KOMBINASI ALGORITMA JARINGAN SYARAF TIRUAN
LEARNING VECTOR QUANTIZATION (LVQ) DAN SELF
ORGANIZING KOHONEN PADA KECEPATAN
PENGENALAN POLA TANDA TANGAN
TESIS
EMNITA BR GINTING
117038071
PROGRAM STUDI S2 TEKNIK INFORMATIKA
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI
UNIVERSITAS SUMATERA UTARA
MEDAN
KOMBINASI ALGORITMA JARINGAN SYARAF TIRUAN
LEARNING VECTOR QUANTIZATION (LVQ) DAN SELF
ORGANIZING KOHONEN PADA KECEPATAN
PENGENALAN POLA TANDA TANGAN
TESIS
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh
ijazah Magister Teknik Informatika
EMNITA BR GINTING
117038071
PROGRAM STUDI S2 TEKNIK INFORMATIKA
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI
UNIVERSITAS SUMATERA UTARA
MEDAN
PERSETUJUAN
JUDUL : KOMBINASI ALGORITMA JARINGAN
SYARAF TIRUAN LEARNING VECTOR QUANTIZATION (LVQ) DAN SELF ORGANIZING KOHONEN PADA KECEPATAN PENGENALAN POLA TANDA TANGAN
NAMA : EMNITA BR GINTING
NOMOR INDUK MAHASISWA : 117038071
PROGRAM STUDI : MAGISTER TEKNIK INFORMATIKA
FAKULTAS : ILMU KOMPUTER DAN TEKNOLOGI INFORMASI
UNIVERSITAS SUMATERA UTARA Komisi Pembimbing :
Pembimbing 2 Pembimbing 1
Dr. Zakarias Situmorang Prof. Dr. Muhammad Zarlis
Diketahui/disetujui oleh Ketua Program Studi,
PERNYATAAN
KOMBINASI ALGORITMA JARINGAN SYARAF TIRUAN LEARNING
VECTOR QUANTIZATION (LVQ) DAN SELF ORGANIZING KOHONEN PADA
KECEPATAN PENGENALAN POLA TANDA TANGAN
TESIS
Saya mengakui bahwa tesis ini adalah hasil karya saya sendiri, kecuali beberapa
kutipan dan ringkasan yang masing-masing telah disebutkan sumbernya.
Medan, Oktober 2013
Emnita br Ginting
PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN
AKADEMIS
Sebagai sivitas akademika Universitas Sumatera Utara, saya yang bertanda tangan
dibawah ini:
Nama : Emnita br Ginting
NIM : 117038071
Program Studi : Teknik Informatika
Demi pengembangan ilmu pengetahuan, menyetujui untuk memberikan kepada
Universitas Sumatera Utara Hak Bebas Royalti Non-Eksklusif (Non-Exclusive Royalty
Free Right) atas tesis saya yang berjudul:
KOMBINASI ALGORITMA JARINGAN SYARAF TIRUAN LEARNING VECTOR QUANTIZATION (LVQ) DAN SELF ORGANIZING KOHONEN PADA
KECEPATAN PENGENALAN POLA TANDA TANGAN
Beserta perangkat yang ada (jika diperlukan). Dengan Hak Bebas Royalti
Non-Eksklusif ini, Universitas Sumatera Utara berhak menyimpan, mengalih media,
memformat, mengelola dalam bentuk database, merawat dan mempublikasikan tesis
saya tanpa meminta izin dari saya selama tetap mencantumkan nama saya sebagai
penulis dan sebagai pemegang dan/ atau sebagai pemilik hak cipta.
Demikian pernyataan ini dibuat dengan sebenarnya.
Medan, Oktober 2013
Emnita br Ginting
Telah diuji pada
Tanggal: Oktober 2013
PANITIA PENGUJI TESIS
Ketua : Prof.Dr.Muhammad Zarlis
Anggota : 1. Dr.Zakarias Situmorang
2. Prof.Dr.Herman Mawengkang
3. Prof.Dr.Tulus
RIWAYAT HIDUP
DATA PRIBADI
Nama Lengkap : Emnita br Ginting, S.Kom.
Tempat dan Tanggal Lahir : Juhar, 09 Februari 1987
Alamat Rumah : Jl. Setia Budi No. 285 A Tanjung Sari
Telepon/ Faks/ HP : (061) 8211129/ -/ 081375356664
E-mail : [email protected]
Instansi Tempat Bekerja : -
Alamat Kantor : -
DATA PENDIDIKAN
SD : SDN No: 043944 Juhar TAMAT: 1999
SLTP : SLTP Negeri 1 Juhar TAMAT: 2002
SLTA : SMA Swasta Santo Thomas 1 Medan TAMAT: 2005
S1 : Ilmu Komputer Universitas Sumatera Utara TAMAT: 2010
KATA PENGANTAR
Puji syukur penulis panjatkan kehadirat Tuhan Yang Maha Esa atas berkat, rahmat
dan karunianya berupa pengetahuan, kesehatan dan kesempatan yang diberikan
kepada penulis sehingga dapat menyelesaikan tesis dengan judul “KOMBINASI ALGORITMA JARINGAN SYARAF TIRUAN LEARNING VECTOR
QUANTIZATION (LVQ) DAN SELF ORGANIZING KOHONEN PADA
KECEPATAN PENGENALAN POLA TANDA TANGAN”.
Penulis dalam penyusunan untuk menyelesaikan tesis ini banyak mendapati
kesulitan dan kendala–kendala yang dihadapi, namun berkat bantuan, dorongan,
nasehat dari berbagai pihak terutama dari dosen pembimbing serta dari para dosen,
maka tugas tesis ini dapat diselesaikan dengan baik. Terutama tidak lepas dari
dorongan orang tua, kakak, adik yang juga telah banyak memberikan bantuan dan
dorongan hingga penulis dapat sampai pada TESIS ini.
Untuk itu penulis ingin menyampaiakan ucapan terimakasih yang sebesar–
besarnya kepada :
1. Kedua Orangtua saya Ayahanda Sebastianus Derom Ginting dan Ibunda
Sulaweti br Tarigan tercinta yang telah memberikan kasih sayangnya, doa
yang tak pernah putus serta dorongan moril maupun materil kepada saya
sehingga dapat menyelesaikan tesis ini dengan baik.
2. Bapak Prof. Dr. Muhammad Zarlis, selaku Ketua Program Studi
Pascasarjana Teknik Informatika Fakultas Ilmu Komputer dan Teknologi
Informasi Sumatera Utara Medan sekaligus Pembimbing I yang telah
bersedia memberikan bimbingan serta pengarahan hingga selsesainya
penulisan tesis ini.
3. Bapak Dr. Zakarias Situmorang selaku Dosen Pembimbing II yang telah
bersedia memberikan bimbingan serta pengarahan hingga selesainya
penulisan tesis ini.
4. Bapak Dosen Penguji yang telah memberikan saran untuk perbaikan dan
5. Bapak dan Ibu Dosen yang telah memberikan materi perkuliahan dan ilmu
pengetahuan selama penulis menyelesaikan Program Studi Pascasarjana
Teknik Informatika.
6. Segenap sivitas akademika Program Studi Pascasarjana Teknik
Informatika Sumatera Utara.
7. Teman – teman seperjuangan Angkatan 2011 Kom-C yang telah
memberikan dukungan dalam penyelesaian tesis ini.
8. Kakak saya Raskarina Ginting dan Rehlitna Ginting, adik saya Ingan
Pulungta Ginting, serta sepupu saya Nopita Tarigan yang telah banyak
memberikan dorongan dan bantuan kepada saya sehingga dapat
menyelesaikan tesis ini dengan baik.
Penulis menyadari bahwa masih ada kekurangan dalam penulisan tesis ini, untuk
itu, penulis mengharapkan kritik dan saran dari pembaca demi kesempurnaan
penelitian selanjutnya.
Akhir kata penulis berharap semoga karya ilmiah ini dapat bermanfaat bagi semua
pihak, khususnya dalam bidang pendidikan.
Medan, Oktober 2013
Penulis
Emnita br Ginting
ABSTRAK
Tanda tangan adalah sebuah bentuk khusus dari tulisan tangan yang mengandung karakter khusus dan bentuk-bentuk tambahan yang sering digunakan sebagai bukti verifikasi identitas seseorang. Sebagian tanda tangan dapat dibaca, namun banyak pula tanda tangan yang tidak dapat dibaca. Kendati demikian, sebuah tanda tangan dapat ditangani sebagai sebuah citra sehingga dapat dikenali dengan menggunakan aplikasi pengenalan pola pada pengolahan citra. Karena tanda tangan merupakan mekanisme primer untuk authentication dan authorization dalam transaksi legal, maka kebutuhan akan penelitian pada pengembangan aplikasi pengenalan dan verifikasi tanda tangan secara otomatis dan efisien meningkat dari tahun ke tahun. Metode yang banyak digunakan dalam pengenalan tanda tangan adalah metode jaringan syaraf tiruan. Pada jaringan syaraf tiruan terdapat proses pembelajaran serta pengenalan. Salah satu algoritma jaringan syaraf tiruan adalah Learning Vector Quantization (LVQ) dan Self Organizing Kohonen. Proses-proses yang terjadi pada metode jaringan syaraf tiruan memerlukan waktu yang relatif lama. Hal ini dipengaruhi banyaknya sampel data yang digunakan sebagai alat update bobot yang dilatih. Semakin banyak dan besar ukuran dari pola yang dilatih, semakin lama pula waktu yang dibutuhkan jaringan. LVQ adalah suatu metode pelatihan pada lapisan kompetitif terawasi yang akan belajar secara otomatis untuk mengklasifikasikan vektor-vektor input kedalam kelas-kelas tertentu. Kelas-kelas-kelas yang dihasilkan tergantung pada jarak antara vektor-vektor input. Jika ada 2 vektor input yang hampir sama maka lapisan kompetitif akan mengklasifikasikan kedua vektor input tersebut ke dalam kelas yang sama. Jaringan Self Organizing Kohonen merupakan salah satu model jaringan syaraf tiruan yang menggunakan metode pembelajaran tanpa supervisi atau tak terbimbing yang menyerupai model jaringan syaraf manusia. Untuk mempercepat proses komputansi pada training dan recognition maka dibangun sebuah algoritma kombinasi antara LVQ dengan Self Organizing Kohonen dengan memodifikasi pemberian bobot sehingga diperoleh waktu yang lebih singkat dalam proses training serta recognition.
