PENGENDALI KECEPATAN MOTOR DC MENGGUNAKAN
SENSOR HALL BERBASIS MIKROKONTROLER
ATMega 8535
SKRIPSI
RONI SINAGA
080801049
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PENGENDALI KECEPATAN MOTOR DC MENGGUNAKAN
SENSOR HALL BERBASIS MIKROKONTROLER
ATMEGA8535
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar sarjana sains
RONI SINAGA 080801049
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : PENGENDALI KECEPATAN MOTOR DC MENGGUNAKAN SENSOR HALL BERBASIS MIKROKONTROLER
ATMega 8535 Kategori : SKRIPSI
Nama : RONI SINAGA
NIM : 080801049
Program Studi : SARJANA (S1) FISIKA Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Dilaksanakan di : Medan, Agustus 2012
Diketahui/disetujui oleh
Ketua Departemen Fisika FMIPA USU Pembimbing
PERNYATAAN
PENGENDALI KECEPATAN MOTOR DC MENGGUNAKAN SENSOR HALL BERBASIS MIKROKONTROLER ATMEGA 8535
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dari ringkasan yang masing-masing disebutkan sumbernya.
Medan, Agustus 2012
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yesus Kristus karena atas penyertaan dan anugrah NYA selalu sehingga penulis dapat menyelesaikan skripsi ini. Tetapi oleh karena kasihNYA yang melimpah yang membantu, sehingga penulis dapat menyelesaikan skripsi ini, dengan judul : “Pengendali Kecepatan Motor Dc Menggunakan Sensor Hall Berbasis Mikrokontroler ATMega 8535”.
Ucapan terimakasih, juga penulis sampaikan kepada orang – orang yang menjadi bagian hidup penulis, terimakasih yang sebesar – besarnya kepada :
1. Bapak Dr. Marhaposan Situmorang sebagai dosen pembimbing penulis yang telah meluangkan waktu untuk membimbing, mengarahkan dan memberikan kepercayaan selama pengerjaan skripsi ini.
2. Dr. Marhaposan Situmorang Ketua Departemen Fisika beserta seluruh staf pengajar dan pegawai Departemen Fisika yang selalu memperhatikan terutama proses studi di Departemen Fisika FMIPA USU.
3. Kepada kedua orangtua saya I. Sinaga dan A. Sinulingga yang tiada henti membimbing dan setia selalu mendoakan penulis sedari kecil atas cinta kasih, teladan, dan semangat yang penulis rasakan dari mereka.
4. Adik-adik saya Cristina Debora Sinaga, Dian Natalia Sinaga dan Ragil Novo Sinaga yang telah mendukung penulis selama ini.
5. Nya Daniaty Malau , atas cinta dan kasih sayangnya, yang setia mengajari, memotivasi dan menemani penulis dalam mengerjakan skripsi ini.
7. Abang dan kakak senior.
8. Adik – adik stambuk 2009, 2010, dan 2011 yang telah memberi semangat untuk penulis dalam menyelesaikan skripsi ini.
Penulis menyadari bahwa skripsi ini masih jauh dari sempurna, untuk itu penulis mengharapkan saran dan kritik yang membangun demi penyempurnaan isi dan analisa yang disajikan. Akhir kata, semoga tulisan ini bermanfaat bagi pembaca.
Medan, Agustus 2012
ABSTRAK
PENGENDALI KECEPATAN MOTOR DC MENGGUNAKAN SENSOR HALL BERBASIS MIKROKONTROLER ATMega 8535
ABSTRACT
DC MOTOR SPEED CONTROL USING SENSOR HALL BASED MICROCONTROLLER ATMega 8535
DAFTAR ISI
Daftar Persamaan xii
BAB I PENDAHULUAN
1.1 Latar Belakang 1
1.2 Rumusan Masalah 2
1.3 Batasan Masalah 3
1.4 Tujuan Penulisan 3
1.5 Manfaat Penelitian 3
1.6 Sistematika Penulisan 4
BAB II TINJAUAN PUSTAKA 2.1 Motor
2.2 Motor DC 6
2.2.1 Prinsip Dasar dan Cara Kerja Motor DC 7
2.2.2 Karakteristik Motor DC 10
2.3 Sensor Efek Hall 11
2.4 Mikrokontroler 12
2.4.1 Mikrokontroler ATMega8535 12
2.4.2 Arsitektur ATMega8535 13
2.4.3 Konfigurasi Pin ATMega8535 15
2.4.4 Stack Pointer 17
2.4.5 Timer ATMega 8535 17
2.4.6 Sistem Clock 18
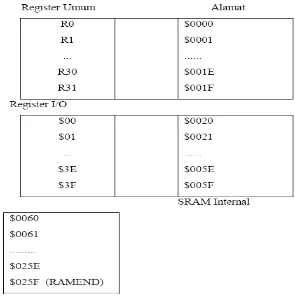
2.4.7 Organisasi Memory AVR ATMega 8535 19
2.4.8 ADC (Analog to Digital Converter) 21
2.4.9 PWM (Pulse Width Modulation) 21
2.5 LCD (Liquid Cristal Display) 25
BAB III PERANCANGAN SISTEM
3.1 Perancangan Alat 27
3.1.1 Diagram Blok Rangkaian 27
3.1.2 Diagram Blok Sistem Kontrol Alat 29
3.1.3 Rangkaian Power Supply (PSA) 29
3.1.5 Sensor Efek Hall 32 3.1.6 Rangkaian LCD (Liquid Crystal Display) 33 3.1.7 PWM(Pulse Width Modulation/ Modulasi Lebar Pulsa 34
3.1.8 Driver Motor 36
3.2 Perancangan Program 37
BAB IV PERANCANGAN SISTEM
4.1 Pengujian Minimum Sistem 38
4.1.1 Pengujian Sistem Mikrokontroller AVR ATMega8535 38
4.1.2 Pengujian LCD 39
4.1.3 Pengujian Motor DC 40
4.1.4 Pengujian Sensor 40
4.1.5 Pengujian ADC (Analog To Digital Converter) 41 4.2 Hasil Pengukuran Alat
4.2.1 Hasil Pengukuran Kecepatan Putar (rpm) 42
4.2.2 Analisa Ketelitian Alat 46
BAB V KESIMPULAN DAN SARAN
5.1 Kesimpulan 50
5.2 Saran 50
DAFTAR PUSTAKA 51
LAMPIRAN
A. Rangkaian Lengkap 52
B. Program di Mikrokontroler ATMega 8535 53
DAFTAR TABEL
Halaman
Tabel 2.1 Konfigurasi Data AVR 8535 20
Tabel 3.1 Peta memori LCD 33
Tabel 4.1 Pengujian Mikrokontroler 39
Tabel 4.2 Pengujian Motor DC 40
Tabel 4.3 Pengujian Sensor 40
Tabel 4.4 Hubungan ADC dengan Tegangan Variabel Resistor 41 Tabel 4.5 Pengukuran kecepatan putaran tanpa beban 43 Tabel 4.6 Pengukuran kecepatan putaran dengan beban 44 Tabel 4.7 Pengukuran kecepatan putaran setelah beban dilepas 45 Tabel 4.8 Kesalahan dan penyimpangan pengukuran kecepatan tanpa beban 46 Tabel 4.9 Kesalahan pengukuran kecepatan putaran dengan beban 47 Tabel 4.10 Kesalahan dan penyimpangan pengukuran kecepatan putaran setelah
DAFTAR GAMBAR
Halaman
Gambar 2.1 Motor DC Sederhana 7
Gambar 2.2 Arah medan magnet 7
Gambar 2.3 Medan magnet yang membawa arus mengelilingi konduktor 8 Gambar 2.4 Medan magnet mengelilingi konduktor diantara 2 kutub 8
Gambar 2.5 Reaksi garis fluks 8
Gambar 2.6 Prinsip kerja motor DC 9
Gambar 2.7 Hubungan torsi dan kecepatan 11
Gambar 2.8 Tranduser efek hall 11 Gambar 2.9 Blok diagram dan arsitektur ATMega 8535 14
Gambar 2.10 Konfugurasi PIN ATMega 8535 15
Gambar 2.11 Sistem Clock 19
Gambar 2.12 Memory Program 21
Gambar 2.13 Gelombang kotak pulsa 23
Gambar 2.14 Sinyal Referensi 24
Gambar 2.15 LCD 2x16 25
Gambar 3.1 Diagram Blok Rangkaian Sistem 27
Gambar 3.2 Diagram Blok Sistem Kontrol 29
Gambar 3.3 Rangkaian Power Supplay (PSA) 30
Gambar 3.4 Rangkaian mikrokontroller ATmega8535 31
Gambar 3.5 Rangkaian dalam sensor Efek Hall 32
Gambar 3.6 Rangkaian Skematik dari LCD ke mikrokontroler 33
Gambar 3.7 Modulasi Lebar Pulsa 34
Gambar 3.8 Rangkaian Driver Motor 36
ABSTRAK
PENGENDALI KECEPATAN MOTOR DC MENGGUNAKAN SENSOR HALL BERBASIS MIKROKONTROLER ATMega 8535
ABSTRACT
DC MOTOR SPEED CONTROL USING SENSOR HALL BASED MICROCONTROLLER ATMega 8535
BAB I
PENDAHULUAN
1.1 Latar Belakang
Motor merupakan sebuah perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik. Energi inilah yang digunakan untuk berbagai keperluan, misalnya menggerakkan pompa, menggerakkan kompressor, mengangkat bahan dan lain-lain. Motor juga banyak digunakan untuk keperluan rumah seperti menggerakkan mixer, bor listrik, kipas angin dan sebagainya. Dalam industri motor merupakan suatu hal yang penting, bahkan motor disebut “kuda kerja” nya industri sebab diperkirakan bahwa motor-motor menggunakan sekitar 70% beban listrik total industri. Motor listrik terbagi atas 2 jenis yaitu Motor AC dan Motor DC.
