SISTEM KESETIMBANGAN GAYA
Nur’arizkah, Rika Mansyur, Rezky amalia, Muhammad Fathur rahmat
PENDIDIKAN FISIKA 2014
Abstrak
Telah dilakukan praktikum dengan judul sistem kesetimbangan gaya, yang bertujuan untuk menyelidiki kondisi-kondisi kesetimbangan statis pada sistem tuas dua lengan dan untuk menentukan momen gaya sistem tuas dua lengan berdasarkan prinsip kesetimbangan. Pada praktikum ini diketahui bahwa suatu sistem diakatakan mecapai kesetimbangan statis jika
⃗
Fnet= 0 dan ⃗τnet= 0 atau dengan kata lain sistem tersebut harus dalam kesetimbangan translasi dan rotasinya. Momen gaya didapat dengan persamaan τ=w ×l , dimana R adalah panjang lengan gaya, dan F adalah gaya yang bekerja pada masing-masing beban. hasil pengukuran pada kegiatan 1 oleh beban w1, w2, dan Neraca pegas 1,5 N untuk
∑
τ secaraberurutan dari kegiatan pertama hingga lima yakni
2,25 ×10-2 Nm , 2,4 ×10- 2 Nm , 1,2 × 10-2 Nm , 1,75 × 10-2 Nm , dan
1,8 × 10-2 Nm . Namun, hasil pengukuran ini menyebabkan hukum kesetimbangan yang menyatakan bahwa
∑
τ= 0 tidak terbukti.RUMUSAN MASALAH
1. Bagaimana kondisi-kondisi keseimbangan statis pada sistem tuas dua lengan?
2. Bagaimana cara menentukan momen gaya sistem dua tuas dua lengan berdasarkan prinsip kesetimbangan?
TUJUAN
1. Menyelidiki kondisi-kondisi keseimbangan statis pada sistem tuas dua lengan.
2. Menentukan momen gaya sistem dua tuas dua lengan berdasarkan prinsip kesetimbangan.
METODOLOGI EKSPERIMEN
Ada dua kondisi yang harus dipenuhi oleh sebuah benda untuk dapat mencapai keseimbangan statis.
Pertama benda tersebut harus dalam keadaan kesetimbangan translasi yang berarti bahwa vektor resultan dari semua gaya yang bekerja pada benda harus sama dengan nol. Gerak translasi suatu benda diatur oleh hukum kedua Newton dalam bentuk momentum linear, ditentukan oleh persamaan :
⃗
Fnet=⃗dP dt
Jika dalam keadaan kesetimbangan translasi yakni jika ⃗P suatu konstanta maka ⃗dP /dt = 0 dan kita akan mendapatkan : ⃗Fnet= 0
(kesetimbangan gaya)
Kondisi yang lain adalah harus dalam keadaan kesetimbangan rotasinya. Gerakan rotasi benda diatur oleh hukum kedua Newton dalam bentuk momentum angular, ditentukan oleh persamaan:
⃗
τnet=⃗d L dt
Jika benda dalam kesetimbangan rotasi yakni, jika ⃗L suatu konstanta,
maka ⃗dL /dt = 0 dan kita akan mendapatkan : ⃗τnet= 0 (kesetimbangan Torque)
Jarak tegak lurus dari pusat putaran terhadap garis gaya aksi disebut
lengan gaya. Torka τ merupakan besaran vektor yang didefinisikan :
τ=R× F
w2 adalah berat beban gantung. Berat batang wB adalah tarikan gravitasi yang bekerja pada pusat gravitasi C.
