ANALISIS KESTABILAN MODEL PERTUMBUHAN KONTINU DAN
MODEL PERTUMBUHAN
DISKRET
Oleh:
SITI MUSLIAH
G54101011
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
ABSTRAK
SITI MUSLIAH. Analisis Kestabilan Model Pertumbuhan Kontinu dan Model Pertumbuhan Diskret. Dibimbing oleh ANNIS D. RAKSANAGARA dan ALI KUSNANTO.
Laju perubahan suatu populasi dapat dipengaruhi oleh empat hal yaitu tingkat kelahiran, tingkat kematian, imigrasi dan emigrasi. Laju perubahan suatu populasi dapat dimodelkan ke dalam suatu persamaan diferensial yang dapat memprediksikan pertumbuhan suatu populasi secara eksponensial. Terbatasnya sumber-sumber seperti ruang dan makanan dan juga adanya jumlah populasi yang terlalu padat menyebabkan populasi dibatasi oleh suatu daya dukung lingkungan sehingga pertumbuhan populasi lambat laun akan menurun dan akhirnya akan berhenti jika daya dukung lingkungan tercapai.
Berdasarkan waktu, model pertumbuhan populasi dapat dibagi menjadi model pertumbuhan kontinu dan model pertumbuhan diskret. Model yang dibahas dalam karya ilmiah ini adalah model pertumbuhan kontinu yang disebut sebagai persamaan logistik. Pada model ini, jika populasi awalnya sama dengan nol dan populasi awalnya sama dengan daya dukung lingkungannya yaitu batas atas ukuran populasi yang dapat didukung oleh sumber daya yang tersedia, maka populasi akan tetap konstan. Jika populasi awalnya kurang dari daya dukung lingkungan, maka populasi akan meningkat menuju daya dukung lingkungan. Dan jika populasi awalnya lebih dari daya dukung lingkungan, maka populasi akan semakin menurun dan menuju daya dukung lingkungan.
Ada 2 titik tetap yang diperoleh pada model ini yaitu titik tetap tidak stabil yaitu pada saat jumlah populasi sama dengan nol dan titik tetap yang stabil yaitu pada saat jumlah populasi sama dengan daya dukung lingkungan. Selain itu, diperoleh juga solusi yang stabil.
Salah satu bentuk variasi dari persamaan logistik yaitu persamaan logistik tak otonom. Pada model ini tingkat pertumbuhan populasi dan daya dukung lingkungannya tergantung pada waktu. Hal ini bisa disebabkan oleh adanya pengaruh tahunan yang mempengaruhi laju pertumbuhan populasi. Salah satunya yaitu disebabkan oleh pengaruh musim. Oleh karena itu, populasi mengalami fluktuasi.
Pada kehidupan nyata, banyak fenomena perubahan populasi yang terjadi secara diskret. Fenomena ini dapat dimodelkan ke dalam persamaan beda. Salah satu model yang dibahas yaitu bentuk analog diskret dari model pertumbuhan eksponensial kontinu. Model ini merupakan model perubahan populasi yang dihitung secara tahunan.
ABSTRACT
SITI MUSLIAH. Stability Analysis of Continuous Growth Model and Discrete Growth Model. Under the direction of ANNIS D. RAKSANAGARA and ALI KUSNANTO.
Population change rate is influenced by birth rate, death rate, imigration and emigration. It can be modeled into a differential equation which predicts that population grow exponentially. Limited sources such as space and food, also dense number of population have caused population been limited by a carrying capacity of environment. So population growth gradually decrease and finally stop if the carrying capacity has been reached.
Based on time, models of population growth are divided into continuous growth model and discrete growth model. In this paper, the continuous growth model known as logistic equation will be discussed. In this model, if the initial population equal to zero or has the same value with its carrying capacity of environment (that is, upper bound of population growth supported by an available resources), so the population will be constant. If the initial population less than carrying capacity, then population will increase to the carrying capacity of environment. And if the initial population exceeds the carrying capacity, so the population will reduce to the carrying capacity.
There are two fixed points captured in this model, those are unstable fixed point when the number of population is equal to zero and stable fixed point when the number of population is equal to the carrying capacity of environment. The model also reached a stable solution.
Non autonomous logistic equation is one of the logistic equation form. In this model, the population growth rate and carrying capacity of environment depend on time. This is caused by the annual influence to the population growth rate, such as seasonal influence. Therefore, the population become fluctuative.
In the real life, there are so many phenomenon of population change that happened discretically. This phenomenon can be modeled into a difference equation. One which is discussed is a discrete analogue form of continuous exponential growth model. This is the population change model counted annually.
ANALISIS KESTABILAN MODEL PERTUMBUHAN KONTINU DAN
MODEL PERTUMBUHAN DISKRET
SITI MUSLIAH
G54101011
Skripsi
Sebagai salah satu syarat untuk memperoleh gelar
Sarjana Sains pada
Departemen Matematika
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
Judul Skripsi : Analisis Kestabilan Model Pertumbuhan Kontinu dan Model
Pertumbuhan Diskret
Nama
: Siti Musliah
NRP
: G54101011
Menyetujui :
Pembimbing I, Pembimbing II,
Dra. Annis D. Raksanagara, M.Si. Drs. Ali Kusnanto, M.Si.
NIP. 132133396 NIP. 131913135
Mengetahui :
Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam
Institut Pertanian Bogor
Prof. Dr. Ir. Yonny Koesmaryono, M.S.
NIP. 131473999
PRAKATA
Bismillahirrahmanirrahim,Alhamdulillah, Puji dan Syukur penulis panjatkan kehadirat Allah SWT atas segala rahmat dan karunia-Nya sehingga karya ilmiah ini berhasil diselesaikan. Shalawat dan salam semoga tercurah kepada Rasulullah SAW, beserta keluarga, sahabat dan pengikutnya hingga akhir zaman.
Dalam kesempatan ini, penulis mengucapkan jazakumullah khairan katsiran, terima kasih banyak kepada:
1. Ibu Dra. Annis D. Raksanagara, M.Si dan Bapak Ali Kusnanto, M.Si selaku pembimbing I dan pembimbing II. Dan juga kepada Ibu Dr. Ir. Endar H. N, MS selaku penguji. Terima kasih atas segala bantuan dan bimbingan yang telah Bapak dan Ibu berikan kepada penulis. Mudah-mudahan Allah membalasnya dengan berlipat ganda. Penulis mohon maaf jika selama ini banyak melakukan kesalahan dan kekhilafan.
2. Bapak dan Umi yang selama ini telah begitu sabar menunggu kelulusan penulis. Terima kasih atas semua do’a, dukungan dan kasih sayang yang telah diberikan kepada penulis. Mohon maaf yang sebesar-besarnya jika selama ini telah banyak mengecewakan Umi dan Bapak. A’Budi (terima kasih atas bantuannya), A’Jumul, Teh Elim, Nia, Sarah (semoga kalian bisa lebih dewasa lagi, lebih dekat pada Allah dan semoga kalian semua bisa sukses), keponakanku Jiddan yang lucu dan pintar (semoga menjadi anak yang sholeh) dan juga kepada seluruh keluarga tercinta.
3. Seluruh staf (Ibu Susi, Ibu Ade, dll.) dan dosen Departemen Matematika IPB atas segala bantuan dan dukungannya.
4. Sahabat-sahabat saya yang sangat saya cintai (Lilis, Ika, Awang, Evi, Yana, Atin, Hawa) semoga kita masih bisa bertemu dan berkumpul lagi seperti dulu. Dan juga teman-teman Mahasiswa/i Matematika Angkatan 38 (Devi, Linda, Ami, dll.), Angkatan 39, Angkatan 40 dan Angkatan 41. Ikhwan dan Akhwat di Jurusan, Fakultas dan seluruh IPB, semoga tetap istiqomah.
5. Ikhwan dan Akhwat di DPRa Loji, khususnya Teh Ela yang telah banyak mendukung, afwan kalau saya pernah berbuat salah. Ikhwan dan Akhwat di DPC Ciomas (Ibu Mimin dan suami, Ibu Irma, Mba Khusnul dkk, Eva, Mute dkk), khusus untuk Mute semoga tetap semangat menyelesaikan penelitiannya.
6. Uli, Dwi dan Darwisah yang telah bersedia menjadi pembahas dan juga Yuda yang telah bersedia menjadi notulen. Semoga Allah mempermudah segala urusan kalian.
7. Teman-teman RISMA Al-Ikhlas (Remaja Islam Masjid Al-Ikhlas), semoga kita bisa kompak dan bisa bersama-sama memajukan RISMA Al-Ikhlas. Teman-teman mentor SMP YAPIS Bogor. Semoga tetap semangat.
8. Semua pihak yang telah membantu penulis dalam menyelesaikan karya ilmiah ini.
Semoga Allah memberikan sebaik-baik balasan. Penulis berharap karya ilmiah ini dapat bermanfaat terutama bagi penulis dan bagi semua orang.