Motor DC merupakan jenis motor yang banyak digunakan di dunia industri, elektronik dan komponen pendukung untuk beberapa peralatan atau instrumenstasi elektronik. Aplikasi industri motor DC yang digunakan dalam industri pada umumnya memiliki kapasitas daya yang relatif dan disesuaikan dengan beban mekanis dan volume produksi. Motor DC atau motor arus searah termasuk dalam kategori jenis motor yang paling banyak digunakan baik dalam lingkungan maupun industri, peralatan rumah tangga hingga mainan anak-anak maupun sebagai piranti pendukung sistem instrumenstasi elektronik
kecepatan sebelumnya dan begitu juga sebaliknya, jika beban yang diberikan berkurang maka kecepatan putaran motor akan bertambah. Sehingga diperlukan operator untuk menambah atau mengurangi tegangan supply ke motor DC sesuai dengan beban yang dikerjakan.
Seiring dengan kemajuan teknologi, permasalahan pada dunia industri tentang ketidakstabilan dari kecepatan motor DC ketika awal penyalaan sangatlah kompleks, sehingga ketika motor DC tersebut bekerja dalam suatu proses yang membutuhkan kecepatan yang konstan, maka sistem tersebut akan terganggu. Pertimbangan penggunaan kontrol dalam dunia industri sangatlah penting, terutama pada pengaturan kecepatan motor. Pengaturan kecepatan motor bisa dilakukan dengan menambah atau mengurangi tegangan supply ke motor DC tersebut, namun akan mengakibatkan pekerjaan yang lebih rumit dan waktu yang lebih lama, karena harus menyeleksi waktu untuk mempercepat atau memperlambat kecepatan motor.
1.2 Rumusan Masalah
1.3 Batasan Masalah
Adapun batasan masalah yang dibahas dalam penelitian ini adalah: 1. Penggunaan Motor DC sebagai alat yang dikendalikan kecepatannya. 2. Menggunakan fitur-fitur mikrokontroler ATMega 8535.
3. Menggunakan sensor efek hall sebagai sensor kecepatan motor.
4. Tidak membahas besar beban yang mempengaruhi kecepatan motor dan kemampuan motor DC yang digunakan.
1.4 Tujuan Penelitian
Adapun maksud dan tujuan penulis melakukan penelitian ini adalah :
1. Merancang suatu alat yang dapat mengontrol kecepatan putaran motor DC. 2. Memanfaatkan sensor efek hall sebagai sensor kecepatan putaran motor.
3. Memanfaatkan mikrokontroler ATMega 8535 dalam memproses putaran motor.
1.5 Manfaat Penelitian
Adapun manfaat yang dapat diambil dari penelitian ini adalah :
1. Sebagai informasi dasar dalam merancang sebuah instrumenstasi yang mampu mengukur dan mengendalikan kecepatan putaran motor listrik.
2. Membuat suatu sistem yang diharapkan berguna untuk keperluan industri yang menggunakan motor.
1.6 Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika pembahasan sebagai berikut :
BAB I. PENDAHULUAN
Dalam bab ini dibahas tentang latar belakang, rumusan masalah, tujuan penelitian, batasan masalah, manfaat serta sistematika penulisan.
BAB II. TINJAUAN PUSTAKA
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan Teori pendukung antara lain tentang motor DC, sensor efek hall, mikrokontroler ATMega 8535, LCD dan kerja dari seluruh peralatan yang digunakan.
BAB III. PERANCANGAN SISTEM
Dalam bagian ini akan dibahas mengenai perancangan dari alat yaitu diagram blok dari rangkaian, skematik dan sistem kerja dari masing-masing rangkaian, bahasa program yang digunakan dan program yang akan diisi ke dalam mikrokontroler ATMega 8535.
BAB IV. PENGUJIAN ALAT DAN PROGRAM
Pada bab ini akan dibahas hasil analisa rangkaian dan sistem kerja alat, dan pengujian alat.
BAB V. KESIMPULAN DAN SARAN
BAB II
TINJAUAN PUSTAKA
2.1 Motor
Motor merupakan perangkat elektromagnetik yang dapat mengubah energi listrik menjadi energi mekanik. Perubahan ini dilakukan dengan merubah tenaga listrik menjadi magnet yang disebut sebagai elektromagnit. Sebagaimana kita ketahui bahwa kutub-kutub dari magnet yang senama akan tolak-menolak dan kutub-kutub tidak senama, tarik-menarik. Maka kita dapat memperoleh gerakan jika kita menempatkan sebuah magnet pada sebuah poros yang dapat berputar, dan magnet yang lain pada suatu kedudukan yang tetap. Dengan cara inilah energi listrik dapat diubah menjadi energi mekanik.
Motor listrik termasuk kedalam kategori mesin listrik dinamis dan merupakan sebuah perangkat elektromagnetik yang mengubah energi listrik menjadi energi mekanik. Energi mekanik ini digunakan untuk, misalnya, memutar impeller pompa, fan atau blower, menggerakan kompresor, mengangkat bahan, dll di industri dan digunakan juga pada peralatan listrik rumah tangga (seperti: mixer, bor listrik, kipas angin). Motor listrik kadangkala disebut “kuda kerja” nya industri, sebab diperkirakan bahwa motor-motor menggunakan sekitar 70% beban listrik total di industri.
Mekanisme kerja untuk seluruh jenis motor listrik secara umum adalah sama, yaitu:
- Arus listrik dalam medan magnet akan memberikan gaya.
- Jika kawat yang membawa arus dibengkokkan menjadi sebuah lingkaran/loop, maka kedua sisi loop, yaitu pada sudut kanan medan magnet, akan mendapatkan gaya pada arah yang berlawanan.
- Motor-motor memiliki beberapa loop pada dinamonya untuk memberikan tenaga putaran yang lebih seragam dan medan magnetnya dihasilkan oleh susunan elektromagnetik yang disebut kumparan medan.
Motor listrik sudah menjadi kebutuhan kita sehari-hari untuk menggerakkan peralatan dan mesin yang membantu perkerjaan. Untuk memutar baling-baling pada kipas angin, digunakan motor listrik. Demikian juga, motor listrik digunakan pada peralatan rumah tangga lainnya seperti: hair dryer, blender, pompa air, mesin cuci, mesin jahit, bor listrik dll. Mesin-mesin pertanian terutama mesin pengolahan hasil pertanian dan mesin-mesin di industri pun banyak yang menggunakan tenaga putarnya dari motor listrik. Secara umum motor listrik dapat dibagi menjadi motor ac dan motor dc, pembagian ini berdasarkan pada arus listrik yang digunakan untuk menggerakkanya.
2.2 Motor DC
Gambar 2.1 Motor DC sederhana
2.2.1 Prinsip dasar dan cara kerja motor DC
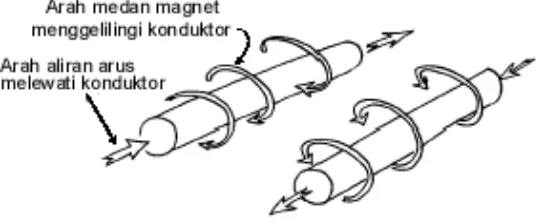
Jika suatu arus lewat pada sebuah konduktor maka akan timbul medan magnet di sekitar konduktor. Arah medan magnet ditentukan oleh arah aliran arus pada konduktor.
Gambar 2.2 Arah Medan Magnet
Gambar 2.3 Medan magnet yang membawa arus mengelilingi konduktor
Pada motor listrik konduktor berbentuk U disebut angker dinamo.
Gambar 2.4 Medan magnet mengelilingi konduktor diantara 2 kutub
Jika konduktor berbentuk U (angker dinamo) diletakkan di antara kutub uatara dan selatan yang kuat medan magnet konduktor akan berinteraksi dengan medan magnet kutub.
