ Ekualizer
Estimasi update ekualizer w(n)
[image:38.595.115.484.72.660.2]ya
3.5 Tahapan Pemrograman
Adapun tahapan pemrograman dapat dilakukan dengan beberapa cara, antara
lain sebagai berikut:
1. Membangkitkan Data Masukan
Parameter yang akan digunakan meliputi : jumlah data yang diambil secara
acak sebanyak 3000 data, jumlah simbol sebanyak 2000, rentang SNR yang
dipakai 15 sampai 27, panjang filter mulai dari 20 sampai 41, jumlah bit per
simbol sesuai dengan jumlah modulasi, iteration step size mulai dari 0.001 sampai
0.032.
2. Pembangkitan Modulasi QAM
Pembangkitan modulasi sinyal dengan menggunakan modulasi QAM
menggunakan perintah:
s=round(rand(1,T))*2-1; % 4 QAM symbol sequence
s=s+sqrt(-1)*(round(rand(1,T))*2-1);
3. Pembangkitan Filter Digital FIR
Filter digital disini adalah sebuah implementasi algortimatik kedalam
perangkat keras/lunak yang beroperasi pada sebuah sinyal input digital untuk
menghasilkan sebuah output digital agar tujuan pemfilteran tercapai yaitu
mengefisiensikan kanal komunikasi yang ada. Program simulasinya adalah:
x=filter(h,1,s)
4. Penambahan Fading Rayleigh
Pada simulasi ini permodelan kanalnya menggunakan kanal yang
berdistribusi Rayleigh. Bentuk simulasinya sebagai berikut :
h=randn(1,Lh+1)+sqrt(-1)*randn(1,Lh+1);
5. Penambahan AWGN
Noise yang digunakan adalah AWGN, yaitu noise yang terdapat pada semua
spektrum frekuensi dan merupakan noise thermal yang sifatnya menjumlah. Pada
simulasi dituliskan sebagai berikut:
vn=randn(1,T)+sqrt(-1)*randn(1,T); % AWGN noise
(complex)
vn=vn/norm(vn)*10^(-dB/20)*norm(x); % adjust noise power
with SNR dB value
SNR=20*log10(norm(x)/norm(vn)) % Check SNR of the
received samples
6. Pembangkitan Ekualizer LMF-PTQ
Berikut adalah program pembangkitan Ekualizer LMF-PTQ:
Lp=T-N; %% remove several first samples to avoid 0
or
negative subscript
X=zeros(N+1,Lp); % sample vectors (each column is a sample
vector)
for i=1:Lp
X(:,i)=x(i+N:-1:i).';
end
e=zeros(1,M-10); % used to save instant error
w=zeros(N+1,1); % initial condition
7. Estimasi Ekualizer LMF-PTQ
Berikut merupakan program estimasi ekualizer LMF-PTQ:
for i=1:M-10
berikut adalah program untuk menghitung keluaran y(n):
berikut adalah program untuk menghitung program keluaran e(n):
e(i)=s(i+10+N-P)-w'*X(:,i+10); % instant error
berikut adalah program estimasi update ekualizer:
mutlak = abs(e(i));
if mutlak >=1 qe3=sign(e(i))
elseif mutlak <0.5 qe3=0
else qe3 = 2*(exp(3*log(abs(e(i)))))*sign(e(i))
end
w=w+2*mu*qe3*sign(s(i+10+N-P)); % update equalizer
estimation
i_e=[i/10000 abs(e(i))] % output
information
end
sb=w'*X; % estimate symbols (perform equalization)
8. Perhitungan SER LMF-PTQ
Berikut adalah program perhitungan SER:
sb1=sb/norm(w); % scale the output
sb1=sign(real(sb1))+sqrt(-1)*sign(imag(sb1)); % perform
symbol detection
start=7; % carefully find the corresponding begining point
sb2=sb1-s(start+1:start+length(sb1)); % find error symbols
SER=length(find(sb2~=0))/length(sb2) % calculate SER
9. Pembangkitan Gambar (Scatter Plot) Hasil Simulasi
Pembangkitan scatter plot dilakukan dengan menggunakan program berikut:
subplot(221),
plot(s,'o'); % show the pattern of transmitted symbols
grid,title('Transmitted symbols');
xlabel('Real'),ylabel('Image')
axis([-2 2 -2 2])
subplot(222),
plot(x,'o'); % show the pattern of received samples
grid, title('Received samples'); xlabel('Real'),
ylabel('Image')
subplot(223),
plot(sb,'o'); % show the pattern of the equalized
symbols
grid, title('Equalized symbols'), xlabel('Real'),
ylabel('Image')
Program secara lengkap dapat dilihat pada lampiran yaitu pada halaman
BAB IV
ANALISIS UNJUK KERJA EKUALIZER PADA
SISTEM KOMUNIKASI
4.1 Umum
Pada bab ini akan diuraikan tentang hasil simulasi yang telah dilakukan
dengan bantuan perangkat lunak Matlab dan analisisnya. Pengujian diamati pada
penerima. Selanjutnya dilakukan berbagai simulasi pengujian dengan mengubah
nilai variabel yang ada sesuai dengan kebutuhan. Yang akan dianalisis untuk
melihat kinerja SER pada sistem komunikasi menggunakan algoritma LMF-PTQ
adalah pengujian Symbol Error Rate (SER) yang berdasarkan pada rentang SNR,
panjang filter dan rentang step size yang dipakai.
