SISTEM INFORMASI GEOGRAFIS
POTENSI KOTA BANJAR
SKRIPSI
Diajukan untuk Menempuh Ujian Akhir Sarjana
NAMA MAHASISWA
10101010
PROGRAM STUDI TEKNIK INFORMATIKA
FAKULTAS TEKNIK DAN ILMU KOMPUTER
DAFTAR ISI
ABSTRAK ... i
ABSTRACTS
... ii
KATA PENGANTAR ... iii
DAFTAR TABEL ... ix
DAFTAR GAMBAR ... x
DAFTAR SIMBOL ... xii
BAB 1 PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2
Rumusan Masalah ... 3
1.3
Maksud dan Tujuan ... 3
1.3.1 Maksud ... 3
1.3.2 Tujuan ... 3
1.4
Batasan Masalah ... 4
1.5
Metodologi Penelitian ... 5
1.5.1
Metode Pengumpulan Data ... 5
1.5.2
Pembangunan Perangkat Lunak ... 6
1.6 Sistematika Penulisan ... 7
BAB 2 LANDASAN TEORI ... 9
2.1 Pengertian Lalu Lintas ... 9
2.2 Rambu Lalu Lintas Larangan ... 9
2.3 Pengolahan Citra Digital ... 10
2.3.1 Jenis Citra ... 11
vi
2.3.3 Karakteristik Citra Digital ... 14
2.3.4 Tipe Citra Digital ... 15
2.3.5 Citra Grayscale ... 18
2.3.6 Deteksi Tepi (
Edge
Detection
) ... 18
2.3.7 Normalisasi ... 21
2.4 Pengenalan Pola ... 22
2.5
Gabor Filter
... 23
2.6
Hidden Markov Model
(HMM) ... 25
2.6.1 Penggunaan HMM ... 26
2.6.2 Probabilitas Barisan (Sequence) yang Teramati ... 26
2.6.3
Step by Step
HMM ... 27
2.7
OOP (
Object Oriented Programming
) ... 32
2.7.1 Konsep Dasar OOP ... 32
2.7.2 Analisis Berorientasi Objek ... 35
2.7.3 Desain Beroroentasi Objek ... 35
2.7.4 Pemodelan ... 35
2.8 UML ... 36
2.8.1 Analisis dan desain Berorientasi Objek (OOAD) ... 36
2.8.2 Komponen UML ... 37
2.9
Use Case Diagram
... 38
2.9.1
Actor
... 38
2.10
Sequence Diagram
... 38
2.11
Class Diagram
... 39
BAB 3 ANALISIS DAN PERANCANGAN ... 41
3.2
Analisis Aplikasi ... 41
3.2.1
Gambaran Umum Aplikasi ... 42
3.3 Analisis Data Masukan ... 43
3.4
Analisis Metode ... 45
3.4.1
Preprocessing
... 45
3.4.2
Ekstraksi Ciri ... 54
3.4.3
Klasifikasi HMM ... 54
3. 5 Analisis Kebutuhan Non Fungsional ... 59
3.5.1 Analisis Perangkat Keras ... 59
3.5.2 Analisis Perangkat Lunak ... 60
3.6
Analisis Kebutuhan Fungsional ... 60
3.6.1
Use Case Diagram
... 60
3.6.2
Use Case Identification
... 61
3.6.3
Use Case Scenario
... 62
3.6.4
Activity Diagram
... 66
3.6.5
Sequence Diagram
... 68
3.6.6
Class Diagram
... 69
3.7
Struktur Menu ... 70
3.8
Perancangan Antarmuka ... 71
3.9
Jaringan Semantik ... 74
BAB 4 IMPLEMENTASI DAN PENGUJIAN APLIKASI ... 75
4.1 Implementasi Aplikasi ... 75
4.1.1 Implementasi Perangkat Keras ... 75
4.1.2 Implementasi Perangkat Lunak ... 76
viii
4.2.
Pengujian Metode ... 84
4.2.1 Rencana Pengujian ... 84
4.2.2 Skenario Pengujian... 84
4.2.3
Pengujian Data Masukan... 88
4.3 Pengujian Aplikasi ... 89
4.3.1 Pengujian
Black Box
... 90
4.3.2 Pengujian Performansi ... 93
BAB 5 KESIMPULAN DAN SARAN ... 99
5.1 Kesimpulan ... 99
5.2 Saran ... 99
DAFTAR PUSTAKA ... 101
LAMPIRAN A
ANTAR MUKA APLIKASI... A-1
LAMPIRAN B
LISTING PROGRAM...
B-1
LAMPIRAN C
SURAT HAK EKSKLUSIF... C-1
LAMPIRAN D
DAFTAR PUSTAKA
[1]
Website Resmi Korps Lalu Lintas POLRI. 2015. http://lantas.polri.go.id.
[2]
Website
Resmi
Pemerintahan
Jawa
Barat.
2015.
http://www.jabarprov.go.id.
[3]
D Sudian, Arman dan P Priambodo. “Aplikasi Pengenalan Wajah (
Face
Recognition
) Menggunakan Metode Hidden Markov Model (HMM)”.
Teknik Elektro, UI.
[4]
E Yuwitaning, B Hidayat dan N Andini.
“Implementasi Metode Hidden
Markov Model Untuk Deteksi Tulisan Tangan”. Teknik Elektro, Universitas
Telkom.
[5]
H Kekre and V Bharadi. 2010. “
Gabor Filter Based Feature Vector for
Dynamic Signature Recognition.
”.
[6]
D Murugan, S Arumugam, K Rajalakshmi dan Manish. 2010. “
Performance
Evaluation of Face Recognition Using Gabor Filter, Log Gabor Filter and
Disctere Wavelet Transform
”.
[7]
Sepritahara. 2012.
“Aplikasi Pengenalan Wajah (
Face Recognition
)
Menggunakan Metode Hidden Markov Model (HMM)”. Skripsi. Jakarta:
Fakultas Teknik, Universitas Indonesia.
[8]
A Margono, I Gunawan dan R Lim. 2004.
“Pelacakan dan Pengenalan
Wajah Menggunakan Metode Embedded Hidden Markov Models”.
102
[10] P Dymarski. 2011.
“
Hidden Markov Model, Theory and Aplications
”
. India:
InTech.
[11] A Khandual, G Baciu
and
N Rout. 2013.
“
Colorimetric Preprocessing o
f Digital Colour Image
”.
[12]
Gabor
Filter
Imaging
Filter.
2015.
http://accord-framework.net/docs/html/T_Accord_Imaging_Filters_GaborFilter.htm.
[13]
Canny
Edge
Detector
Class.
2015
.
http://www.aforgenet.com/framework/docs/html/e08cae30-7a37-db9f-cede-05cf6521343f.htm.