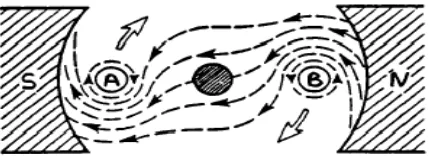
Gambar 2.5 Reaksi garis fluks
Lingkaran bertanda A dan B merupakan ujung konduktor yang dilengkungkan (looped conductor). Arus mengalir masuk melalui ujung A dan keluar melalui ujung B.
berlawanan arah jarum jam akan menambah medan pada kutub dan menimbulkan medan yang kuat di atas konduktor. Konduktor akan berusaha untuk bergerak turun agar keluar dari medan yang kuat tersebut. Gaya-gaya tersebut akan membuat angker dinamo berputar searah jarum jam.
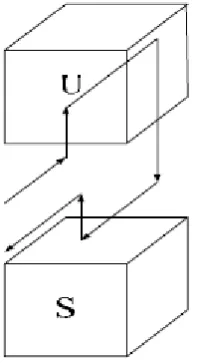
Pada motor dc, daerah kumparan medan yang dialiri arus listrik akan menghasilkan medan magnet yang melingkupi kumparan jangkar dengan arah tertentu. Konversi dari energi listrik menjadi energi mekanik (motor) maupun sebaliknya berlangsung melalui medan magnet, dengan demikian medan magnet disini selain berfungsi sebagai tempat untuk menyimpan energi, sekaligus sebagai tempat berlangsungnya proses perubahan energi, daerah tersebut dapat dilihat pada gambar di bawah ini:
Gambar 2.6 Prinsip kerja motor DC
Agar proses perubahan energi mekanik dapat berlangsung secara sempurna, maka tegangan sumber harus lebih besar daripada tegangan gerak yang disebabkan reaksi lawan. Dengan memberi arus pada kumparan jangkar yang dilindungi oleh medan maka menimbulkan perputaran pada motor.
Dalam memahami sebuah motor, penting untuk mengerti apa yang dimaksud dengan beban motor. Beban dalam hal ini mengacu kepada keluaran tenaga putar / torque sesuai dengan kecepatan yang diperlukan. Beban umumnya dapat
Kecepatan Putaran
T
o
rsi
No load Speed Stall Torsi
Beban torque konstan adalah beban dimana permintaan keluaran energinya bervariasi dengan kecepatan operasinya namun torquenya tidak bervariasi. Contoh beban dengan torque konstan adalah corveyors, rotary kilns, dan pompa displacement konstan.
Beban dengan variabel torque adalah beban dengan torque yang bervariasi dengan kecepatn operasi. Contoh beban dengan variabel torque adalah pompa sentrifugal dan fan (torque bervariasi sebagai kuadrat kecepatan).
Beban dengan energi konstan adalah beban dengan permintaan torque yang berubah dan berbanding terbalik dengan kecepatan. Contoh untuk beban dengan daya konstan adalah peralatan-peralatan mesin.
2.2.2 Karakteristik Motor DC
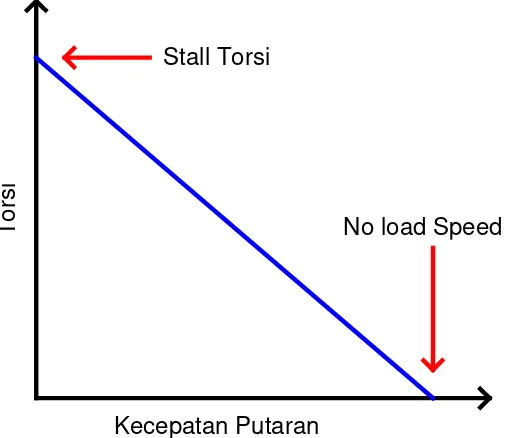
Karakteristik yang dimiliki suatu motor DC dapat digambarkan melalui kurva daya dan kurva torsi/kecepatannya, dari kurva tersebut dapat dianalisa batasan-batasan kerja dari motor serta daerah kerja optimum dari motor tersebut
Dari grafik diatas terlihat hubungan antara torsi dan kecepatan untuk suatu motor dc tertentu. dari grafik terlihat bahwa torsi berbanding terbalik dengan kecepatan putaran, dengan kata lain terdapat tradeoff antara besar torsi yang dihasilkan motor dengan kecepatan putaran motor. Dua karakteristik penting terlihat dari grafik yaitu:
a. Stall torque,(), menunjukkan titik pada grafik dimana torsi maksimum ,tetapi tidak ada putaran pada motor.
b. No load speed,,menunjukkan titik pada grafik dimana terjadi kecepatan putaran maksimum,tetapi tidak ada beban pada motor
2.3 Sensor Efek Hall
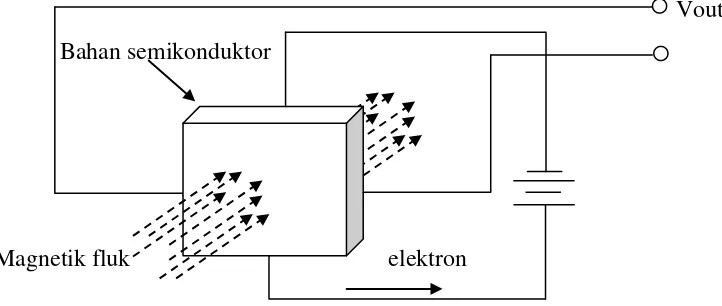
Piranti sensor efek hall (Efek Hall) menghasilkan tegangan keluaran yang ditimbulkan karena medan magnet. Sensor efek hall pertama kali ditemukan pada tahun 1879 oleh Edward H.Hall. Prinsip kerja sensor Hall Effect adalah sebagai berikut. Bila sebuah magnet diletakkan tegak lurus terhadap sepasang keping konduktor, maka tegangan akan muncul pada sisi yang berlawanan dengan konduktor. Tegangan yang muncul ini disebut dengan tegangan Hall. Besar tegangan Hall sebanding dengan arus dan kuat medan magnet. Dengan demikian Efek Hall dapat digunakan untuk mengukur kuat medan magnet.
Vout
Bahan semikonduktor
Magnetik fluk elektron
Gambar 2.8 Tranduser Efek Hall menggunakan sebuah keping semikonduktor
yang sebanding dengan besar arus dan kuat medan magnet. Bila arah medan magnet melewati bahan semikonduktor pada sisi kanan semikonduktor menyebabkan elektron bergerak menyebar kepusat keping. Perubahan gerak elektron menimbulkan tegangan Hall, umumbya sebesarr 10 milivolt. Penerapan sensor efek hall di industri biasanya digunakan untuk mengukur kecepatan putaran obyek yang bergerak. Setiap kali medan magnet melewati sensor, dihasilkan pulsa keluaran keping semikonduktor yang dihubungkan ke sebuah counter yang menghitung berapa kecepatan putaran motor tersebut.
2.4 Mikrokontroler
Mikrokontroler adalah singel chip yang memiliki kemampuan untuk diprogram dan dirancang khusus untuk aplikasi kontrol serta dilengkapi dengan ROM, RAM dan fasilitas I/O pada satu chip. Mikrokontroler merupakan satu hasil dari kemampuan komputasi yang sangat cepat dengan bentuk yang sangat kecil dan harga yang yang murah. Mukrokontroler terus berkembang dengan tujuan untuk memenuhi kebutuhan pasar terhadap alat-alat elektronik dengan perangkat cerdas, cepat sebagai pengontrol dan pemroses data.
2.4.1 Mikrokontroler ATMega 8535
Mikrokontroler AVR (Alf and Vegard’s Risc processor) dari Atmel ini menggunakan arsitektur RISC (Reduced Instruction Set Computer) yang artinya prosesor tersebut memiliki set instruksi program yang lebih sedikit dibandingkan dengan MCS-51 yang menerapkan arsitektur CISC (Complex Instruction Set Computer).
Sekarang ini, AVR dapat dikelompokkan menjadi 6 kelas, yaitu keluarga ATtiny, keluarga AT90Sxx, keluarga ATmega, keluarga AT90CAN, keluarga AT90PWM dan AT86RFxx. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral, dan fungsinya, sedangkan dari segi arsitektur dan instruksi yang digunakan, mereka hampir sama. Sebagai pengendali utama dalam pembuatan alat ini, digunakan salah satu produk ATMEL dari keluarga ATmega yaitu ATmega8535.
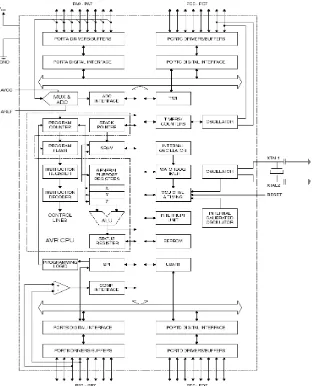
2.4.2 Arsitektur ATMega 8535
Mikrokontroler ATmega8535 memiliki fitur-fitur utama, seperti berikut.
1. Saluran I/O sebanyak 32 buah yaitu Port A, Port B, Port C, dan Port D. 2. ADC 10 bit sebanyak 8 saluran.
3. Tiga unit Timer/Counter dengan kemampuan pembandingan. 4. CPU yang terdiri atas 32 buah register.
5. Watchdog Timer dengan osilator internal. 6. SRAM sebesar 512 byte.
7. Memori Flash sebesar 8 kbytes dengan kemampuan Read While Write. 8. Unit interupsi internal dan eksternal.
9. Port antarmuka SPI.
10.EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 11.Antarmuka komparator analog.