COMBINATION ALGORITHM OF NEURAL NETWORK LEARNING legible signature, but many signatures that can not be read. However, a signature can be handled as an image so that it can be recognized using pattern recognition applications in image processing. Because the signature is the primary mechanism for authentication and authorization in legal transactions, the need for research on the development of recognition applications and automatic signature verification and efficiently increases from year to year. The method is widely used in signature recognition is a method of artificial neural network. On artificial neural networks are learning and recognition. One neural network algorithm is Learning Vector Quantization ( LVQ ) and Self Organizing Kohonen. Processes that occur in the neural network method requires a relatively long time. It is influenced by the number of data samples are used as a means of weight training update. The more and the large size of the pattern being trained, the longer the time it takes the network. LVQ is a method of training the unsupervised competitive layer will automatically learn to classify input vectors into certain classes. The classes are generated depends on the distance between the input vectors. If there are 2 input vectors are nearly as competitive layer will then classify both the input vectors into the same class. Kohonen Self Organizing Network is one of the neural network model which uses learning methods or unguided unsupervised neural network model that resembles humans. To speed up the computing process in the training and recognition is then developed an algorithm and a combination of LVQ and Self Organizing Kohonen by modifying the weight given to obtain a shorter time in the process of training and recognition.
4.2.2 Proses Recognition 63
BAB 5 KESIMPULAN DAN SARAN 66
5.1 Kesimpulan 66
5.2 Saran 66
Gambar 3.14 Flow Chart Pengenalan Tanda Tangan Metode Self Organizing
Kohonen ………...…. 39
Gambar 3.15 Flow Chart Proses Pengenalan Tanda Tangan dengan Jaringan
New JST ………. 40
Gambar 3.16 Flow Chart Pengenalan Tanda Tangan Metode New JST… 41
Gambar 3.17 Flow Chart Pengenalan Tanda Tangan Metode New JST
(Lanjutan) ……….. 42
Gambar 4.1 Tampilan Menu Utama Aplikasi ………... 56
Gambar 4.2 Tampilan Proses Training Tanda Tangan Metode LVQ ….. 57
Gambar 4.3 Tampilan Proses Training Tanda Tangan Metode Self Organizing
Kohonen ……… 57
Gambar 4.4 Tampilan Proses Training Tanda Tangan Metode New JST. 58
Gambar 4.5 Tampilan Pengenalan Tanda Tangan Metode LVQ ……… 59
Gambar 4.6 Tampilan Pengenalan Tanda Tangan Metode Self Organizing
Kohonen ……….. 59
Gambar 4.7 Tampilan Pengenalan Tanda Tangan Metode New JST .... 60
Gambar 4.8 Tampilan Training Tanda Tangan Metode LVQ ……….... 61
Gambar 4.9 Tampilan Training Tanda Tangan Metode Self Organizing
Kohonen ……….. 62
Gambar 4.10 Tampilan Training Tanda Tangan Metode New JST …... 62
Gambar 4.11 Tampilan Pengenalan Tanda Tangan Metode LVQ ….... 63
Gambar 4.12 Tampilan Pengenalan Tanda Tangan Metode Self Organizing
Kohonen ………..… 64
DAFTAR TABEL
Halaman
Tabel 2.1 Perbedaan Jaringan Syaraf Biologis dengan JST ... 14
Tabel 3.1 Data Matrik Input Gambar ... 43
Tabel 3.2 Data Bobot ……….. 43
ABSTRAK
Tanda tangan adalah sebuah bentuk khusus dari tulisan tangan yang mengandung karakter khusus dan bentuk-bentuk tambahan yang sering digunakan sebagai bukti verifikasi identitas seseorang. Sebagian tanda tangan dapat dibaca, namun banyak pula tanda tangan yang tidak dapat dibaca. Kendati demikian, sebuah tanda tangan dapat ditangani sebagai sebuah citra sehingga dapat dikenali dengan menggunakan aplikasi pengenalan pola pada pengolahan citra. Karena tanda tangan merupakan mekanisme primer untuk authentication dan authorization dalam transaksi legal, maka kebutuhan akan penelitian pada pengembangan aplikasi pengenalan dan verifikasi tanda tangan secara otomatis dan efisien meningkat dari tahun ke tahun. Metode yang banyak digunakan dalam pengenalan tanda tangan adalah metode jaringan syaraf tiruan. Pada jaringan syaraf tiruan terdapat proses pembelajaran serta pengenalan. Salah satu algoritma jaringan syaraf tiruan adalah Learning Vector Quantization (LVQ) dan Self Organizing Kohonen. Proses-proses yang terjadi pada metode jaringan syaraf tiruan memerlukan waktu yang relatif lama. Hal ini dipengaruhi banyaknya sampel data yang digunakan sebagai alat update bobot yang dilatih. Semakin banyak dan besar ukuran dari pola yang dilatih, semakin lama pula waktu yang dibutuhkan jaringan. LVQ adalah suatu metode pelatihan pada lapisan kompetitif terawasi yang akan belajar secara otomatis untuk mengklasifikasikan vektor-vektor input kedalam kelas-kelas tertentu. Kelas-kelas-kelas yang dihasilkan tergantung pada jarak antara vektor-vektor input. Jika ada 2 vektor input yang hampir sama maka lapisan kompetitif akan mengklasifikasikan kedua vektor input tersebut ke dalam kelas yang sama. Jaringan Self Organizing Kohonen merupakan salah satu model jaringan syaraf tiruan yang menggunakan metode pembelajaran tanpa supervisi atau tak terbimbing yang menyerupai model jaringan syaraf manusia. Untuk mempercepat proses komputansi pada training dan recognition maka dibangun sebuah algoritma kombinasi antara LVQ dengan Self Organizing Kohonen dengan memodifikasi pemberian bobot sehingga diperoleh waktu yang lebih singkat dalam proses training serta recognition.
COMBINATION ALGORITHM OF NEURAL NETWORK LEARNING legible signature, but many signatures that can not be read. However, a signature can be handled as an image so that it can be recognized using pattern recognition applications in image processing. Because the signature is the primary mechanism for authentication and authorization in legal transactions, the need for research on the development of recognition applications and automatic signature verification and efficiently increases from year to year. The method is widely used in signature recognition is a method of artificial neural network. On artificial neural networks are learning and recognition. One neural network algorithm is Learning Vector Quantization ( LVQ ) and Self Organizing Kohonen. Processes that occur in the neural network method requires a relatively long time. It is influenced by the number of data samples are used as a means of weight training update. The more and the large size of the pattern being trained, the longer the time it takes the network. LVQ is a method of training the unsupervised competitive layer will automatically learn to classify input vectors into certain classes. The classes are generated depends on the distance between the input vectors. If there are 2 input vectors are nearly as competitive layer will then classify both the input vectors into the same class. Kohonen Self Organizing Network is one of the neural network model which uses learning methods or unguided unsupervised neural network model that resembles humans. To speed up the computing process in the training and recognition is then developed an algorithm and a combination of LVQ and Self Organizing Kohonen by modifying the weight given to obtain a shorter time in the process of training and recognition.
BAB 1 PENDAHULUAN
1.1Latar Belakang
Jaringan Syaraf Tiruan (JST) adalah sebuah alat pemodelan data statistik non-linier.
JST dapat digunakan untuk memodelkan hubungan yang kompleks antara input dan
output untuk menemukan pola-pola pada data. Jaringan Syaraf Tiruan merupakan
salah satu sistem pemrosesan informasi yang didesain dengan menirukan cara kerja
otak manusia dalam menyelesaikan suatu masalah dengan melakukan proses
pembelajaran melalui perubahan bobot sinapsisnya. Sebuah JST dikonfigurasikan
untuk aplikasi tertentu seperti pengenalan pola atau klasifikasi data, melalui proses
pembelajaran. Pada proses pembelajaran, kedalam jaringan saraf tiruan dimasukkan
pola-pola input atau output lalu jaringan akan diajari untuk memberikan jawaban yang
bisa diterima.
Pada penelitian Prabowo dengan judul Perbandingan Antara Metode Kohonen
Neural Network dengan Metode Learning Vector Quantization pada Pengenalan Pola
Tandatangan memberikan hasil bahwa dengan menggunakan pola-pola yang sudah
disediakan, metode LVQ lebih akurat dalam mengklasifikasikan tanda tangan dengan
rata-rata keberhasilan sebesar 93.80 % dibanding dengan metode Kohonen (89.59%).
Hal ini disebabkan proses update faktor pembobot metode LVQ yang menggunakan
banyak pola untuk proses pelatihan dibandingkan metode Kohonen yang bobot
awalnya diambil secara acak dan di-update hingga dapat mengklasifikasikan diri
sejumlah kelas yang diinginkan (Prabowo, 2006).