Bogor, Maret 2007
RIWAYAT HIDUP
Penulis dilahirkan di Bogor, 30 Juni 1983 sebagai anak keenam dari 6 bersaudara dari pasangan Bapak Mustar dan Ibu Badriah.
Pada tahun 1995 penulis menyelesaikan sekolah di SDN Gunung Batu III Bogor dan tahun 1998 penulis menyelesaikan sekolah di SLTPN I Dramaga Bogor. Pada tahun 2001 penulis menyelesaikan sekolah di MAN I Bogor. Dan pada tahun yang sama, penulis diterima di Institut Pertanian Bogor, Departemen Matematika melalui jalur USMI.
DAFTAR ISI
Halaman
DAFTAR TABEL...ix
DAFTAR GAMBAR ...ix
DAFTAR LAMPIRAN ...ix
PENDAHULUAN Latar Belakang ...1
Tujuan...1
LANDASAN TEORI ...1
PEMODELAN Model Pertumbuhan Kontinu ...4
Persamaan Logistik Tak Otonom ...4
Model Pertumbuhan Diskret...4
ANALISIS MODEL Pencarian Solusi ...5
Penentuan Titik Tetap...7
Analisis Kestabilan...8
Contoh Kasus ...9
SIMPULAN ...14
DAFTAR PUSTAKA ...15
DAFTAR TABEL
Halaman
1 Nilai x t
( )
dengan x0 =5000 untuk t=0 sampai dengan t=10 ...102 Nilai x t
( )
dengan x0 =10000 untuk t=0 sampai dengan t=10 ...103 Nilai x n
(
+1)
dengan x0=5000 untuk n=0 sampai dengan n=10...114 Nilai x n
(
+1)
dengan x0 =10000 untuk n=0 sampai dengan n=10...115 Nilai x n
(
+1)
dengan x0=5000 dan h=0.5...126 Nilai x n
(
+1)
dengan x0 =10000 dan h=0.5...13DAFTAR GAMBAR
Halaman 1 Bidang fase dari persamaan logistik...82 Dinamika populasi x t
( )
terhadap dengan t x0 =500...93 Dinamika populasi x t
( )
terhadap dengan t x0 =1100...104 Hubungan n dan x n
(
+1)
untuk x0=5000...115 Hubungan n dan x n
(
+1)
untuk x0 =10000...126 Hubungan n dan x n
(
+1)
untuk x0=5000 dengan h=0.5...137 Hubungan n dan x n
(
+1)
untuk x0 =10000 dengan h=0.5...13DAFTAR LAMPIRAN
Halaman 1 Mencari solusi sistem (3.1) ...162 Mencari solusi sistem (3.2) ...17
3 Pembuktian Teorema ...19
I. PENDAHULUAN
1.1 Latar BelakangPopulasi adalah kumpulan individu dari suatu spesies yang sama yang menempati suatu tempat tertentu. Laju perubahan suatu populasi dapat dipengaruhi oleh empat hal yaitu tingkat kelahiran, tingkat kematian, imigrasi dan emigrasi. Tingkat kelahiran yaitu tingkat dimana adanya individu baru yang lahir melalui proses reproduksi yang dapat menambah jumlah populasi. Tingkat kematian yaitu tingkat dimana adanya individu yang mati dalam suatu populasi. Imigrasi yaitu masuknya individu baru ke dalam suatu populasi. Emigrasi yaitu keluarnya individu dari suatu populasi.
Laju perubahan suatu populasi dapat dimodelkan ke dalam suatu persamaan diferensial yang dapat memprediksikan pertumbuhan suatu populasi secara eksponensial. Terbatasnya sumber-sumber seperti ruang dan makanan dan juga adanya jumlah populasi yang terlalu padat menyebabkan populasi dibatasi oleh suatu daya dukung lingkungan sehingga pertumbuhan populasi lambat laun akan menurun dan akhirnya akan berhenti jika populasi sama dengan daya dukung lingkungan.
Berdasarkan dari segi waktu, model pertumbuhan populasi dapat dibagi menjadi model pertumbuhan kontinu dan model
pertumbuhan diskret. Model pertumbuhan kontinu pertama kali diusulkan oleh Verhulst seorang matematikawan dari Belgia. Dia menyebut model ini sebagai persamaan logistik. Salah satu bentuk variasi dari persamaan logistik yaitu persamaan logistik tak otonom. Pada model ini tingkat pertumbuhan populasi dan daya dukung lingkungannya tergantung pada waktu. Hal ini bisa disebabkan oleh adanya pengaruh tahunan yang mempengaruhi laju perubahan populasi. Salah satunya yaitu disebabkan oleh pengaruh musim.
Pada kehidupan nyata, banyak fenomena perubahan populasi yang terjadi secara diskret. Fenomena ini biasanya dimodelkan dalam bentuk persamaan beda.
1.2 Tujuan
Tujuan dari penulisan karya ilmiah ini adalah:
1. Mempelajari model pertumbuhan populasi kontinu dan model pertumbuhan diskret.
2. Mencari solusi dari model-model pertumbuhan populasi tersebut. 3. Analisis kestabilan solusi diskret dari
model pertumbuhan kontinu dan model pertumbuhan diskret.
II. LANDASAN TEORI
Model Populasi EksponensialMisalkan x t
( )
menunjukkan ukuran populasi pada waktu t, menunjukkan jumlah kelahiran per individu per satuan waktu, danmenunjukkan jumlah kematian per individu per satuan waktu
[
b
m
]
, ,
t t+ ∆ ∆ >t t 0. Maka perubahan populasinya adalah sebagai berikut:
(
) ( )
( )
( )
.x t+ ∆ −t x t =bx t ∆ −t mx t ∆t (2.1) Bagi persamaan (1) dengan ∆t. Jika ∆t mendekati nol, maka diperoleh
( )
( )
dx t rx t
dt = , (2.2) dengan adalah tingkat pertumbuhan intrinsik dari populasi. Model (2.2) menggambarkan populasi akan tumbuh secara
eksponensial jika dan akan menurun secara eksponensial jika .
r= −b m
0
r>
0
r<
(Hallam and Levin, 1986) Definisi 1 [Persamaan Diferensial Biasa] Persamaan diferensial biasa berorde-n adalah suatu persamaan yang mempunyai bentuk umum
( )
(
, , , ,..., n)
0F x y y y′ ′′ y = (2.3) dengan
2 2
,
dy d y
y y
dx dx
′= ′′= , dan seterusnya. (Farlow, 1994) Metode Pemisahan Variabel
Langkah 1. Tulis kembali persamaan
( )
( )
f x dy
dalam bentuk yang terpisah
g y dy
( )
= f x dx( )
. (2.5) Langkah 2. Integralkan masing-masing sisi dari persamaan (2.5), untuk memperoleh solusi implisit.
∫
g y dy( )
=∫
f x dx( )
+c,dengan c adalah suatu konstanta bebas. Langkah 3. Jika mungkin, selesaikan dalam bentuk solusi implisit untuk memperoleh solusi eksplisit.
y
(Farlow, 1994) Definisi 2 [Masalah Nilai Awal]
Masalah nilai awal untuk suatu persamaan diferensial berorde-n
2 2
, , , ,..., 0
n n
dy d y d y
F x y
dx dx dx
⎛ ⎞
= ⎜
⎝ ⎟⎠
mengandung solusi yang akan dicari dari persamaan diferensial tersebut pada suatu interval yang juga memenuhi syarat awal I n
( )
( )
( )
( )
0 0
0 1
0
1 1.
n n
y x y
y x y
y x y
y − y−
=
′ =
′′ =
= M
2 (2.6)
dengan x0∈I dan y y0, 1,....,yn−1 adalah
konstanta yang diberikan.
(
Farlow, 1994) Definisi 3 [Persamaan Diferensial Bernoulli]Suatu persamaan berbentuk
( )
( )
ndy
P x y Q x y
dx+ =
disebut persamaan diferensial Bernoulli. Catatan bahwa jika atau 1, maka persamaan Bernoulli adalah linear.
0
n=
(Rice and Strange, 1994) Teorema 1 [Transformasi persamaan Bernoulli ke dalam persamaan linear]
Jika n≠0 atau 1, maka persamaan Bernoulli
( )
( )
ny′ +P x y=Q x y
dapat direduksi ke persamaan linear dengan mentransformasi v=y1−n.
Bukti:
Langkah pertama, kalikan persamaan diferensial dengan y−n, sehingga diperoleh
( )
1( )
.
n n
y y− ′ +P x y− =Q x Misalkan v=y1−n
,
maka
(
1)
nv′= −n y− y′
atau
. 1
n
y v
n y
′ ′
= −
Substitusikan nilai ini ke dalam persamaan diferensial yang diberikan, sehingga diperoleh
( )
( )
1
v
v P x Q x n
′
+ =
−
yang linear dalam v.