12.Port USART untuk komunikasi serial.
Tedapat empat buah port masing-masing delapan bit dapat difungsikan sebagai masukan maupun keluaran.
Media penyimpan program berupa Flash Memory, sedangkan penympan data berupa SRAM (Static Ramdom Access Memory) dan EEPROM (Electrical Erasable Programmable Read Only Memory). Untuk komunikasi data tersedia fasilitas SPI
(Serial Peripheral Interface), USART (Universal Synchronous and Asynchronous serial Receiver and Transmitter), serta TWI (Two-wire Serial Interface).
Di samping itu terdapat fitur tambahan, antara lain AC (Analog Comparator), 8 kanal 10-bit ADC (Analog to Digital Converter), 3 buah Timer/Counter, WDT (Watchdog Timer), manajemen penghematan daya (Sleep Mode), serta osilator internal 8 MHz. Seluruh fitur terhubung ke bus 8 bit. Unit interupsi menyediakan sumber interupsi hingga 21 macam. Sebuah stack pointer selebar 16 bit dapat digunakan untuk menyimpan data sementara saat interupsi.
Mikrokontroler ATmega8535 dapat dipasang pada frekuensi kerja hingga 16 MHz (maksimal 8MHz untuk versi ATmega8535L). Sumber frekuensi bisa dari luar berupa osilator kristal, atau menggunakan osilator internal.
Keluarga AVR dapat mengeksekusi instruksi dengan cepat karena menggunakan teknik “memegang sambil mengerjakan” (fetch during execution). Dalam satu siklus clock, terdapat dua register independen yang dapat diakses oleh satu instruksi.
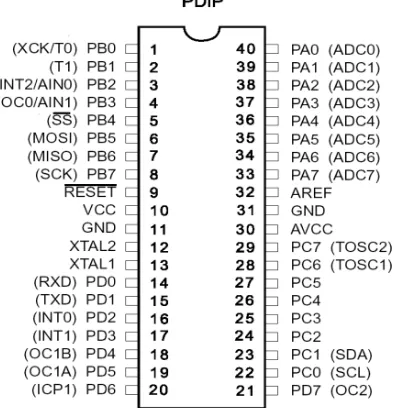
2.4.3 Konfigurasi PIN
Secara umum deskripsi mikrokontroler ATMega 8535 adalah sebagai berikut:
Gambar 2.10 Konfigurasi pin ATMega 8535
VCC (power supply)
GND (ground)
Port A (PA7..PA0)
sink tinggi dan kemampuan sumber. Ketika pinPA0 ke PA7 digunakan sebagai input
dan secara eksternal ditarik rendah, pin – pin akan memungkinkan arus sumber jika resistor internal pull-up diaktifkan. Pin Port A adalah tri-stated manakala suatu kondisi reset menjadi aktif, sekalipun waktu habis.
Port B (PB7..PB0)
Port B adalah suatu Port I/O 8-bit dua arah dengan resistor internalpull-up (yang dipilih untuk beberapa bit). Port B output buffer mempunyai karakteristik gerakan simetris dengan keduanya sink tinggi dan kemampuan sumber. Sebagai input, pin port B yangsecara eksternal ditarik rendah akan arus sumber jika resistor pullup diaktifkan. Pin Port B adalah tri-stated manakala suatu kondisi reset menjadi aktif, sekalipun waktu habis.
Port C (PC7..PC0)
Port C adalah suatu Port I/O 8-bit dua arah dengan resistor internalpull-up (yang dipilih untuk beberapa bit). Port C output buffer mempunyai karakteristik gerakan simetris dengan keduanya sink tinggi dan kemampuan sumber. Sebagai input, pin port C yangsecara eksternal ditarik rendah akan arus sumber jika resistor pullup diaktifkan. Pin Port C adalah tri-stated manakala suatu kondisi reset menjadi aktif, sekalipun waktu habis.
Port D (PD7..PD0)
RESET (Reset input)
XTAL1 (Input Oscillator)
XTAL2 (Output Oscillator) AVCC adalah pin penyedia tegangan untuk port A dan A/D Konverter
AREF adalah pin referensi analog untuk A/D konverter.
2.4.4 Stack Pointer
Stack pointer merupakan suatu bagian dari AVR yang berguna untuk menyimpan data
sementara, variabel lokal, dan alamat kembali dari suatu interupsi ataupun subrutin. Stack pointer diwujudkan sebagai dua unit register, yaitu SPH dan SPL.
Saat awal, SPH dan SPL akan bernilai 0, sehingga perlu diinisialisasi terlebih dahulu. SPH merupakan byte atas (MSB), sedangkan SPL merupakan byte bawah (LSB). Hal ini hanya berlaku untuk AVR dengan kapasitas SRAM lebih dari 256 byte. Bila tidak, maka SPH tidak didefinisikan dan tidak dapat digunakan.
2.4.5 Timer ATMega 8535
AVR ATmega8535 memiliki tiga buah timer, yaitu Timer/Counter0 (8 bit), Timer/Counter1 (16 bit), dan Timer/Counter2 (8 bit).
Timer/Counter 0
Timer/Counter0 adalah Timer/Counter 8 bit yang multifungsi. Fitur-fitur dari
Timer/Counter0 pada ATmega8535 adalah sebagai berikut:
a. Counter 1 kanal.
b. Timer di-nol-kan saat proses pembandingan tercapai (compare match). c. Sebagai pembangkit gelombang PWM.
d. Sebagai pembangkit frekuensi. e. Clock prescaler 10 bit.
Timer/Counter 1
Timer/Counter1 adalah Timer/Counter 16 bit yang memungkinkan programpewaktuan lebih akurat. Fitur-fitur dari Timer/Counter1 ini adalah sebagai berikut.
a. Desain 16 bit, sehingga memungkinkan untuk menghasilkan PWM 16 bit. b. Dua buah unit pembanding.
c. Dua buah register pembanding. d. Satu buah input capture unit.
e. Timer di-nol-kan saat proses pembandingan tercapai (match compare). f. Dapat menghasilkan gelombang PWM.
g. Periode PWM yang dapat diubah-ubah. h. Sebagai pembangkit frekuensi.
i. Empat buah sumber interupsi (TOV1, OCF1A, OCF1B dan ICF1).
Timer/Counter 2
Timer/Counter2 adalah Timer/Counter 8 bit yang multifungsi. Fitur-fitur untuk Timer/Counter2 pada ATmega8535 adalah sebagai berikut.
a. Sebagai counter 1 kanal.
b. Timer di-nol-kan saat proses pembandingan tercapai (match compare). c. Dapat mengahasilkan gelombang PWM.
d. Sebagai pembangkit frekuensi. e. Clock prescaler 10 bit.
f. Sumber interupsi dari compare match (OCF0) dan overflow (TOV0).
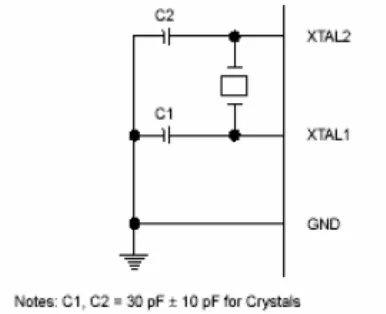
2.4.6 Sistem Clock
clock eksternal maupun clock internal. Untuk clock internal, kita tinggal memasang komponen seperti di bawah ini:
Gambar 2.11 Sistem Clock
2.4.7 Organisasi memori AVR ATMega8535
AVR ATMega8535 memiliki ruang pengalamatan memori data dan memori program yang terpisah. Sebagai tambahan, ATmega8535memiliki fitur suatu EEPROM Memori untuk penyimpanan data. Semuatiga ruang memori adalah reguler dan linier.
A. Memori Data
Tabel 2.1 Konfigurasi Data AVR AT Mega 8535
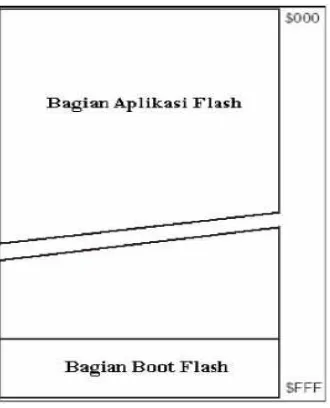
B.Memori Program
Gambar 2.12 Memori Program AT Mega 8535
2.4.8 ADC (Analog To Digital Converter)
ADC pada ATmega8535 merupakan ADC 10-bit tipe Successive Approximation, yang terhubung ke sebuah multiplekser analog yang akan memilih
satu dari delapan kanal. Untuk menjaga validitas data, terdapat untai Sample and Hold. Tegangan suplai ADC terpisah dari tegangan suplai mikrokontroler, tetapi
selisihnya tidak boleh lebih dari 0,3 V. Untuk mengatasinya, digunakan untai filter LC. Terdapat 8 kanal ADC masing-masing selebar 10 bit. ADC dapat digunakan dengan memberikan masukan tegangan pada port ADC, yaitu port A.0 sampai dengan port A.7. Ada dua mode ADC yang dapat digunakan, yaitu single conversion dan free running. Pada mode single conversion, pengguna harus mengaktifkan setiap kali ADC
akan digunakan. Sedangkan pada mode free running, pengguna cukup sekali mengaktifkan, sehingga ADC akan terus mengkonversi tanpa henti.