4.2 Analisis Kinerja Ekualizer Dengan Algoritma LMF-PTQ
Analisis ini dilakukan untuk mengetahui besarnya probabilitas error (SER)
yang terjadi pada sistem komunikasi dengan menggunakan algoritma LMF-PTQ.
Adapun masukan-masukan pada analisis ini adalah sebagai berikut:
Jumlah data : 3000
Jumlah bit : 2000
Panjang kanal : 5
Rentang SNR : 15 sampai 27
Panjang filter : 20 sampai 41
4.3 Pengaruh SNR Terhadap Nilai SER Tanpa Ekualizer
Simulasi ini bertujuan untuk mengetahui pengaruh SNR yang digunakan
terhadap nilai SER. Tabel 4.1 ini menunjukkan hasil simulasi dari SNR yang
[image:44.595.113.472.537.728.2]berpengaruh terhadap nilai SER.
Tabel 4.1 Pengaruh Nilai SNR Terhadap SER Tanpa Ekualizer
SNR SER
15 1
16 1
17 1
18 1
19 1
20 1
21 1
22 1
23 1
24 1
25 1
26 1
27 1
Dari Tabel 4.1 dapat dilihat bahwa nilai SER akan bernilai konstan yaitu 1
apabila rentang SNR semakin besar. Gambar 4.1 (a), (b), (c) menunjukkan hasil
simulasi tanpa ekualizer.
(a) (b)
-2 -1 0 1 2
-2 -1 0 1 2
Transmitted symbols
Real
Im
age
-2 -1 0 1 2
-2 -1 0 1 2
Received samples
Real
Im
(c)
Gambar 4.1 Scatter Plot Hasil Simulasi Tanpa Ekualizer Pada Saat SNR = 25 dB.
Gambar 4.1 (a) adalah simbol awal yang akan diproses. Gambar 4.1 (b)
adalah simbol setelah diganggu oleh noise atau AWGN. Gambar 4.1 (c) adalah
gambar setelah diproses tanpa ekualizer.
4.4 Pengaruh Panjang Filter Terhadap Nilai SER Tanpa Ekualizer
Simulasi ini bertujuan untuk mengetahui pengaruh panjang filter yang
digunakan terhadap nilai SER. Tabel 4.2 ini menunjukkan hasil simulasi dari
[image:45.595.225.400.473.667.2]panjang filter yang berpengaruh terhadap nilai SER.
Tabel 4.2 Pengaruh Panjang Filter Terhadap SER Tanpa Ekualizer
N SER
20 1
21 1
23 1
25 1
27 1
29 1
31 1
33 1
35 1
37 1
39 1
41 1
Dari Tabel 4.2 dapat dilihat bahwa semakin besar nilai panjang filter maka
nilai SERnya konstan yaitu bernilai 1. Gambar 4.2 (a), (b), (c) menunjukkan hasil
-2 -1 0 1 2
-2 -1 0 1 2
Equalized symbols
Real
Im
(a) (b)
[image:46.595.130.482.90.471.2](c)
Gambar 4.2 Scatter Plot Hasil Simulasi Tanpa Ekualizer Pada Saat Panjang
Filter = 37
Gambar 4.2 (a) adalah simbol awal yang akan diproses. Gambar 4.2 (b)
adalah simbol setelah diganggu oleh noise atau AWGN. Gambar 4.2 (c) adalah
gambar setelah diproses tanpa ekualizer.