(Rice and Strange, 1994) Definisi 4 [Titik Tetap]
Diberikan sistem persamaan diferensial
( )
, ndx
.
x f x x R
dt = =& ∈ (2.7) Titik x∗ disebut titik tetap jika f x
( )
∗ =0. Titik tetap disebut juga titik kritis atau titik kesetimbangan. Untuk selanjutnya akan digunakan istilah titik tetap.(Tu,1994) Pelinearan
Misalkan x∗ adalah titik tetap, dan misalkan
( )
t x t( )
x η = − ∗adalah suatu perturbasi (gangguan) kecil jauhnya dari x∗. Untuk melihat apakah gangguan tersebut meningkat atau menurun, kita turunkan persamaan diferensial untuk η. Sehingga,
(
)
,d
x x x
dt
η&= − ∗ = &
(2.8) dengan x∗ adalah konstan. Maka,
( )
(
)
.x f x f x
η&= =& = ∗+η (2.9)
Kita gunakan ekspansi Taylor sehingga diperoleh,
(
) ( )
( ) (
2 ,f x∗+η = f x∗ +ηf′ x∗ +O η
)
(2.10) dengan O( )
η2menunjukkan bilangan kuadrat yang nilainya kecil. Catatan bahwa
( )
0f x∗ = , jika x∗ adalah titik tetap. Oleh karena itu, dari persamaan (2.9) dan (2.10) kita peroleh
( ) ( )
2.
f x O
η η&= ′ ∗ + η (2.11)
Jika f′
( )
x∗ ≠0, maka( )
2O η diabaikan dan kita dapat menulis perkiraannya
( )
.f x
η η&= ′ ∗
(2.12) Persamaan (2.12) merupakan persamaan linear dalam η, dan disebut pelinearan sekitar x∗. Hal ini menunjukkan bahwa perturbasi η
( )
t meningkat secara eksponensial jika( )
0f′ x∗ > dan menurun jika f′
( )
x∗ <0. Jika f′( )
x∗ =0, maka O( )
η2diabaikan dan analisis taklinear diperlukan untuk menentukan kestabilan.
Kemiringan f′
( )
x∗ pada titik tetap menentukan kestabilannya. Jika kemiringannya negatif ( f′( )
x∗ <0), maka titik tetap x∗ adalah stabil. Dan jika kemiringannya positif ( f′( )
x∗ >0), maka titik tetap x∗ adalah tidak stabil.(Strogatz, 1994) Definisi 5 [Kestabilan Solusi Dari Persamaan Diferensial Tingkat Satu]
Pandang sistem persamaan diferensial tingkat satu x′ = f x t
( )
, dengan nilai awal( )
0 0x t =x .
Solusinya merupakan fungsi x=x t x t
(
; 0,0)
(
t0≤t)
. Untuk mempelajari kestabilan dari( )
x t pandang solusi yang berdekatan , dengan
(
; 0, 0y=y t x t
)
y′ = f y t( )
, ,( )
0y t =y0. Misalkan z t
( )
=y t( ) ( )
−x t , makaz′ =F z t
( )
, (*) dengan F z t( )
, = f x t(
( )
+z t,)
−f x t t(
( )
,)
Solusi z=0 dari (*) dikatakan
1. Stabil jika ∀ >ε 0 dan t1≥t0,
(
,t1)
z t( )
, t 1δ ε ε
∃ ∋ < ∀ ≥t .
2. Stabil seragam jika stabil dan
( )
δ δ ε= bebas terhadap . t1
3. Stabil asimtotik jika stabil dan
( )
1z t <δ akan mengakibatkan
( )
0z t → untuk t→ ∞.
(Grimshow, 1990) Definisi 6 [Kekontinuan fungsi di Suatu Selang]
Kita katakan fungsi kontinu pada selang terbuka
f
( )
a b, jika f kontinu di setiap titik( )
a b, . f kontinu pada selang tertutup[ ]
a b, jika f kontinu pada(
a b,)
, kontinu kanan didan kontinu kiri di .
a b
(Purcell and Varberg, 1987) Definisi 7 [Fungsi Kontinu Sepotong-sepotong (Piecewise Continuous Function)]
Suatu fungsi dikatakan kontinu sepotong-sepotong pada interval tertutup jika interval dapat dibagi ke dalam sejumlah hingga subinterval terbuka , sehingga
a≤ ≤t b
c< <t d
1. Fungsi adalah kontinu pada tiap subinterval
f
c< <t d.
2. Fungsi mempunyai limit hingga ketika mendekati tiap-tiap titik ujung dari interval tersebut, sehingga
f t
( )
lim
t→c+ f t dan tlim→d− f t
( )
ada.(Rice and Strange, 1994)
Definisi 8 [Persamaan Beda (difference equations)]
Persamaan beda adalah suatu persamaan yang menghubungkan anggota-anggota yang berbeda dari barisan bilangan
{
y y y0, 1, 2,...,yn,...}
dimana nilai daribarisan tidak diketahui nilainya dan nilai tersebut yang akan dicari.
n
y
(Farlow, 1994) Definisi 9 [Limit Barisan]
Misalkan
{ }
1
n n
s ∞= merupakan barisan bilangan real. Kita katakan bahwa sn mendekati limit L (ketika mendekati tak hingga), jika untuk setiap
n
0
ε> terdapat suatu bilangan bulat positif N sehingga,
(
)
.n
s − <L ε n≥N
Jika sn mendekati limit L kita tulis lim n
n→∞s =L atau sn →L
(
n→ ∞)
.(
Goldberg, 1976)Definisi 10 [Kekonvergenan Barisan] Jika barisan bilangan real
{ }
mempunyai limit1
n n
s ∞=
L, kita katakan bahwa
{ }
sn n 1 ∞=
konvergen ke L. Jika
{ }
tidak mempunyai limit, kita katakan bahwa{ }
1
n n
s ∞=
1
n n
s ∞= adalah divergen.
III. PEMODELAN
Model Pertumbuhan KontinuTerbatasnya sumber-sumber penyokong (ruang, air, makanan, dll) menyebabkan populasi dibatasi oleh suatu daya dukung lingkungan. Pertumbuhan populasi lambat laun akan menurun dan akhirnya akan berhenti jika daya dukung lingkungan tercapai. Model dari pertumbuhan populasi tersebut dapat dituliskan sebagai berikut:
1
dx x
rx
dt K
⎛
= ⎜ −
⎝ ⎠
⎞
⎟ (3.1) dengan,
dx
dt : laju perubahan populasi x terhadap waktu t.
x : jumlah populasi suatu spesies pada waktu .
t
0
r> adalah konstanta tingkat pertumbuhan intrinsik.
0
K > adalah daya dukung lingkungan (carrying capacity).
Model ini pertama kali diusulkan oleh Verhulst (1838) yaitu seorang matematikawan dari Belgia. Verhulst menyebut model ini dengan persamaan logistik yang menggambarkan laju perubahan populasi suatu spesies tunggal dengan waktu yang kontinu (Hallam and Levin, 1986).
Persamaan Logistik Tak Otonom
Salah satu bentuk variasi dari persamaan logistik (1.1) yaitu persamaan logistik tak otonom, yang artinya secara eksplisit variabel
muncul dalam persamaan. Modelnya adalah sebagai berikut:
t
( ) ( )
1 x t( )
( )
, dxr t x t t
dt K t
⎡ ⎤
= ⎢ − ⎥
⎢ ⎥
⎣ ⎦ >0 (3.2)
dengan, dx
dt : laju perubahan populasi x pada waktu . t
( )
x t : jumlah populasi suatu spesies pada waktu t>0.
( )
0r t ≥ : tingkat pertumbuhan populasi x pada waktu t
( )
K t
:
daya dukung lingkungan yang merupakan fungsi kontinu positif (carrying capacity).Model ini dinamakan persamaan logistik tak otonom karena tingkat pertumbuhan intrinsik
( )
r , carrying capacity( )
K dan jumlah populasi( )
x merupakan suatu fungsi yang tergantung pada waktu. Hal ini terjadi disebabkan karena adanya pengaruh tahunan yang mempengaruhi laju perubahan populasi tersebut. Salah satunya yaitu adanya pengaruh musim.Model Pertumbuhan Diskret
Fenomena-fenomena perubahan populasi yang terjadi secara kontinu dapat dimodelkan ke dalam suatu persamaan diferensial yang dapat memprediksikan laju perubahan populasi tersebut di masa yang akan datang. Seperti pada model (1.1). Tetapi, banyak juga fenomena perubahan populasi yang terjadi secara diskret. Fenomena ini biasanya dimodelkan ke dalam suatu persamaan beda. Hal ini digambarkan oleh persamaan berikut:
( )
k(
( )
)
, k, 1, 2,...x t I x t t τ k
∆ = = = (3.3)
(
k 1) ( )
k k(
( )
k)
,xτ + −x τ =I x τ k=1, 2,...
dengan,
( )
x t
∆ : perubahan populasi x terhadap waktu .
t
k
I : operator yang terbatas.
k
τ : waktu ke- . k
IV. ANALISIS MODEL
Model (3.1) menggambarkan lajuperubahan populasi suatu spesies tunggal dengan waktu yang kontinu. Ada beberapa komponen yang mempengaruhi laju perubahan populasi tersebut yaitu jumlah
( )
Klingkungan yang dipengaruhi oleh sumber-sumber penyokong yang tersedia.