2.4.9 PWM (Pulse Width Modulation)
Mikrokontroler ATmega8535 menyediakan fitur Timer/Counter1 yang dapat diatur sebagai timer, pencacah (counter), perekam waktu kejadian (even occurance time capture), pembangkit isyarat PWM (Pulse Width Modulation), serta autoreload timer
digunakan secara fleksibel untuk berbagai tujuan yang berkaitan dengan waktu dan pembangkit gelombang. Register-regiser yang terlibat pada operasi Timer/Counter1 antara lain :
a. TCCR1A (Timer/Counter Control Register A) b. TCCR1B (Timer/Counter Control Register B)
c. TCNT1H (Timer/Counter1 High-byte) dan TCNT1L (Timer/Counter1 Low-byte) d. OCR1AH/L (Output Compare Register 1 A High-byte/Low-byte) dan OCR1BH/L
(Output Compare Register 1 B High-byte/Low-byte) e. ICR1H/L (Input Capture Register 1 High-byte/Low-byte) f. TIMSK (Timer/Counter Interrupt Mask Register)
g. TIFR (Timer/Counter Flag Register)
Isyarat PWM merupakan hasil modulasi isyarat segitiga oleh isyarat konstan. Pengubahan amplitudo isyarat konstan akan mengubah lebar pulsa hasil modulasi. Sementara pengubahan amplitudo isyarat segitiga (dengan bentuk segitiga sebangun dengan segitiga awal) akan mengubah frekuensi PWM.
Terdapat dua register OCR1A/B (Output Compare Register1A/B) yang isinya secara kontinyu dibandingkan dengan isi register Timer/Counter1. Register-register ini dapat diisi oleh pengguna, selebar masing-masing 16 bit. Dalam mode PWM, nilai register OCR1A/B ini yang menjadi isyarat pemodulasi.
Lebar register data Timer/Counter1 adalah 16 bit, sehingga dapat mencacah nilai dari $0000 hingga $FFFF. Dalam operasi PWM, nilai Timer/Counter1 ini yang menjadi isyarat segitiga. Sebagai catatan, istilah segitiga di sini tidak berarti segitiga dalam bidang geometri, tetapi isyarat yang meningkat amplitudonya secara berlangkah sehingga bentuknya menyerupai segitiga.
Fasilitas PWM yang disediakan memiliki resolusi 8 hingga 10 bit. Mode operasinya meliputi Fast PWM (FPWM), Phase Correct PWM (PCPWM), dan Phase and Frequency Correct PWM (PFCPWM). Pada mode Fast PWM, Timer/Counter1
akan mencacah ulang dari nol (BOTTOM) setiap kali terjadi limpahan (overflow). Segitiga yang terjadi adalah segitiga siku-siku. Sedangkan pada dua mode yang lain, Timer/Counter1 akan mencacah turun ketika terjadi limpahan, sehingga segitiga
memperbarui OCR1A/B saat nilai TOP, sedangkan pada PFCPWM saat nilai BOTTOM.
Perubahan nilai OCR1A menjadi lebih kecil menunjukkan pulsa yang menyempit pula. Durasi pulsa saat nilai OCR1A lebih besar daripada nilai TCNT1 disebut waktu ON (tON). Sebaliknya, ketika nilai OCR1A lebih kecil, disebut waktu
OFF (tOFF). Perbandingan tON terhadap periode PWM disebut duty cycle, yang nilainya
maksimal 100 %.
Modulasi lebar pulas (PWM) dicapai/diperoleh dengan bantuan sebuah gelombang kotak yang mana siklus kerja (duty cycle) gelombang dapat diubah-ubah untuk mendapatkan sebuah tegangan keluaran yang bervariasi yang merupakan nilai rata-rata dari gelombang tersebut.
Gambar 2.13 Gelombang kotak (pulsa) dengan kondisi high 5V dan low 0V
Ton adalah waktu dimana tegangan keluaran berada pada posisi tinggi
(baca: high atau 1) dan,
Toff adalah waktu dimana tegangan keluaran berada pada posisi rendah
(baca: low atau 0).
Anggap Ttotal adalah waktu satu siklus atau penjumlahan antara Ton dengan Toff , biasa
dikenal dengan istilah “periode satu gelombang”.
Ttotal = Ton + Toff ………. (2.1)
D = T on
off total
T on + T
T on
T =
……… (2.2) Tegangan keluaran dapat bervariasi dengan duty-cycle dan dapat dirumusan sebagai
berikut,
sehingga : ... (2.3)
Dari rumus diatas dapat ditarik kesimpulan bahwa tegangan keluaran dapat diubah-ubah secara langsung dengan mengdiubah-ubah nilai Ton.
Apabila Ton adalah 0, Vout juga akan 0.
Apabila Ton adalah Ttotal maka Vout adalah Vin atau katakanlah nilai maksimumnya.
PWM bekerja sebagai switching power suplai untuk mengontrol on dan off. Tegangan dc dikonvert menjadi sinyal kotak bolak balik, saat on mendekati tegangan puncak dan saat off mrnjadi nol (0) volt. Dengan mengatur duty cycle dari sinyal (modulasi lebar pulsa dari sinyal disebabkan oleh PWM). Terlihat pada gambar di bawah sinyal ref adalah sinyal tegangan dc yang dikonversi oleh sinyal gergaji dan menghasilkan sinyal kotak
Informasi analog dapat dikirimkan dengan menggunakan pulsa-pulsa tegangan atau pulsa arus. Dengan modulasi pulsa, pembawa informasi terdiri dari pulsa-pulsa persegi yang berulang-ulang. Salah satu teknik modulasi yang sering digunakan adalah teknik modulasi durasi atu lebar dari waktu tunda positif ataupun waktu tunda negatif pulsa-pulsa persegi tersebut..
2.5 LCD (Liquid Crystal Display) M1632 2x16
Prinsip kerja LCD adalah mengatur cahaya yang ada, atau nyala LED. Dibandingkan dengan seven segment, memang LCD lebih dianggap rumit oleh sebagian orang, akan tetapi ada pula orang yang lebih suka memakai LCD karena pemakaian daya yang sangat rendah, selain itu juga karena jumlah karakter yang ditampilkan semakin banyak.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
LCD 2 x 16
Gambar 2.15 LCD 2x16
LCD M1632 mempunyai karakteristik sebagai berikut :
1. 16 karakter, dua baris tampilan kristal cair (LCD) dari matriks titik. 2. Duty Ratio : 1/16.
3. ROM pembangkit karakter untuk 192 tipe karakter (bentuk karakter 5 x 7 matriks titik).
4. Mempunyai dua jenis RAM yaitu, RAM pembangkit karakter dan RAM data tampilan.
5. RAM pembangkit karakter untuk 8 tipe karakter program tulis dengan bentuk 5 x 7 matrik titik.
6. RAM data tampilan dengan bentuk 80 x 8 matrik titik (maksimum 80 karakter).
8. Sumber tegangan tunggal +5 Volt.
9. Rangkaian otomatis reset saat daya dinyalakan. 10.Jangkauan suhu pengoperasian 0 sampai 50 derajat.
Schmitt trigger mikrokontroler Sensor Efek Hall
LCD M
Variabel Resistor
Driver Motor BAB III
PERANCANGAN SISTEM
3.1 Perancangan Alat
3.1.1 Diagram Blok Rangkaian
Alat pengontrol kecepatan putaran motor yang dirancang pada penelitian ini berfungsi untuk mempertahankan kecepatan putaran motor (rpm) sesuai dengan nilai rpm yang di input, walaupun motor mendapat beban yang berubah.
Diagram blok dari sistem yang dirancang adalah seperti yang diperlihatkan pada gambar 3.1 dibawah ini :
Dari gambar diagram blok diatas dapat di jelaskan cara kerja rangkaian secara singkat. Untuk menghitung kecepatan putaran motor dc digunakan sensor efek hall. Output sensor dirancang supaya mengeluarkan sinyal digital yang dilewatkan pada rangkaian pengkondisi sinyal. Rangkaian pengkondisi sinyal berguna supaya sinyal tersebut dapat diterima dan diolah dengan baik oleh mikrokontroler.