C B
w2 L3 w1
wB
L2 L1
Kondisi untuk kesetimbangan rotasi untuk sistem di atas adalah :
w1(L1) = w2(L2) + wB(L3)
Alat dan Bahan
1. Alat
a. Dasar statif 1 buah
b. Kaki statif 1 buah
c. Batang statif panjang 1 buah
d. Batang statif pendek 1 buah
e. Neraca pegas 1,5 N 1 buah
f. Steker poros 1 buah
g. Tuas 1 buah
h. Mistar 1 buah
2. Bahan
a. Beban 50 gram 3 buah
Identifikasi Variabel
Kegiatan 1
2. Berat beban 3. Torka
Definisi Operasional Variabel
Kegiatan 1
1. Panjang lengan gaya adalah ukuran panjang yang diukur dari titik pusat kesetimbangan menuju ke titik beban berada pada steker poros, yang dikur dengan mistar dengan satuan sentimeter (cm).
2. Berat beban adalah ukuran gaya pada massa/beban yang digunakan, yang diukur dengan menggunakan neraca pegas dengan satuan Newton (N). 3. Torka adalah besar gaya yang menyebabkan sistem mengalami
kesetimbangan, diperoleh dengan mengalikan panjang lengan gaya dengan gaya yang bekerja dimasing-masing bagian ujung titik pusat dan memiliki satuan Newton sentimeter (Ncm).
Prosedur Kerja
Menyusun alat-alat yang sudah diambil seperti pada gambar dibawah
Keterangan:
1. Menyatukan dasar statif, kaki statif, batang statif panjang, dan batang statif pendek seperti pada gambar di atas.
2. Memasang tuas pada steker poros dan mengatur keseimbangannya agar anak panah tepat menunjuk vertikal ke bawah.
Kegiatan Laboratorium
1. Mengukur beban m1(50 gram) dan beban m2 (dua beban 50 gram) dengan menggunakan neraca pegas 1,5 N. mencatat hasilnya pada laporan sementara.
2. Memasang beban m1 pada posisi 4 (6 cm dari pusat tuas) dan beban m2 pada posisi 10 (15 cm dari pusat tuas) disebelah kiri titik pusat tuas (seperti gambar berikut). Mencatat panjang m2 sebagai panjang Lf.
L2
Lf
L1
Fpegas w1 w2