Proses pembelajaran menggunakan metode LVQ memerlukan waktu yang relatif
lebih lama daripada metode Kohonen. Hal ini dipengaruhi banyaknya sampel pola
yang digunakan sebagai alat update bobot yang dilatih. Semakin banyak dan besar
ukuran dari pola yang dilatih, semakin lama pula waktu yang dibutuhkan metode LVQ
untuk proses pelatihan.
Dari hasil perbandingan diatas didapat bahwa metode Kohonen dapat melakukan
proses pembelajaran lebih cepat untuk mengklasifikasikan tandatangan dibanding
metode LVQ meskipun dari faktor keberhasilan dalam mengklasifikasikan pola,
JST terdiri dari beberapa metode yaitu metode Hebb Rule, Perceptron, Delta Rule,
Backpropagation, Heteroassociative Memory (BAM), Learning Vector Quantization
serta Self Organizing Kohonen. Jaringan syaraf yang digunakan oleh penulis adalah
jaringan syaraf tiruan dengan metode Learning Vector Quantization (LVQ) dan
metode Backpropagation. Disini penulis ingin mengkombinasikan kedua metode di
atas untuk mempercepat proses pengenalan tanda tangan.
LVQ adalah suatu metode pelatihan pada lapisan kompetitif terawasi yang akan
belajar secara otomatis untuk mengklasifikasikan vektor-vektor input kedalam
kelas-kelas tertentu. Kelas-kelas-kelas yang dihasilkan tergantung pada jarak antara vektor-vektor
input. Jika ada 2 vektor input yang hampir sama maka lapisan kompetitif akan
mengklasifikasikan kedua vektor input tersebut ke dalam kelas yang sama.
Jaringan Self Organizing Kohonen merupakan salah satu model jaringan syaraf
tiruan yang menggunakan metode pembelajaran tanpa supervisi atau tak terbimbing
(unsupervised learning) yang menyerupai model jaringan syaraf manusia. Sifat
antropometric tersebut ditunjukkan dengan kemampuan menerima masukan dan
reaksinya yang lazim dimiliki manusia (Valenturf, 1995). Keunggulan lain dari
algoritma Self Organizing Kohonen adalah mampu untuk memetakan data berdimensi
tinggi kedalam bentuk peta berdimensi rendah. Proses pemetaan terjadi apabila sebuah
pola berdimensi bebas diproyeksikan dari ruang masukan ke posisi pada array
berdimensi satu atau dua.
Tanda tangan adalah sebuah bentuk khusus dari tulisan tangan yang mengandung
karakter khusus dan bentuk-bentuk tambahan yang sering digunakan sebagai bukti
verifikasi identitas seseorang. Sebagian tanda tangan dapat dibaca, namun banyak pula
tanda tangan yang tidak dapat dibaca (unreadable). Kendati demikian, sebuah tanda
tangan dapat ditangani sebagai sebuah citra sehingga dapat dikenali dengan
menggunakan aplikasi pengenalan pola pada pengolahan citra (Qur’ani, 2010).
Karena tanda tangan merupakan mekanisme primer untuk authentication dan
authorization dalam transaksi legal, kebutuhan akan penelitian pada pengembangan
aplikasi pengenalan dan verifikasi tanda tangan yang otomatis dan efisien meningkat
pada tahun-tahun terakhir ini (Qur’ani, 2010).
Pengenalan dan verifikasi tanda tangan meliputi dua bagian yang berbeda tetapi
berkaitan erat satu sama lain. Yang pertama adalah identifikasi dari pemilik tanda
atau dipalsukan. Selain itu, bergantung pada kebutuhannya, pengenalan tanda
tangan dibagi menjadi dua kelas yang berbeda yaitu pengenalan dan verifikasi tanda
tangan online dan offline. Pada pengenalan secara on line, dibutuhkan beberapa alat
bantu khusus yang digunakan untuk mengukur kecepatan dan tekanan tangan ketika
membuat tanda tangan. Dilain pihak, hampir semua sistem pengenalan tanda tangan
offline bergantung pada teknik pengolahan citra dan feature extraction (Qur’ani,
2010).
Dengan melihat penelitian Prabowo diatas, maka penulis berniat melakukan
melakukan kombinasi dari kedua algoritma dengan mengambil kelebihan dari
masing-masing algoritma diatas dan memberi judul tesis ini dengan Kombinasi Algoritma
Jaringan Syaraf Tiruan Learning Vector Quantization (LVQ) dengan Self Organizing
Kohonen pada Kecepatan Pengenalan Pola Tanda Tangan.
1.2Rumusan Masalah
Berdasarkan latar belakang, maka yang menjadi rumusan masalah pada penelitian ini
adalah:
Bagaimana peningkatan kecepatan proses pengenalan pola tanda tangan dengan
mengkombinasikan algoritma Learning Vector Quantizatin dan Self Organizing
Kohonen.
1.3Tujuan Penelitian
Penelitian ini bertujuan untuk mengkombinasikan algoritma Learning Vector
Quantization dan Self Organizing Kohonen untuk mempercepat pengenalan pola tanda
tangan.
1.4Batasan Masalah
Adapun batasan masalah pada tesis ini adalah:
a. Input data pelatihan dan pengujian berupa file citra tanda tangan hasil scan
b. Proses kecepatan pengenalan pola tandatangan dilakukan dengan
mengkombinasi algoritma Learning Vector Quantization dengan Self
Organizing Kohonen.
1.5Metodologi Penelitian
Metode penelitian dalam penyusunan tugas ini dibagi menjadi dua tahap yaitu, tahap
pengumpulan data serta pembangunan perangkat lunak.
1.5.1 Tahap Pengumpulan Data
Teknik pengumpulan yang dilakukan adalah study pustaka atau study literatur.
Pengumpulan data dengan cara mengumpulkan literatur, jurnal, paper dan
bacaan-bacaan yang ada kaitannya dengan judul penelitian.
1.5.2 Tahap Pembangunan Perangkat Lunak
Pada tahap ini dilakukan penulisan program yang sesuai dengan algoritma yang sudah
BAB 2
LANDASAN TEORI
2.1 Citra Digital
Citra merupakan fungsi kontinyu dari intensitas cahaya pada bidang dua dimensi.
Intensitas cahaya merupakan hasil kali antara jumlah pancaran (illuminasi) cahaya
yang diterima objek dengan derajat kemampuan obyek memantulkan cahaya. Citra
digital umumnya direpresentasikan dalam bentuk matriks 2 dimensi dengan ukuran
NxM. Elemen terkecil dalam citra digital (elemen matriks) disebut pixel. Setiap nilai
pixel pada citra merepresentasikan nilai intensitas cahaya (Budi, 2009).
Nilai fungsi intensitas f(x,y) memiliki rentang nilai yang disebut skala keabuan, yaitu:
l min < f(x,y) < l max atau 0 f(x,y) L-1 ... (1)
Dimana:
f(x,y) : nilai intensitas pada posisi x,y.
lmax = L : nilai max intensitas (skala keabuan)
l min : nilai min intensitas
Suatu citra dapat didefinisikan sebagai fungsi f(x,y), berukuran M baris dan N
kolom, dengan x dan y adalah koordinat spasial dan amplitudo f di titik kordinat f(x,y)
dinamakan intensitas atau tingkat keabuan dari citra pada titik tersebut. Apabila nilai
x, y dan nilai amplitudo f secara keseluruhan berhingga (finite) dan nilai bernilai
Kordinat citra digital dapat dilihat pada Gambar 2.1.
Gambar 2.1 Kordinat Citra Digital
Sebuah citra digital dapat diwakili oleh sebuah matriks dua dimensi f(x,y) yang
terdiri dari M kolom dan N baris, dimana perpotongan antara kolom dan baris disebut
piksel (pixel = picture element) atau elemen terkecil dari sebuah citra. Citra digital
dapat ditulis dalam bentuk matrik sebagai berikut (Kusumanto,, 2011).
………... (2)
Suatu citra ƒ(x,y) dalam fungsi matematis dapat dituliskan sebagai berikut:
0 x M-1
0 y N-1
0 ƒ(x,y) G-1
dimana :
M = jumlah piksel baris (row) pada array citra
G = nilai skala keabuan (graylevel)
Besarnya nilai M, N dan G pada umumnya merupakan perpangkatan dari dua.
M = 2m ; N = 2n; G = 2k ... (3)
Dimana:
Nilai m, n dan k adalah bilangan bulat positif. Interval (0,G) disebut skala keabuan
(grayscale). Besar G tergantung pada proses digitalisasinya. Biasanya keabuan 0 (nol)
menyatakan intensitas hitam dan 1 (satu) menyatakan intensitas putih. Untuk citra 8
bit, nilai G sama dengan 28 = 256 warna (derajat keabuan).
Gambar 2.2 Representasi Citra Digital Dalam 2 Dimensi (Kusumanto, 2011)
Jenis citra berdasarkan nilai pikselnya adalah sebagai berikut (Putra, 2010):
1. Citra Biner
Citra biner adalah citra digital yang hanya memiliki dua kemungkinan nilai piksel
yaitu hitam dan putih. Citra biner juga disebut sebagai citra black and white (B&W)
atau citra monokrom. Hanya dibutuhkan 1 bit untuk mewakili nilai setiap piksel dari
citra biner. Citra biner sering kali muncul sebagai hasil dari proses pengolahan seperti
Gambar 2.3 Citra Biner (Putra, 2010)
2. Citra Grayscale
Citra grayscale merupakan citra digital yang hanya memiliki satu nilai kanal pada
setiap pikselnya, dengan kata lain nilai bagian RED=Green=Blue. Nilai tersebut
digunakan untuk menunjukkan tingkat intensitas. Warna yang dimiliki adalah warna
dari hitam, keabuan dan putih. Tingkatan keabuan disini merupakan warna abu
dengan berbagai tingkatan dari hitam hingga mendekati putih. Citra grayscale berikut
memiliki kedalaman warna 8 bit (256 kombinasi warna keabuan).