Pertama kita input nilai adc. Nilai ini adalah nilai yang harus dicapai oleh nilai pengukuran sensor terhadap putaran motor (rpm). Nilai ini diperoleh dengan memutar variabel resistor. Nilai ADC atau kecepatan putaran motor yang diinginkan akan tampil di LCD. Untuk mengerakkan motor sesuai dengan input, maka mikrokontroler akan memberikan lebar pulsa (PWM) secara bertahap sehingga motor akan bergerak. Kemudian sensor efek hall akan mendeteksi kecepatan putaran motor. Pengukuran kecepatan putaran oleh sensor masih dalam kecepatan putaran per detik (rps). Oleh karena itu program pada mikrokontroler akan mengubah rps menjadi kecepatan putaran per menit (rpm). Namun karena hasil deteksi sensor efek hall masih ada pengaruh noise, maka diperlukan rangkaian schmitt trigger sebagai pengkondisi sinyal. Rangkaian ini diperlukan agar masukan yang akan diterima oleh mikrokontroler bebas dari pengaruh noise sehingga pulsa dapat diolah dengan baik. Kecepatan putaran motor hasil pengukuran akan dibandingkan dengan nilai adc oleh mikrokontroler. Jika hasil tidak sama maka mikrokontroler akan melakukan penambahan atau pengurangan lebar pulsa. Kecepatan putaran motor hasil pengukuran akan ditampilkan ke LCD.
Mikrokontroler Driver Motor DC
Sensor Efek Hall +
-Set Point
u(t)
y(t) e(t)
3.1.2 Diagram Blok Sistem Kontrol Alat
Gambar 3.2 Diagram Blok Sistem Kontrol
Dari blok diagram diatas terlihat bahwa sistem control motor bekerja dengan mengumpan balikkan kecepatan yang terbaca oleh sensor dan membandingkan dengan set point motor yang diinginkan. Berdasarkan error antara kecepatan yang di baca oleh sensor dengan set point melalui mikrokontroler akan melakukan perbandingan untuk meminimalisir nilai error sehingga mencapai nilai set point.
3.1.3 Rangkaian Power Supply (PSA)
7805
Gambar 3.3 Rangkaian Power Supplay (PSA)
3.1.4 Rangkaian Mikrokontroller ATMEGA8535
Pada perancangan alat ini akan digunakan mikrokontroller ATMEGA8535 yang berfungsi untuk membaca sinyal dari rpm input dan sensor, menampilkannya pada display LCD dan memberikan lebar pulsa (PWM) untuk menggerakkan motor dc lalu membandingkan antara kecepatan yang di input (rpm referensi) dengan kecepatan hasil pengukuran sensor efek hall. Komponen utama dari rangkaian ini adalah IC mikrokontroler ATMEGA8535. Pada IC inilah semua program diisikan, sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki. Dalam menjalankan chip IC
mikrokontroler ATMEGA8535 memerlukan komponen elektronika pendukung lainnya.
Suatu rangkaian yang paling sederhana dan minim komponen pendukungnya disebut sebagai
suatu rangkaian sistem minimum. Sistem minimum ini berfungsi untuk membuat rangkaian
mikrokontroller dapat bekerja, jika ada komponen yang kurang, maka mikrokontroller tidak
akan bekerja.
(ADC7)PA7 33
ground. Kedua komponen ini berfungsi agar program pada mikrokontroller dijalankan beberapa saat setelah power aktif. Lamanya waktu antara aktifnya power pada IC mikrokontroller dan aktifnya program sebesar perkalian antara kapasitor dan resistor tersebut. Dalam perancangan alat ini, sistem minimum mikrokontroler ATMEGA8535
terdiri dari :
1. Chip IC mikrokontroler ATMEGA8535
2. Kristal 11.0592 MHz
3. Kapasitor
4. Resistor
Rangkaian mikrokontroler ATmega8535 master ditunjukkan pada gambar berikut ini:
3,5 to 20 Volt sensor Vcc
V out
Gnd 3.1.5 Sensor Efek Hall
Prinsip kerja sensor efek hall adalah dengan memanfaatkan medan magnet. Jika magnet diletakkan tegak lurus terhadap sepasang semikonduktor yang diberi tegangan, maka tegangan akan muncul tegangan pada sisi yang berlawanan dengan konduktor. Ini disebabkan karena medan magnet tersebut membelokkan arah pergerakan elekton yang sebelumnya pada konduktor tersebut. Tegangan yang muncul ini disebut dengan tegangan hall. Pada alat ini, sensor efek hall yang dipakai sudah mempunyai penguatan dan pengkondisi sinyal sendiri, sehingga data yang dikirim ke dalam mikrokontroler nantinya sudah dalam bentuk sinyal digital.
Berikut ini adalah rangkaian setara sensor hall. Dalam rangkaian ini, sensor diberi tegangan antara 3,5 - 20 volt untuk membuat sensor ini bekerja. Dalam alat ini, sensor diberi tegangan 5 volt. Ketika sensor mendeteksi medan magnet yang berada pada piringan motor DC, maka nilai resistansi dari variabel resistor akan berubah menjadi sangat kecil, sehingga tegangan tersebut akan menjadi tegangan Vout dari sensor tersebut. Ketika sensor tidak mendeteksi medan magnet, maka resistansi akan sangat besar atau tidak terhingga, sehingga tegangan Vout dari sensor adalah sekitar 0 volt.
1 3.1.6 Rangkaian LCD (Liquid Crystal Display)
LCD (Liquid Crystal Display) adalah modul penampil yang banyak digunakan karena tampilannya menarik. LCD yang paling banyak digunakan saat ini ialah LCD LMB162ABC karena harganya cukup murah. LCD LMB162ABC merupakan modul LCD dengan tampilan 2x16 (2 baris x 16 kolom) dengan konsumsi daya rendah. Modul tersebut dilengkapi dengan mikrokontroler yang didesain khusus untuk mengendalikan LCD. Mikrokontroler HD44780 buatan Hitachi yang berfungsi sebagai pengendali LCD memiliki CGROM (Character Generator Read Only Memory), CGRAM (Character Generator Random Access Memory), dan DDRAM (Display Data Random Access Memory). LCD yang umum, ada yang panjangnya hingga 40 karakter (2x40 dan 4x40), dimana kita menggunakan DDRAM untuk mengatur tempat penyimpanan karakter tersebut.
Tabel 3.1 Peta memori LCD
Gambar berikut menampilkan hubungan antara LCD dengan port mikrokontroler:
A
T f = 1/T
Pada gambar rangkaian di atas pin 1 dihubungkan ke Vcc (5V), pin 2 dan 16 dihubungkan ke Gnd (Ground), pin 3 merupakan pengaturan tegangan Contrast dari LCD, pin 4 merupakan Register Select (RS), pin 5 merupakan R/W (Read/Write), pin 6 merupakan Enable, pin 11-14 merupakan data. Reset, Enable, R/W dan data dihubungkan ke mikrokontroler Atmega8535. Fungsi dari potensiometer (R2) adalah untuk mengatur gelap/terangnya karakter yang ditampilkan pada LCD.
3.1.7 PWM (Pulse Width Modulation/Modulasi Lebar Pulsa)
Modulasi lebar pulsa dapat pula dikatakan sebagai cara memanipulasi lebar sinyal atau tegangan yang dinyatakan dengan pulsa dalam satu perioda. Dengan modulasi pulsa, sinyal informasi diubah menjadi pulsa-pulsa persegi dengan frekuensi dan amplitude tetap tapi dengan lebar pulsa sebanding dengan amplitude sinyal informasi. Salah satu teknik modulasi pulsa yang digunakan adalah teknik modulasi durasi atau lebar waktu tunda positif ataupun tunda negative pulsa-pulsa persegi tersebut.
Gambar 3.7 Modulasi Lebar Pulsa
PWM merupakan suatu metoda untuk mengatur kecepatan perputaran motor dengan cara mengatur presentase lebar pulsa high terhadap perioda dari suatu sinyal persegi dalam bentuk tegangan periodik yang diberikan ke motor sebagai sumber daya. Semakin besar perbandingan lama sinyal high dengan perioda sinyal maka semakin cepat motor berputar.
Dengan metode analog setiap perubahan PWM-nya sangat halus, sedangkan menggunakan metode digital setiap perubahan PWM dipengaruhi oleh resolusi dari PWM itu sendiri. Misalkan PWM digital 8 bit berarti PWM tersebut memiliki resolusi 2 pangkat 8 = 256, maksudnya nilai keluaran PWM inimemiliki 256 variasi, variasinya mulai dari 0 – 255 yang mewakili duty cycle 0 – 100% dari keluaran PWM tersebut. Compare adalah nilai pembanding. Nilai ini merupakan nilai referensi duty cycle dari PWM tersebut. Nilai compare bervariasi sesuai dengan resolusi dari PWM.
Dengan cara mengatur lebar pulsa “on” dan “off” dalam satu perioda gelombang melalui pemberian besar sinyal referensi output dari suatu PWM akan didapat duty cycle yang diinginkan. Duty cycle PWM dapat dinyatakan sebagai berikut :
Duty Cycle = x 100%
Duty cycle 100% berarti sinyal tegangan pengatur motor dilewatkan seluruhnya. Jika tegangan catu 12V, maka motor akan mendapat tegangan 12V. pada duty cycle 50%, tegangan pada motor hanya akan diberikan 50% dari total tegangan yang ada, begitu seterusnya.