4.5 Pengaruh SNR Terhadap Nilai SER Dengan Algoritma LMF-PTQ
Simulasi ini bertujuan untuk mengetahui pengaruh SNR yang digunakan
terhadap nilai SER. Tabel 4.3 ini menunjukkan hasil simulasi dari SNR yang
berpengaruh terhadap nilai SER.
-2 -1 0 1 2
-2 -1 0 1 2
Transmitted symbols
Real
Im
age
-2 -1 0 1 2
-2 -1 0 1 2
Received samples
Real
Im
age
-2 -1 0 1 2
-2 -1 0 1 2
Equalized symbols
Real
Im
Tabel 4.3 Pengaruh Nilai SNR Terhadap SER menggunakan Ekualizer
LMF-PTQ
SNR SER
15 0.8067 16 0.7567 17 0.8211 18 0.7648 19 0.7023 20 0.8218 21 0.8131 22 0.6607 23 0.7661 24 0.8128 25 0.8151 26 0.7577 27 0.7094
Dari Tabel 4.3 dapat dilihat bahwa semakin besar SNR maka semakin kecil
SERnya berarti semakin besar daya sinyal yang dikirimkan menghasilkan SER
yang bagus. Semakin besar nilai SNR yang diberikan maka mempengaruhi
penurunan ISI secara baik. Dari Tabel 4.3 juga dapat dilihat bahwasanya ekualizer
juga bekerja dengan baik karena menghasilkan nilai SER yang semakin kecil
apabila nilai SNR semakin besar. Untuk SNR mulai dari 15 dB sampai 27 dB
besarnya SER 0.8067 sampai dengan 0.7094. Gambar 4.3 (a), (b), (c)
menunjukkan hasil simulasi ekualizer LMF-PTQ
(a) (b)
-2 -1 0 1 2
-2 -1 0 1 2
Transmitted symbols
Real Image
-2 -1 0 1 2
-2 -1 0 1 2
Received samples
Real
Im
[image:48.595.218.387.95.282.2]
(c)
Gambar 4.3 Scatter Plot Hasil Simulasi Ekualizer Pada Saat SNR = 25 dB
Gambar 4.3 (a) adalah simbol awal yang akan diproses. Gambar 4.3 (b)
adalah simbol setelah diganggu oleh noise atau AWGN. Gambar 4.3 (c) adalah
gambar setelah diproses didalam ekualizer. Disini terlihat bahwa simbol setelah
diganggu oleh noise akan bertumpuk, namun setelah diekualisasi simbol tersebut
perlahan mulai menyebar kembali membentuk seperti simbol awal, namun belum
begitu terlihat jelas tumpukannya memisah.
4.6 Pengaruh Panjang Filter Terhadap Nilai SER Dengan Algoritma
LMF-PTQ
Simulasi ini bertujuan untuk mengetahui pengaruh panjang filter yang
digunakan terhadap nilai SER. Tabel 4.4 ini menunjukkan hasil simulasi dari
[image:48.595.226.399.668.745.2]panjang filter yang berpengaruh terhadap nilai SER.
Tabel 4.4 Pengaruh Panjang Filter Terhadap SER menggunakan Ekualizer
LMF-PTQ
N SER
20 0.6856 21 0.8214 23 0.7964 25 0.7597
-2 -1 0 1 2
-2 -1 0 1 2
Equalized symbols
Real
Im
Tabel 4.4 Lanjutan
N SER
27 0.7477 29 0.8011 31 0.7551 33 0.6866 35 0.7852 37 0.6878 39 0.7909 41 0.7171
Dari Tabel 4.4 dapat dilihat bahwa semakin besar nilai panjang filter maka
semakin besar SERnya artinya hasil ekualizernya tidak baik. Untuk panjang filter
mulai dari 20 sampai 41 besarnya SER 0.6856 sampai dengan 0.7171. Gambar 4.4
(a), (b), (c) menunjukkan hasil simulasi ekualizer LMF-PTQ.