[14]
P Mishra, R Chatterjee
and
V Mahapatra. 2010. “
Texture Gabor Filter Using
IMPLEMENTASI METODE
HIDDEN MARKOV MODEL
DAN
GABOR
FILTER
UNTUK MENDETEKSI PELANGGARAN LALU LINTAS
KENDARAAN
Kukuh Setiawan
Teknik Informatika – Universitas Komputer Indonesia Jl. Dipatiukur 112-114 Bandung
Email : [email protected]
ABSTRAK
Jumlah pelanggaran lalu lintas kendaraan dari tahun ke tahun semakin meningkat. Hal itu diketahui dari data analisa dan evaluasi pelanggaran lalu lintas 2015, terdapat kenaikan jumlah pelanggaran lalu lintas yang dilakukan pengendara jika dibandingkan dengan periode di tahun 2014. Kemudian kaitannya dengan penelitian ini, yaitu mengenali jenis pelanggaran tersebut dengan cara mengimplementasikan metode Hidden Markov Model dan Gabor Filter dalam pengolahan citra berdasarkan masalah yang dipaparkan. Hal yang perlu diperhatikan dalam mengetahui pelanggaran tersebut yaitu mengklasifikasikan citra pelanggaran berdasarkan rambu di sekitar kendaraan. Dan dalam batasan masalah yang diamati penelitian fokus kepada rambu dilarang “Perboden” dan dilarang “balik arah”. Sehingga pelanggaran itulah yang dijadikan penelitian menggunakan metode untuk dapat menghasilkan kesimpulan jenis pelanggaran. Ketika menjumpai rambu dengan pola seperti dilarang “Perboden” dan dilarang “balik arah”, maka pelanggaran dapat dideteksi dari klasifikasi ekstraksi ciri pada saat melakukan tahapan preprocessing citra. Kemudian metode yang digunakan untuk mendeteksi citra pelanggaran ini yaitu Hidden Markov Model dalam proses pengklasifikasian citra dan Gabor Filter sebagai salah satu cara preprocessing citra. Dengan mengimplementasikan metode tersebut dimaksudkan akan mampu memenuhi kebutuhan mendeteksi pelanggaran yang dilakukan oleh kendaraan. Hasil dari penelitian ini berupa data klasifikasi training yang digunakan untuk mendeteksi data testing, dan menghasilkan output jenis pelanggaran yang dimaksudkan. Dan dari pengujian K-Fold Cross Validation menggunakan 82 data didapatkan nilai akurasi rata-rata 70,31% benar dalam klasifikasi dan 29.69% salah.
Kata kunci :
Gabor Filter, Hidden Markov Model, image processing, klasifikasi citra, pelanggaran kendaraan.
1. PENDAHULUAN
Peraturan lalu lintas dibuat untuk kepentingan umum dengan tujuan supaya tercipta ketertiban dalam berkendara, karena dengan aturan yang dipatuhi maka akan tercipta suasana nyaman saat menggunakan fasilitas lalu lintas. Namun masih saja terdapat pihak yang melakukan pelanggaran, dan jumlah pelanggaran lalu lintas kendaraan dari tahun ke tahun semakin meningkat. Hal itu diketahui dari data analisa dan evaluasi pelanggaran lalu lintas 2015, terdapat kenaikan jumlah pelanggaran lalu lintas yang dilakukan pengendara jika dibandingkan dengan periode di tahun 2014.[1] Dan di Kota Bandung pada satu pekan saja terdapat rata-rata 1200 berkas perkara pelanggaran lalu lintas yang disidangkan.[2]
Dalam kaitannya tentang penelitian ini, yaitu mendeteksi pengolahan citra pelanggaran kendaraan yang akan dijadikan kajian untuk menentukan jenis pelanggaran yang terjadi berdasarkan masalah yang dipaparkan. Hal yang perlu diperhatikan dalam mengetahui pelanggaran yaitu obyek kendaraan dan simbol rambu di sekitarnya. Pelanggaran itulah yang akan dijadikan penelitian menggunakan metode untuk dapat menghasilkan kesimpulan jenis pelanggaran. Ketika menjumpai rambu dengan pola seperti dilarang “Perboden” atau dilarang “balik arah” maka pelanggaran dapat dideteksi dengan menggunakan pengenalan pola. Metode yang digunakan untuk mendeteksi citra pelanggaran ini yaitu Hidden Markov Model sebagai klasifikasi citra dan gabor filter sebagai salah satu preprocessing citra, dengan mengimplementasikan metode tersebut dimaksudkan agar mampu memenuhi kebutuhan mendeteksi pelanggaran yang dilakukan oleh kendaraan.
Jurnal Ilmiah Komputer dan Informatika (KOMPUTA)
2
Edisi...Volume..., Bulan 20..ISSN :2089-9033
lain yang tidak sesuai dalam database nilai dari deteksi tepi citra training dengan state yang ditentukan, sehingga akan mendeteksi pelanggaran yang dimaksud. [3]
Kemudian dijelaskan bahwa Hidden Markov Model (HMM) merupakan suatu model probabilitas yang menggambarkan hubungan statistik antara urutan observasi dan urutan state yang tidak diobservasi “hidden” atau disembunyikan.[4] Dalam HMM, keadaan tidak terlihat secara langsung, tetapi outputnya yang tergantung terhadap keadaan tersebut terlihat yaitu dalam kasus ini merupakan matriks dari hasil ekstraksi. Dan untuk membuat klasifikasi citra, perlu adanya tahapan Preprocessing terlebih dahulu yang memungkinkan me-switch kondisi dimana jika data citra asli ataupun noise tetap bisa dilakukan pengujian. Dan pada penelitian sebelumnya pendeteksian noise pada karakter seperti pada pengenalan pola tanda tangan HMM hanya memiliki rata-rata CER 43,35% yaitu dengan penjelasan semakin kecil CER (Character Error Rate) semakin baik akurasi yang dihasilkan, sementara dalam pengenalan huruf dan angka tulisan tangan mencapai akurasi 74%. Itu artinya pengenalan yang dihasilkan lebih baik dibandingkan dengan preprocessing.[4] Pada akhirnya untuk membantu dalam menyempurnakan kelemahan HMM tersebut maka perlu adanya metode lain yang mangkus dalam preprocessing citra tersebut sebelum melakukan tahapan pengklasifikasian citra.
Mengenai Gabor Filter merupakan metode dengan pengenalan obyek yang dapat didefinisikan sebagai proses penentuan identifikasi obyek. Metode ini dapat mendeteksi setiap titik-titik yang dihasilkan dengan akurasi tinggi[5][6] Citra sebelum masuk ke dalam basis data, citra akan lebih dahulu diolah menggunakan metode preprocessing dan salah satunya yaitu Gabor FIlter. Perhitungan konvolusi Gabor Filter akan menghasilkan nilai tertentu yang disebut dengan gabor jet response sampai mencapai thresholding.
Maka diperlukan kedua metode dengan fungsionalitas yang berbeda yaitu gabor filter untuk menyempurnakan tahapan preprocessing dan HMM untuk menghasilkan klasifikasi.
1.1 Gabor Filter
Sebagai filter digunakan Gabor Filter kernel 2D yang diperoleh dengan memodulasi gelombang sinus 2D pada frekuensi dan orientasi tertentu dengan Gaussian envelope. Persamaan dasar fungsi Gabor Filter kernel 2D ditunjukkan persamaan pada pada rumus berikut :
(1)
Kemudian x dan y adalah standar deviasi dari
Gaussian envelope pada dimensi x dan y. dan n adalah panjang gelombang dan orientasi dari gelombang sinus 2-D. Penyebaran dari Gaussian envelope didefinisikan dalam bentuk dari gelombang sinus . Rotasi dari x – y sebesar sudut n
menghasilkan Gabor filter pada orientasi n.