Jika sumber makanan yang tersedia berlimpah maka populasi akan meningkat. Jika hal ini berlangsung terus, maka populasi yang terlalu besar akan menyebabkan terjadinya persaingan antar spesies untuk mendapatkan makanan yang sama. Sehingga lama kelamaan makanan yang tersedia akan menurun dan menyebabkan jumlah populasi menurun. Hal ini bisa mengakibatkan jumlah kematian akan meningkat. Dan jika tingkat produktivitasnya menurun, maka lambat laun pertumbuhan populasi akan lambat bahkan berhenti.
Jika jumlah populasi x lebih besar dari daya dukung lingkungan maka tingkat pertumbuhan populasi akan menurun dan populasi menuju ke arah daya dukung lingkungan
,
K
.
K Dan jika jumlah populasi x lebih kecil dari maka tingkat pertumbuhan populasi akan meningkat dan populasi menuju ke arah daya dukung lingkungan
,
K
.
K
Model (3.2) merupakan bentuk variasi dari persamaan logistik (3.1). Pada model (3.1), tingkat pertumbuhan intrinsik dan daya dukung lingkungan merupakan konstanta positif. Sedangkan pada model (3.2), dan r
K merupakan suatu fungsi dari waktu. Sehingga, model (3.2) ini dinamakan persamaan logistik tak otonom, karena r dan
K tergantung pada waktu.
Adanya perbedaan musim yang terjadi pada suatu wilayah atau tempat bisa menjadi salah satu sebab adanya perbedaan tingkat pertumbuhan dan daya dukung lingkungan menurut waktu tertentu. Misalnya saja pada musim kemarau suatu spesies tertentu mengalami kekurangan makanan dan air disebabkan kekeringan. Hal ini bisa menyebabkan angka kematian spesies tersebut menjadi tinggi karena ketergantungan spesies tersebut pada sumber makanan dan air. Tentu saja kondisi ini akan berbeda ketika berada pada musim-musim yang lain. Dimana angka kematian dan angka kelahiran bisa berubah-ubah sesuai dengan musim tertentu. Dan juga perbedaan musim ini bisa menyebabkan daya dukung lingkungannya berbeda-beda juga. Sehingga menyebabkan populasi tersebut mengalami fluktuasi.
Banyak populasi binatang yang mengalami fluktuasi secara musiman dengan penurunan populasi pada musim dingin, titik rendah pada musim semi, kenaikan pada musim panas dan titik yang tinggi pada musim gugur. Misalnya saja populasi burung puyuh
di California, Lophortyc californicus yang mengalami penurunan pada musim dingin dan musim semi dan kenaikan yang tiba-tiba pada bulan Juni ketika anak-anaknya muncul. (Sladen and Bang, 1969).
Model (3.1) dan (3.2) menggambarkan laju perubahan populasi suatu spesies tanpa adanya pemanenan. Artinya, tidak ada pengaruh dari luar (seperti perburuan, pemancingan, dll) yang mempengaruhi laju perubahan populasi tersebut.
Model (3.3) menggambarkan fenomena perubahan populasi yang terjadi secara diskret. Ada beberapa spesies hewan yang biasanya mengalami proses kelahiran dan masa kawin setiap satu tahun sekali, sehingga ukuran populasi hewan tersebut dihitung setiap satu tahun sekali. Oleh karena itu, model ini merupakan model yang sesuai untuk memprediksikan fenomena perubahan populasi yang dihitung secara tahunan.
4.1 Pencarian Solusi
A. Mencari Solusi Persamaan (3.1) Solusi dari sistem (3.1) adalah sebagai berikut:
( )
(
0)
0 1
rt rt
Kx e x t
K x e
=
+ − .
[Uraian lebih lengkap dapat dilihat di lampiran 1].
B. Mencari Solusi Persamaan (3.2) Persamaan (3.2) merupakan persamaan logistik tak otonom yang berarti fungsi dan r
K tergantung pada waktu. Model (3.2) merupakan salah satu model yang sulit diselesaikan secara eksplisit. Oleh karena itu, untuk mendapatkan solusi dari sistem (3.2) diperlukan adanya suatu metode yaitu dengan menggunakan metode perkiraan. Solusi yang akan diperoleh dari persamaan ini yaitu dalam bentuk diskret.
Model (3.2) merupakan tipe-Bernoulli dan persamaan ini dapat diselesaikan jika dan
r K adalah kontinu sepotong-sepotong (piecewise continuous) pada yang setiap bagiannya merupakan fungsi konstan. (Hallam and Levin, 1986). Berdasarkan definisi kontinu sepotong-sepotong (Rice and Strange, 1994), maka kita dapat membagi interval
[
0,)
R+= ∞
[
0,∞)
ke dalam sejumlah hingga subinterval terbuka c< <t d, sehingga fungsidan fungsi
ketika mendekati tiap-tiap titik ujung dari interval tersebut, sehingga
t
lim
( )
dant c
r t
+
→ tlimd
( )
r t
−
→ ada.
lim
( )
t→c+K t dan tlim→d−K t
( )
ada.Untuk mencari solusi sistem (3.2), fungsi dan fungsi
r K didekati dengan fungsi bilangan bulat terbesar, yang merupakan fungsi kontinu sepotong-sepotong. Sehingga t pada fungsi dan r K kita ganti menjadi t
h ,
dengan yang menunjukkan ukuran langkah.
0
h>
Persamaan (3.2) menjadi
( )
( )
(
)
)
0,
, 1 , , k
t r h x t
h
dx t
x t r h
dt h t
K h
h
t nh n h n n
h τ + ⎛ ⎛ ⎞ ⎜ ⎛ ⎞ ⎜ ⎟ ⎝ ⎠ ⎜ ⎟ = ⎜ ⎟− ⎜ ⎝ ⎠ ⎛ ⎞ ⎟ ⎜ ⎜ ⎟ ⎟ ⎝ ⎠ ⎝ ⎠ ∈⎡⎣ + ∈ Ζ ≠ ⎞ ⎟ (4.1) t h
merupakan bilangan bulat terbesar yang kurang dari atau sama dengan t
h . Artinya,
(
)
1 1 .
t t
n n n
h h
nh t n h
= ↔ ≤ < +
≤ < +
Jadi, t berada pada interval ⎡⎣nh n,
(
+1)
h)
dengan n∈ Ζ0+.
Jika kita uraikan, maka diperoleh beberapa subinterval:
0 ; 0
1 ; 2
2 ; 2 3 .
3 ;3 4
t h
h t h
t
n h t
h
h t h
≤ < ⎧
⎪ ≤ < ⎪⎪
= =⎨ ≤ <
⎪ ≤ <
⎪ ⎪⎩ M h
Lemma. Fungsi r dan K yang didefinisikan seperti diatas adalah fungsi yang kontinu sepotong-sepotong.
Bukti:
Untuk membuktikan bahwa dengan menggunakan fungsi bilangan bulat terbesar pada fungsi dan r K, akan kita dapatkan fungsi r dan K yang kontinu sepotong-sepotong, maka pertama kali yang harus kita
buktikan adalah r dan K kontinu pada tiap subinterval terbuka diatas.
1) Untuk interval 0≤ <t h
( ) ( )
( ) ( )
( ) (
0. 0. 0
lim . 0. 0
lim . 0. 0
t
t h
t
r h r h r
h
t
r h r h r
h
t
r h r h r
h + − → → ⎛ ⎞ = = ⎜ ⎟ ⎝ ⎠ ⎛ ⎞ = = ⎜ ⎟ ⎝ ⎠ ⎛ ⎞= = ⎜ ⎟ ⎝ ⎠
)
( )
( )
0lim . 0
lim . 0 .
t
t h
t
r h r
h
t
r h r
h + − → → ⎛ ⎞ ∴ ⎜ ⎟= ⎝ ⎠ ⎛ ⎞ = ⎜ ⎟ ⎝ ⎠
2) Untuk interval h≤ <t 2h r t .h r
( )
1.h r( )
h ⎛ ⎞= = ⎜ ⎟ ⎝ ⎠
h
( ) ( )
( ) ( )
2lim . 1.
lim . 1.
t h
t h
t
r h r h r h
h
t
r h r h r
h + − → → ⎛ ⎞= = ⎜ ⎟ ⎝ ⎠ ⎛ ⎞ = = ⎜ ⎟ ⎝ ⎠
h
( )
( )
2lim .
lim . .
t h
t h
t
r h r h
h
t
r h r h
h + − → → ⎛ ⎞ ∴ ⎜ ⎟= ⎝ ⎠ ⎛ ⎞ = ⎜ ⎟ ⎝ ⎠
dan seterusnya untuk interval-interval berikutnya. Begitu pula pada fungsi K, kita buktikan bahwa fungsi K kontinu pada tiap subinterval.