3. Menarik neraca pegas hingga terjadi kesetimbangan dan membaca besarnya gaya (F) pada neraca pegas tersebut.
HASIL EKSPERIMEN DAN ANALISIS DATA
Hasi pengamatan
w1 = 50 gram = 0,5 N
w2 = 100 gram = 1 N
NST Neraca Pegas 1,5 N = 0,1 N
[image:6.595.117.514.309.550.2]NST Mistar = 0,1 cm
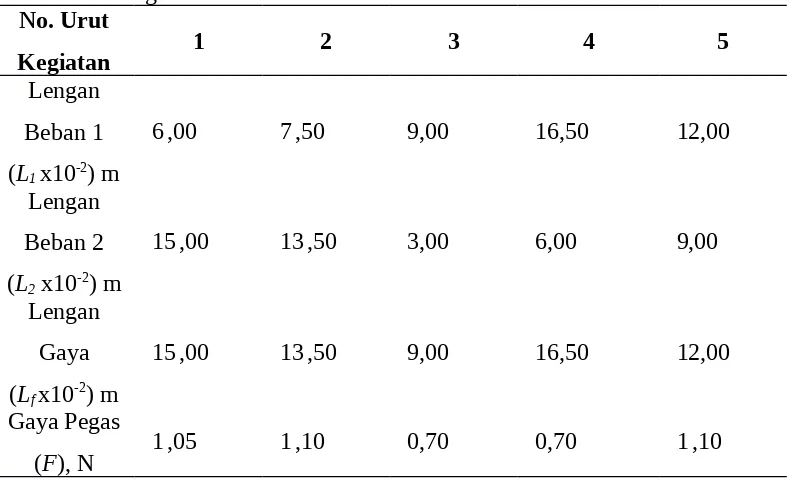
Tabel Hasil Pengamatan
No. Urut
Kegiatan 1 2 3 4 5
Lengan Beban 1 (L1 x10-2) m
6 ,00 7 ,50 9,00 16,50 12,00
Lengan Beban 2 (L2x10-2) m
15 ,00 13 ,50 3,00 6,00 9,00
Lengan Gaya (Lf x10-2) m
15 ,00 13 ,50 9,00 16,50 12,00
Gaya Pegas
ANALISIS DATA
A. Momen gaya (torka) oleh beban w1 = 0,5 N
1. τ1.1= w1 × l1 = 0,5 N × 6,0 × 102 m = 3 × 10-2 Nm
2. τ1.2= w1 × l1 = 0,5 N × 7,5 × 10 2
m = 3,75 × 10-2 Nm
3. τ1.3= w1 × l1 = 0,5 N × 9,0 × 102 m = 4,5 × 10- 2 Nm
4. τ1.4= w1 × l1 = 0,5 N × 16,5 × 10 2
m = 8,25 × 10-2 Nm
5. τ1.5= w1 × l1 = 0,5 N × 12,0 × 102 m = 6,0 × 10- 2 Nm
Momen gaya (torka) oleh beban w2 = 1 N
1. τ2.1= w2 × l2 = 1 N × 15 × 10 - 2
m = 15 × 10-2 Nm
2. τ2.2= w2 × l2 = 1 N × 13,5 × 10- 2 m = 13,5 × 10-2 Nm
3. τ2.3= w2 × l2 = 1 N × 3 × 10 -2
m = 3 × 10-2 Nm
4. τ2.4= w2 × l2 = 1 N × 6 × 10-2 m = 6 × 10- 2 Nm
5. τ2.5= w2 × l2 = 1 N × 9 × 10-2 m = 9 × 10-2 Nm Momen gaya (torka) oleh Fpegas
1. τf.1= Ff × lf = 1,05 N × 15,00 × 10-2 m = 15,75 × 10- 2 Nm
2. τf.2= Ff × lf = 1,1 N × 13,5 × 10- 2 m = 14,85 × 10-2 Nm 3. τf.3= Ff × lf = 0,7 N × 9,0 × 10
- 2
m = 6,3 × 10-2 Nm
5. τf.5= Ff × lf = 1,1 N × 12,0 × 102 m = 13,2 × 10-2 Nm
B. Torka total masing-masing kegiatan
1.
∑
τ1= τ1.1 + τ2.1 - τf.1 = (3,00 + 15,00 - 15,75)10 - 2Nm = 2,25 × 10-2 Nm
2.
∑
τ2= τ1.2 + τ2.2 - τf.2 = (3,75 + 13,50 - 14,85)10- 2 Nm = 2,4 × 10-2 Nm3.
∑
τ3= τ1.3 + τ2.3 - τf.3 = (4,5 + 3,0 - 6,3)10- 2 Nm = 1,2 × 10-2 Nm 4.∑
τ4= τ1.4 + τ2. 4 - τf.4 = (8,25 + 6,00 - 11,50)10 -2Nm = 2,4 × 10-2 Nm
5.