Berikut merupakan rumus persamaan menghitung standar deviasi :
(2)
Default parameter yang digunakan untuk menghitung gabor filter dapat diketahui pada dokumentasi accord library.[12]
Orientation ͠θn = 0.6
Gaussian Variance Sigma = 2
Aspect Ratio Gamma = 0.3
Kernel Size fx=3
Panjang gelombang = 4
Adapun dalam menghitung hasil akhir nilai gabor dapat dilakukan pada persamaan rumus (3):
(3)
Jika semua Gabor filter dengan variasi panjang gelombang () dan orientasi (n) diterapkan pada
satu titik tertentu (x,y), maka didapatkan banyak respon filter untuk titik tersebut, misal: digunakan empat panjang gelombang ( = 3, 5, 7, 10) dan delapan orientasi, maka akan dihasilkan tiga puluh dua respon filter untuk tiap titik citra yang dikonvolusikan dengan filter tersebut.
1.2 Hidden Markov Model
adalah menentukan parameter-parameter tersembunyi (state) dari parameter-parameter yang dapat diamati (observer). Parameter-parameter yang ditentukan kemudian dapat digunakan untuk analisis yang lebih jauh, misalnya untuk aplikasi pengenalan pola (Pattern Recognition). Sebuah HMM dapat dianggap sebagai sebuah Bayesian Network dinamis yang paling sederhana.
[image:10.595.355.528.248.361.2]Pada model Markov umum (Vanilla/Visible Markov Model), state-nya langsung dapat diamati, oleh karena itu probabilitas transisi keadaan (state) menjadi satu-satunya parameter. Di dalam Model Markov yang tersembunyi, state-nya tidak dapat diamati secara langsung, akan tetapi yang dapat diamati adalah variabel-variabel yang terpengaruh oleh state. Setiap state memiliki distribusi probabilitas atas token-token output yang mungkin muncul. Oleh karena itu rangkaian token yang dihasilkan oleh HMM memberikan sebagian informasi tentang sekuens state-state.[4]
Gambar 1 HMM Model
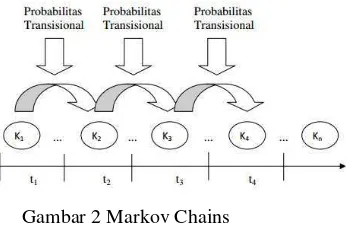
1.2.1 Markov Chain
Rantai Markov (Markov Chains) adalah merupakan suatu teknik matematika yang biasa digunakan untuk melakukan pemodelan (modeling) berbagai macam sistem dan proses bisnis. Teknik ini dapat digunakan untuk memperkirakan perubahan-perubahan di waktu yang akan datang dalam variabel-variabel dinamis atas dasar perubahan-perubahan dari variabel-variabel dinamis tersebut di waktu yang lalau. Teknik ini dapat digunakan juga untuk menganalisis kejadian-kejadian di waktu-waktu mendatang secara matematis.
Model Rantai Markov (Markov Chains) ditemukan oleh seorang ahli Rusia yang bernama Andrey Markov pada tahun 1906, yaitu: “Untuk setiap waktu t, ketika kejadian adalah �� dan seluruh kejadian sebelumnya adalah �� ... , �� −� yang terjadi dari proses yang diketahui, probabilitas seluruh kejadian yang akan datang Kt(j) hanya bergantung pada kejadian �� − dan tidak bergantung pada kejadian-kejadian sebelumnya yaitu �� − , �� − ,..., �� −�.”.
Rantai Markov (Markov Chains) apabia diberikan inputan keadaan dari keadaan saat ini, keadaan akan datang dapat diprediksi dan dapat di lepas dari keadaan di masa lampau. Artinya, deskripsi kondisi saat ini menangkap semua informasi yang
mempengaruhi evolusi dari suatu sistem dimasa depan. Dengan kata lain, kondisi masa depan dituju dengan menggunakan prbabilitas bukan dengan determinitas.
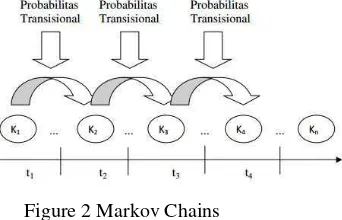
Gambaran mengenai rantai Markov ini kemudian gerakan-gerakan dari beberapa variabel di masa yang akan datang bisa diprediksi berdasarkan gerakan-gerakan variabel tersebut pada masa lalu. �� dipengaruhi oleh kejadian �� , �� dipengaruhi
oleh kejadian �� dan demikian seterusnya dimana perubahan ini terjadi karena peranan probabilitas transisi (transition probability). Kejadian �� misalnya, tidak akan mempengaruhi kejadian �� .
Gambar 2 Markov Chains
Rantai Markov (Markov Chains) bermanfaat untuk menghitung probabilitas suatu kejadian teramati yang secra umum dapat dirumuskan sebagai berikut: � = ��|��− , ��− , ��− , … , ��−� (4)
�� adalah kondisi saat ini, dan �� adalah kondisi
pada waktu tertentu yang berhubungan dengan ��. Sedangkan ��− adalah kondisi sebelum ��. Kemudian dapat diasumsikan bahwa sebelah kanan persamaan bersifat invariant, yaitu, dihipotesiskan dalam keseluruahan sistem, transisi diantara keadaan tertentu tetap sama dalam hubungan probabilistiknya. Berdasarkan asumsi tersebut, dapat terbentuknya suatu stet keadaan probabilitas transisi diantara dua keadaan � dan � :
� � � =
(��= ��|��− = � ), ≤ , ≤ (5)
1.2.2 Parameter HMM
HMM mempunyai parameter-parameter distribusi sebagai berikut :
a. Probabilitas Transisi (A)
Parameter A merupakan parameter dengan ukuran MxM dengan M adalah jumlah state yang ada, parameter transisi dapat dituliskan dalam bentuk matriks seperti berikut:
[image:10.595.72.278.332.441.2]Jurnal Ilmiah Komputer dan Informatika (KOMPUTA)
4
Edisi...Volume..., Bulan 20..ISSN :2089-9033
= { } , = �(��+ = � |��= � ), ≤
, ≤ (6)
b. Probabilitas observasi (B)
Parameter B merupakan probabilitas observasi atau probabilitas state merupakan kemunculan suatu state deretan seluruh state yang ada. Parameter B didalam HMM dituliskan dalam bentuk matriks kolom dengan Mx1, dimana M merupakan jumlah seluruh state yang ada. Parameter B dapat dituliskan dalam bentuk matriks seperti berikut :
= ⌈ ⌈ ⌈ ⌈ �⌉⌉ ⌉ ⌉ = { }, = � �= � |��=� � (7)
c. Distribusi keadaan awal �
Parameter phi (�), disebut sebagai parameter awal, merupakan probabilitas kemunculan suatu state di awal. Sama halnya dengan parameter B, parameter � juga dituliskan dalam bentuk matriks kolom dengan ukuran Mx1, dimana M adalah jumlah state-nya, parameter � dapat dituliskan dalam bentuk seperti berikut : � = ⌈ ⌈ ⌈ � � � ��⌉⌉ ⌉
� = {� }, � = � � = � (8)
Sedangkan parameter tertentu HMM ada dua yaitu N dan M:
a. N, jumlah keadaan model. Dinotasikan himpunan terbatas untuk keadaan yang mungkin
adalah = {� , … , ��} (9) b. M, jumlah dari simbol observasi/keadaan, ukuran huruf diskret. Simbol observasi berhubungan
dengan keluaran fisik dari sistem yang dimodelkan.
Dinotasikan himpunan terbatas untuk observasi yang
mungkin adalah
� = {� , … , � } (10)
Parameter-parameter HMM ditaksir berdasarkan kriteria maximum likelihood (ML) dan algoritma Baum-Welch (EM = Expectation Modification).