(a) (b)
(c)
-2 -1 0 1 2
-2 -1 0 1 2
Transmitted symbols
Real
Im
age
-2 -1 0 1 2
-2 -1 0 1 2
Received samples
Im
age
-2 -1 0 1 2
-2 -1 0 1 2
Equalized symbols
Im
[image:49.595.146.490.405.722.2]Gambar 4.4 (a) adalah simbol awal yang akan diproses. Gambar 4.4 (b)
adalah simbol setelah diganggu oleh noise atau AWGN. Gambar 4.4 (c) adalah
gambar setelah diproses didalam ekualizer. Disini terlihat bahwa simbol setelah
diganggu oleh noise akan bertumpuk, namun setelah diekualisasi simbol tersebut
perlahan mulai menyebar kembali membentuk seperti simbol awal, namun belum
begitu terlihat jelas tumpukannya memisah.
4.7 Pengaruh Step Size Terhadap Nilai SER Dengan Algoritma LMF-PTQ
Simulasi ini bertujuan untuk mengetahui pengaruh step size yang digunakan
terhadap nilai SER. Tabel 4.5 ini menunjukkan hasil simulasi dari panjang filter
[image:50.595.222.401.396.655.2]yang berpengaruh terhadap nilai SER.
Tabel 4.5 Pengaruh Panjang Filter Terhadap SER menggunakan Ekualizer
LMF-PTQ
mu SER
0.001 0.8242 0.002 0.8248 0.004 0.8248 0.006 0.6852 0.008 0.6859 0.010 0.6852 0.012 0.6866 0.014 0.6872 0.016 0.6866 0.018 0.6856 0.020 0.6852 0.022 0.6852 0.024 0.6849 0.026 0.6852 0.028 0.6846 0.030 0.6849 0.032 0.6849
Dari Tabel 4.5 dapat dilihat bahwa semakin besar step size maka semakin
kecil SERnya. Semakin besar nilai step size yang diberikan maka mempengaruhi
juga bekerja dengan baik karena menghasilkan nilai SER yang semakin kecil
apabila nilai step size semakin besar. Untuk step size mulai dari 0.001 sampai
0.032 besarnya SER 0.8242 sampai dengan 0.6849. Gambar 4.5 (a), (b), (c)
menunjukkan hasil simulasi ekualizer LMF-PTQ.
(a) (b)
[image:51.595.153.490.210.566.2](c)
Gambar 4.5 Scatter Plot Hasil Simulasi Ekualizer Pada Saat Step Size = 0.018.
Gambar 4.5 (a) adalah simbol awal yang akan diproses. Gambar 4.5 (b)
adalah simbol setelah diganggu oleh noise atau AWGN. Gambar 4.5(c) adalah
gambar setelah diproses didalam ekualizer. Disini terlihat bahwa simbol setelah
diganggu oleh noise akan bertumpuk, namun setelah diekualisasi simbol tersebut
perlahan mulai menyebar kembali membentuk seperti simbol awal, namun belum
begitu terlihat jelas tumpukannya memisah.
-2 -1 0 1 2
-2 -1 0 1 2
Transmitted symbols
Real
Im
age
-2 -1 0 1 2
-2 -1 0 1 2
Received samples
Real
Im
age
-2 -1 0 1 2
-2 -1 0 1 2
Equalized symbols
Real
Im
BAB V
PENUTUP
5.1 Kesimpulan
Dari hasil simulasi yang dilakukan dapat ditarik kesimpulan diantaranya
adalah:
1. Dari hasil simulasi dapat dilihat bahwa baik tidaknya nilai SER dipengaruhi
oleh beberapa hal seperti jumlah step size, panjang filter dan SNR.
2. Untuk hasil SER yang tidak menggunakan ekualizer maka untuk parameter
SNR dan panjang filter menghasilkan nilai SER yang konstan yaitu 1.
3. Semakin besar nilai SNR yang digunakan maka semakin kecil nilai SER.
Untuk SNR mulai dari 15 dB sampai 27 dB besarnya SER 0.8067 sampai
dengan 0.7094.
4. Semakin besar panjang filter yang digunakan maka nilai SER akan semakin
besar pula. Untuk panjang filter mulai dari 20 sampai 41 besarnya SER
0.6856 sampai dengan 0.7171.