∑
τ5= τ1.5 + τ2.5 - τf.5 = (6,0 + 9,0 - 13,2)10-2 Nm = 1,8 × 10-2 NmC. Kesalahan Relatif (KR) dan Pelaporan Fisika Hasil Pengukuran
τ = w × l
dτ =
|
∂τ∂w
|
dw+|
∂τ ∂l|
dldτ =
|
∂(w × l) ∂w|
dw+|
∂(w × l)
∂l
|
dldτ =| ldw + wdl|
dτ =| l∆w + w∆l|
∆τ τ =
|
l × ∆w w × l
|
+|
w × ∆l w × l
|
∆τ =
|
∆w w +∆l l
|
τ∆w = 1
n × NST Neraca pegas 1,5 N
∆w = 1
2 × 0,1 N = 0,05 N Dan
∆l = 1
n × NST Mistar
∆l = 1
2 × 0,1 = 0,05 cm = 0,05 × 10 -2m
1. Untuk ∆τ1.1 sampai ∆τ1.5
a. Untuk ∆τ1.1
∆τ1.1=
|
∆w w1 +∆l l1.1
|
× 10- 2Nm × τ 1.1
∆τ1.1=
|
0,05 0,5 +0,05 × 10-2
6 × 10-2
|
Nm × τ1.1 ∆τ1.1=|
0,1 + 0,0083|
Nm × τ1.1∆τ1.1=
(
0,1083 × 3 × 10 - 2)
Nm = 0,3249 × 10-2 Nm
Sehingga:
KR =∆τ1.1 τ1.1
×100 %=0,3249 × 10 -2
3 × 10-2 ×100% =10,8% = 2 angka berarti
Maka pelaporan fisika hasil pengukuran adalah : PF =
|
τ1.1 ± ∆τ1.1|
Nm =|3 ± 0,33|10-2 Nm
b. Untuk ∆τ1.2
∆τ1.2=
|
∆w w1 +∆l l1.2
|
τ1.2 ∆τ1.2=|
0,050,5 +
0,05 × 10-2
∆τ1.2=
|
0,1 + 0,0067|
Nm × τ1.2 ∆τ1.2=(
0,1067 × 3,75 × 10- 2
)
Nm = 0,400 × 10-2 Nm Sehingga:
KR =∆τ1.2 τ1.2
×100 %=0,400 × 10 -2
3,75 × 10-2 ×100% =10,7% = 2 angka berarti Maka pelaporan fisika hasil pengukuran adalah :
PF =
|
τ1.2 ± ∆τ1.2|
Nm =|3,8 ± 0,4|10-2 Nmc. Untuk ∆τ1.3
∆τ1.3=
|
∆w w1 +∆l l1.3
|
τ1.3 ∆τ1.3=|
0,050,5 +
0,05 × 10-2
9,00 × 10-2
|
Nm × τ1.3 ∆τ1.3= |0,1 + 0,0056 | Nm × τ1.3 ∆τ1.3=(
0,1056 × 4,5 × 10-2
)
Nm = 0,475 × 10- 2 Nm Sehingga:
KR =∆τ1.3 τ1.3
×100 %=0,475 × 10
-2
4,5 × 10- 2 ×100 % =10,6% = 2 angka berarti Maka pelaporan fisika hasil pengukuran adalah :
PF =
|
τ1.3 ± ∆τ1.3|
Nm =|4,5 ± 0, 5|10 -2Nm
d. Untuk ∆τ1.4
∆τ1.4=
|
∆w w1 +∆l l1.4
|
τ1.4 ∆τ1.4=|
0,050,5 +
0,05 × 10- 2
16,50 × 10-2
|
Nm × τ1.4 ∆τ1.4=|
0,1 + 0,0030|
Nm × τ1.4∆τ1.4=
(
0,1030 × 8,25 × 10-2)
Nm = 0,849 × 10- 2 Nm Sehingga:KR =∆τ1.4 τ1.4
×100 %=0,849 × 10 - 2
8,25 × 10- 2 ×100 % =10,3% = 2 angka berarti Maka pelaporan fisika hasil pengukuran adalah :
PF =
|
τ1.4 ± ∆τ1.4|
Nm =|8,3 ± 0,8|10 - 2Nm
∆τ1.5=
|
∆w w1+ ∆l l1.5
|
τ1.5
∆τ1.5=
|
0,05 0,5 +0,05 × 10-2
12,0 × 10-2
|
Nm × τ1.5 ∆τ1.5= |0,1 + 0,0042 | Nm × τ1.4 ∆τ1.5=(
0,1042 × 6,0 × 10-2
)
Nm = 0,625 × 10- 2 Nm Sehingga:
KR =∆τ1.5 τ1.5
×100 %=0,625 × 10
-2
6,0 × 10-2 ×100 % =10,4% = 2 angka berarti
Maka pelaporan fisika hasil pengukuran adalah : PF =