1) Untuk interval 0≤ <t h
( )
( )
( )
( )
( )
( )
0
. 0. 0
lim . 0. 0
lim . 0. 0 .
t
t h
t
K h K h K
h
t
K h K h K
h
t
K h K h K
h + − → → ⎛ ⎞ = = ⎜ ⎟ ⎝ ⎠ ⎛ ⎞= = ⎜ ⎟ ⎝ ⎠ ⎛ ⎞ = = ⎜ ⎟ ⎝ ⎠
2) Untuk interval h≤ <t 2h
( )
( )
( )
( )
( )
( )
2
. 1.
lim . 1.
lim . 1. ,
t h
t h
t
K h K h K h
h
t
K h K h K h
h
t
K h K h K h
h + − → → ⎛ ⎞= = ⎜ ⎟ ⎝ ⎠ ⎛ ⎞ = = ⎜ ⎟ ⎝ ⎠ ⎛ ⎞ = = ⎜ ⎟ ⎝ ⎠
dan seterusnya untuk interval-interval berikutnya. Jadi, terbukti bahwa fungsi dan fungsi
Selanjutnya, kita buktikan bahwa lim
( )
t→c+r t dan tlim→d−r t
( )
ada.lim
( )
t c
K t
+
→ dan tlimd
( )
K t
−
→ ada.
1)Untuk interval 0≤ <t h
( )
( )
0 lim 0 lim 0 t t h tr h r
h
t
r h r
h + − → → ⎛ ⎞= ⎜ ⎟ ⎝ ⎠ ⎛ ⎞= ⎜ ⎟ ⎝ ⎠
( )
( )
0 lim 0lim 0 .
t
t h
t
K h K
h
t
K h K
h + − → → ⎛ ⎞ = ⎜ ⎟ ⎝ ⎠ ⎛ ⎞ = ⎜ ⎟ ⎝ ⎠
2)Untuk interval h≤ <t 2h
lim
( ) ( )
1.t h
t
r h r h r
h + → ⎛ ⎞ = = ⎜ ⎟ ⎝ ⎠
h
( ) ( )
2
lim 1.
t h
t
r h r h r h
h − → ⎛ ⎞ = = ⎜ ⎟ ⎝ ⎠
( )
( )
2 lim lim , t h t h tK h K h
h
t
K h K h
h + − → → ⎛ ⎞ = ⎜ ⎟ ⎝ ⎠ ⎛ ⎞ = ⎜ ⎟ ⎝ ⎠
dan seterusnya untuk interval–interval berikutnya dapat kita buktikan bahwa nilai limit kiri dan limit kanannya ada.
Karena t n h =
,
maka dari persamaan (4.1) diperoleh
( ) ( ) ( ) ( )
( )
.r nh x t dx
x t r nh
dt K nh
⎡ ⎤
= ⎢ − ⎥
⎢ ⎥
⎣ ⎦
Untuk menyederhanakan penulisan, maka kita tulis:
( ) ( )
( )
( ) ( )
2(
)
)
, , 1
r n dx
r n x t x t t nh n h
dt = −K n ∈⎡⎣ + .
(4.2) dengan, r n
( ) ( )
=r nh dan K n( )
=K nh( )
. Sehingga solusi dari persamaan (3.22) adalah sebagai berikut:(
)
( )( )
( )
( )( )
1 1 1r n h r n h
e x n x n
x n e
K n + = ⎡ − ⎤ ⎣ ⎦ + . (4.3) [Uraian lebih lengkap dapat dilihat di lampiran 2].
C. Mencari Solusi Persamaan (3.3)
Begitu pula untuk persamaan (3.3), kita pilih fungsi x adalah fungsi bilangan bulat terbesar, sehingga τk pada fungsi x kita
ganti menjadi
k , 1, 2,..
k m k h τ = = .
k h τ
merupakan bilangan bulat terbesar yang
kurang dari atau sama dengan k.
h τ Artinya,
(
)
1 1 . k kk k k
k k k
m m m
h h
hm m h
τ τ
τ
= ⇔ ≤ < +
≤ < +
Jadi, τk berada pada interval
(
)
)
, 1
k k
hm m + h
⎡⎣ ,dengan mk∈ Ζ+.
Jika kita uraikan, maka diperoleh
1 ; 2 2 ; 2 3 3 ;3 4
k k k k k h h h h m h h h τ τ τ τ ≤ < ⎧
⎪ ≤ <
⎪ = = ⎨ ≤ < ⎪ ⎪⎩ M
Dari persamaan (3.3)
( )
(
( )
)
(
) ( )
(
( )
)
, , 1, 2,...
1 .
k k
k k k k
x t I x t t k
x x I x
τ
τ τ τ
∆ = = =
+ − =
sehingga diperoleh,
1 , 1,2,..
k k k
k
x h x h I x h k
h h h
τ τ τ ⎛⎛ ⎞ ⎞ ⎛ ⎞ ⎛ ⎞ + = + = ⎜⎜ ⎟ ⎟ ⎜ ⎟ ⎜ ⎟ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ . (4.4) Karena k
k m h τ =
, maka
x
(
(
mk+1)
h)
=x m h(
k)
+Ik(
x m h(
k)
)
.Dinotasikan x m
( )
k =x m h(
k)
, sehingga solusidari sistem (3.3) adalah sebagai berikut:
x m
(
k+ =1)
x m( )
k +Ik(
x m(
k)
)
. (4.5)4
.
2 Penentuan titik tetapTitik tetap pada persamaan (3.1) dapat diperoleh dengan menentukan persamaan
0
dx
dt = , sehingga dari persamaan (3.1) diperoleh:
1 x 0
rx K
⎛ − ⎞=
⎜ ⎟
0
rx= atau 1 x 0
K
− =
0
x= atau x=K (4.6) Berdasarkan persamaan (4.6) maka diperoleh 2 titik tetap untuk persamaan (3.1) yaitu x∗ =0 atau x∗ =K.
4.3 Analisis Kestabilan
4.3.1 Analisis kestabilan titik tetap pada sistem (3.1)
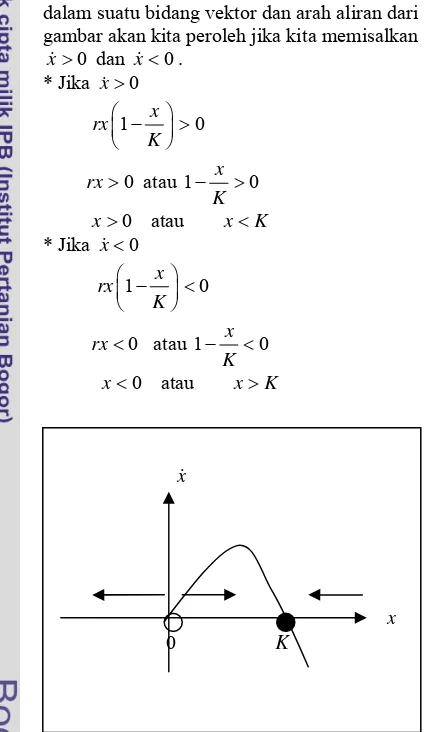
1). Dengan menggunakan gambar
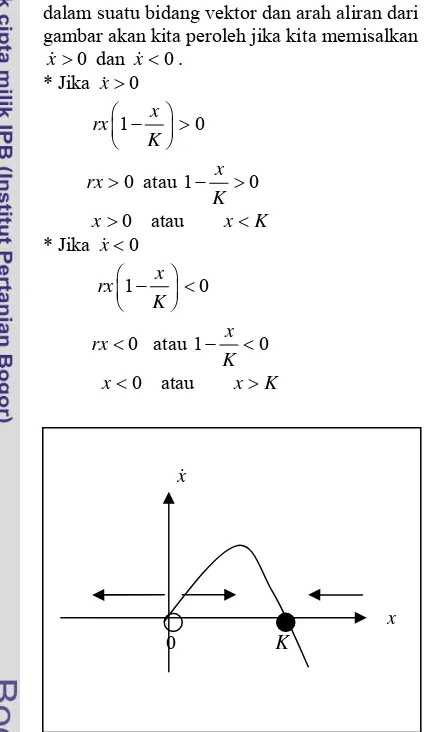
Untuk menentukan kestabilan dari titik tetap diatas, kita gambar persamaan (3.1) ke dalam suatu bidang vektor dan arah aliran dari gambar akan kita peroleh jika kita memisalkan
dan .