1.2.3 Permasalahan HMM
Ada 3 masalah dasar HMM yang harus dipecahkan untuk model yang diterapkan di dunia nyata, yaitu: a. Menghitung = |� bila diberikan urutan
observasi = , , … , �dan λ = (A, B, π).
(10)
Solusi:
Cara umum yang biasa digunakan adalah dengan memeriksa setiap kemungkinan urutan N state sepanjang T (banyaknya observasi). Hal ini tidak mungkin dilakukan karena perhitungannya kurang efisien. Ada prosedur lain yang lebih sederhana dan efisien adalah menggunakan prosedur forward. - Prosedur Maju (forward procedure)
Asumsi variabel forward αt(i) pada waktu ke-t dan
state ke-i didefinisikan dengan. αt (i) = P
(O1,O2,...,OT, qt=i | λ). Fungsi peluang forward dapat
diselesaikan untuk N state dan T simbol observasi secara induktif dengan langkah sebagai berikut:
o Inisialisasi, �� = π b O ,
1≤ i ≤ N (11)
o Induksi, αt+1 (j) = [∑ αN= t i α ]
bj (Oi+1),
1≤ t ≤ T-1; 1 ≤ j ≤N
(12)
o Terminasi, P(O|λ)= ∑�= � T
(13)
Perhitungan peluang forward berdasarkan pola diagram trellis. Terdapat N titik tiap time slot pada pola, semua kemungkinan deretan state digabung sebanyak N titik tanpa memperdulikan panjang deretan observasi. Pada saat t=1, dihitung nilai O1(i), 1≤i≤N. Pada waktu t = 2,3,...,T hanya diperlukan perhitungan nilai �t(j) dimana 1 ≤j≤ N.
Tiap perhitungan membutuhkan nilai sebelumnya sebanyak N dari �t-1(i) karena tiap N titik hanya
Gambar 3 Perhitungan Deret State
2. ISI PENELITIAN
2.1 Gambaran Umum Aplikasi
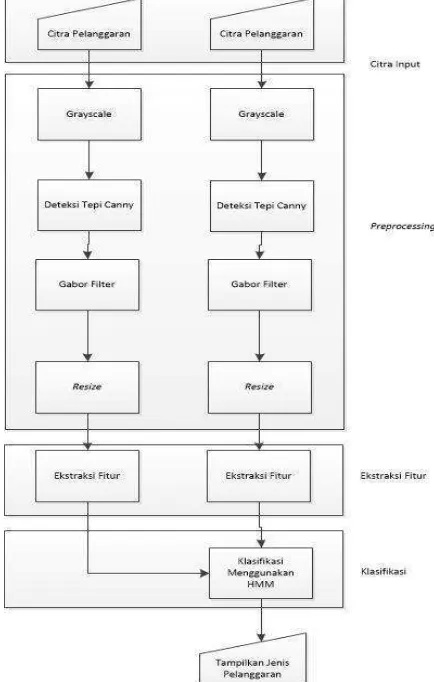
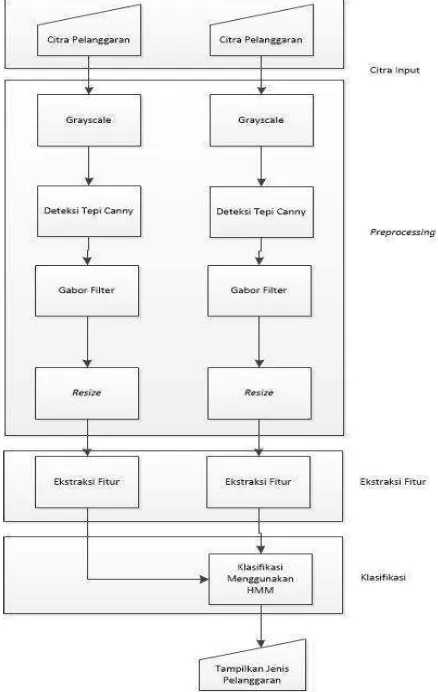
Tujuan utama dari tugas akhir ini adalah membuat aplikasi yang dapat melakukan pengenalan pelanggaran lalu lintas dilarang “Perboden” dan dilarang “balik arah” pada kendaraan. Proses diagram alir pemodelan aplikasi pada gambar 3.1 sebagai berikut :
Gambar 4 Flowchart Pemodelan Aplikasi
Pada alur pemodelan aplikasi dijelaskan terdapat 4 (empat) tahapan yaitu citra input, preprocessing, ekstraksi fitur dan klasifikasi. Dari masing-masing tahapan tersebut dapat dianalisis prosesnya lebih lanjut mulai dari data masukan berupa citra pelanggaran, kemudian masuk ke dalam preprocessing yaitu mengubah citra ke grayscale, menentukan deteksi tepi canny, filtering menggunakan gabor filter dan me-resize hasil dari gabor ke dalam 128x128. Setelah itu mencari ekstraksi ciri untuk dimasukan ke dalam klasifikasi menggunakan HMM.
2.2 Data Masukan
Data masukan yang akan diambil pada aplikasi ini merupakan citra yang diambil saat terjadi pelanggaran dilarang “Perboden” dan dilarang “balik arah”. Sehingga jelas citra merupakan sebuah pelanggaran, dan dalam penelitian ini menentukan identifikasi kategori jenis pelanggaran yang terdapat pada citra.
[image:12.595.69.286.400.741.2]Setiap proses pada proses pengolahan citra menggunakan nilai pixel dari citra untuk perhitungannya. Setiap pixel pada citra terdiri dari 3 unsur warna dasar yaitu Red (R), Green (G) dan Blue (B), yang sering disebut RGB, dan setiap unsur memiliki nilai antara 0-255 yang menjadi kode kedalaman warna dari masing-masing unsur. Sebagai contoh perhitungan pada proses-proses pengolahan citra, digunakan gambar “pelanggaran kendaraan” dapat dilakukan dengan ukuran inputan yang berbeda-beda. Citra pelanggaran dapat dilihat seperti pada gambar sebagai berikut :
[image:12.595.316.532.489.647.2]Jurnal Ilmiah Komputer dan Informatika (KOMPUTA)
6
[image:13.595.75.284.78.246.2]Edisi...Volume..., Bulan 20..ISSN :2089-9033
Gambar 6 Pelanggaran Dilarang “Perboden”
Dari citra masukan yang ukurannya berbeda-beda karena dimensi setiap pengambilan citra dapat dilakukan dengan berbagai tools yang notabennya tidak memiliki ukuran pixel yang sama, maka perlu adanya resize pada preprocessing untuk menyamakan ukuran dimensi pixel citra. Pada penelitian ini resize akan dilakukan menjadi 128x128 pixel.
2.3 Pengujian Aplikasi
Pengujian aplikasi merupakan tahapan yang memiliki tujuan untuk menemukan kekurangan pada perangkat lunak yang diuji. Pengujian bermaksud untuk mengetahui perangkat lunak yang dibuat sudah memenuhi kriteria yang sesuai dengan tujuan perancangan dan pengujian perangkat lunak ini menggunakan pengujian black box. Pengujian black box berfokus pada persyaratan fungsional perangkat lunak, dan juga pengujian terhadap performansi yang dilakukan untuk menghasil nilai pengujian terhadap klasifikasi.
Pengujian black box digunakan untuk menentukan pengujian yang dilakukan ini terbagi menjadi beberapa scenario. Seperti yang terlihat dibawah ini.