5. Semakin besar nilai step size yang digunakan maka nilai SER akan semakin
kecil. Untuk step size mulai dari 0.001 sampai 0.032 besarnya SER 0.8242
sampai dengan 0.6849.
5.2 Saran
Untuk mendapatkan hasil simulasi yang lebih baik, maka diperlukan
penambahan parameter-parameter yang dilibatkan dalam simulasi antara lain :
1. Perlu adanya penambahan variasi modulasi yang digunakan.
2. Penganalisisan dilakukan tidak hanya pada bit-bit sebagai data masukan,
DAFTAR PUSTAKA
[1] Aulia Dewi Winda, Yoedy Moegiharto, “Perancangan MMSE
Equalizer Dengan Modulasi QAM Berbasis Perangkat Lunak”,
Skripsi Jurusan Teknik Telekomunikasi, Institut Teknologi
Surabaya. diakses pada
tanggal 2 September 2012).
[2] Salman. M, 2009, “Analisa Performasi Sistem Diversitas
Alamouti menggunakan Teknik Estimasi Kanal, Skripsi Jurusan
Teknik Elektro, Universitas Sumatera Utara.
[3] Ekoaji, “ Data Communication and Data Transmission”,
[4] Elena Punskaya,
(diakses pada tanggal 2 September 2012) [5] Pedro In´acio H¨ubscher, Jos´e Carlos M. Bermudez, 2006, “A
MeanSquare Stability Analysis of the Least Mean Fourth (LMF)
Adaptive Algorithm (diakses pada tanggal 2 September 2012).
[6] Otaru Musa U, Azzedine Zerguine, Lahouari Cheded, and Asrar
U. H. Sheikh, 1984 “ Adaptive Equalizer Based on a Power of
Two Quantizer LMF Algorithm”.
[7] Hartanto, Sri, 2010, “ Pengurangan Bit Error Pada Modulasi
M-QAM Dalam Kanal Rayleigh Fading, Skripsi pada Jurusan
Teknik Elektro, Universitas Indonesia.
[8] Sumardi, Syahid, 2004, “ Simulasi Penekanan Derau Dengan
LAMPIRAN
Listing program
PROGRAM Tanpa EKUALIZER
% Program Pembangkitan Data Masukan
u=rand(1,3000); % total number of data
T=length(u);
M=2000; % total number of training symbols
dB=25; % SNR in dB value
N=20; % smoothing length N+1
Lh=5; % channel length = Lh+1
P=round((N+Lh)/2); % equalization delay
% Program Pembangkitan Modulasi
s=round(rand(1,T))*2-1; % QPSK or 4 QAM symbol sequence
s=s+sqrt(-1)*(round(rand(1,T))*2-1);
% Pembangkitan digital filter
%x=filter(h,1,s);
% Program Pembangkitan Kanal Rayleigh
h=randn(1,Lh+1)+sqrt(-1)*randn(1,Lh+1); % channel (complex)
h=h/norm(h); % normalize
% Program Pembangkitan AWGN
x=filter(h,1,s);
vn=randn(1,T)+sqrt(-1)*randn(1,T); % AWGN noise (complex)
vn=vn/norm(vn)*10^(-dB/20)*norm(x); % adjust noise power with SNR
dB value
SNR=20*log10(norm(x)/norm(vn)) % Check SNR of the received
samples
x=x+vn; % received signal
Lp=T-N; %% remove several first samples to avoid 0 or negative
subscript
X=zeros(N+1,Lp); % sample vectors (each column is a sample
vector)
for i=1:Lp
X(:,i)=x(i+N:-1:i).'; end
e=zeros(1,M-10); % used to save instant error
w=zeros(N+1,1); % initial condition
mu=0.018; % parameter to adjust convergence and steady
error
end
sb=w'*X; % estimate symbols (perform equalization)
% Program Menghitung SER sampai pembentukan Gambar (Scatter Plot).