0
x&> x&<0
* Jika x&>0
rx 1 x 0 K
⎛ − ⎞>
⎜ ⎟
⎝ ⎠
rx>0 atau 1 x 0
K
− >
x>0 atau x<K * Jika x&<0
rx 1 x 0 K
⎛ − ⎞<
⎜ ⎟
⎝ ⎠
rx<0 atau 1 x 0
K
− <
x<0 atau x>K
x&
x 0 K
Grafik 1 Bidang fase dari persamaan logistik. Arah aliran ke kanan jika dan arah aliran ke kiri jika . Jadi, titik tetap merupakan titik tetap tidak stabil, karena arahnya menjauhi titik tersebut. Dan titik tetap
0
x&>
0
x&<
0 x∗ =
x∗ =K merupakan titik tetap stabil karena arahnya menuju titik tersebut.
Titik tetap stabil digambarkan dengan bulatan penuh dan titik tetap tidak stabil digambarkan dengan bulatan tidak penuh.
2). Dengan cara pelinearan
Kestabilan titik tetap pada sistem (3.1) dapat juga ditentukan dengan cara pelinearan.
Dari persamaan (3.1),
( )
1 x ,f x rx K
⎛
= ⎜ −
⎝ ⎠
⎞
⎟ dengan titik tetap x∗ =0 dan x∗ =K . Maka, f
( )
x r 2rxK
′ = − .
• Untuk titik tetap x∗= ⇒0 f′
( )
0 =r.• Untuk titik tetap
( )
x∗ =K ⇒ f′ K = −r.
Oleh karena itu, x∗=0 merupakan titik tetap tidak stabil, karena f′
( )
x∗ >0. Dan x∗=K merupakan titik tetap stabil, karena( )
0f′ x∗ < .
Berdasarkan dari 2 cara diatas, dapat disimpulkan bahwa titik tetap x∗ =0 merupakan titik tetap tidak stabil. Titik tetap
0
x∗ = mempunyai arti bahwa pada titik tersebut tidak ada individu yang bereproduksi (laju perubahannya nol), sehingga populasi akan tumbuh dan akan menjauhi titik tersebut. Titik tetap x∗=K merupakan titik tetap stabil, artinya jumlah populasi akan selalu mendekati titik tersebut yaitu mendekati daya dukung lingkungan.
4.3.2 Analisis kestabilan solusi pada sistem (3.1)
Solusi yang telah diperoleh pada model (3.1) merupakan solusi yang stabil. Hal ini bisa ditunjukkan sebagai berikut:
( )
(
0)
00 0
0
0 0 0
lim lim lim
1
.
rt rt
t t t
rt rt
Kx e Kx
x t
x K
K x e x
e e
Kx
K x K
x
→∞ = →∞ + − = →∞
+ −
= =
+ −
∞ ∞
Karena x t
( )
→K (menuju solusi keseimbangan yang stabil) ketika , maka solusit→ ∞
( )
x t adalah stabil.
4.3.3 Analisis kestabilan solusi dari sistem (3.2) dan (3.3)
Kestabilan dari solusi diskret yang telah diperoleh pada sistem (3.2) dan (3.3) merupakan stabil asimtotik . Hal ini dapat ditunjukkan oleh teorema berikut:
( )
( )
0 0
0, , sup ,
n
r n n + R r n
∈Ζ
≥ ∈ Ζ = < ∞
( )
( )
<∞ ≤<
Ζ ∈ Ζ
∈ K n K n
K
n n
0 0
sup , inf
0 * ,
( )
(
k)
(
kk xm cxm
I =
)
dengan Maka untuk memenuhi pertidaksamaan dan suatu solusi dari (4.4) yang sesuai untuk
memenuhi pertidaksamaan
. 0
>
c h>0
(
c)
R h≤ln1+ /( )
nx
( )
0 >0x
( ) ( )
( )
( )
( )
( )
1 1
0 1 1
1 1 1
exp exp
0
r n j h j
n n
i j
e
r i h r n h
x n x K n j
− − − −
= = =
⎛ ⎞
−
⎛ ⎞
≤ ⎜− ⎟+ ⎜− −
−
⎝
∑
⎠∑
⎝∑
l ⎠l (4.7) Bukti:
Lihat di lampiran 3
Teorema 2. Misalkan semua asumsi dari Teorema 1 terpenuhi dan misalkan terdapat suatu bilangan L>0 sehingga
(
)
1
1
lim ,
m m
j
r n j L m
m
+ →∞ =
⎧ ⎫
− = ∈ Ζ
⎨ ⎬
⎩
∑
⎭ , seragampada n∈ Ζ.
(4.8) Maka solusi x
( )
n dari sistem (4.4) menuju ke( )
x∗ n ketika n→∞, dimana x∗
( )
n diberikan sebagai berikut( )
(
( ))
(
)
1 1
1 1
1
exp
r n j h j
j
e
x n r n h
K n j
− − − −
∞ ∗
= =
⎡ − ⎛ ⎞⎤
=⎢ − ⎜− ⎟⎥
⎢ ⎝ ⎠⎥
⎣
∑
∑
l ⎦l −
sehingga x n
( )
−x∗( )
n →0 ketika n→∞. Bukti: Lihat di lampiran 3
4.4 Contoh Kasus
4.4.1 Contoh Kasus pada Model (3.1) Untuk x0 =0, x0 =K x, 0<K x, 0 >K.
1) Misalkan r=0.1,x0 =0
dan
K=1000
( )
0 0.1 0 1
1000 0
dx dt
⎡ ⎤
= ⎢ − ⎥
⎣ ⎦
=
2) Misalkan r=0.1,x0 =1000dan K =1000
(
)
1000 0.1 1000 1
1000 0
dx dt
⎡ ⎤
= ⎢ − ⎥
⎣ ⎦
=
Artinya bahwa, jika populasi awalnya 0, maka populasi akan tetap konstan (laju perubahan populasi sama dengan nol). Begitu pula jika populasi awalnya x0 =K, maka
populasi akan tetap konstan.
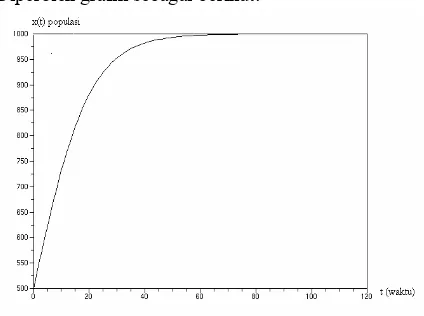
3) Untuk kasus x0 <K misalkan x0 =500
,
r0 =0.1,K=1000
( )
( )
500 0.1 500 1
1000 25
1 500 25 525 dx
dt
x
⎡ ⎤
= ⎢ − ⎥
⎣ ⎦
=
= + =
Dengan menggunakan program Scilab: --> function xdot=f(t,x)
--> xdot=r*x*(1-x/K); --> endfunction --> t=0:110; --> r=0.1; --> K=1000;
--> x=ode (500,0.0,t,f); --> xbasc();plot2d(t,x)
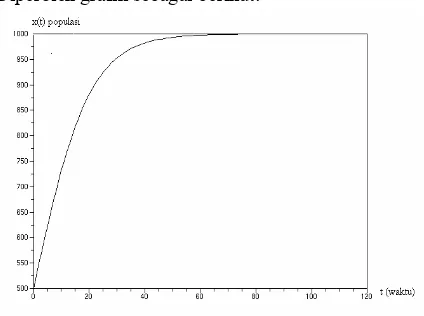
Diperoleh grafik sebagai berikut:
Grafik 2 Dinamika populasi x t
( )
terhadap dengant
0 500
x = .
Berdasarkan grafik diatas dapat kita lihat bahwa ketika x0 <K, jumlah populasi x t
( )
akan terus meningkat menuju daya dukung lingkungannya. Tetapi, nilai x t
( )
tidak akan melebihi daya dukung lingkungannya.4) Untuk kasus populasi awal lebih besar dari daya dukung lingkungan (x0>K
),
misalkan0 1100
x =
(
)
( )
1100 0.1 1100 1
1000 11
1 1100 11 1089. dx
dt
x
⎡ ⎤
= ⎢ − ⎥
⎣ ⎦
= −
= − =
Dari contoh 4 ini dapat kita lihat bahwa jika
0
menurun dan akan menuju daya dukung lingkungannya. Hal ini dapat kita lihat pada grafik berikut:
Dengan menggunakan program scilab: --> function xdot=f(t,x)
--> xdot=r*x*(1-x/K); --> endfunction --> t=0:50; --> r=0.1; --> K=1000;
--> x=ode (1100,0.0,t,f); --> xbasc();plot2d(t,x)
Diperoleh grafik sebagai berikut:
Grafik 3 Dinamika populasi x t
( )
terhadapt dengan x0=1100.