Dengan menghitung duty cycle yang diberikan, akan didapat tegangan output yang dihasilkan.
Average Voltage = x Vfull
Average voltage merupakan tegangan output pada motor yang dikontrol oleh sinyal PWM. Nilai a adalah nilai duty cycle saatkondisi sinyal “on”. Nilai b adalah nilai duty cycle saat kondisi sinyal “off”. V full adalah tegangan maximum pada motor. Dengan menggunakan rumus diatas, maka akan didapatkan tegangan output sesuai dengan sinyal kontrol PWM yang dibangkitkan.
3.1.8 Driver Motor
TIP 122
D1 BA157
D2 BA157
R1
C1 12 V
GND microcontroler
motor
sebesar 12 VDC, namun tegangan maksimal yang keluar (Vout) dari mikrokontroler adalah sebesar 5 Volt. Transistor yang digunakan adalah TIP 122. Transistor ini adalah tipe NPN. Agar transistor bisa berfungsi sebagai rangkaian driver maka harus ada tegangan pada basis. Tegangan tersebut berasal dari output mikrokontroler sebesar 5 Volt dalam bentuk pulsa high dan low dimana setiap pulsa high akan membuat transistor TIP 122 menjadi saturasi sehingga motor akan bergerak.
Untuk menentukan tipe transistor yang digunakan, maka harus diketahui arus yang mengalir pada motor DC. Motor ini membutuhkan arus 1A. Maka transistor yang digunakan harus dapat mengalirkan arus 1A pada kolektornya. Pada alat ini digunakan TIP 122.
Gambar 3.8 Rangkaian Driver Motor Arus dari mikrokontroler (ib) = 20mA
Tegangan keluar mikrokontroler (Vin) = 5 Volt Vbe = 0,6 Volt
ib 0,01 A atau 10 mA
Dengan demikian nilai Rb maksimum yang harus digunakan adalah :
Rb 440 Ω
Rb minimum yang dapat digunakan adalah (ib Max = 20 mA)
START
Refferensi = ADC Baca ADC
Nilai ADC > Rpm
Tambah PWM
Kurangi PWM PWM = 0
Baca rps
YA Tidak
END Putar Motor
BAB IV
PENGUJIAN ALAT
Pada bab ini,akan dibahas pengujian alat mulai dari pengujian alat pemodul sampai pengujian alat secara keseluruhan dan hasil pengukuran alat. Pengujian tersebut akan dilakukan secara bertahap dengan urutan sebagai berikut:
4.1 Pengujian Minimum Sistem
4.1.1 Pengujian Sistem Mikrokontroller AVR ATMEGA8535
Pada pengujian rangkaian mikrokontroller dilakukan percobaan yang sifatnya sederhana tapi dapat menunjukkan bekerja tidaknya minimum sistem pada rangkaian tersebut.Percobaan tersebut adalah menghidupkan beberapa buah LED secara bergantian.Percobaan ini dilakukan pada I/O port(port A).Untuk menghidupkan LED tersbut digunakan program sebagai berikut:
while (1) {
// Place your code here PORTA = 240
delay_ms(100); };
}
Jika Program tersebut dijalankan,maka LED akan hidup dan mati secara bergantian seperti yang ditunjukkan oleh tabel sebagai berikut:
Tabel 4.1 Pengujian Mikrokontroler
LED1 LED2 LED3 LED4 LED5 LED6 LED7 LED8
Tahap1 ON OFF ON OFF ON OFF ON OFF
Tahap2 ON OFF ON OFF ON OFF ON OFF
4.1.2 Pengujian LCD
Selain percobaaan uji O/I Port(portA),juga dilakukan pengujian LCD.Pada tahap ini dilakukan percobaan untuk mengaktifkan LCD sistem.Pengaktifkan LCD ini dilakukan dengan cara menampilkan beberapa karakter pada LCD.Untuk menampilkan beberapa karakter tersebut digunakan listing program sebagai berikut:
While(1) {
//Place your code here lcd_gotoxy(4,0);
lcd_putsf(“MOTOR DC”); Delay_ms(30);
Lcd_clear(); };
Jika program di atas dijalankan maka di layar LCD akan tampil “MOTOR DC” pada koordinator x=4 dan y=0. Hal ini menunjukkan bahwa minimum sistem dan LCD dapat berjalan dengan baik.
4.1.3 Pengujian Motor DC
Pengujian ini dilakukan untuk mengetahui bagus atau tidaknya motor yang akan digunakan. Pada rangkaian dapat dilakukan dengan memberi tegangan pada kutub motor DC. Dalam pengujian ini tegangan yang dimasukkan adalah sebesar 12 VDC. Tegangan tersebut adalah tegangan kerja dari motor tersebut. Dari hasil pengujian didapatkan tegangan sebagai berikut:
Tabel 4.2 Pengujian Motor DC
Kutub Perlakuan Keadaan Motor
Positif Diberi tegangan positif
Bergerak searah jarum jam Negatif Diberi tegangan negatif
Positif Diberi tegangan negatif
Bergerak berlawanan arah jarum jam Negatif Diberi tegangan positif
4.1.4 Pengujian Sensor
Pengujian dilakukan dengan mengukur tegangan keluaran dari sensor ketika sensor mendeteksi dan tidak mendeteksi medan magnet.
Tabel 4.3 Pengujian Sensor
Perlakuan Tegangan Pada Output Sensor
Medan magnet terdeteksi 4.97 Volt
4.1.5 Pengujian ADC (Analog to Digital Converter)
Pengujian ini bertujuan untuk pengambilan data dari ADC dan mencoba ketelitian ADC tersebut untuk mengkonversi data analog dan digital. Pengujian ini dilakukan dengan cara memberi masukan pada ADC internal mikrokontroler ATMega 8535 pada chanel 0 berupa tegangan analog dengan nilai maksimal sama dengan Vcc yaitu sebesar 5 Volt DC. Resolusi ADC ini adalah 8 bit sehingga total level yang dibangkitkan adalah 28 = 256 level. Mikrokontroler ini sebagai pengolah data masukan tegangan ADC yang masuk ke port A. Tegangan yang masuk ke port A kemudian diubah menjadi data data digital oleh ADC yang sudah terintegrasi di dalam mikrokontroler. Tegangan yang keluar dari potensiometer ini tidak berfungsi untuk menyediakan lebar pulsa tetapi untuk menampilkan nilai yang harus disesuaikan oleh pengukuran sensor.
Tabel 4.4 Hubungan ADC dengan Tegangan Variabel Resistor
No
Tegangan Input
Nilai ADC
1 0.00 0.00
2 0.50 25
3 1.00 50
4 1.50 76
5 2.00 102
6 2.50 128
7 3.00 151
9 4.00 204
10 4.50 227
11 5.00 255
4.2 Hasil Pengukuran Alat
4.2.1 Hasil Pengukuran Kecepatan Putar (rpm)
Untuk menguji ketelitian alat ini maka dilakukanlah pengujian hasil
pengukuran kecepatan putaran motor pada alat dan dibandingkan dengan nilai hasil pengukuran oleh multimeter. Nilai kecepatan dari multimeter dapat diperoleh dengan cara menghubungkan langsung tegangan keluar dari sensor dengan multimeter digital. Multimeter digital diatur fungsinya dalam hertz meter, sehingga apabila motor
berputar maka sensor akan menghasilkan pulsa yang frekuensinya terbaca langsung oleh multimeter. Dalam penelitian ini ketika piringan bergerak 1 putaran penuh, akan menghasilkan 100 pulsa. Jadi kecepatan putaran motor dalam satuan rps adalah :
Kecepatan motor (rps) = Jumlah frekuensi(yang terbaca multimeter) /jumlah pulsa 1 putaran
Kecepatan motor (rps) = Jumlah frekuensi(yang terbaca multimeter)/ 100
1 rps = 60 rpm, maka :
Kecepatan motor (rpm) = 60 x frekuensi pulsa(yang terbaca multimeter)/ 100
Tabel 4.5 Pengukuran kecepatan putaran tanpa beban
Nilai ADC rpm display
rpm Multimeter
pwm (millisecond)
100 101 100 120
110 111 109 124
120 122 121 126
130 129 129 127
140 142 141 130
150 152 151 136
160 160 161 143
170 170 171 144
180 181 180 146
190 191 192 147
200 202 201 148
210 213 212 151
220 219 219 154
230 232 231 157
Tabel 4.6 Pengukuran kecepatan putar dengan beban
Nilai ADC rpm Display
rpm Multimeter
pwm (millisecond)
100 102 101 320
110 109 109 323
120 119 120 325
130 130 131 327
140 142 141 328
150 150 151 336
160 161 159 346
170 169 171 351
180 181 180 355
190 191 192 360
200 202 201 366
210 212 211 372
220 219 220 383
230 231 230 392
Tabel 4.7 Pengukuran kecepatan putar setelah beban dilepas
Nilai ADC rpm display
rpm multimeter
pwm (millisecond)
100 102 101 122
110 109 110 124
120 121 121 127
130 132 131 128
140 141 141 130
150 151 151 134
160 161 161 136
170 168 169 137
180 182 181 140
190 190 191 142
200 199 200 142
210 209 210 144
220 223 222 147
230 232 231 147
4.2.2 Analisa Ketelitian Alat
Untuk mengetahui tingkat ketelitian dari alat yang dirancang, maka dilakukan perbandingan antara rpm yang diukur multimeter dengan kecepatan putaran yang dideteksi sensor (rpm display). Untuk mendapatkan persen kesalahan maka digunakan persamaan :
x 100%...(4.1)
Selain % kesalahan, penyimpangan juga digunakan dalam analisa ketelitian alat yaitu antara kecepatan yang di ukur multimeter dengan kecepatan yang dideteksi sensor (rpm display). Besar penyimpangan (d) dapat dicari dengan cara berikut.
