Perancangan Robot Line Follower Menggunakan Onmiwheel Berbasis Mikrokontroler BS2P40
Teks penuh
Gambar

Dokumen terkait
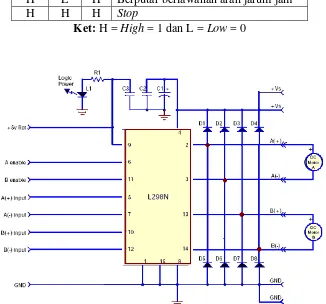
volt, maka kedua transistor tipe NPN C945 yang disebelah kanan tidak akan aktip.
Sedangkan jika nilai yang dibaca sensor ultrasonik kanan dan kiri lebih besar dari 30 maka kursi bergerak maju dengan kecepatan putar motor DC adalah 50% dari kecepatan
Dibutuhkan sebuah sistem kendali untuk mengatur keseimbangan robot line follower, sehingga dapat bergerak dengan stabil dan mampu mengatasi gangguan yang diberikan
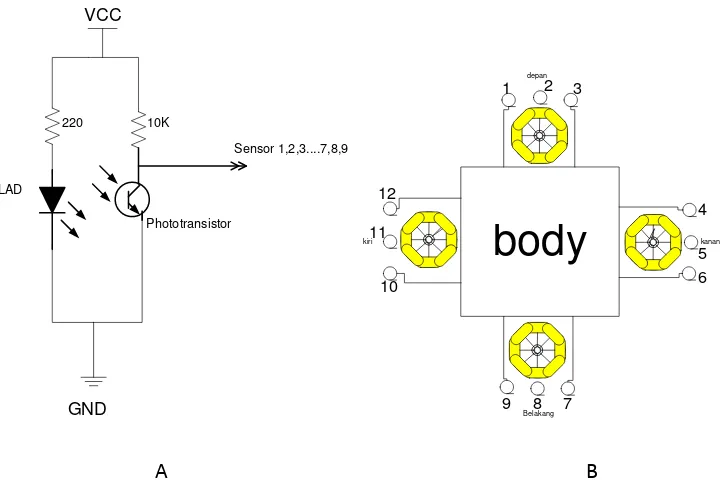
Pada penelitian ini, robot line follower menggunakan sensor proximity yang dapat mendeteksi ada atau tidak adanya suatu garis, dimana garis ini merupakan
Namun untuk penerapan sensor accelerometer dan gyroscope sebagai pembaca jarak perpindahan robot masih kurang ideal dengan nilai error yang terus meningkat selama pembacaan
Sedangkan jika nilai yang dibaca sensor ultrasonik kanan dan kiri lebih besar dari 30 maka kursi bergerak maju dengan kecepatan putar motor DC adalah 50% dari kecepatan
Pembacaan jarak yang salah oleh sensor ping selama proses pergerakan robot mengunakan jaringan syaraf tiruan dapat dilakukan dengan cara: pembacaan jarak yang dilakukan
Pada penelitian ini robot line follower dengan metode proportional integral derivatif (PID) adalah sebuah robot yang dapat mengikuti garis yang didukung oleh