Gambar 2.4 Citra Keabuan (Putra, 2010)
3. Citra Warna (8 bit)
Setiap piksel dari citra warna (8 bit) hanya diwakili oleh 8 bit dengan jumlah warna
maksimum yang dapat digunakan adalah 256 warna. Ada dua jenis citra warna 8 bit.
Pertama, citra warna 8 bit dengan menggunakan palet warna 256 dengan setiap
paletnya memiliki pemetaan nilai (colormap) RGB tertentu. Model ini lebih sering
digunakan. Kedua, setiap pixel memiliki format 8 bit sebagai berikut.
Bit-7 Bit-6 Bit-5 Bit-4 Bit-3 Bit-2 Bit-1 Bit-0
R R R G G G B B
Gambar 2.5 8 bit true color
Gambar 2.6 Citra Warna 8 bit (Putra, 2010)
4. Citra Warna (16 bit)
Citra warna 16 bit (biasanya disebut sebagai citra highcolor) dengan setiap pikselnya
diwakili dengan 2 byte memory (16 bit). Warna 16 bit memiliki 65536 warna.
Gambar 2.7 Citra Warna 16 bit (Putra, 2010)
5. Citra Warna (24 bit)
2.2Pengolahan Data Citra
Data yang digunakan dalam penelitian ini adalah sekumpulan citra untuk
pembelajaran (learning data set) dan sekumpulan citra untuk pengujian (testing
data set) yang diperoleh dari hasil scanning tanda tangan. Citra tanda tangan yang
digunakan berukuran 340 x 272 pixel. Citra tersebut mengalami proses konversi
ke gray scaling jika merupakan citra true color, selanjutnya citra akan dikenai proses
deteksi tepi berbasis gradien dengan operator Roberts, yang dilanjutkan dengan proses
operasi negasi. Citra analisis merupakan citra grayscale dengan skala 8 bit yang
memiliki intensitas warna berkisar antara 0 sebagai nilai minimum sampai 255 yang
merupakan nilai maksimum. Citra analisis kemudian dikonversi ke dalam barisan
bilangan biner sepanjang 340 x 272 untuk masing-masing citra. Untuk setiap pixel
dengan nilai intensitas warna 237 diberi nilai 1, sedangkan untuk nilai intensitas
warna > 237 diberi nilai 0, sehingga akan diperoleh barisan nilai yang terdiri
dari 0 dan 1 sepanjang 92480 elemen. Kemudian dilakukan proses pembagian
region (wilayah) sehingga menghasilkan 10 x 8 region yang berisi penjumlahan nilai
pixel dalam region yang masing-masingnya berukuran 34x34 pixel.
2.3Edge Detection Method
Edge detection atau deteksi tepi digunakan untuk melihat apakah suatu edge atau tepi
melewati atau berada di dekat suatu titik (pixel) dalam sebuah citra (Sigit,dkk.,2005).
Tepi adalah batas antara dua daerah dengan sifat tingkat keabuan yang relatif berbeda.
Tujuan dari deteksi tepi adalah menandai bagian yang menjadi detil citra, dan
memperbaiki detil citra yang kabur karena error atau efek proses akuisisi citra (Sigit,
dkk.,2005). Batas suatu obyek semakin nampak bersamaan dengan ketidak
kontinuitasan intensitas dalam suatu citra. Eksperimen pada sistem penglihatan
manusia menunjukkan bahwa suatu citra sangat penting, bahkan suatu obyek dapat
dikenali hanya dari garis bentuk kasarnya saja (croude outline). Kenyataan ini
merupakan konsep prinsip untuk merepresentasikan suatu obyek melalui batasnya.
Tepi lokal (local edge) adalah daerah kecil dalam suatu citra yang tingkat keabuan
lokalnya berubah dengan sangat cepat dengan cara yang sederhana (misalnya
monotonik). Operator tepi (edge operator) adalah operator matematis (atau yang hasil
komputasinya ekuivalen), yang dengan perluasan kecil, didesain untuk mendeteksi
keberadaan tepi lokal dalam suatu fungsi citra (Low, 1991). Pada intinya, ide yang
mendasari sebagian algoritma pendeteksian tepi adalah perhitungan suatu operator
derivatif lokal. Dalam teknik deteksi tepi ini, diasumsikan bahwa tepi adalah pixel
yang memiliki nilai gradien tinggi. Gradien itu sendiri adalah ukuran besarnya
perubahan intensitas yang terjadi.
Pada citra digital f(x,y) turunan berarah sepanjang sekian obyek akan bernilai
maksimum pada arah normal dari kontur tepian yang bersesuaian. Sifat ini
dipergunakan sebagai dasar pemanfaatan operator gradien sebagai deteksi tepi.
Gradien suatu citra f(x,y) pada lokasi x,y data didefinisikan sebagai vektor.
... (2.1)
Operator gradien menghitung intensitas perubahan tingkat keabuan dan arah dimana
bertetangga. Operator Robert Cross adalah operator gradien yang sederhana berukuran
2 x 2. Operator ini menyediakan pendekatan paling sederhana dari magnitude gradien,
yang dapat ditunjukkan dengan fungsi matematis berikut ini, yaitu:
... (2.2)
Mask konvolusi untuk Operator Roberts adalah:
Gambar 2 menunjukkan algoritma deteksi tepi dengan operator Robert yang diikuti
dengan proses negasi. Pengurangan 255 terhadap nilai hasil penjumlahan 2 konvolusi
dari citra dimaksudkan untuk menegasikan, karena hasil konvolusi biasanya berada di
sekitar nilai 0 (nilai kecil), sehingga jika ditampilkan, citra tepi kebanyakan berwarna
gelap (hitam).
2.4Jaringan Syaraf Biologi
Otak manusia memiliki struktur yang sangat kompleks dan memiliki kemampuan
yang luar biasa. Otak terdiri dari neuron-neuron dan penghubung yang disebut
sinapsis. Neuron bekerja berdasarkan impuls/sinyal yang diberikan pada neuron.
Neuron meneruskannya pada neuron lain. Diperkirakan manusia memiliki 1012 neuron
dan 6x1018 sinapsis. Dengan jumlah yang begitu banyak, otak mampu mengenali pola,
melakukan perhitungan, dan mengontrol organ-organ tubuh dengan kecepatan yang
lebih tinggi dibandingkan komputer digital (Puspitaningrum, 2006). Sebagai
perbandingan, pengenalan wajah seseorang yang sedikit berubah misal memakai topi,
memiliki jenggot tambahan dan lainnya akan lebih cepat dilakukan manusia
dibandingkan komputer. Pada waktu lahir, otak mempunyai struktur yang
menakjubkan karena kemampuannya membentuk sendiri aturan-aturan/pola
berdasarkan pengalaman yang diterima. Jumlah dan kemampuan neuron berkembang
seiring dengan pertumbuhan fisik manusia, terutama pada umur 0-2 tahun. Pada 2
Gambar 2.10 Susunan Neuron Biologis [Puspitaningrum, 2006]
Menurut Medsker dan Liebowitz dalam Septiani (2005) perbedaan terminologis
antara jaringan syaraf biologis dan tiruan disajikan pada Tabel 2.1.
Tabel 2.1 Perbedaan Jaringan Syaraf Biologis dengan JST [Septiani, 2005]
Neuron memiliki 3 komponen penting yaitu dendrit, soma dan axon. Dendrit
menerima sinyal dari neuron lain. Sinyal/tersebut berupa impuls elektrik yang dikirim
melalui celah sinaptik melalui proses kimiawi. Sinyal tersebut dimodifikasi
(diperkuat/diperlemah) di celah sinaptik. Berikutnya, soma menjumlahkan semua
sinyal-sinyal yang masuk. Kalau jumlahan tersebut cukup kuat dan melebihi batas
ambang (threshold), maka sinyal tersebut akan diteruskan ke sel lain melalui axon.
Frekuensi penerusan sinyal berbeda-bedaantara satu sel dengan yang lain. Neuron
biologi merupakan sistem yang "fault tolerant" dalam 2 hal. Pertama, manusia dapat
mengenali sinyal input yang agak berbeda dari yang pernah kita terima sebelumnya.
Sebagai contoh, manusia sering dapat mengenali seseorang yang wajahnya pernah
dilihat dari foto, atau dapat mengenali seseorang yang wajahnya agak berbeda karena
sudah lama tidak dijumpainya. Kedua, otak manusia tetap mampu bekerja meskipun
neuron lain kadang-kadang dapat dilatih untuk menggantikan fungsi sel yang rusak
tersebut.
2.5Jaringan Syaraf Tiruan (Neural Network (NN))
Jaringan Syaraf Tiruan (JST) adalah suatu metode pembelajaran yang diinspirasi dari
jaringan sistem pembelajaran biologis yang terjadi dari jaringan sel syaraf (neuron)
yang terhubung satu dengan yang lainnya (Silvia, 2007).