|
τ1.5 ± ∆τ1.5|
Nm =|6,0 ± 0,6|10-2 Nm 2. Untuk ∆τ2.1 sampai ∆τ2.5a. Untuk ∆τ2.1 ∆τ2.1=
|
∆ww2 + ∆l l2.1
|
τ2.1 ∆τ2.1=|
0,051 +
0,05× 10-2
15× 10-2
|
Nm × τ2.1 ∆τ2.1=|
0,05 + 0,0033|
Nm × τ2.1∆τ2.1=
(
0,0533 × 15 × 10- 2)
Nm = 0,799 × 10-2 Nm Sehingga:KR =∆τ2.1 τ2.1
×100 %=0,799 × 10 - 2
15,0 × 10-2 ×100 % = 5,3% = 3 angka berarti Maka pelaporan fisika hasil pengukuran adalah :
PF =
|
τ2.1 ± ∆τ2.1|
Nm =|15,0 ± 0,8|10 - 2Nm b. Untuk ∆τ2.2
∆τ2.2=
|
∆w w2 +∆l l2.2
|
τ2.2 ∆τ2.2=|
0,051 +
0,05× 10-2
13,5× 10-2
|
Nm × τ2.2 ∆τ2.2=|0,05 + 0,0037 |Nm × τ2.2∆τ2.2=
(
0,0537 × 13,5 × 10- 2)
Nm = 0,723 × 10-2 Nm Sehingga:KR =∆τ2.2
τ2.2
×100 %=0,723 × 10- 2
13,5 × 10-2 ×100 % = 5,3% = 3 angka berarti Maka pelaporan fisika hasil pengukuran adalah :
PF =
|
τ2.2 ± ∆τ2.2|
Nm =|13,5 ± 0,7|10 - 2Nm c. Untuk ∆τ2.3
∆τ2.3=
|
∆ww 2∆τ2.3=
|
0,05 1 +0,05× 10- 2
3,0 × 10-2
|
Nm × τ2.3 ∆τ2.3=|0,05 + 0,0167 |Nm × τ2.3∆τ2.3=
(
0,0667 × 3,0 × 10- 2)
Nm = 0,200 × 10-2 Nm Sehingga:KR =∆τ2.3
τ2.3
×100 %=0,200 × 10-2
3,0 × 10-2 ×100 % = 7% = 2 angka berarti
Maka pelaporan fisika hasil pengukuran adalah : PF =
|
τ2.3 ± ∆τ2.3|
Nm =|3,0 ± 0,2|10- 2 Nm d. Untuk ∆τ2.4∆τ2.4=
|
∆w w2+ ∆l l2.4
|
τ2.4
∆τ2.4=
|
0,05 1 +0,05× 10-2
6,0 × 10- 2
|
Nm × τ2.4 ∆τ2.4=|
0,05 + 0,0083|
Nm × τ2.4 ∆τ2.4=(
0,0583 × 6,0 × 10-2
)
Nm = 0,349 × 10-2 Nm Sehingga:
KR =∆τ2.4 τ2.4
×100 %=0,349 × 10 -2
6,0 × 10- 2 ×100 % = 6% = 2 angka berarti Maka pelaporan fisika hasil pengukuran adalah :
PF =
|
τ2.4 ± ∆τ2.4|
Nm =|6,0 ± 0,4|10-2 Nm e. Untuk ∆τ2.5∆τ2.5=
|
∆w w2 +∆l l2.5
|
τ2.5 ∆τ2.5=|
0,051 +
0,05× 10- 2
9,0 × 10- 2
|
Nm × τ2.5 ∆τ2.5=|0,05 + 0,0056 |Nm × τ2.5 ∆τ2.5=(
0,0556 × 9,0 × 10- 2
)
Nm = 0,500 × 10-2 Nm Sehingga:
KR =∆τ2.5 τ2.5
×100 %=0,500 × 10
-2
9,0 × 10-2 ×100 % = 5,6% = 2 angka berarti Maka pelaporan fisika hasil pengukuran adalah :
PF =
|
τ2.5 ± ∆τ2.5|
Nm =|9,0 ± 0, 5|10-2 Nm 3. Untuk ∆τf.1 sampai ∆τf.5a. Untuk ∆τf.1 ∆τf.1=
|
∆Ff∆τf.1=
|
0,05 1,05 +0,05 × 10-2
15 × 10- 2
|
Nm × τf.1 ∆τf.1=|0,048 + 0,0033 |Nm × τf.1∆τf.1=
(
0,0513 × 15,75 × 10-2)
Nm = 0,81 × 10- 2 Nm Sehingga:KR =∆τf.1
τf.1
×100 %=0,81 × 10-2
15,75 × 10- 2×100 % = 5,1% = 3 angka berarti
Maka pelaporan fisika hasil pengukuran adalah : PF =