2.3.1 Skenario Pengujian Data
Berikut ini adalah scenario pengujian seperti terlihat pada tabel dibawah ini :
Skenario Pengujian Data
2.3.2 Skenario Fungsional
[image:13.595.305.557.166.589.2]Skenario fungsional menjelaskan tentang pengujian terhadap fungsional aplikasi yang digunakan. Berikut merupakan hasil pengujian pada aplikasi tersebut :
Tabel Skenario Fungsional
Fungsional Aktifitas
yang diharapkan
Pengujian Kesimpulan
Grayscale Mengubah citra asli menjadi grayscale
[√ ] diterima [ ] tidak diterima Deteksi Tepi Canny Mengubah citra grayscale menjadi citra deteksi tepi canny.
[√ ] diterima [ ] tidak diterima
Gabor Filter
Mengubah citra deteksi tepi menjadi citra hasil gabor filter.
[√ ] diterima [ ] tidak diterima
Resize Mengubah ukuran citra hasil gabor filter menjadi 128x128 pixel.
[√ ] diterima [ ] tidak diterima
2.3.3 Kasus dan Hasil Pengujian
Berdasarkan rencana pengujian yang telah tersusun, maka dapat dilakukan pengujian seperti yang dijelaskan pada tabel di bawah ini :
Kasus dan Hasil Uji
Data masuka n Aktifitas yang diharapka n Pengamata n Kesimpula n Kelas Uji Butir Uji Jenis
Pengujian
Gambar Menguji gambar masukan
Blackbox
Pengelolaan data training
Mengelola data dari citra latih
[image:13.595.303.533.662.739.2]Gambar Terdeteksi “Perboden ”
Aplikasi menampilka n jenis pelanggaran “Perboden” dari gambar masukan.
[√ ]
diterima
[ ] tidak diterima
Terdeteksi “balik arah”
Aplikasi menampilka n jenis pelanggaran “balik arah” dari gambar masukan.
[√ ]
diterima
[ ] tidak diterima
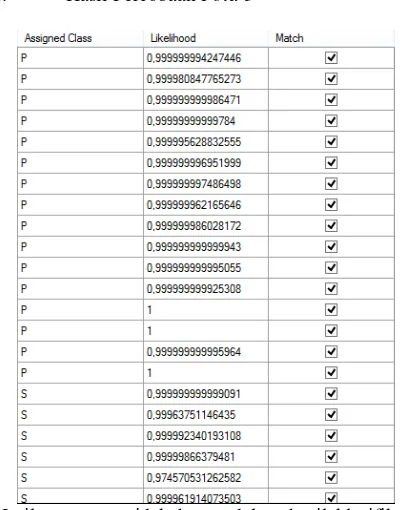
2.4 Pengujian Performansi
Pengujian performansi digunakan untuk mengetahui akurasi yang dilakukan menggunakan metode k-fold cross validation, dengan nilai k sebanyak 10 fold. Bertujuan untuk menguji stabilitas akurasi jika diuji dengan data latih dan data uji yang berbeda. Penggunaan 10 fold ini dianjurkan karena merupakan jumlah fold terbaik untuk uji validitas. Pengujian dilakukan pada metode Hidden Markov Model (HMM). Untuk pegujian pada metode Hidden Markov Model (HMM) data yang digunakan sebanyak 82 data yang dibagi menjadi 2 subset dengan kategori pelanggaran “perboden” dan “balik arah”, dan yang digunakan dalam pengujian performansi menggunakan iterasi sebanyak 50 kali. Skenario uji performasi akurasi dengan metode fold cross validation sebagai berikut :
a. Hasil Percobaan Fold 1
Hasil test yang tidak benar dalam hasil klasifikasi pada subset 1 yaitu 20. Sehingga nilai akurasi dalam percobaan fold 1 yaitu ∗ % = . %.
b. Hasil Percobaan Fold 2
Hasil test yang tidak benar dalam hasil klasifikasi pada subset 2 yaitu 2. Sehingga nilai akurasi dalam percobaan fold 2 yaitu ∗ % = . %.
c. Hasil Percobaan Fold 3
Jurnal Ilmiah Komputer dan Informatika (KOMPUTA)
8
Edisi...Volume..., Bulan 20..ISSN :2089-9033
d. Hasil Percobaan Fold 4
Hasil test yang tidak benar dalam hasil klasifikasi pada subset 4 yaitu 3. Sehingga nilai akurasi dalam percobaan fold 1 yaitu
6∗ % = . %.
Hasil Perhitungan Akurasi
Fold Akurasi
Fold 1 50%
Fold 2 30%
Fold 3 40%
Fold 4 30%
Rata – rata akurasi
. % + . % + % + . %
= . %
Dari pengujian K-Fold Cross Validation menggunakan 82 data didapatkan nilai akurasi rata-rata 70,31% benar dalam klasifikasi dan 29.69% salah. Faktor penyebab ketidak validan dalam mengklasifikasikan menggunakan metode Hidden Markov Model (HMM) karena sangat bergantung pada ciri yang digunakan sebagai data latih.
3. KESIMPULAN
Kesimpulan dari penelitian yang berjudul : “Implementasi metode Hidden Markov Model dan Gabor Filter Untuk Mendeteksi Pelanggaran Lalu Lintas Kendaraan” adalah sebagai berikut :
1. Penelitian pada pengolahan citra pelanggaran kendaraan dapat digunakan untuk mendeteksi citra jenis pelanggaran kendaraan yaitu dilarang “Perboden” dan “balik arah”.
2. Metode Hidden Markov Model dapat diterapkan dalam proses klasifikasi menentukan jenis pelanggaran “balik arah” dan “Perboden” yang dilakukan kendaraan
pada pengolahan citra pelanggaran kendaraan dengan hasil akurasi rata-rata 70,31% benar dalam klasifikasi.
4. DAFTAR PUSTAKA
[1] Website Resmi Korps Lalu Lintas POLRI. 2015. http://lantas.polri.go.id.
[2] Website Resmi Pemerintahan Jawa Barat. 2015. http://www.jabarprov.go.id.
[3] D Sudian, Arman dan P Priambodo. “Aplikasi
Pengenalan Wajah (Face Recognition) Menggunakan Metode Hidden Markov Model (HMM)”. Teknik Elektro, UI.
[4] E Yuwitaning, B Hidayat dan N Andini. “Implementasi Metode Hidden Markov Model Untuk Deteksi Tulisan Tangan”. Teknik Elektro, Universitas Telkom.
[5] H Kekre and V Bharadi. 2010. “Gabor Filter Based Feature Vector for Dynamic Signature Recognition.”.
[6] D Murugan, S Arumugam, K Rajalakshmi dan Manish. 2010. “Performance Evaluation of Face Recognition Using Gabor Filter, Log Gabor Filter and Disctere Wavelet Transform”.
[7] Sepritahara. 2012. “Aplikasi Pengenalan Wajah (Face Recognition) Menggunakan Metode Hidden Markov Model (HMM)”. Skripsi. Jakarta: Fakultas Teknik, Universitas Indonesia.
[8] A Margono, I Gunawan dan R Lim. 2004. “Pelacakan dan Pengenalan Wajah Menggunakan Metode Embedded Hidden Markov Models”.
[9] A Agung, Fazmah A Yulianto dan W Maharani. 2011. “Pengenalan Wajah Menggunakan Psedo-2D Hidden Markov Model”.