Berikut adalah beberapa definisi JST :
a. JST adalah suatu teknik pemrosesan informasi berbasis komputer yang
mensimulasikan dan memodelkan sistem syaraf biologis.
b. Suatu model matematik yang mengandung sejumlah besar elemen pemroses
yang diorganisasikan dalam lapisan-lapisan.
c. Suatu sistem komputasi yang dibuat dari sejumlah elemen pemroses yang
sederhana dan saling diinterkoneksikan untuk memproses informasi melalui
masukan dari luar dan mampu inresponsi keadaan yang dinamis.
d. JST adalah suatu teknologi komputasi yang berbasis hanya pada model syaraf
biologis dan mencoba mensimulasikan tingkah laku dan kerja model syaraf.
e. JST adalah sistem pemroses informasi yang memiliki karakteristik mirip
dengan jaringan syaraf biologi. JST dibentuk sebagai generalisasi model
matematika dari jaringan syaraf biologi, dengan asumsi bahwa :
1. Pemrosesan informasi terjadi pada banyak elemen sederhana (neuron).
2. Sinyal dikirirnkan diantara neuron-neuron melalui penghubung-penghubung.
3. Penghubung antar neuron memiliki bobot yang akan memperkuat atau
memperlemah sinyal.
4. Untuk menentukan output, setiap neuron menggunakan fungsi aktivasi
(biasanyabukan fungsi linier) yang dikenakan pada jumlahan input yang
diterima. Besarnya output ini selanjutnya dibandingkan dengan suatu batas
ambang.
2.5.1 Arsitektur Jaringan Syaraf
Ada beberapa arsitektur jaringan syaraf (Silvia, 2007), antara lain:
Pada jaringan ini, sekumpulan masukan neuron dihubungkan langsung dengan
sekumpulan keluarannya. Sinyal mengalir searah dari layar (lapisan) masukan
sampai layar (lapisan) keluaran. Setiap simpul dihubungkan dengan simpul
lainnya yang berada diatasnya dan dibawahnya, tetapi tidak dengan simpul yang
berada pada lapisan yang sama.
Model yang masuk kategori ini antara lain : ADALINE, Hopfield, Perceptron,
LVQ, dan lain-lain. Pada gambar berikut diperlihatkan arsitektur jaringan layar
tunggal dengan n buah masukan (x1, x2,..., xn) dan m buah keluaran (y1, y2,...,
ym)
Gambar 2.11 Jaringan Syaraf Tiruan dengan Lapisan Tunggal [Puspitorini, 2008]
b. Jaringan dengan Banyak Lapisan (Multiple Layer Network)
Jaringan dengan banyak lapisan memiliki 1 atau lebih lapisan yang terletak
diantara lapisan input dan lapisan output. Seperti terlihat gambar dibawah ada
lapisan lapisan yang terletak diantara 2 lapisan yang bersebelahan. Jaringan
dengan banyak lapisan ini dapat menyelesaikan permasalahan lebih sulit dari pada
jaringan lapisan tunggal, tentu saja dengan pembelajaran yang lebih rumit.
Namun demikian, pada banyak kasus, pembelajaran pada jaringan dengan banyak
lapisan ini lebih sukses dalam menyelesaikan masalah. Model yang termasuk
kategori ini antara lain : MADALINE, backpropagation.
Pada Gambar 2.3 diperlihatkan jaringan dengan n buah unit masukan (x1, x2,...,
xn), sebuah layar tersembunyi yang terdiri dari m buah unit (z1,z2,...,zm) dan 1
Gambar 2.12 Jaringan Syaraf Tiruan dengan Banyak Lapisan [Puspitorini, 2008]
c. Jaringan Reccurent
Model jaringan reccurent (reccurent network) mirip dengan jaringan layar
tunggal ataupun jamak. Hanya saja, ada simpul keluaran yanng memberikan
sinyal pada unit masukan (sering disebut feedback loop). Dengan kata lain sinyal
mengalir dua arah, yaitu maju dan mundur. Contoh : Hopfield network, Jordan
network, Elmal network.
2.5.2 Keuntungan Menggunakan Komputasi dengan JST
Kemampuan dan proses komputasi pada JST memberikan keuntungan-keuntungan
sebagai berikut :
1. JST bersifat adaptif terhadap perubahan parameter yang mempengaruhi
karakteristik sistem, sehingga pada proses belajar, JST mampu belajar secara
adaptif dan melaksanakan tugas berbasis pada data yang diberikan saat
pelatihan.
2. JST memiliki kekebalan atau toleran terhadap kesalahan. Artinya, JST tetap
berfungsi walaupun ada ketidak-lengkapan data yang dimasukkan. JST
mempunyai kemampuan mengisi bagian masukan yangkurang lengkap
sedemikian rupa sehingga tetap diperoleh keluaran yang lengkap.
3. JST dapat dilatih memberikan keputusan dengan memberikan set pelatihan
sebelumnya untuk mencapai target tertentu, sehingga JST mampu
membangun dan memberikan jawaban sesuai dengan informasi yang diterima
pada proses pelatihan.
4. JST mempunyai struktur paralel dan terdistribusi. Artinya, komputasi dapat
5. JST mampu mengklasiflkasi pola masukan dan pola keluaran. Melalui proses
penyesuaian, pola keluaran dihubungkan dengan masukan yang diberikan
oleh JST.
6. JST mengurangi derau, sehingga dihasilkan keluaran yang lebih bersih.
7. JST dapat dimanfaatkan pada proses optimisasi penyelesaian suatu masalah.
8. JST dapat digunakan pada proses pengendalian sistem agar masukan
memperoleh tanggapan yang diinginkan.
2.5.3 Algoritma Umum Jaringan Syaraf Tiruan
Algoritma pembelajaran/pelatihan jaringan syaraf tiruan adalah sebagai berikut:
Dimasukkan n contoh pelatihan ke dalam jaringan saraf tiruan.
Lakukan :
1. Inisialisasi bobot-bobot jaringan. Set i = 1.
2. Masukkan contoh ke-i (dari sekumpulan contoh pembelajaran yang terdapat
dalam set pelatihan) ke dalam jaringan pada lapisan input.
3. Cari tingkat aktivasi unit-unit output menggunakan algoritma aplikasi.
If kinerja jaringan memenuhi standar yang ditentukan
sebelumnya (memenuhi syarat berhenti)
then exit.
4. Update bobot-bobot dengan menggunakan aturan pembelajaran jaringan.
If i=n, then reset i = 1.
Else i = i - 1.
Ke langkah 2.
Algoritma aplikasi/inferensi jaringan saraf tiruan :
Dimasukkan sebuah contoh pelatihan ke dalam jaringan saraf tiruan. Lakukan:
1. Masukkan kasus ke dalam jaringan pada lapisan input.
2. Hitung tingkat aktivasi node-node jaringan.
3. Untuk jaringan koneksi umpan maju, jika tingkat aktivasi dari semua unit
output-nya telah dikalkulasi, maka exit. Untuk jaringan koneksi balik, jika
tingkat aktivasi dari semua unit output menjadi konstan atau mendekati
konstan, maka exit. J jika tidak, kembali ke langkah 2. Jika jaringannya tidak
stabil, maka exit dan fail.
Ada beberapa fungsi aktivasi yang sering digunakan dalam jaringan saraf tiruan,
antara lain (Puspitorini, 2008):
a. Fungsi Undak Biner Hard Limit
Jaringan dengan lapisan tunggal sering menggunakan fungsi undak (step function)
untuk mengkonversikan input dari suatu variabel yang bernilai kontinu ke suatu
output biner (0 atau 1).
Fungsi undak biner hard limit dirumuskan sebagai berikut:
y =
Gambar 2.13 Fungsi aktivasi: Undak Biner Hard Limit [Puspitorini, 2008]
b. Fungsi Undak Biner Threshold
Fungsi undak biner dengan menggunakan nilai ambang sering juga disebut
dengan nama fungsi nilai ambang (threshold) atau fungsi Heaviside. Fungsi
undak biner (dengan nilai ambang ) dirumuskan sebagai berikut:
y =
Sumber: Puspitorini, 2008
Gambar 2.14 Fungsi aktivasi: Undak Biner Threshold [Puspitorini, 2008]
2.6Sejarah Jaringan Syaraf Tiruan
Jaringan syaraf tiruan sederhana pertama kali diperkenalkan oleh McCulloch dan Pitts
di tahun 1943. McCulloch dan Pitts menyimpulkan bahwa kombinasi beberapa neuron
sederhana menjadi sebuah sistem neural akan meningkatkan kemampuan
komputasinya. Bobot dalam jaringan yang diusulkan oleh McCulloch dan Pitts diatur
untuk melakukan fungsi logika sederhana. Fungsi aktivasi yang dipakai adalah fungsi
model jaringan yang disebut Perceptron. Metode pelatihan diperkenalkan untuk
mengoptimalkan hasil iterasinya.
Widrow dan Hoff (1960) mengembangkan perceptron dengan memperkenalkan
aturan pelatihan jaringan, yang dikenal sebagai aturan delta (atau sering disebut
kuadrat rata-rata terkecil). Aturan ini akan mengubah bobot perceptron apabila
keluaran yang dihasilkan tidak sesuai dengan target yang diinginkan. Apa yang
dilakukan peneliti terdahulu hanya menggunakan jaringan dengan layer tunggal
(single layer). Rumelhart (1986) mengembangkan perceptron menjadi
Backpropagation, yang memungkinkan jaringan diproses melalui beberapa layer.
Selain itu, beberapa model jaringan syaraf tiruan lain juga dikembangkan oleh
Kohonen (1972), Hopfield (1982) dan lainnya. Pengembangan yang ramai dibicarakan
sejak tahun 1990an adalah aplikasi model-model jaringan syaraf tiruan untuk
menyelesaikan berbagai masalah di dunia nyata.