4.4.2 Contoh Kasus pada Model (3.2) 1) Misalkan
( )
0.2 ,( )
10 5000, 0 0.r t = t K t = t+ x =
(
) ( )
( )
( )
(
)
( )
0.2 1
10 5000 0 0.2 0 0 1
5000 0
x t dx
t x t
dt t
⎡ ⎤
= ⎢ − ⎥
+
⎣ ⎦
⎡ ⎤
= ⎢ − ⎥
⎣ ⎦
=
Ini artinya bahwa jika populasi awalnya 0, maka populasi akan tetap konstan (laju perubahan populasi sama dengan nol). Jika populasi awalnya , maka populasi akan tetap konstan.
( )
0 0
x =K
2) Misalkan
( )
0.2 ,( )
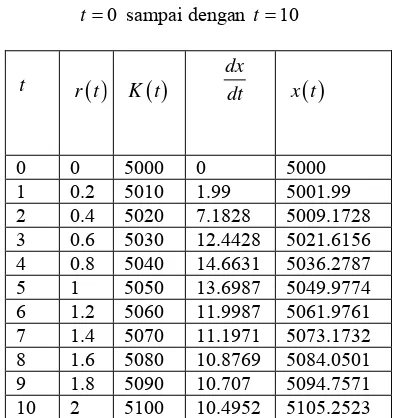
10 5000, 0 5000.r t = t K t = t+ x =
Tabel 1 Nilai x t
( )
dengan x0 =5000 untuk0
t= sampai dengan t=10
t r t
( )
K t( )
dx
dt x t
( )
0 0 5000 0 5000
1 0.2 5010 1.99 5001.99 2 0.4 5020 7.1828 5009.1728 3 0.6 5030 12.4428 5021.6156 4 0.8 5040 14.6631 5036.2787 5 1 5050 13.6987 5049.9774 6 1.2 5060 11.9987 5061.9761 7 1.4 5070 11.1971 5073.1732 8 1.6 5080 10.8769 5084.0501 9 1.8 5090 10.707 5094.7571 10 2 5100 10.4952 5105.2523
3) Misalkan
( )
0.2 ,( )
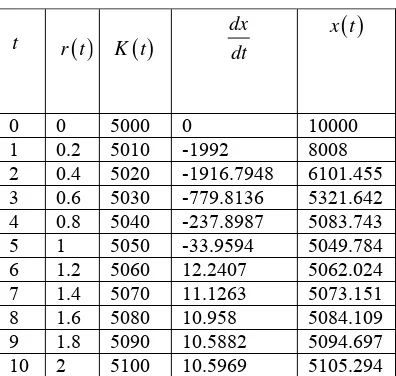
10 5000, 0 10000.r t = t K t = t+ x =
Tabel 2 Nilai x t
( )
dengan x0 =10000 untuk0
t= sampai dengan t=10
t r t
( )
K t( )
dx dt
( )
x t
0 0 5000 0 10000
1 0.2 5010 -1992 8008
2 0.4 5020 -1916.7948 6101.455 3 0.6 5030 -779.8136 5321.642 4 0.8 5040 -237.8987 5083.743 5 1 5050 -33.9594 5049.784 6 1.2 5060 12.2407 5062.024 7 1.4 5070 11.1263 5073.151 8 1.6 5080 10.958 5084.109 9 1.8 5090 10.5882 5094.697 10 2 5100 10.5969 5105.294 4) Solusi yang telah diperoleh pada model
(3.2) adalah sebagai berikut:
(
(
)
)
( )
( )
( )
( )( )
1
1 1
r nh h r nh h
e x nh
x n h
x nh e
K nh
+ =
⎡ − ⎤
⎣ ⎦ +
.
A. Misalkan
[
0,10]
10 0 1 100; 0 1 1; 1 2 2; 2 3
3;3 4
4; 4 5
5;5 6
1
6; 6 7 7 ; 7 8
8;8 9
9;9 10 10;10 11
t t t t t t
n t
t t t t t
≤ < ⎧
⎪ ≤ < ⎪
⎪ ≤ < ⎪
≤ < ⎪
⎪ ≤ < ⎪
= =⎨ ≤ < ⎪ ≤ < ⎪
≤ < ⎪
⎪ ≤ < ⎪
⎪ ≤ < ⎪
≤ < ⎩
a) Misalkan
( )
0.2( ) ( )
0.2 ( 1)r t = t⇔r nh =r n = n h=
( )
( )
( )
( )
( )
( )
( )
( )
0 0 0 0 0
1 1 0.2 1 0.2
2 2 0.4 2 0.4
1 1
0.1 0 0
2 2
1 1
2 2 0.5 2 0.4
2 2
t r r
t r r
t r r
t r r
t r r
= ⇒ = ⇔ =
= ⇒ = =
= ⇒ = =
⎛ ⎞
= ⇒ ⎜ ⎟= =
⎝ ⎠
⎛ ⎞
= ⇒ ⎜ ⎟= =
⎝ ⎠
M
b) Misalkan
( )
10 5000( )
10 5000 ( 1) K t = t+ ⇔K nh = n+ h=( )
( )
( )
( )
( )
( )
( )
( )
0 0 5000 0 5000
1 1 5010 1 5010
2 2 5020 2 5020
1 1
5005 0 5000
2 2
1 1
2 2 5025 2 5020
2 2
t K K
t K K
t K K
t K K
t K K
= ⇒ = ⇔ =
= ⇒ = =
= ⇒ = =
⎛ ⎞
= ⇒ ⎜ ⎟= =
⎝ ⎠
⎛ ⎞
= ⇒ ⎜ ⎟= =
⎝ ⎠
M
c) Misalkan
( ) ( )
0.2 ,( )
( )
10 5000r nh =r n = n K nh =K n = n+
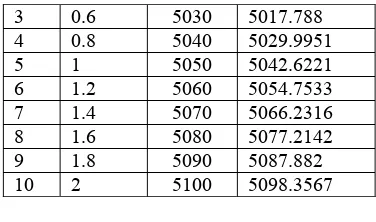
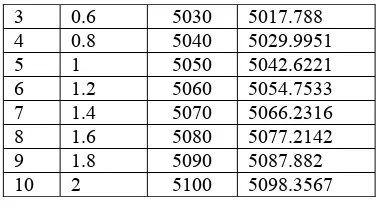
dan x0 =5000.
Tabel 3 Nilai x n
(
+1)
dengan x0 =5000untuk n=0 sampai dengan n=10
n r n
( )
K n( )
x n(
+1)
0 0 5000 5000
1 0.2 5010 5001.87
2 0.4 5020 5007.7925
3 0.6 5030 5017.788
4 0.8 5040 5029.9951
5 1 5050 5042.6221
6 1.2 5060 5054.7533
7 1.4 5070 5066.2316
8 1.6 5080 5077.2142
9 1.8 5090 5087.882
10 2 5100 5098.3567
Dari data diatas dapat kita lihat bahwa, dengan bertambahnya nilai n, maka nilai
(
1)
x n+ semakin meningkat. Tetapi, nilai
(
1)
x n+ untuk masing-masing nilai n tidak melebihi nilai K n
( )
untuk masing-masing nilai . Artinya bahwa, populasi tidak akan melebihi masing-masing daya dukung lingkungannya.n
4980 5000 5020 5040 5060 5080 5100 5120
0 5 10 15
n
x(
n
+
1
)
x(n+1)
Grafik 4 Hubungan dan n x n
(
+1)
untuk( )
0 5000.x =
d) Misalkan
( )
0.2 ,( )
10 5000, 0 10000.r nh = n K n = n+ x =
Tabel 4 Nilai x n
(
+1)
dengan untuk0 10000
x = 0
n= sampai dengan n=10 n r n
( )
K n( )
x n(
+1)
0 0 5000 10000
1 0.2 5010 8470.6601 2 0.4 5020 6905.7135 3 0.6 5030 5910.8941 4 0.8 5040 5397.3175
5 1 5050 5172.4472
9 1.8 5090 5088.2015
10 2 5100 5098.4001
Dari tabel 4 diatas dapat kita lihat bahwa pada saat n=0 sampai n=7 nilai x n
(
+1)
mengalami penurunan dan setelah n=7, nilai(
1)
x n+ mengalami kenaikan. Hal ini berarti bahwa, populasi mengalami fluktuasi dan ketika populasi awalnya melebihi daya dukung lingkungannya, maka populasi akan menurun mendekati daya dukung lingkungannya tetapi tidak akan melebihi daya dukung lingkungannya.