sb1=sign(real(sb1))+sqrt(-1)*sign(imag(sb1)); % perform symbol detection
start=7; % carefully find the corresponding begining point
sb2=sb1-s(start+1:start+length(sb1)); % find error symbols
SER=length(find(sb2~=0))/length(sb2) % calculate SER
if 1
subplot(221),
plot(s,'o'); % show the pattern of transmitted symbols
grid,title('Transmitted symbols');
xlabel('Real'),ylabel('Image')
axis([-2 2 -2 2])
subplot(222),
plot(x,'o'); % show the pattern of received samples
grid, title('Received samples'); xlabel('Real'),
ylabel('Image')
subplot(223),
plot(sb,'o'); % show the pattern of the equalized symbols
grid, title('Equalized symbols'), xlabel('Real'),
ylabel('Image')
PROGRAM EKUALIZER LMF-PTQ
% Program Pembangkitan Data Masukan
u=rand(1,3000); % total number of data
T=length(u);
M=2000; % total number of training symbols
dB=25; % SNR in dB value
N=20; % smoothing length N+1
Lh=5; % channel length = Lh+1
P=round((N+Lh)/2); % equalization delay
% Program Pembangkitan Modulasi
s=round(rand(1,T))*2-1; % QPSK or 4 QAM symbol sequence
s=s+sqrt(-1)*(round(rand(1,T))*2-1);
% Pembangkitan digital filter
%x=filter(h,1,s);
% Program Pembangkitan Kanal Rayleigh
h=randn(1,Lh+1)+sqrt(-1)*randn(1,Lh+1); % channel (complex)
h=h/norm(h); % normalize
% Program Pembangkitan AWGN
x=filter(h,1,s);
vn=randn(1,T)+sqrt(-1)*randn(1,T); % AWGN noise (complex)
vn=vn/norm(vn)*10^(-dB/20)*norm(x); % adjust noise power with SNR
dB value
SNR=20*log10(norm(x)/norm(vn)) % Check SNR of the received
samples
x=x+vn; % received signal
% Program Estimasi LMF-PTQ
Lp=T-N; %% remove several first samples to avoid 0 or negative
subscript
X=zeros(N+1,Lp); % sample vectors (each column is a sample
vector)
for i=1:Lp
X(:,i)=x(i+N:-1:i).'; end
e=zeros(1,M-10); % used to save instant error
w=zeros(N+1,1); % initial condition
mu=0.018; % parameter to adjust convergence and steady
error
for i=1:M-10
y(i)= w'*X(:,i+10);
e(i)=s(i+10+N-P)-w'*X(:,i+10); % instant error
mutlak = abs(e(i));
if mutlak >=1 qe3=sign(e(i))
elseif mutlak <0.5 qe3=0
else qe3 = 2*(exp(3*log(abs(e(i)))))*sign(e(i))
end
w=w+2*mu*qe3*sign(s(i+10+N-P)); % update equalizer
estimation
i_e=[i/10000 abs(e(i))] % output information
end
% Program Menghitung SER sampai pembentukan Gambar (Scatter Plot).
sb1=sb/norm(w); % scale the output
sb1=sign(real(sb1))+sqrt(-1)*sign(imag(sb1)); % perform symbol
detection
start=7; % carefully find the corresponding begining point
sb2=sb1-s(start+1:start+length(sb1)); % find error symbols
SER=length(find(sb2~=0))/length(sb2) % calculate SER
if 1
subplot(221),
plot(s,'o'); % show the pattern of transmitted symbols
grid,title('Transmitted symbols');
xlabel('Real'),ylabel('Image')
axis([-2 2 -2 2])
subplot(222),
plot(x,'o'); % show the pattern of received samples
grid, title('Received samples'); xlabel('Real'),
ylabel('Image')
subplot(223),
plot(sb,'o'); % show the pattern of the equalized symbols
grid, title('Equalized symbols'), xlabel('Real'),
ylabel('Image')
Tampilan Hasil Simulasi Keseluruhan
SNR=15 SNR=16
SNR=17
Berdasarkan rentang SNR
SNR=18 SNR=19
SNR=20
SNR=21 SNR=22
SNR=23 -2 -1 0 1 2
-2 -1 0 1 2 Transmitted symbols Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Received samples Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Equalized symbols Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Transmitted symbols Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Received samples Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Equalized symbols Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Transmitted symbols Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Received samples Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Equalized symbols Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Transmitted symbols Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Received samples Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Equalized symbols Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Transmitted symbols Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Received samples Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Equalized symbols Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Transmitted symbols Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Received samples Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Equalized symbols Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Transmitted symbols Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Received samples Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Equalized symbols Real Im age
-2 -1 0 1 2 -2 -1 0 1 2 Transmitted symbols Real Im age
-2 -1 0 1 2 -2 -1