|
τf.1 ± ∆τf.1|
Nm =|15,8 ± 0,8|10- 2 Nm b. Untuk ∆τf.2∆τf.2=
|
∆Ff Ff.2 +∆lf lf.2
|
τf.2 ∆τf.2=|
0,05 1,10 +
0,05 × 10-2
13,5 × 10- 2
|
Nm × τf.2 ∆τf.2=|0,0455 + 0,0037 |Nm × τf.2∆τf.2=
(
0,0492 × 14,85 × 10-2)
Nm = 0,73 × 10- 2 Nm Sehingga:KR =∆τf.2
τf.2
×100 %=0,73 × 10
-2
14,85 × 10- 2×100 % = 5% = 3 angka berarti
Maka pelaporan fisika hasil pengukuran adalah : PF =
|
τf.2 ± ∆τf.2|
Nm =|14,9 ± 0,7|10- 2 Nm c. Untuk ∆τf.3∆τf.3=
|
∆Ff Ff.3 +
∆lf lf.3
|
τf.3 ∆τf.3=|
0,050,7 +
0,05 × 10-2
9,0 × 10-2
|
Nm × τf.3 ∆τf.3=|0,071 + 0,0056 |Nm × τf.3 ∆τf.3=(
0,0766 × 6,3 × 10-2
)
Nm = 0,482 × 10- 2 Nm Sehingga:
KR =∆τf.3 τf.3
×100 %=0,482 × 10
-2
6,3 × 10- 2 ×100 % = 7,6% = 2 angka berarti
Maka pelaporan fisika hasil pengukuran adalah : PF =
|
τf.3 ± ∆τf.3|
Nm =|6,3 ± 0,5|10- 2 Nm d. Untuk ∆τf.4∆τf.4=
|
∆FfFf.4
+ ∆lf
lf.4
|
τf.4
∆τf.4=
|
0,05 0,7 +0,05 × 10-2
∆τf.4=
|
0,071 + 0,0030|
Nm × τf.4 ∆τf.4=(
0,074 × 11,5 × 10-2
)
Nm = 0,851 × 10-2 Nm Sehingga:
KR =∆τf.4 τf.4
×100 %=0,851 × 10 - 2
11,5 × 10-2 ×100 % = 7,4% = 2 angka berarti Maka pelaporan fisika hasil pengukuran adalah :
PF =
|
τf.4 ± ∆τf.4|
Nm =|12 ± 1|10-2 Nm e. Untuk ∆τf.5∆τf.5=
|
∆Ff Ff.5 +∆lf lf.5
|
τf.5 ∆τf.5=|
0,051,1 +
0,05 × 10-2
12 × 10- 2
|
Nm × τf.5 ∆τf.5=|
0,0455 + 0,0042|
Nm × τf.5 ∆τf.5=(
0,0497 × 13,2 × 10-2
)
Nm = 0,656 × 10-2 Nm Sehingga:
KR =∆τf.5 τf.5
×100 %=0,656 × 10 -2
13,2 × 10-2 ×100 % = 5% = 3 angka berarti Maka pelaporan fisika hasil pengukuran adalah :
PEMBAHASAN
Praktikum ini bertujuan agar kita bisa memahami dan menjelaskan tentang kondisi-kondisi kesetimbangan gaya dan momen gaya sistem tuas dua lengan
berdasarkan prinsip kesetimbangan. Pada praktikum ini digunakan dua beban w1
dan w2 yang masing-masing beratnya 0,5 N dan 1 N, dan diseimbangkan oleh
neraca pegas 1,5 N pada sisi lain dari titik pusat. Pada kegiatan pertama oleh
beban w1, masing-masing beban dimasukkan 6 cm, dan 15 cm di sebelah kiri dari
titik pusat. Sehingga hasil pembacaan dari neraca pegas yang ditarik sebagai penyeimbang di sebelah kanan titik pusat adalah 1,05 N dengan jarak yang sama
dengan beban w2, urutan jarak peletakan beban dan neraca pegas pada kegiatan