[10] P Dymarski. 2011.“Hidden Markov Model, Theory and
Aplications”. India: InTech.
[11] A Khandual, G Baciu and N Rout. 2013. “Colorimetric Preprocessing o
f Digital Colour Image”.
[13]
Canny Edge Detector Class. 2015. http://www.aforgenet.com/framework/docs/html/e08cae 30-7a37-db9f-cede-05cf6521343f.htm
[14]
Jurnal Ilmiah Komputer dan Informatika (KOMPUTA)
1
Edisi...Volume..., Bulan 20..ISSN :2089-9033
IMPLEMENTATION OF HIDDEN MARKOV MODEL AND GABOR
FILTER TO DETECT PUBLIC VEHICLE VIOLATIONS
Kukuh Setiawan
Teknik Informatika – Universitas Komputer Indonesia Jl. Dipatiukur 112-114 Bandung
Email : [email protected]
ABSTRACT
The number of traffic violations from year to year has increased. It is known from analysis and evaluation data of traffic offences there is a rise in 2015, traffic violations committed riders if compared with the period in 2014. Then the relation to this research, that recognize the type of offence by way of a Hidden Markov Model as classification methods and Gabor Filter in image processing based on the problems presented. Things to note in knowing violation, infringement upon a signpost to classify the image around the vehicle. And within the boundaries of the problem observed research focus
to signs "don’t enter" and "don’t turn back". So the
offense that was the Foundation of the research using methods to be able to generate conclusions this type of offence. When encountered with such a pattern of that signs, then direction violations can be detected from the classification of the extraction of the characteristics at the time of image preprocessing stage. Then the methods used to detect violations of the image Hidden Markov Model in the process of classification and image of Gabor Filters as one way the preprocessing image. By implementing these methods are intended to be able to meet the need to detect the violations committed by the vehicle. The results of this research in the form of data classification training which is used to detect data testing, and produce an output type of offence intended. And testing of K-Fold Cross Validation using data obtained 82, average accuracy value 70.31% correct classification and 29.69% invalid.
Keywords :
Gabor filter, Hidden Markov Models, image classification, image processing, violation of vehicle.
1. INTRODUCTION
Traffic regulations made in the public interest with the goal of creating order in the drive, because the rules are obeyed, it will create a comfortable atmosphere while using traffic facilities. But still, there are those who commit the offense, and the amount of vehicle traffic violations from year to
year increase. It was known from the data analysis and evaluation of traffic violations in 2015, there is a rise in the number of traffic violations committed rider when compared with the period in 2014. [1] And in the city of Bandung in one week alone there were an average of 1200 docket last violation cross on trial. [2]
In terms of this study, which detects the image processing vehicle violations that will be a study to determine the types of violations that occur based on the issues presented. Things to consider in knowing violation of an object is a vehicle and symbol signs in the vicinity. Violations that will be used as a research method to produce conclusions of violations. When encountered signs with patterns such as banned "Don’t Enter" or forbidden "turning toward" the offense can be detected using pattern recognition. The method used to detect the image of this offense, namely Hidden Markov Model as image classification and Gabor filter as one image preprocessing, by implementing these methods are intended to be able to meet the needs of detected offenses committed by vehicles.
Regarding the Hidden Markov Model (HMM) is a method that can determine patterns of violations of the vehicle based on probability, it can be analyzed that the vehicle has a traffic violation. Or sequence feature extraction matrix formed image preprocessing results will be stored in the database as a value classification and HMM working hides another image that does not fit in the database image edge detection value of training with a given state, so it will detect the violation in question. [3]
signature pattern recognition HMM only has an average of 43.35% CER with the explanation that the smaller the CER (Character Error Rate), the better the resulting accuracy, while the introduction of handwritten letters and numbers achieve an accuracy of 74%. That means the introduction of the resulting better than the preprocessing. [4] In the end to assist in refining the HMM weakness then the need for other methods mangkus in the image preprocessing stage before image classification.
Concerning Gabor filter is a method with object recognition which can be defined as the process of determining the identification of the object. This method can detect any dots produced with high accuracy [5] [6] The image before entering them into a database, the image will first be processed using the method of preprocessing and one of them is Gabor FIlter. Gabor convolution calculation filter will produce a specific value called Gabor jet responses to achieve thresholding.
It is necessary both methods with different functionalities that Gabor filter to enhance the preprocessing stage and HMM to generate classification.
1.1 Gabor Filter
As the filter is used Gabor 2D filter kernel obtained by modulating a sine wave at a frequency 2D and specific orientation with Gaussian envelope. Basic equation Gabor filter kernel function 2D equation shown in the following equation:
(1)
Then x and y is the standard deviation of the
Gaussian envelope dimensions x and y. and n is the wavelength and orientation of the 2-D sine wave. The deployment of the Gaussian envelope is defined in the form of a sine wave .. Rotation of x - y by angle produce n Gabor filter at orientation. Here is
an equation calculating the standard deviation:
(2)
The default parameters used to calculate Gabor filters can be found in the documentation accord library.[12]
Orientation ͠θn = 0.6
Gaussian Variance Sigma = 2
Aspect Ratio Gamma = 0.3
Kernel Size fx=3
Wave length = 4
As in calculating the final result can be performed on Gabor value equation formula (3):
(3)
If all Gabor filters with a variation of the wavelength () and orientation (n) is applied at a certain point
(x, y), then obtained a lot of response filter to the point, for example: use four wavelengths ( = 3, 5, 7, 10) and eight orientation, it will produce thirty-two response filter for each image point that dikonvolusikan the filters.
1.2 Hidden Markov Model
Hidden Markov Model or better known as the Hidden Markov Model (HMM) is a statistical model of a system that is assumed to be a process of Markov with a parameter that is not known, and the challenge is to determine the parameters of the hidden (state) of parameters that can be observed ( observer). The parameters set can then be used for further analysis, for example for pattern recognition applications (Pattern Recognition). A HMM can be considered as a dynamic Bayesian Network simplest.
In general Markov models (Vanilla / Visible Markov Model), its state can be observed directly, therefore the probability of the state transition (state) being the only parameter. Inside the hidden Markov model, its state can’t be observed directly, but can be observed are the variables that are affected by the state. Each state has a probability distribution over the tokens output that may arise. Therefore, a series of tokens generated by HMM gives some information about the sequence of state-state. [4]
Jurnal Ilmiah Komputer dan Informatika (KOMPUTA)
3
Edisi...Volume..., Bulan 20..ISSN :2089-9033
1.2.1 Markov Chain
Markov chains (Markov Chains) is a mathematical technique that is commonly used to perform modeling (modeling) a wide variety of business systems and processes. This technique can be used to estimate changes in the future in a dynamic variables on the basis of the changes of the dynamic variables in time plainly. This technique can be used also for analyzing events in the future times mathematically.
Markov Chain Model (Markov Chains) discovered by a Russian named Andrey Markov in 1906, namely: "For every time t, when the event is Kt and all previous events are �� ... , �� −� that occurs from a process is known, the probability of the whole incident to come Kt (j) only depends on the incidence of �� − and does not rely on previous events that �� − , �� − ,..., �� −�.”.
Markov chains (Markov Chains) when given the input state of the current state, the state will come is unpredictable and can be separated from the state in the past. That is, a description of the current state captures all the information that affects the evolution of a system in the future. In other words, the future condition addressed by using probability.