Jaringan Syaraf Tiruan ditentukan oleh tiga hal :
1. Pola hubungan antar neuron (disebut arsitektur jaringan)
2. Metode untuk menentukan bobot penghubung (disebut metode
learning/training).
3. Fungsi aktivasi
2.7Paradigma Pembelajaran
Berdasarkan cara memodifikasi bobotnya, ada 2 macam pelatihan yang dikenal yaitu
dengan supervisi (supervised) dan tanpa supervisi (unsupervised). Dalam pelatihan
dengan supervisi, terdapat sejumlah pasangan data (masukan-target keluaran) yang
dipakai untuk melatih jaringan hingga diperoleh bobot yang diinginkan. Pasangan data
tersebut berfungsi sebagai "guru" untuk melatih jaringan hingga diperoleh bentuk
yang terbaik. "Guru" akan memberikan informasi yang jelas tentang bagaimana sistem
harus mengubah dirinya untuk meningkatkan unjuk kerjanya. Pada setiap kali
pelatihan, suatu input diberikan ke jaringan. Jaringan akan memproses dan
mengeluarkan keluaran. Selisih antara keluaran jaringan dengan target (keluaran yang
diinginkan) merupakan kesalahan yang terjadi. Jaringan akan memodifikasi bobot
sesuai dengan kesalahan tersebut. Jaringan perceptron, ADALINE dan
Backpropagation merupakan model-model yang menggunakan pelatihan dengan
ada "guru" yang akan mengarahkan proses pelatihan. Dalam pelatihannya, perubahan
bobot jaringan dilakukan berdasarkan parameter tertentu dan jaringan dimodifikasi
menurut ukuran parameter tersebut.
Sebagai contoh, dalam model jaringan kompetitif, jaringan terdiri dari 2 layar,
yaitu layar input dan layar kompetisi. Layar input menerima data eksternal. Layar
kompetitif berisi neuron-neuron yang saling berkompetisi agar memperoleh
kesempatan untuk merespon sifat-sifat yangada dalam data masukan. Neuron yang
memenangkan kompetisi akan memperoleh sinyal yang berikutnya ia teruskan. Bobot
neuron pemenang akan dimodifikasi sehingga lebih menyerupai data masukan.
Sebagai ilustrasi, pelatihan dengan supervisi dapat diandaikan sebagai skripsi yang
dibimbing oleh seorang dosen. Pada setiap kali pengumpulan berkas skripsi, dosen
akan mengkritik, mengarahkan dan meminta perbaikan agar kualitas skripsi
meningkat. Sebaliknya, Dalam pelatihan tanpa supervisi dapat dibayangkan sebagai
skripsi tanpa dosen pembimbing. Mahasiswa mengerjakan skripsi sebaik-baiknya
berdasarkan ukuran tertentu (misal dibandingkan dengan skripsi yang sudah ada
sebelumnya atau dibandingkan dengan hasil skripsi temannya). Berdasarkan hasil
yang pernah dilaporkan, model pelatihan dengan supervisi lebih banyak digunakan
dan terbukti cocok dipakai dalam berbagai aplikasi. Akan tetapi kelemahan utama
pelatihan dengan supervisi adalah dalam hal pertumbuhan waktu komputasinya yang
berorde eksponensial. Ini berarti untuk data pelatihan yang cukup banyak, prosesnya
menjadi sangat lambat.
2.7.1 Pelatihan Dengan Supervisi
Jaringan memberikan tanggapan dengan mendapatkan target tertentu. Sebelum
jaringan mengubah sendiri bobotnya untuk mencapai target, bobot interkoneksi
diinisialisasi. Proses belajar JST dengan pengawasan adalah proses belajar dengan
memberikan latihan untuk mencapai suatu target keluaran yang ditentukan. JST
mendapatkan latihan untuk mengenal pola-pola tertentu. Dengan memberikan target
keluaran, perubahan masukan akan diadaptasi oleh keluaran dengan mengubah bobot
interkoneksinya mengikuti algoritma belajar yang ditentukan. Set pelatihan dipilih
dari fungsi keluaran maksimum setiap keadaan parameter yang diubah. Dengan
menginisialisasi bobot tiap sel, JST akan mencari error terkecil, sehingga bentuk
dilakukan, kita perlu memperhatikan beberapa hal dalam menyusun set pelatihan,
yaitu:
a. Pemberian urutan pola yang akan diajarkan
b. Kriteria perhitungan error
c. Kriteria proses belajar
d. Jumlah iterasi yang harus dilalui
e. Inisialisasi bobot dan parameter awal
Pelatihan dilakukan dengan memberikan pasangan pola-pola masukan dan
keluaran. Untuk keperluan pengendalian, pasangan pola tidak mengikuti rumusan
tertentu. JST harus dapat mengadaptasi masukan yang acak supaya keluaran tetap
mengikuti target. Lebih lanjut, proses pelatihan dilakukan dengan memberikan pola
yang menggunakan masukan acak dan bobot interkoneksi yang besar. Dengan
pemberian bobot yang besar, perbedaan target dan keluaran berkurang lebih cepat,
sehingga proses adaptasi akan lebih cepat pula. Salah satu proses belajar dengan
pengawasan adalah proses belajar menggunakan algoritma propagasi balik. Proses
belajar jaringan umpan balik dituliskan dalam bentuk algoritma propagasi balik yang
dikenal sebagai JPB. Jaringan Propagasi Balik (JPB) kadang-kadang dikenal sebagai
Multilayer Perceptron (MLP). Anda dapat menggunakan algoritma propagasi balik
untuk melatih jaringan lapis banyak.
2.7.2 Pelatihan Tanpa Supervisi
Pada pelatihan tanpa supervisi, jaringan tidak mendapatkan target, sehingga JST
mengatur bobot interkoneksi sendiri. Belajar tanpa pengawasan kadang-kadang diacu
sebagai Self-Organizing Learning, yakni belajar mengklasifikasikan tanpa dilatih.
Pada proses belajar tanpa pengawasan, JST akan mengklasifikasikan contoh pola-pola
masukan yang tersedia ke dalam kelompok yang berbeda-beda. Contoh JST dengan
belajar tanpa pengawasan adalah jaringan Kohonen.
2.8Jaringan Syaraf Learning Vector Quantization (LVQ)
Menurut Jang, et al. (1997) LVQ merupakan metode klasifikasi data adaptif
berdasarkan pada data pelatihan dengan informasi kelas yang diinginkan. Walaupun
merupakan suatu metoda pelatihan supervised tetapi LVQ menggunakan teknik data
clustering unsupervised untuk pra proses set data dan penentuan cluster center-nya.
Arsitektur jaringan LVQ hampir menyerupai suatu jaringan pelatihan kompetitif
tertentu. Kusumadewi dan Hartai (2006) menyatakan LVQ merupakan metoda untuk
melakukan pelatihan terhadap lapisan-lapisan kompetitif supervised. Lapisan
kompetitif akan belajar secara otomatis untuk melakukan klasifikasi terhadap vektor
input yang diberikan. Apabila beberapa vektor input memiliki jarak yang sangat
berdekatan, maka vektor-vektor input tersebut akan dikelompokkan dalam kelas yang
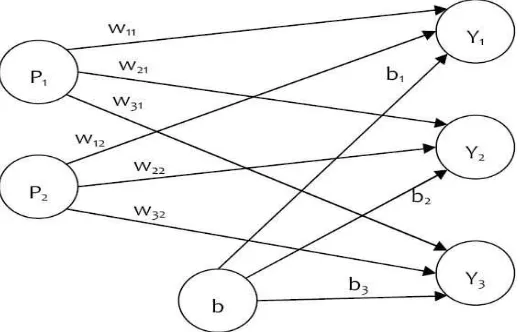
sama. Pemrosesan yang terjadi pada setiap neuron adalah mencari jarak antara suatu
vektor input ke bobot yang bersangkutan (w1 dan w2). Dimana w1 adalah vektor
bobot yang menghubungkan setiap neuron pada lapisan input ke neuron pertama pada
lapisan output, sedangkan w2 adalah vektor bobot yang menghubungkan setiap
neuron pada lapisan input ke neuron yang kedua pada lapisan output. Fungsi aktivasi
F1 akan memetakan y_in1 ke y1 = 1 apabila:
|X – w1| < |X – w2|, dan y1 = 0 jika sebaliknya.
Demikian pula dengan yang terjadi pada fungsi aktivasi F2, akan memetakan
y_in1 ke y1 = 1 apabila |X – w2| < |X – w1|, dan y1 = 0 jika sebaliknya.
Gambar 2.15 menunjukan jaringan LVQ dengan unit pada lapisan input, dan 2 unit
(neuron) pada lapisan output.
Gambar 2.15 Arsitektur Jaringan Learning Vector Quantization [Kusumadewi,2006]
Algoritma untuk LVQ adalah sebagai berikut:
Notasi x : training vector (X1, X2, ..., Xn)
T : kategori dari training vector yang benar
Wj : Vektor bobot untuk kategori j !
Cj : Kategori j (hasil training)
||X – Wj|| : jarak Euclidian.
Step 0 Inisialisasi
Step 1 Jika kondisi stop salah, lakukan step 2 s.d. step 6
Step 2 Untuk setiap vector training, lakukan step 3 s.d. step 4
Step 3 dapatkan j sehingga ||X – Wj|| minimum
Step 4 Update Wj
nantinya akan digunakan untuk melakukan simulasi atau pengujian data yang lain.