selanjutnya telah dicantumkan pada tabel hasil pengamatan dengan metode praktikum yang sama dengan kegiatan pertama diatas. Adapun hasil perhitungan
torsi oleh beban w1 , dan penulisan fisika hasil pengukuran berdasarkan kesalahan
relativenya yakni 3 ×10-2 Nm dan
PF =
|
τ1.1 ± ∆τ1.1|
Nm =|3 ± 0, 33|10 -2Nm , yang menggunakan 2 angka
berarti. Untuk kegiatan pertama hingga kelima oleh beban w1 mengikuti cara
perhitungan yang sama dengan kegiatan pertama oleh beban w1 yang telah
disebutkan diatas.
Pada kegiatan pertama oleh beban w2, beban dimasukkan ke steker poros
dengan jaraknya 15 cm dari titik pusat, hasil perhitungan torsi yang di dapat
yaknni 15 ×10-2 Nm dengan kesalahan relative 5,3 % yang berarti
menggunakan 3 angka berarti, sehingga penulisan fisika pada tahap kegiatan ini
adalah PF =
|
τ2.1 ± ∆τ2.1|
Nm =|15,0 ± 0,8|10 - 2Nm . Adapun hasil perhitungan torsi untuk neraca pegas 1,5 N pada kegiatan pertama yakni
15,75 ×10-2 Nm sehingga hasil penulisan fisika untuk kegiatan ini: PF =
|
τf.1 ± ∆τf.1|
Nm =|15,8 ± 0,8|10- 2
Nm , atau dengan kesalahan relative 5,1 % yakni dengan 3 angka berarti.
τ=R× F , dimana F adalah nilai gaya yang bekerja pada beban w1, w2, dan hasil pembacaan neraca pegas 1,5 N pada praktikum ini, dan R adalah jarak atau panjang lengan beban dimana beban diletakkan pada praktikum ini. Pada perhitungan kesalahan relative untuk mendapatkan nilai ∆τ , menggunakan rambat ralat sehingga akan diperoleh persamaan dibawah ini.
τ =
|
∆w w +∆l
l
|
τ , maka : KR = ∆ττ ×100 %= Jumlah angka berarti
Untuk ∆w digunakan kesalahan mutlak alat ukur yang digunakan yakni neraca pegas 1,5 N dengan NST = 0,1 N dan ∆l adalah kesalahan mutlak alat ukur mistar dengan NST 0,1 cm. Selanjutnya persamaan
PF =|τ ± ∆τ|Nm digunakan dalam penulisan fisika dari hasil pengukuran pada masing-masing kegiatan. Dalam pembuktian hukum kesetimbangan diperoleh
∑
τ dari kegiatan pertama hingga lima yakni2,25 ×10-2 Nm , 2,4 ×10- 2 Nm , 1,2 × 10-2 Nm , 1,75 × 10-2 Nm , dan 1,8 × 10-2 Nm .
KESIMPULAN DAN DISKUSI
DAFTAR RUJUKAN
Halliday, David dan Robert Resnick. 1999. Fisika Dasar Edisi 7 Jilid 1 (terjemahan). Jakarta: Erlangga.
Jewet dan Serway. 2009. Fisika untuk Sains dan Teknik Edisi 6 (Terjemahan).
Jakarta: Salemba Teknik.