[image:19.595.116.287.503.613.2]That is about markov chain an then movements of variables in future able to predictable according variables movements at the past. K_t4 influenced by events K_t3, K_t3 K_t2 influenced by events and so on which this change occurred because of the role of the transition probability (transition probability). Genesis K_t2 for example, will not affect the incidence of K_t4.
Figure 2 Markov Chains
Markov Chains helpful to calculate the probability of an event is observed that in general can be formulated as follows:
� = ��|��− , ��− , ��− , … , ��−� (4)
σ_t is the current state, and σ_t is the condition at a particular time associated with σ_t. While σ_ (t-i) is the condition before σ_t. Then it can be assumed that the right of the equation is invariant, ie, hypothesized in entire of system, the transition between the specific circumstances remained the same in its probabilistic relationships. Based on these assumptions, it can be the formation of a stet
state transition probability between two states K_i and t_j:
Transition probability =
(��= ��|��− = � ), ≤ , ≤ (5)
1.2.2 Parameter HMM
HMM mempunyai parameter-parameter distribusi sebagai berikut :
a. Probabilitas Transisi (A)
Parameter A merupakan parameter dengan ukuran MxM dengan M adalah jumlah state yang ada, parameter transisi dapat dituliskan dalam bentuk matriks seperti berikut:
= ⌈ ⌈ ⌈ ⌈ � � � � � ⋱ � ��⌉ ⌉ ⌉ ⌉ = { } , = �(��+ = � |��= � ), ≤
, ≤ (6)
b. Probability Of Observation (B)
Parameter B is an observation probability or likelihood state is the appearance of a state existing rows of the entire state. Parameter B in HMM written in matrix form column with MX1, where M is the sum of all existing state. Parameter B can be written in matrix form as follows:
= ⌈ ⌈ ⌈ ⌈ �⌉⌉ ⌉ ⌉ = { }, = � �= � |��=� � (7)
c. Initial State Distribution �
Parameter pi (π), referred to as the initial parameters, the probability of occurrence of a state in the beginning. Similarly, the B parameter, parameter π is also written in the form of a column matrix with the size of the MX1, where M is the number of their state, parameter π can be written in the following form: � = ⌈ ⌈ ⌈ � � � ��⌉⌉ ⌉
� = {� }, � = � � = � (8)
N, the number of states the model. Notated finite set of possible states is Q = {q_1, ..., q_N} (9)
M, the number of observation symbols / state, discrete font size. Symbol observation relates to the physical output of the modeled system. Notated limited set of observations is probably the
V = {V_1, ..., V_M} (10)
HMM parameters are estimated based on the criteria of maximum likelihood (ML) and the Baum-Welch algorithm (EM = Expectation Modification).
1.2.3 HMM Problems
There are 3 basic human rights issue that must be solved for the model applied :
a. calculating = |� = , , … , �dan λ = (A, B, π). (10)
Solution :
How common is commonly used to examine every possible state sequence along T N (number of observations). This is not possible because the calculation is less efficient. There are other procedures more simple and efficient is the use of forward procedure.
- forward procedure
forward αt(i) at ke-t and state ke-i define with. αt (i)
= P (O1,O2,...,OT, qt=i | λ). Functions can be solved
forward opportunities for the N T symbol observation state and inductively with the following steps:
o Initialitation, �� =
π b O , 1≤ i ≤ N (11)
o Induction, αt+1 (j) = [∑ αN= t i α ]
bj (Oi+1),
1≤ t ≤ T-1; 1 ≤ j ≤N
(12)
o Termination, P(O|λ)=
∑� � T
= (13)
The calculation of odds forward based on the pattern of trellis diagram. There are N points each time slot on the pattern, all possible row combined state as a point regardless of length N rows of observation. At the time t = 1, calculated the value of O1 (i), 1≤i≤N. At time t = 2,3, ..., T is only required calculation of the value αt (j) where 1 ≤j≤ N.
[image:20.595.322.510.86.269.2]Each calculation requires as much as the previous value of αt N-1 (i) for each N point can only be connected to the N points on the previous time slot.
Figure 3 Serial of State
2. Research
2.1 Overview
The main objective of this thesis is to create applications that can perform the introduction of a traffic violation is prohibited "Don’t Enter" and prohibited "reverse direction" in the vehicle. The process flow diagram modeling applications on the following picture:
[image:20.595.310.529.397.743.2]Jurnal Ilmiah Komputer dan Informatika (KOMPUTA)
5
Edisi...Volume..., Bulan 20..ISSN :2089-9033
In the modeling workflow application are described there are 4 (four) stages, namely the input image, preprocessing, feature extraction and classification. From each of these stages can be analyzed process is further from the input data in the form of the image of the violation, then into the preprocessing is to convert the image to grayscale, decisive edge detection Canny, filtering using Gabor filter and resize result of Gabor into 128x128. After that, look for the feature extraction to be included in the classification using HMM.
2.2 Input
Data input will be taken on this application is an image that is taken when a violation is prohibited "Don’t Enter" and prohibited "reverse direction". So clearly the image of an offense, and in this study determines the identification of categories of offenses contained in the image.
[image:21.595.316.526.91.246.2]Each process on image processing using pixel values of the image for calculation. Each pixel in the image is composed of three elements of basic colors namely Red (R), Green (G) and Blue (B), which is often called RGB, and each element has a value between 0-255 which became the code color depth of each of the elements , For example, the calculation of the processes of image processing, image used "vehicle violations" to do with the size varying input. The image of a violation can be seen as in the following picture:
Figure 5 Image Infringement prohibited "reverse direction"
Figure 6 Violations Prohibited "don’t enter"
Of the input image size is different because of the dimensions of each image acquisition can be performed with a variety of tools that notabennya not have the same pixel size, it is necessary to resize the preprocessing to match the size of the image pixel dimensions. In this research will be conducted resize be 128x128 pixels.
2.3 Testing
Application testing is a stage that has the purpose to find flaws in the software being tested. The test aims to determine the software that made already meet the criteria in accordance with the purpose of designing and testing this software using black box testing. Black box testing focuses on functional requirements of the software, and also to the performance testing conducted to test the classification menghasil value.
Black box testing is used to determine the testing performed is divided into several scenarios. As seen below.
2.3.1 Scenario of Testing
Here is a test scenario as shown in the table below:
2.3.2 Fungsional Scenario
Functional Scenario describes the functional testing of applications used. Here are the results of testing on the application:
Testing Class
Process Type
Images Test input of image
Blackbox
Training data
Manage the data from image of train
[image:21.595.74.290.452.612.2]Fungtion al
activity Testing Conclusio
n
Grayscale Change image to grayscal e
[√ ] accept [ ] reject
Canny Edge Detection
Change grayscal e to canny edge detection .
[√ ] accept [ ] reject
Gabor Filter
Canny to gabor filter.
[√ ] accept [ ] reject
Resize Rezing to be 128x128 pixel.
[√ ] accept [ ] reject
2.3.3 Cases and Test Results
Based on the test plan has been finalized, it can be tested as described in the table below:
Result
Input Activity Observation Conclusion
Image detected “Don’t Enter”
The apps show “Don’t Enter” from input.
[√ ]
accept
[ ] reject
detected “turn back”
Show “turn back” from input.