2.9Jaringan Syaraf Kohonen Self Organizing
Pada metode pembelajaran yang tak terawasi ini tidak memerlukan target output. Pada
metode ini, tidak dapat ditentukan hasil yang seperti apakah yang diharapkan selama
proses pembelajaran. Selama proses pembelajaran, nilai bobot disusun dalam suatu
range tertentu tergantung pada nilai input yang diberikan. Tujuan pembelajaran ini
adalah mengelompokkan unit-unit yang hampir sama dalam suatu area tertentu
(Puspitorini, 2008).
Jaringan Syaraf Kohonen Self Organizing termasuk dalam pembelajaran tak
terawasi (unsupervised learning). Pertama kali diperkenalkan oleh Prof. Teuvo
Kohonen pada tahun 1982. Pada jaringan ini, suatu lapisan yang berisi neuron-neuron
akan menyusun dirinya sendiri berdasarkan input nilai tertentu dalam suatu kelompok
yang dikenal dengan istilah cluster. Selama proses penyusunan diri, cluster yang
memiliki vektor bobot paling cocok dengan pola input (memiliki jarak yang paling
dekat) akan terpilih sebagai pemenang. Neuron yang menjadi pemenang beserta
neuron-neuron tetangganya akan memperbaiki bobot-bobotnya (Tae, 2010).
Tujuan pembelajaran dari algoritma ini adalah untuk mentransformasikan suatu
pola sinyal masukan yang mempunyai dimensi yang berubah-ubah ke suatu peta yang
berdimensi satu atau dua. Sifat pemetaan yang dimiliki jaringan syaraf Kohonen Self
Organizing meniru pada otak manusia yang tidak terdapat pada jaringan syaraf tiruan
dimensi dan sinyal-sinyal masukan sejumlah n. Vektor bobot untuk suatu unit
kelompok disediakan satu eksemplar dari pola-pola masukan yang tergabung dengan
kelompok tersebut. Selama proses pengorganisasian sendiri, unit kelompok yang
memiliki vektor bobot paling cocok dengan pola masukan (ditandai dengan jarak
Euclidean paling minimum) dipilih sebagai pemenang. Unit pemenang dan unit
tetangganya diperbaharui bobotnya. Untuk susunan unit kelompok linier, tetangga
dengan radius R di sekitar unit kelompok jaringan terdiri atas semua unit jaringan
yang memenuhi maksimal fungsi Aj : ( 1, J-R < = j,= min (J+R, m) (Tae, 2010).
Arsitektur Jaringan Saraf Kohonen ditunjukkan pada Gambar 2.16.
Gambar 2.16 Arsitektur Jaringan Self OrganizingKohonen
[Kusumadewi,2006]
Algoritma pengelompokkan pola jaringan Self Organizing Koh (Tae, 2010) adalah
sebagai berikut:
Step 0 Inisialisasi awal
Bobot wij (random)
Nilai parameter learning rate ( ) dan faktor penurunannya
Bentuk dan jari-jari (R) topologi sekitarnya
Step 1 Selama kondisi penghentian bernilai salah, lakukan langkah 2 – 7
Step 2 Untuk setiap input vektor x, (i = 1, 2, …, n) lakukan langkah 3 – 5
Step 4 Tentukan indeks J sedemikian sehingga D(j) minimum
Step 5 Untuk setiap unit j di sekitar J, modifikasi bobot
Step 6 Modifikasi parameter learning rate
Step 7 Uji kondisi penghentian
Kondisi penghentian iterasi adalah selisih antara wij saat itu dengan wij pada iterasi
sebelumnya. Apabila semua wij hanya berubah sedikit saja, berarti iterasi sudah
mencapai konvergensi sehingga dapat dihentikan.
2.10 Jaringan Syaraf New JST
Pada metode pembelajaran pada JST ini merupakan jaringan yang tak terawasi serta
tidak memerlukan target output. Proses pembelajaran, nilai bobot disusun dalam suatu
range tertentu tergantung pada nilai input yang diberikan. Vektor-vektor input tersebut
akan dikelompokkan dalam kelas yang sama. Pemrosesan yang terjadi pada setiap
neuron adalah mencari jarak antara suatu vektor input ke bobot yang bersangkutan
(w1 dan w2). w1 adalah vektor bobot yang menghubungkan setiap neuron pada
lapisan input ke neuron pertama pada lapisan output, sedangkan w2 adalah vektor
bobot yang menghubungkan setiap neuron pada lapisan input ke neuron yang kedua
BAB 3
METODOLOGI PENELITIAN
Learning Vector Quantization (LVQ) adalah suatu metode untuk melakukan
pembelajaran pada lapisan kompetitif yang terawasi (dengan supervisi) dimana
jaringan akan secara otomatis belajar untuk mengklasifikasikan vektor-vektor input.
Kelas-kelas yang didapatkan sebagai hasil dari lapisan kompetitif ini hanya tergantung
pada jarak antara vektor-vektor input. Jika dua vektor input mendekati sama, maka
lapisan kompetitif akan meletakkan kedua vektor input tersebut ke dalam kelas yang
sama.
Pada pelatihan tanpa supervisi, jaringan tidak mendapatkan target, sehingga jaringan mengatur bobot interkoneksi sendiri. Belajar tanpa pengawasan
kadang-kadang diacu sebagai Self-Organizing Learning, yakni belajar mengklasifikasikan
tanpa dilatih. Pada proses belajar tanpa pengawasan, jaringan akan mengklasifikasikan
contoh pola-pola masukan yang tersedia ke dalam kelompok yang berbeda-beda.
Berdasarkan hasil yang pernah dilaporkan, model pelatihan dengan supervisi lebih banyak digunakan dan terbukti cocok dipakai dalam berbagai aplikasi. Akan tetapi
kelemahan utama pelatihan dengan supervisi adalah dalam hal pertumbuhan waktu
komputasinya yang berorde eksponensial. Ini berarti untuk data pelatihan yang cukup
banyak, prosesnya menjadi sangat lambat.
3.1 Rancangan Penelitian
Dalam melakukan kombinasi algoritma Learning Vector Quantization dengan Self Organizing
Kohonen untuk mempercepat proses pengenalan pola tandatangan penulis menyusun langkah
Gambar 3.1 Flow Chart Rancangan Penelitian
3.2 Bahan Penelitian
Bahan yang digunakan pada penelitian ini adalah tanda tangan berupa citra digital hasil akusisi dengan alat digital berupa scanner yang akan digunakan untuk pembelajaran (learning data set) dan sekumpulan citra untuk pengujian (testing data set). Proses praproses
(preprocessing)citra merupakan kumpulan proses – proses yang digunakan untuk
menyiapkan citra input untuk dijadikan masukan ke dalam jaringan. Proses praproses pada penelitian ini terbagi menjadi tiga tahap yaitu:
1. Proses scaling citra dengan dimensi 350 x 250 pixel. 2. Proses grayscaling
3. Proses edges detection 4. Proses Binerisasi
" # # $
% & $ " # # $
# $
' ( $ '
)*+,-. #
( $ ' / $
Pada proses scaling citra tanda tangan yang digunakan di-crop menjadi ukuran
350 x 250 pixel dan selanjutnya citra tersebut mengalami proses konversi ke
grayscaling jika merupakan citra true color, selanjutnya citra akan dikenai proses
deteksi tepi berbasis gradien dengan operator Sobel. Citra analisis merupakan citra
grayscale dengan skala 8 bit yang memiliki intensitas warna berkisar antara 0 sebagai
nilai minimum sampai 255 yang merupakan nilai maksimum.
Citra analisis kemudian dikenakan proses binerisasi yaitu dikonversikan ke dalam
bilangan biner dengan proses threshold (pengambangan) sepanjang 350 x 250 untuk
masing-masing citra. Untuk setiap pixel dengan nilai intensitas warna 128 diberi
nilai 0, sedangkan untuk nilai intensitas warna > 128 diberi nilai 1, sehingga akan
diperoleh barisan nilai yang terdiri dari 0 dan 1 sepanjang 87.500 piksel elemen.
Sebagai contoh citra tanda tangan seperti pada Gambar 3.2.
Gambar 3.2 Citra Tanda Tangan
3.3 Pembacaan File Citra
Pada citra warna 24-bit (true color) tidak terdapat palet RGB, karena nilai RGB
langsung diuraikan dalam data bitmap berbentuk biner. Untuk membaca nilai
RGB-nya, dilakukan mencari header-header serta data bitmap yang berisi informasi
dimensi, format dan nilai piksel citra. Setiap elemen data bitmap panjangnya 3 byte,
masing-masing byte menyatakan komponen R, G, dan B. Setiap byte data
merepresentasikan 8 bit, jadi pada citra warna ada 3 byte x 8 bit = 24 bit kandungan
warna.
Pada citra warna, tiap pixel-nya mengandung 24-bit kandungan warna atau 8-bit untuk masing-masing warna dasar (R, G, dan B), dengan kisaran nilai kandungan
antara 0 (00000000) sampai 255 (11111111) untuk tiap warna. Sebagai contoh suatu
Gambar 3.3 Contoh Nilai Piksel Citra Warna
Pada contoh citra Gambar 3.2 di atas, data pertama adalah header yang berisi informasi nama file, jenis format dan dimensi citra. Di bawah data bitmap terdapat pixel pertama mempunyai nilai = 100001111011010010100001.