Penyimpangan (d) = rpm multimeter – rpm display...(4.2) Berdasarkan cara yang sama, maka hasil kesalahan dan penyimpangan pada pengukuran kecepatan putaran motor dapat dilihat pada tabel berikut ini.
Tabel 4.8 Kesalahan dan penyimpangan pengukuran kecepatan tanpa beban rpm
multimeter
rpm display % kesalahan penyimpangan (d)
100 101 1,00% 1
109 111 1,83% 2
121 122 0,82% 1
129 129 0 % 0
141 142 0.71% 1
151 152 0,66% 1
161 160 0,00% 0
180 181 0,55% 1
192 191 0,52% 1
201 202 0,49% 1
212 213 0,47% 1
219 219 0 % 0
231 232 0,43% 0
240 241 0,42% 1
Tabel 4.9 Kesalahan pengukuran kecepatan putaran dengan beban rpm
multimeter
rpm display % kesalahan penyimpangan (d)
101 102 0,99% 1
109 109 0% 0
120 119 0,83% 1
131 130 0,76% 1
141 142 0,71% 0
151 150 0,66% 1
159 161 1,27% 2
171 169 1,16% 2
180 181 0,56% 1
192 191 0,52% 1
211 212 0,47% 1
220 219 0,45% 1
230 231 0,43% 1
242 241 0,70% 1
Tabel 4.10 Kesalahan dan penyimpangan pengukuran kecepatan putaran setelah beban dilepas
rpm multimeter
rpm display % kesalahan penyimpangan (d)
101 102 0,99% 1
110 109 0,90% 1
121 121 0 % 0
131 132 0,76% 1
141 141 0 % 0
151 151 0 % 0
161 161 0 % 0
169 168 0,59% 1
181 182 0,55% 1
191 190 0,52% 1
200 199 0,50% 1
210 209 0,47% 1
231 232 0,43% 1
241 242 0,41% 1
Perhitungan diatas menunjukkan bahwa terdapat % kesalahan dan penyimpangan antara kecepatan putaran yang di input (Nilai ADC) dengan kecepatan putaran yang dideteksi sensor dari alat yang di rancang, hal tersebut kemungkinan disebabkan oleh :
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil penelitian ini maka dapat ditarik kesimpulan sebagai berikut :
1. Pengendali kecepatan motor DC telah berhasil dirancang dengan kecepatannya dikontrol dengan teknik PWM, dimana lebar pulsa high dan low nya bisa dimodulasi sehingga kecepatan putaran (rpm) yang diinputkan bisa dipertahankan.
2. Sensor efek hall dapat digunakan sebagai sensor kecepatan putaran motor. 3. Mikrokontroler ATmega 8535 dapat digunakan dalam banyak pengontrolan
termasuk untuk memproses kecepatan motor DC.
5.2 Saran
1. Penggunaan mikrokontroler ATmega 8535 dan sensor efek hall diharapkan nantinya lebih efisien dan multifungsi (canggih) sesuai dengan perkembangan zaman.
DAFTAR PUSTAKA
Bejo, Agus. 2007. C&AVR ’’Rahasia Kemudahan Bahasa C Dalam Mikrokontroler ATMega8535’’. Yogyakarta: Graha Ilmu.
Budiharto, Widodo. 2006. Belajar Sendiri Membuat Robot Cerdas. Bekasi: Elex Media Komputindo.
Hartono, Puji. 2008. Analisis Pengendali Motor DC Menggunakan Metoda Logika
Fuzzy Dengan Pencatudayaan PWM. Bandung : ITB
Heryanto, Ari M. & Wisnu Adi. 2008. Pemrograman Bahasa C Untuk Mikrokontroler ATMega8535. Yogyakarta: Penerbit Andi.
Pitowarno,E. 2005. Mikroprosessor & Interfacing. Yogyakarta: Penerbit Andi.
Malvino, A.P, 1996. Prinsip-prinsip Elektronika (terjemahan Hanapi Guanawan). Jakarta: Erlangga.
Wardana, Lingga. 2006. Belajar Sendiri Mikrokontroler AVR Seri ATMega8535, Simulasi Hardware Dan Aplikasi. Yogyakarta: Penerbit Andi.
Winoto, Ardi. 2008. Mikrokontroler AVR ATMega8/32/16/8535 Dan Pemrogramannya Dengan Bahasa C Pada WinAVR. Cirebon: Penerbit Informatika.
http://www.atmel.com
LAMPIRAN B
PROGRAM DI MIKROKONTROLER ATMEGA 8535
/***************************************************** This program was produced by the
CodeWizardAVR V1.25.8 Standard Automatic Program Generator
© Copyright 1998-2007 Pavel Haiduc, HP InfoTech s.r.l. http://www.hpinfotech.com
int a, pwm, nilai, temp, pulsa; char data[16];
// Alphanumeric LCD Module functions #asm
.equ __lcd_port=0x15 ;PORTC #endasm
#include <lcd.h> #include <stdio.h>
// External Interrupt 0 service routine
{
// Place your code here frekuensi++;
}
// Timer 0 overflow interrupt service routine interrupt [TIM0_OVF] void timer0_ovf_isr(void) {
// Timer 1 overflow interrupt service routine interrupt [TIM1_OVF] void timer1_ovf_isr(void) {
// Reinitialize Timer 1 value TCNT1H=0xD5D0 >> 8;
TCNT1L=0xD5D0 & 0xff; pulsa=frekuensi;
pulsa=pulsa*60/100;
if(pulsa<=-0.01) {pulsa=pulsa*-1;} frekuensi=0;
// ADC interrupt service routine // with auto input scanning
interrupt [ADC_INT] void adc_isr(void) {
register static unsigned char input_index=0; // Read the AD conversion result
adc_data[input_index]=ADCW; // Select next ADC input
if (++input_index > (LAST_ADC_INPUT-FIRST_ADC_INPUT)) input_index=0;
ADMUX=(FIRST_ADC_INPUT | (ADC_VREF_TYPE & 0xff))+input_index;
delay_us(10);
// Start the AD conversion ADCSRA|=0x40;
}
// Declare your global variables here
void main(void) {
// Declare your local variables here
// Input/Output Ports initialization // Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTA=0x00; DDRA=0x00;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=Out Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=0 State1=T State0=T
PORTB=0x00; DDRB=0x08;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTC=0x00; DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTD=0x00; DDRD=0x00;
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: 11059,200 kHz // Mode: Normal top=FFh
TCNT0=0x00; OCR0=0x00;
// Timer/Counter 1 initialization // Clock source: System Clock // Clock value: 10,800 kHz // Mode: Normal top=FFFFh // OC1A output: Discon. // OC1B output: Discon. // Noise Canceler: Off
// Input Capture on Falling Edge // Timer 1 Overflow Interrupt: On // Input Capture Interrupt: Off // Compare A Match Interrupt: Off // Compare B Match Interrupt: Off TCCR1A=0x00;
// Timer/Counter 2 initialization // Clock source: System Clock // Clock value: Timer 2 Stopped // Mode: Normal top=FFh
// OC2 output: Disconnected ASSR=0x00;
TCCR2=0x00; TCNT2=0x00; OCR2=0x00;
// External Interrupt(s) initialization // INT0: On
// INT0 Mode: Falling Edge // INT1: Off
// Timer(s)/Counter(s) Interrupt(s) initialization TIMSK=0x05;
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80; SFIOR=0x00;
// ADC initialization
// ADC Clock frequency: 691,200 kHz // ADC Voltage Reference: AVCC pin // ADC High Speed Mode: Off
// ADC Auto Trigger Source: None
ADMUX=FIRST_ADC_INPUT | (ADC_VREF_TYPE & 0xff); ADCSRA=0xCC;
SFIOR&=0xEF;
// LCD module initialization lcd_init(16);
if(temp<=49 && temp>=2) {pwm=pwm-1;} }
sprintf(data,"%d",pwm); lcd_gotoxy(12,0);
lcd_puts(data); delay_ms(500); lcd_clear(); };
LAMPIRAN FOTO ALAT