[√ ] accept [ ] reject
2.4 Pengujian Performansi
Performance testing is used to determine the accuracy of which is done using k-fold cross validation, with k values as much as 10 fold. Aiming to test the stability of accuracy when tested with the training data and test data are different. The use of a 10-fold is recommended as the best to fold the number of test validity. Tests conducted on methods of Hidden Markov Model (HMM). To test of the method of Hidden Markov Model (HMM) data that is used by 82 data is divided into two subsets with categories of violations "Do not Enter" and "reverse direction", and used in performance testing using iterations 50 times. The accuracy of the test scenario performasi fold cross validation method as follows:
a. Testing Result Fold 1
Jurnal Ilmiah Komputer dan Informatika (KOMPUTA)
7
Edisi...Volume..., Bulan 20..ISSN :2089-9033
The test results are not correct in the classification results in a subset 2 is 2. So the value of accuracy in experiments fold 2 that is ∗ % = . %.
c. Testing Result Fold 3
The test results are not correct in the classification results in a subset 3 is 0. So the value of accuracy in experiments is ∗ % = %.
Hasil Percobaan Fold 4
Hasil test yang tidak benar dalam hasil klasifikasi pada subset 4 yaitu 3. Sehingga nilai akurasi dalam percobaan fold 1 yaitu
6∗ % = . %.
Accuration Result
Fold Accuration
Fold 1 50%
Fold 2 30%
Fold 3 40%
Fold 4 30%
Average Of
Accuration
. % + . % + % + . %
= . %
Of testing C-Fold Cross Validation uses 82 data got an average accuracy value of 70.31% correct classification and 29.69% wrong. Factors causing the lack validan in classifying using Hidden Markov Model (HMM) because it depends on the traits that are used as training data.
3. Conclusion
Conclusions from the study entitled: "Implementation of Hidden Markov Model method and Gabor Filter To Detect Vehicle Traffic Violations" is as follows:
1. Research on offense vehicle image processing can be used to detect the image of the type of offense the vehicle is prohibited "Do not Enter" and "reverse direction".
2. Method Hidden Markov Models can be applied in the process of determining the classification of the type of offense "reverse direction" and "Do not Enter" made vehicle on vehicle violations image processing with accuracy results average 70.31% correct classification.
4. LITERATUR
[1] Website Resmi Korps Lalu Lintas POLRI. 2015. http://lantas.polri.go.id.
[2] Website Resmi Pemerintahan Jawa Barat. 2015. http://www.jabarprov.go.id.
[3] D Sudian, Arman dan P Priambodo. “Aplikasi
Pengenalan Wajah (Face Recognition) Menggunakan Metode Hidden Markov Model (HMM)”. Teknik Elektro, UI.
[4] E Yuwitaning, B Hidayat dan N Andini. “Implementasi Metode Hidden Markov Model Untuk Deteksi Tulisan Tangan”. Teknik Elektro, Universitas Telkom.
[5] H Kekre and V Bharadi. 2010. “Gabor Filter Based Feature Vector for Dynamic Signature Recognition.”.
[7] Sepritahara. 2012. “Aplikasi Pengenalan Wajah (Face Recognition) Menggunakan Metode Hidden Markov Model (HMM)”. Skripsi. Jakarta: Fakultas Teknik, Universitas Indonesia.
[8] A Margono, I Gunawan dan R Lim. 2004. “Pelacakan dan Pengenalan Wajah Menggunakan Metode Embedded Hidden Markov Models”.
[9] A Agung, Fazmah A Yulianto dan W Maharani. 2011. “Pengenalan Wajah Menggunakan Psedo-2D Hidden Markov Model”.
[10] P Dymarski. 2011.“Hidden Markov Model, Theory and
Aplications”. India: InTech.
[11] A Khandual, G Baciu and N Rout. 2013. “Colorimetric Preprocessing o
f Digital Colour Image”.
[12] Gabor Filter Imaging Filter. 2015. http://accord-framework.net/docs/html/T_Accord_Imaging_Filters_G aborFilter.htm.
[13]
Canny Edge Detector Class. 2015. http://www.aforgenet.com/framework/docs/html/e08cae 30-7a37-db9f-cede-05cf6521343f.htm
[14]
iii
KATA PENGANTAR
Puji dan syukur penulis panjatkan kehadirat Tuhan Yang Maha Esa atas rahmat
dan karunia-Nya sehingga penulis dapt menyelesaikan skripsi yang berjudul
“Implementasi
Hidden Markov Model dan Gabor Filter
Untuk Mendeteksi
Pelanggaran Lalu Lintas Kendaraan.”
Skripsi ini dibuat sebagai salah satu syarat kelulusan pada program Strata Satu
(S1) Fakultas Teknik dan Ilmu Komputer, Program Studi Teknik Informatika di
Universitas Komputer Indonesia. Penulis menyadari bahwa skripsi ini masih
banyak kekurangan dari berbagai macam hal. Namun berkat bantuan dan
bimbingan dari beberapa pihak akhirnya skripsi ini dapat diselesaikan tepat pada
waktunya. Dengan penuh rasa syukur, ucapan terima kasih yang mendalam serta
penghargaan yang tidak terhingga penulis sampaikan kepada:
1.
Kepada keluarga tercinta, kedua orang tua, kakak dan bibi yang selalu
memberikan kasih sayang, doa, motivasi dan dukungan baik moril maupun
materil yang tiada hentinya.
2.
Yth. Ibu
Ednawati
Rainarli, S.Si., M.Si.
selaku dosen wali kelas IF-11
angkatan 2011 dan juga berperan menjadi
reviewer
saat seminar dan
sidang.
3.
Yth. Bapak Irfan Maliki, S.T., M.T. selaku pembimbing yang telah
memberikan pengarahan dan masukan-masukan yang berharga kepada
penulis dalam mengerjakan laporan tugas akhir ini, sehingga menjadikan
modal yang baik bagi penulis saat terjun dalam bermasyarakat ke
depannya. Semoga pahala Bapak dilipat gandakan Tuhan atas keikhlasan,
kesabaran dan kegigihan saat membimbing penulis dalam menyelesaikan
tugas akhir ini.
4.
Yth. Ibu
Ken Kinanti
, S.Kom., M.T.
selaku penguji 3 yang telah
memberikan banyak masukan, arahan, dan bimbingan yang berarti bagi
ilmu di UNIKOM.
6.
Maretha Chaesar Rahma Putri, seorang kekasih dalam hidup penulis, yang
selalu memberikan motivasi, semangat dan inspirasi. Sehingga penulis
dapat menyelesaikan tugas akhir ini.
7.
Untuk semua pihak yang tidak bisa disebutkan satu persatu yang telah
membantu dalam menyelesaikan skripsi ini baik secara langsung maupun
secara tidak langsung.
Akhir kata penulis hanya berharap semoga skripsi ini dapat bermanfaat bagi
penulis dan para pembaca umumnya.
Bandung, 27 Februari 2016
Penulis
D-1
BIODATA PENULIS (RIWAYAT HIDUP)
DATA PRIBADI
Nama
: Kukuh Setiawan
Jenis Kelamin
: Laki
–
Laki
Golongan Darah
: B
Tempat & Tanggal Lahir
: Pati, 01 Oktober 1992
Alamat
: Jl Nusa Indah 3 RT 05 RW 05 Kec. Trangkil, Kab.
Pati
No. Telepon
: 085641523180
:
[email protected]
PENDIDIKAN FORMAL
1999
–
2005
: SD Negeri 5 Trangkil
2005
–
2008
: SMP Negeri 3 Pati
2008
–
2011
: SMA Negeri 1 Pati
2011 – 2016
: Universitas Komputer Indonesia (UNIKOM)