Untuk mendapatkan nilai RGB setiap piksel dengan menggunakan rumus sebagai berikut: Nilai R = c and 255 ... (3.1)
Nilai G = (c and 65,280)/256 ... (3.2)
Nilai B = ((c and 16,711,680)/256)/256 ... (3.3)
Dimana c adalah nilai piksel citra
Pada Gambar 3.2 di atas, nilai piksel (0,0) adalah 111100001011010010111001
(24 bit). Nilai R dihitung dengan persamaan 3.1 sebagai berikut:
Nilai R = 100001111011010010100001 and 11111111 = 10100001 (Biner)
= 161 Desimal
Nilai komponen G dihitung dengan persamaan (3.2):
Nilai G = (100001111011010010100001 and 1111111100000000)/ 100000000
Sehingga diperoleh nilai piksel (0,0) 11110000 11110000 11111111:
Dalam analisa ini jumlah piksel yang dihitung sebanyak 25 piksel saja dan untuk
mendapatkan nilai RGB piksel selanjutnya dilakukan sama seperti cara di atas dan
selanjutnya nilai RGB semua nilai piksel pada citra dimasukkan ke dalam matriks
seperti pada Gambar 3.4.
161,180,135 152,140,110 182,166,210 166,112,178 170,177,166
202,189,134 201,180,111 140,173,110 192,120,200 112,167,162
133,200,152 165,100,155 124,110,167 140,180,126 200,160,200
141,204,104 134, 80,144 140,110,115 150,180,150 160,210,220
56,100,110 147,140,165 143,230,173 140,212,210 150,212,150
Gambar 3.4 Matriks Nilai RGB Citra Warna
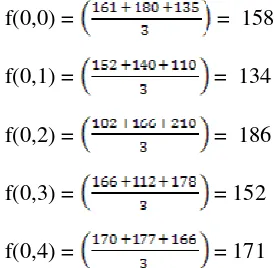
3.4 Menghitung Nilai Grayscale Citra
Matriks citra warna pada Gambar 3.3 di atas ditransformasikan menjadi citra
grayscale dengan menghitung rata-rata warna Red, Green dan Blue. Secara matematis
penghitungannya adalah sebagai berikut.
f0 (x,y) = ……… (3.4)
Sebagai contoh menghitung nilai grayscale citra pada Gambar 3.3 di atas
menggunakan persamaan (3.6) adalah sebagai berikut:
f(0,0) = = 158
f(0,1) = = 134
f(0,2) = = 186
f(0,3) = = 152
f(0,4) = = 171
Untuk menghitung nilai grayscale piksel selanjutnya dilakukan sama seperti cara
di atas, selanjutnya hasil nilai grayscale matriks citra warna dimasukkan ke dalam
158 134 186 152 171
110 164 111 170 0
166 100 155 114 125
47 155 172 174 200
175 0 47 90 144
Gambar 3.5 Matriks Nilai Grayscale
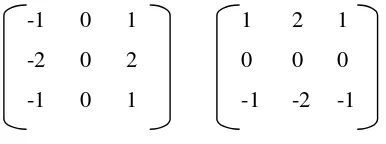
3.5 Deteksi Tepi
Deteksi tepi berfungsi untuk mempertegas batas batas citra atau untuk meningkatkan
penampakan garis batas garis tanda tangan. Pada penelitian ini digunakan operator
Sobel dengan dua buah kernel seperti pada Gambar 3.6.
-1 0 1 1 2 1
-2 0 2 0 0 0
-1 0 1 -1 -2 -1
Gambar 3.6 Dua Buah Matriks Kernel
Pada citra tanda tangan dilakukan deteksi tepi dengan mengambil 1 blok citra 3 x 3
Pixel seperti pada Gambar 3.7.
158 134 186 -1 0 1 1 2 1
110 164 111 -2 0 2 0 0 0
166 100 155 -1 0 1 -1 -2 -1
Gambar 3.7 Matriks citra 3x3 Pixel dengan Dua filter
sx = 158(-1) + 134(-2) + 186(-1) +166(1) +100(2) + 155(1)
= 478
sy = 158(1)+110(2)+166(1)+186(-1)+111(-2)+ 155(-1)
Perhitungan nilai magnitudo (M) adalah sebagai berikut:
M = |sx| + |sy|
M = |478| + |452|
M = 930
Citra hasil konvolusi yang diperoleh dari perhitungan deteksi tepi untuk pixel blok 3 x
3 adalah seperti pada Gambar 3.8.
* * *
* 930 * * * *
Gambar 3.8 Nilai Konvolusi (M) Sekitar Piksel 3x3
Dari hasil konvolusi, maka nilai magnitudo dibagi secara rata untuk ke 9 piksel yaitu
930 : 9 = 103 dan dimasukkan ke dalam matriks citra 3x3 seperti pada Gambar 3.9.
103 103 103
103 103 103
103 103 103
Gambar 3.9 Matriks Hasil Deteksi Tepi Citra 3x3
3.6 Binerisasi
Pemisahan citra grayscale diatas berfungsi untuk mengambil bagian citra yang
merupakan titik gelap (0) dan putih (1). Binerisasi dilakukan dengan membagi citra
menjadi 8x8 bagian subcitra, nilai intensitas rata-rata dari subcitra yang paling rendah
digunakan menjadi nilai threshold T. Setelah itu dilakukan proses binarisasi citra
menggunakan nilai threshold T. Persamaan yang digunakan untuk melakukan
binarisasi citra adalah sebagai berikut.
Dari matriks Gambar 3.4 dilakukan perhitungan Threshold untuk proses binerisasi
dimana jika nilai grayscale < 128 maka akan dimasukkan ke nilai 0, sedangkan jika
nilai grayscale > T akan dimasukkan ke nilai 1.
Nilai piksel (0,0) = 158, nilai piksel 158 > 128, maka nilai biner = 1
Nilai piksel (0,1) = 134, nilai piksel 134 >128, maka nilai biner = 1
Nilai piksel (0,2) = 186, nilai piksel 186 > 128, maka nilai biner = 1
Nilai piksel (0,3) = 152, nilai piksel 152 > 128, maka nilai biner = 1
Nilai piksel (1,0) = 171, nilai piksel 171 > 128, maka nilai biner = 1
Dari hasil perhitungan nilai threshold diatas dimasukkan ke dalam matriks citra
biner seperti pada Gambar 3.10.
1 1 1 1 1
0 1 0 1 0
1 0 1 0 1
0 1 1 1 1
1 0 0 0 1
Gambar 3.10 Matriks Citra Biner
Dengan g(x,y) adalah citra biner hasil proses binarisasi dari citra tanda tangan
dengan skala keabuan f(x,y), dengan nilai threshold T. Citra hasil threshold ini
menghasilkan tanda tangan biner seperti pada Gambar 3.11.
Citra grayscale tanda tangan Citra biner tanda tangan
Dengan diperolehnya citra tanda tangan biner, maka tahap preprocessing citra
sudah selesai dan selanjutnya citra biner pada Gambar 3.11 dilakukan proses
pengenalan pola dengan meode jaringan syaraf tiruan.
3.7Flow Chart Pengenalan Tanda Tangan dengan JST LVQ
Adapun flow chart proses pengenalan tanda tangan dengan jaringan syaraf Tiruan
(JST) dengan metode LVQ dapat dilihat seperti pada Gambar 3.12.
Gambar 3.12 Flow Chart Pengenalan Tanda Tangan metode LVQ
" # $ %
% 2 3 4 5 # $
% ' . $ *+,
6# 7 8 4.' 4) 9.' - : 6 ). '
--% % ' %
; 6 & 7
; 6 7 ;
;< &6 7 ;
% .' 4 .' 4 6
% 8 (= )
>-7 4 4;;;4 ; >>-7 4 4;;;4' >7
3 8 (= >(= 7
Gambar 3.13 Flow Chart Pengenalan Tanda Tangan metode LVQ (Lanjutan)
3.8Flow Chart Proses Pengenalan Tanda Tangan dengan JST Self Organizing Kohonen
Adapun flow chart proses pengenalan tanda tangan dengan jaringan syaraf tiruan
(JST) dengan metode Self Organizing Kohonen dapat dilihat seperti pada Gambar
3.14.
# $
6 & 76 & ?
@ % $
6 0 6
6 & 1 6 &
% 8 >
. # 7 "> ' >7 >? 6 ) % -. # 01 "> ' >7 > 6 ) %
Gambar 3.14 Flow Chart Pengenalan Tanda Tangan metode Self Organizing Kohonen < %
% 2 3 4 5
6A + B
6 & 76 & ?
3 ' 8 < $ C '
' ' 8 + ) %
-% ' * $ C ) 6 & 4 6 4 < &6
-' $ $ ' '
/ $ 2 $ 9( 2D
![Gambar 2.11 Jaringan Syaraf Tiruan dengan Lapisan Tunggal [Puspitorini, 2008]](https://thumb-ap.123doks.com/thumbv2/123dok/276012.24462/34.612.229.405.279.386/gambar-jaringan-syaraf-tiruan-dengan-lapisan-tunggal-puspitorini.webp)
![Gambar 2.12 Jaringan Syaraf Tiruan dengan Banyak Lapisan [Puspitorini, 2008]](https://thumb-ap.123doks.com/thumbv2/123dok/276012.24462/35.612.199.438.89.227/gambar-jaringan-syaraf-tiruan-dengan-banyak-lapisan-puspitorini.webp)
![Gambar 2.14 Fungsi aktivasi: Undak Biner Threshold [Puspitorini, 2008]](https://thumb-ap.123doks.com/thumbv2/123dok/276012.24462/37.612.118.516.114.520/gambar-fungsi-aktivasi-undak-biner-threshold-puspitorini.webp)
![Gambar 2.15 Arsitektur Jaringan Learning Vector Quantization [Kusumadewi,2006]](https://thumb-ap.123doks.com/thumbv2/123dok/276012.24462/41.612.140.477.419.601/gambar-arsitektur-jaringan-learning-vector-quantization-kusumadewi.webp)