0 2000 4000 6000 8000 10000 12000
0 5 10 15
n
x(
n+
1
)
x(n+1)
Grafik 5 Hubungan dan n x n
(
+1)
dengan( )
0 10000.x =
B. Misalkan
(
)
)
0.5 0.5 , 1 0.5
h= ⇒ ∈t ⎡⎣ n n+ Maka,
0; 0 0.5 1; 0.5 1
2; 1 1.5 3;1.5 2 4; 2 2.5 5; 2.5 3 0.5
6;3 3.5 7 ;3.5 4 8; 4 4.5 9; 4.5 5 10;5 5.5
t t t
t t t
n t
t t t
t t
≤ < ⎧
⎪ ≤ < ⎪
⎪ ≤ < ⎪ ≤ < ⎪
⎪ ≤ < ⎪
= ⎨ ≤
⎪ ≤ < ⎪
≤ < ⎪
⎪ ≤ < ⎪
⎪ ≤ <
⎪
≤ < ⎩
<
a) Misalkan
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
0.2 0.2 ( 0.5)
0 0 0 0 0
1 1 0.2 1 0.2
2 2 0.4 2 0.4
1 1
0.1 0.5 0.1
2 2
1 1
2 2 0.5 2.5 0.5
2 2
r t t r nh nh h
t r r
t r r
t r r
t r r
t r r
= ⇔ = =
= ⇒ = =
= ⇒ = =
= ⇒ = =
⎛ ⎞
= ⇒ ⎜ ⎟= =
⎝ ⎠
⎛ ⎞
= ⇒ ⎜ ⎟= =
⎝ ⎠
b) Misalkan
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
10 5000 10 5000
0 0 5000 0 5000
1 1 5010 1 5010
2 2 5020 2 5020
0.5 0.5 5005 0.5 5005
2.5 2.5 5025 2.5 5025
K t t K nh nh
t K K
t K K
t K K
t K K
t K K
= + ⇔ = +
= ⇒ = =
= ⇒ = =
= ⇒ = =
= ⇒ = =
= ⇒ = =
c) Misalkan
( )
( )
(
)
(
)
0
0.2 , 10 5000, 5000
0.5 0.5 0.1
0.5 5 5000
r nh nh K nh nh x
h r n n
K n n
= = +
= ⇒ =
= +
=
Tabel 5 Nilai x n
(
+1)
dengan dan0 5000
x =
0.5
h= untuk sampai dengan
0
n=
20
n=
n r
(
0.5n)
K(
0.5n)
x(
(
n+1)
h)
0 0 5000 5000
1 0.1 5005 5000.2439
2 0.2 5010 5001.1707
3 0.3 5015 5003.0924
4 0.4 5020 5006.1488
5 0.5 5025 5010.3065
6 0.6 5030 5015.3959
7 0.7 5035 5021.1693
8 0.8 5040 5027.3618
9 0.9 5045 5033.7391
10 1 5050 5040.1247
11 1.1 5055 5046.407
12 1.2 5060 5052.5309
13 1.3 5065 5058.4829
14 1.4 5070 5064.2742
15 1.5 5075 5069.9278
16 1.6 5080 5075.4693
18 1.8 5090 5086.3053
19 1.9 5095 5091.6339
20 2 5100 5096.919
Dari data diatas dapat kita lihat bahwa, dengan bertambahnya nilai , maka nilai n
(
1)
x n+ semakin meningkat. Tetapi, nilai
(
1)
x n+ untuk masing-masing nilai tidak melebihi nilai
n
( )
K n untuk masing-masing nilai . Artinya bahwa, populasi tidak akan melebihi masing-masing daya dukung lingkungannya.
n
4980 5000 5020 5040 5060 5080 5100 5120
0 5 10 15 20 25
n
x(
n
+
1
)
x(n+1)
Grafik 6 Hubungan dan n x n
(
+1)
untuk( )
0 5000.x =
d) Misalkan
( )
( )
(
)
(
)
0
0.2 , 10 5000, 10000
0.5 0.5 0.1 0.5 5 5000
r nh nh K nh nh x
h r n n
K n n
= = + =
= ⇒ =
= +
Tabel 6 Nilai x n
(
+1)
dengan x0 =10000dan h=0.5 untuk n=0 sampai dengan n=20
n r
(
0.5n)
K(
0.5n)
x(
(
n+1)
h)
0 0 5000 10000
1 0.1 5005 9535.8598
2 0.2 5010 8780.9884
3 0.3 5015 7949.4689
4 0.4 5020 7189.0058
5 0.5 5025 6563.7497
6 0.6 5030 6083.0105
7 0.7 5035 5730.7541
8 0.8 5040 5483.0093
9 0.9 5045 5315.7683
10 1 5050 5207.9264
11 1.1 5055 5142.1159
12 1.2 5060 5104.7386
13 1.3 5065 5085.6679
14 1.4 5070 5077.7684
15 1.5 5075 5076.3073
16 1.6 5080 5078.3401
17 1.7 5085 5082.1513
18 1.8 5090 5086.806
19 1.9 5095 5091.8279
20 2 5100 5096.9906
Dari tabel diatas dapat kita lihat bahwa pada saat n=0 sampai n=15 nilai x n
(
+1)
mengalami penurunan dan setelah , nilai15
n=
(
1)
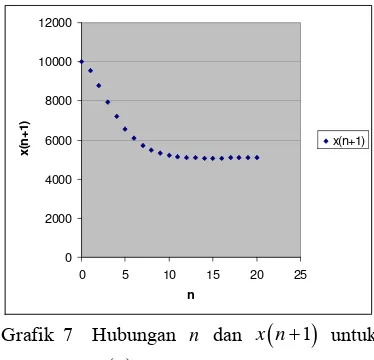
x n+ mengalami kenaikan. Hal ini berarti bahwa, populasi mengalami fluktuasi dan ketika populasi awalnya melebihi daya dukung lingkungannya, maka populasi akan menurun mendekati daya dukung lingkungannya tetapi tidak akan melebihi daya dukung lingkungannya.
0 2000 4000 6000 8000 10000 12000
0 5 10 15 20 25
n
x(
n
+
1)
x(n+1)
Grafik 7 Hubungan dan n x n
(
+1)
untuk( )
0 10000.x =
4.4.3 Contoh Kasus pada Model (3.3) Misalkan
[
0,10]
10 0 110
k h
τ ∈ ⇒ = − =
(dengan 10 subinterval), maka
0; 0 1 1;1 2 2; 2 3 3;3 4
10;10 11
k k
k k
k
k
m
τ τ
τ τ
τ ≤ < ⎧
⎪ ≤ <
⎪
⎪ ≤ <
⎪
= ⎨ ≤ <
⎪ ⎪ ⎪
≤ < ⎪⎩
a. Misalkan populasi awal x
( )
0 =500 dengan tingkat pertumbuhan 1% per tahun(
Ik(
x m( )
k)
=0.01x m( )
k)
, makajumlah populasi yang akan datang dapat diprediksikan sebagai berikut:
(
) ( )
(
(
)
( )
1 0.01
1 1.01 .
k k
k k
)
k
x m x m x m
x m x m
+ − =
+ =
( )
( )
( )
( )
( )
( )
( )
( )
( )
1 1.01 0 1.01 500 505
2 1.01 1 1.01 505 510.05
3 515.15
4 520.3
5 525.5
x x
x x
x
x
x
= = =
= = =
= = =
( )
( )
( )
( )
( )
6 530.75
7 536.06
8 541.42
9 546.83
10 552.29
x
x
x
x
x
= = = = =
b. Misalkan
( )
(
)
0.04( )
,( )
0 500.k k k
I x m = x m x =
( )
( )
( )
( )
( )
( )
( )
( )
( )
1 1.04 0 1.04 500 520
2 1.04 1 1.04 520 540.8
3 562.432
4 584.93
5 608.33
x x
x x
x
x
x
= = =
= = =
= = =
( )
( )
( )
( )
( )
6 632.66
7 657.97
8 684.29
9 711.66
10 740.13
x
x
x
x
x
= = = = =
Dari dua data diatas dapat kita lihat bahwa populasi akan bertambah dari waktu ke waktu.
V. SIMPULAN
Pada persamaan logistik (3.1), ada 2 titiktetap yang diperoleh. Tetapi hanya satu titik tetap yang stabil yaitu pada saat jumlah populasi sama dengan daya dukung lingkungannya. Hal ini berarti bahwa populasi akan selalu menuju daya dukung lingkungannya. Sedangkan pada persamaan logistik tak otonom, tidak diperoleh titik tetap.
Berdasarkan contoh kasus yang telah diperoleh pada model (3.1), ketika populasi awalnya sama dengan nol dan populasi awalnya sama dengan daya dukung lingkungannya, maka populasi akan tetap konstan.
Ketika populasi awalnya kurang dari daya dukung lingkungannya, maka populasi akan meningkat menuju daya dukung lingkungan. Dan ketika populasi awalnya lebih dari daya dukung lingkungannya, maka populasi akan
semakin menurun dan menuju daya dukung lingkungan.
Begitu pula pada model (3.2), ketika populasi awal nol dan populasi awal sama dengan daya dukung lingkungan awal maka populasi tetap konstan. Ketika populasi awal kurang dari daya dukung lingkungan awal, maka populasi akan meningkat. Tetapi tidak akan melebihi masing-masing daya dukung lingkungan. Dan ketika populasi awal lebih dari daya dukung lingkungan awal, maka populasi akan menurun dan pada waktu tert